auswertung
auswertung
auswertung

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
LEICHTWEIS INSTITUT FÜR WASSERBAU<br />
ABT. HYDROLOGIE, WASSERWIRTSCHAFT UND GEWÄSSERSCHUTZ<br />
BACHELOR GEOÖKOLOGIE SS 2011<br />
PROF. DR. HANS MATTHIAS SCHÖNIGER<br />
INSTITUT FÜR GEODÄSIE & PHOTOGRAMMETRIE<br />
DR.-ING. B. RIEDEL<br />
_________________________________________________________________________________<br />
TF 3 GEOÖKOLOGISCHE FELDMETHODEN:<br />
GEODÄTISCHE METHODEN<br />
Geländetag: 03.06. 2011, 7:30 Uhr<br />
Treffpunkt: Lk19c.5 (Vorbesprechnung)<br />
Mitzubringen: DIN A4 Schreibunterlage, festes Schuhwerk, Bleistift, Taschenrechner, Lineal, Geo-Dreieck<br />
Übung: Topographische Vermessung<br />
Themen:<br />
Freie Stationierung - Tachymetrische Geländeaufnahme – Koordinatenberechnung -<br />
Planerstellung<br />
Ziel der topographischen Vermessung (Geländeaufnahme) ist die Herstellung und<br />
Fortführung topographischer Karten. Die Informationen in den Karten gliedern sich in<br />
Lageinformationen (Straßen, Häuser, Gewässer, ....) und Höheninformationen<br />
(Punkthöhen, Höhenlinien, Böschungen, ...), sowie verschiedenen thematischen<br />
Informationen.<br />
Die geometrische Erfassung der Erdoberfläche, ihrer Veränderungen, sowie die Erfassung<br />
des Raumbezuges von Objekten auf der Erdoberfläche ist eine wesentliche Aufgabe der<br />
Geodäsie. Der Raumbezug für die zu erfassenden Objekte wird im allgemeinen durch<br />
einen übergeordneten Koordinatenrahmen, i.d.R. dem Landeskoordinatensystem (GK-<br />
oder UTM-Koordinatensystem) für die Lage und einem amtlichen Höhensystem<br />
(normalorthometrischen Höhen oder NormalHöhen), für ein Gebiet realisiert.<br />
Die Ausgangsbasis für einfache, kleinräumige topographische Vermessungen<br />
(Tachymeteraufnahmen) ist das Arbeiten in einem Koordinatenrahmen der durch amtliche<br />
Lagefestpunkte realisiert ist. Die Höhenfestlegung erfolgt über den Anschluß an amtliche<br />
Höhenpunkte. Die Erfassung der Topographie erfolgt dreidimensional mit Hilfe eines<br />
Tachymeters, das aus einem Zielfernrohr, einer horizontalen Richtungsmesseinheit, einer<br />
vertikalen Winkelmesseinheit und einem elektro-optischen Streckenmessgerät besteht.<br />
Die Beobachtungselemente eines Tachymeters sind somit horizontale Richtung (r,Hz),<br />
Vertikalwinkel (z,V) und die Schrägstrecke (s, D).
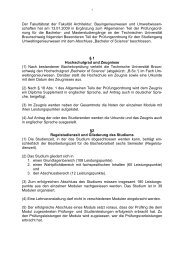
Aufgabenstellung:<br />
Im Rahmen dieser Übung soll für das Übungsgelände Nussberg am Franzschen Feld in<br />
Braunschweig ein Höhenlinienplan mit dem Wegenetz erstellt werden.<br />
Hierzu muß eine Freie Stationierung (in blau) mit Höhenübertragung zur Einbindung in das<br />
Landessystem (Punkte un rot) gemessen werden. Als Anschlüsse an das Landessystem<br />
dienen die Koordinatenmäßig bekannten, gemäß Koordinatenverzeichnis.<br />
Von diesem Standpunkt werden die topographischen Punkte mittels dreidimensionaler<br />
Tachymetrie (in grau) erfaßt.<br />
803<br />
901<br />
951<br />
FS<br />
817<br />
802<br />
950<br />
805
Gebiets- und Koordinatenübersicht des Franzschen Feldes
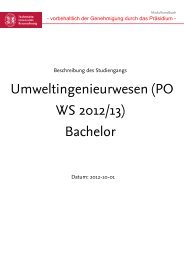
Freie Stationierung mit Höhenübertragung<br />
Nach dem Aufstellen des Statives, dem Zentrieren und Horizontieren des Tachymeters<br />
über einem Lagebezugspunkt (AP oder TP) mit bekannten Koordinaten und dem Messen<br />
der Instrumentenhöhe erfolgt die eigentliche Stationierung (Koordinierung und Teilkreis-<br />
Orientierung) durch Anschlussmessung an die benachbarten Festpunkte oder alternativ<br />
durch eine Freie Stationierung.
Mit Hilfe der Freien Stationierung ist man in der Lage sich dreidimensional in ein<br />
bestehendes Lage- und Höhenfestpunktfeld einzuhängen. Es sind 3, mindestens jedoch 2,<br />
Anschlusspunkte anzumessen, siehe hierzu das nachstehende Feldbuch. Vor dem Abbau<br />
ist zur Kontrolle nochmals ein Festpunkt anzuzielen. Für jeden freigewählten Standpunkt<br />
ist eine neue Punktnummer zu vergeben.<br />
Hoch<br />
Bestimmung der 3D-Koordinaten der Freien Stationierung<br />
Höhe des Standpunktes der Freien Stationierung<br />
Die Höhe des Standpunktes der Freien Stationierung wird durch trigonometrische<br />
Höhenübertragung bestimmt. Die Standpunkthöhe wird durch die gemessenen Zenitwinkel<br />
und Strecken zu den Anschlusspunkten abgeleitet. Bei i = 1, 2, 3 Anschlusspunkten<br />
ergeben sich die Höhenbestimmungen nach folgender Formel:<br />
�hiG<br />
HS,i<br />
x<br />
P 1<br />
= si * cos zi + i - ti<br />
= Hi + �hiG<br />
r s<br />
1,<br />
1<br />
P<br />
N<br />
Die Einzelbestimmungen werden zur Standpunkthöhe Hs = 1/n * ∑HS,i gemittelt.<br />
Lagekoordinaten des Standpunktes<br />
Die Lagekoordinaten der Freien Stationierung werden durch eine<br />
Koordinatentransformation über 2 identische Punkt (Festpunkt 1 und 2). Durch das<br />
Anzielen von 3 Festpunkten hat man die Möglichkeit die Berechnung des Standpunktes zu<br />
kontrollieren. Daher ist es notwendig noch eine zweite Berechnung über die<br />
Festpunktkombination 2 und 3 oder 1 und 3 durchzuführen. Die Differenzen in der<br />
Berechnung der X- und Y-Koordinaten sollte 10 cm nicht überschreiten, ansonsten muss<br />
noch die dritte Kombination berechnet und verglichen werden.<br />
Hierbei bildet das Tachymeter den Ursprung des lokalen Koordinatensystems, siehe obige<br />
Skizze.<br />
y<br />
r ,<br />
s<br />
2 2<br />
r s 3<br />
, 3<br />
P<br />
2<br />
P 3<br />
Rechts
Freie Stationierung<br />
Beobachter: ...........................<br />
Feldbuch: ..............................<br />
Gruppe: ..................................<br />
Ort:...................................................<br />
Instr.: ..................<br />
Nr.: .............<br />
Wetter:................. Datum:..............<br />
Neupunkt : Bitte Zielpunkt 1, 2, 3 in die Skizze eintragen<br />
Richtungsmessung<br />
Zielpunkt<br />
1=<br />
2=<br />
3=<br />
1=<br />
2=<br />
3=<br />
Horizontalrichtung<br />
Lage 1<br />
Zenitwinkelmessung<br />
Zielpunkt<br />
i t<br />
1=<br />
2=<br />
3=<br />
1=<br />
2=<br />
3=<br />
Horizontalrichtung<br />
Lage 2<br />
Zenitwinkel<br />
Lage 1<br />
Lage 1: 0 gon < z < 200 gon<br />
Lage 2: 200 gon < z < 400 gon<br />
Streckenmessung<br />
Zielpunkt Schrägstrecke s<br />
Messung 1,2<br />
1=<br />
2=<br />
3=<br />
Zenitwinkel<br />
Lage 2<br />
Lage 1<br />
reduziert<br />
Mittel aus 1 u. 2 Horizontalstr.<br />
sh = s·sin z<br />
� =<br />
Lage 1 + 2<br />
Lage 2<br />
reduziert<br />
c =<br />
�h = s * cos z<br />
N<br />
400 � �<br />
2<br />
i - t<br />
N ......<br />
Mittel<br />
Lage 1 + Lage 2<br />
z =<br />
Lage 1 + c<br />
�hG���<br />
�h +i-t
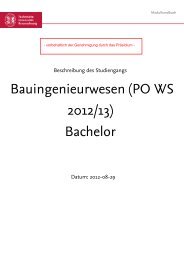
Tachymeteraufnahme<br />
Auswahl der Tachymeterstandpunkte<br />
Für die vollständige Erfassung des Geländes sind mehrere Tachymeterstandpunkte nötig.<br />
Als Standpunkte können bestehende vermarkte Festpunkte (TP’s oder APs) genutzt<br />
werden oder mittels Freier Stationierung temporäre Festpunkte geschaffen werden, von<br />
denen aus die Tachmeterbeobachtungen durchgeführt werden.<br />
Erfassung der Geländepunkte<br />
Die aufzunehmenden Geländepunkte werden mit dem Prismenstab aufgehalten und<br />
angemessen. Die drei Messgrößen zu einem Geländepunkt, nämlich Richtung, Zenitwinkel<br />
und Schrägstrecke, werden zusammen mit der aktuellen Prismenstabhöhe in das<br />
Feldbuch eingetragen und in die ggf. in einer Feldkartierung maßstabs ähnlich kartiert.<br />
Jeder Geländepunkt erhält dabei eine eigene Punktnummer, die in der Feldkartierung und<br />
dem Feldbuch geführt wird. Kartiert wird im Maßstab 1 : 500 mittels Geodreieck und<br />
Gonscheibe. In der Kartierung wird sofort mit dargestellt, welche Bedeutung (Wegerand,<br />
Baum, Böschungskante etc.) der Punkt hat.<br />
Geländeskizze:
Tachymeteraufnahme<br />
Gruppe:<br />
Beobachter: . . . . . . . . . . . . . . . . . . . . . . . . . . . .<br />
Feldbuch: . . . . . . . . . . . . . . . . . . . . . . . . . . . .<br />
Standpunkt<br />
i<br />
Zielpunkt<br />
t<br />
Horizontalrichtung<br />
r<br />
Institut für Geodäsie und Photogrammetrie<br />
Technische Universität Braunschweig<br />
Univ.- Prof. Dr.-Ing. habil. W. Niemeier<br />
Ort: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .<br />
Instr.: . . . . . . . . . . . . . . . .<br />
Zenitwinkel<br />
z<br />
Nr.: . . . . . . . . . . . . . . . .<br />
Schrägstrecke<br />
s<br />
Datum: . . . . . . . . . . . . . . . . . . . . . . . .<br />
Wetter: . . . . . . . . . . . . . . . . . . . . . . . .<br />
Punktbeschreibung<br />
. . . . . . . . . . . . . . . . . . . . , . . . . . . . . Anschlusspunkt<br />
. . , . . . . . . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . , . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . .<br />
. . . . . . . . . . . . . , . . . . . . . . . . . . . . , . . . . . . . . Abschlusspunkt, Kontrolle
1) Freie Stationierung<br />
AUSWERTUNG<br />
Berechnung der Standortkoordinaten über eine Ähnlichkeitstransformation
Für diese Berechnung werden nur die Horizontalstrecken sh aus dem Feldbuch<br />
benützt. Der Winkel � ist die Differenz zweier gemittelter Horizontalrichtungen.<br />
2) Höhe des Standpunktes der Freien Stationierung<br />
Die Höhe des Standpunktes der Freien Stationierung wird durch trigonometrische<br />
Höhenübertragung bestimmt. Die Standpunkthöhe wird durch die gemessenen Zenitwinkel<br />
und Strecken zu den Anschlusspunkten abgeleitet. Bei i = 1, 2, 3 Anschlusspunkten<br />
ergeben sich die Höhenbestimmungen nach folgender Formel:<br />
�hiG<br />
HFS,i<br />
= si * cos zi + i - ti<br />
= Hi + �hiG<br />
Die Einzelbestimmungen werden zur Standpunkthöhe HFS = 1/n * ∑HFS,i gemittelt.
3) Auswertung der Tachmeteraufnahme<br />
Aufbereitung der Meßwerte<br />
Alle gemessenen Schrägstrecken s’i werden mit den gemessenen Zenitwinkeln zi<br />
zu den Horizontalstrecken shi = s’i · sin zi reduziert.<br />
Höhen der Geländepunkte<br />
Die Höhen der Geländepunkte werden durch die trigonometrische<br />
Höhenübertragung bestimmt. Ausgehend von der Höhe des vermarkten<br />
Standpunktes der Freien Stationierung HFS wird die Höhe des einzelnen<br />
Geländepunktes Hg wie folgt bestimmt.<br />
Hg = HFS + �hg = HFS + s’i *cos zi +i -t<br />
Lagekoordinaten der Geländepunkte<br />
Die Lagekoordinaten der Geländepunkte werden mittels der Koordinatenberechnung<br />
aus Polarelementen bestimmt.<br />
Berechnung des Richtungswinkels tFS TP im Standpunkt FS bzgl. eines Festpunktes<br />
TP:<br />
t<br />
TP<br />
FS<br />
YTP<br />
- YFS<br />
� arctan<br />
XTP � XFS<br />
, Quadranten beachten<br />
Umrechnung der gemessenen Schrägstrecken si in Horizontalstrecken sh:<br />
sh = si * sin zi<br />
Umrechnung von Polarelementen in kartesische Koordinaten:<br />
Xg = XFS + �X = XFS+ sh *cos ( tFS TP + (rp-rTP))<br />
Yg = YFS + �Y = YFS+ sh *sin ( tFS TP + (rp-rTP))
Berechnung von Strecke und Richtungswinkel aus Koordinaten<br />
Koordinatenberechung aus Polarelementen
4) Anmerkungen zur häuslichen Ausarbeitung<br />
� Es ist eine Rahmenkarte im Maßstab 1:1000 („1mm auf der Karte entspricht 1m in der Natur“)<br />
mit Höhenlinien zu erstellen.<br />
� Für Gestaltung der Kartierung ist die DIN 18702 „Zeichen für Vermessungsrisse, großmaßstäbige<br />
Karten und Pläne“ anzuwenden.<br />
� Die Kartierung trägt keinen Nordpfeil. Die Nordrichtung ist aus dem Koordinatenrahmen<br />
ersichtlich.<br />
� Höhenlinien werden nicht über Wege hinweg interpoliert, weil der Weg i.d.R. eine Querneigung<br />
aufweist, die nicht der Neigung des umliegenden Geländes entspricht.<br />
� Einige wenige Höhenzahlen werden ohne Einheit in die Linie mit dem Fuß zum Tal<br />
geschrieben.<br />
� Wenn unterschiedliche Signaturen für die Meter-, Halb-Meter- und Viertel-Meter-Linien benutzt<br />
werden, ist es ausreichend, die Meter-Linien zu beschriften.<br />
� Geländepunkte werden nicht beschriftet.<br />
Oder automatische Generierung eines Höhenplanes über das Einspielen<br />
der 3D-Koordinaten in ARCGIS<br />
Kartierung:<br />
38500<br />
38600<br />
38700<br />
27900 27900<br />
27800<br />
27700<br />
27600<br />
27800<br />
27700<br />
27600<br />
HVÜ-Übung 4 Tachymeteraufnahme<br />
Schönhagen im Juli 1999<br />
Gruppe 3 stud.-ing. Bernd Mustermann<br />
Maßstab 1:1000<br />
27500 27500<br />
38500<br />
38600 38700
Höhenlinieninterpolation<br />
Lineare Höhenlinieninterpolation zwischen zwei Geländepunkten, entnommen Kahmen (1993): Vermessungskunde,<br />
18. Auflage.<br />
Anmerkung: Die Strecke 28,3 im Grundriß entspricht dem horizontalen Abstand zweier Punkte aus<br />
Koordinaten berechnet..
Koordinatensysteme in der Ebene<br />
Die Lage eines Punktes in der Ebene kann entweder in einem<br />
polaren Koordinatensystem oder in einem kartesischen<br />
Koordinatensystem eindeutig festgelegt werden.<br />
Polare Koordinaten (s, (s �) �)<br />
X<br />
0<br />
�<br />
s<br />
Richtungswinkel t AB - der rechtsläufig gezählte<br />
Winkel zwischen der Abszissenachse<br />
eines geodätischen Koordinatensystems<br />
bzw. einer Parallelen zu dieser<br />
und der Richtung zu einem Ziel.<br />
P<br />
Kartesische Koordinaten (x (x, y)<br />
X<br />
P<br />
x<br />
0<br />
X<br />
0<br />
y<br />
t AB<br />
A<br />
B<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
Y<br />
Y<br />
1
Rechtwinklige und polare Koordinaten<br />
Polare und rechtwinklige Koordinaten können problemlos unter<br />
Nutzung trigonometrischer Beziehungen ineinander überführt<br />
werden.<br />
Erste Grundaufgabe<br />
Gegeben: t 12 und s 12<br />
Gesucht: �x 12 und �y 12<br />
Lösung: �y 12 = S 12 sin t 12<br />
�x 12 = S 12 cos t 12<br />
Zweite Grundaufgabe<br />
Gegeben: g �x 12 und �yy 12<br />
Gesucht: t12 und s12 Lösung:<br />
?<br />
20 m<br />
x<br />
2 2<br />
s12 = �y12 + �x12 �y 12<br />
t 12 = arctan ( )<br />
�x 12<br />
x<br />
x 2<br />
x 1<br />
x<br />
x 2<br />
x 1<br />
�x12 t12 y 1<br />
P 1<br />
�x12 t12 y 1<br />
P 1<br />
�y 12<br />
s 12<br />
�y 12<br />
Erste Grundaufgabe - Zahlenbeispiel<br />
20 m<br />
60 gon<br />
1<br />
Lösung: (klicken um Lösungsschritte anzuzeigen)<br />
�y12 = S12 sin t12 = 100·sin(60) = 80,90 m<br />
�x12 = S12 cos t12 = 100·cos(60) = 58,78 m<br />
y2 = y1 + �y12 = 100,90 m<br />
x2 = x1 + �x12 = 78,78 m<br />
?<br />
2<br />
y<br />
s 12<br />
P 2<br />
y 2<br />
y 2<br />
P 2<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
Gegeben: g t 12 und s 12<br />
x1 und y1 Gesucht: �x12 und �y12 x2 und y2 aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
y<br />
y<br />
2
Richtungsquadranten<br />
Da die Arctan - Funktion nur im ersten Quadrant (0 - 100 gon)<br />
eindeutig ist, müssen die Richtungwinkel in den restlichen<br />
Bereichen des Vollkreises unter Zuhilfenahme weiterer<br />
Parameter bestimmt werden.<br />
t12 = 400gon �y12 + arctan ( )<br />
�x12 IV<br />
�y = –<br />
�x = +<br />
III<br />
�y = –<br />
�x = –<br />
t12 = 200gon �y12 + arctan ( )<br />
�x12 50 m<br />
20 m<br />
x<br />
Lösung:<br />
x<br />
I<br />
�y = +<br />
�x = +<br />
�y12 t12 = arctan ( )<br />
�x12 y<br />
II<br />
�y = +<br />
�x = –<br />
t12 = 200gon �y12 + arctan ( )<br />
�x12 Zweite Grundaufgabe - Zahlenbeispiel<br />
1<br />
20 m<br />
?<br />
60 m<br />
(klicken um Lösungsschritte anzuzeigen)<br />
2<br />
y<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
Gegeben: x1 und y1 x x2 und y 2<br />
Gesucht: t12 und s12 s12 = �y12 + �x12 = (60 - 20) 2 + (20 - 50) 2 2 2<br />
= 50 m<br />
�y = + �x = – 2. Quadrant<br />
t12 = 200gon �y12 + arctan ( ) = 200 - 59,033 = 140,967 gon<br />
�x12 aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
3
Ähnlichkeitstransformation<br />
Gegeben: Koordinaten der Punkte A, E, P ... im Quellsystem<br />
Koordinaten der Punkte A, E im Zielsystem<br />
Gesucht: Koordinaten der Punkte P ... im Zielsystem<br />
Quellsystem<br />
Zielsystem<br />
x q<br />
A<br />
tAE sAE E<br />
y q<br />
2<br />
sAE = (�xAE + �yAE )<br />
�yAE tAE = arctan( )<br />
�xAE 2<br />
T AE<br />
A<br />
S AE<br />
E<br />
S AE = (�X AE + �Y AE )<br />
T AE = arctan( )<br />
Ähnlichkeitstransformation<br />
xq Ablauf<br />
1. Berechne den Maßstabfaktor m = S AE / s AE<br />
2. Berechne den Drehwinkel � = T AE - t AE<br />
3. Berechne die Transformationskonstanten a und o<br />
a = mcos(�) m cos(�)<br />
o = m sin(�)<br />
4. Berechne die transformierten Koordinaten aller Punkte<br />
X P = X A + �x AP ·a - �y AP·o<br />
Y P = Y A + �x AP ·o + �y AP·a<br />
A<br />
E<br />
P<br />
y q<br />
2<br />
2<br />
�Y AE<br />
�X AE<br />
4
Ähnlichkeitstransformation<br />
Zahlenbeispiel<br />
x<br />
120<br />
60<br />
20<br />
20<br />
A<br />
80<br />
P<br />
120<br />
(Klicken um Lösungsschritte anzuzeigen)<br />
1. m = S AE / s AE = 1,0006<br />
E<br />
y<br />
AE AE ,<br />
2. � = T AE - t AE = 14,44 gon<br />
3. a = m cos(�) = 0,975<br />
o = m sin(�) = 0,225<br />
�xAE = 100 m<br />
�yAE = 100 m<br />
= 141,42 m<br />
= 50 gon<br />
sAE tAE 4. X P = X A + �x AP ·a - �y AP·o = 105,50 m<br />
Y P = Y A + �x AP ·o + �y AP·a = 127,50 m<br />
Freie Standpunktwahl<br />
Gegeben: Koordinaten der zwei Festpunkte<br />
Richtungen g und Strecken zu den<br />
Festpunkten von dem Standpunkt aus<br />
Gesucht: Koordinaten des Gerätestandpunktes<br />
�X AE = 75 m<br />
�Y AE = 120 m<br />
S AE = 141,51 m<br />
T AE = 64,44 gon<br />
Betrachtet man den Standpunkt als Zentrum eines örtlichen<br />
Koordinatensystems, kann die Aufgabe durch eine<br />
Koordinatentransformation gelöst werden.<br />
X<br />
A<br />
s PA<br />
�<br />
P<br />
s PB<br />
B<br />
Y<br />
5
X<br />
X A<br />
X XB ?<br />
Freie Standpunktwahl<br />
Gegeben: Koordinaten der zwei Festpunkte (X A, Y A, X B, Y B)<br />
Winkel � und Strecken s PA , s PB<br />
Y A<br />
A<br />
s PA<br />
P<br />
Gesucht: Koordinaten X P und Y P<br />
B<br />
Y<br />
Lösung:<br />
yA = 0 xA = sPA yB = sPB sin(�) xB = sPB cos(�)<br />
s AB = (�x AB + �y AB)<br />
�yAB tAB = arctan( )<br />
2<br />
�x �x AB<br />
� sPB m = SAB / sAB � = TAB –tAB ?<br />
Y B<br />
a = m cos(�) o = m sin(�)<br />
X P = X A - s PA·a Y P = Y A -s PA·o<br />
Trigonometrisches Höhenübertragung<br />
Wenn keine direkte Sichtverbindung besteht, so können die<br />
trigonometrischen Höhenmessungen durch die Messung der<br />
Zenitwinkel und Entfernungen hintereinander angeordneter<br />
Standpunkte durchgeführt werden.<br />
HP A<br />
�h 1 Zr Z v<br />
�h 2<br />
Z r<br />
Z v<br />
�h 3<br />
Z r<br />
�H = �(�h i)<br />
Z v<br />
�h 4<br />
Zr Zv<br />
�h i<br />
HP B<br />
Wegen des schnell wachsenden Refraktionseinflusses liegt<br />
der optimale Abstand zwischen den Standpunkten im<br />
Bereich von 300 bis 500 m.<br />
2<br />
�H<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
6
Z<br />
Standpunkt<br />
S S<br />
S h<br />
Streckenmessung<br />
Zielpunkt Sh � S i s * sin z<br />
i i<br />
d H<br />
dh S z<br />
i cos * �<br />
i<br />
Tachymetrie<br />
s<br />
i<br />
Shi Shi � 7,<br />
620m*<br />
sin 77,<br />
684gon<br />
� 7,<br />
158m<br />
dh � 7,<br />
620m*<br />
cos77,<br />
684gon<br />
i<br />
dh � 2,<br />
617m<br />
Tachymetrie ist die Messmethode, mit der sich eine Geländeaufnahme<br />
nach Grundriss und Höhe durch die Messung von<br />
Richtungen, Strecken und Höhenunterschieden vom Instrumentenstandpunkt<br />
aus schnell durchführen lässt.<br />
A<br />
Draufsicht<br />
� 1<br />
S A1<br />
1<br />
A<br />
B<br />
B<br />
i<br />
H A<br />
A<br />
i<br />
Vertikalschnitt<br />
Z i<br />
1<br />
S A1<br />
1<br />
t<br />
H1<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
7
Polares Anhängen<br />
Das „Polare Anhängen“ wird nach den Formeln der ersten<br />
Grundaufgabe gelöst. Der Richtungswinkel wird dabei aus den<br />
vorhandenen Koordinaten bzw. Winkelmessungen ermittelt.<br />
Gegeben: Koordinaten der Punkte P1 und P2 (x1, y1, x2, y2) Gemessen: Winkel �2 und Strecke s23 Gesucht: Koordinaten des Punktes P3 (x3, y3) ?<br />
x<br />
?<br />
x2 x1 x<br />
� �<br />
y 2<br />
s 23<br />
P 2<br />
P 3<br />
?<br />
y 1<br />
P 1<br />
y<br />
Lösung:<br />
t23 = t12 � 200 + �2 x 3 = x 2 + s 23�cos(t 23)<br />
y 3 = y 2 + s 23�sin(t 23)<br />
Polares Anhängen - Zahlenbeispiel<br />
60 m<br />
P 3<br />
60 m P 1<br />
40 m<br />
350 gon<br />
30 m<br />
Lösung:<br />
P 2<br />
?<br />
90 m<br />
(klicken um Lösungsschritte anzuzeigen)<br />
�y12 y 3 = y 2 + s 23 � sin(t 23) = 56,833 m<br />
y<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
Gegeben: x1, y1, x2, y2 Gemessen: � �2 = 350 gon<br />
s23 = 60 m<br />
Gesucht: x3, y3 t12 = 200 + arctan ( ) = 200 + 79,517 = 279,517 gon<br />
�x12 t23 = t12 � 200 + �2 = 29,517 gon<br />
x3 = x2 + s23 � cos(t23) = 93,67 m<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
8
i<br />
Trigonometrische Höhenbestimmung<br />
Wird von einem Standpunkt aus der Vertikalwinkel und die<br />
horizontale Entfernung zu einem anderen Punkt gemessen,<br />
lässt sich die Höhe zwischen den Punkten trigonometrisch<br />
übertragen. g<br />
A<br />
Z AB t<br />
Ss AB<br />
B<br />
t<br />
�hAB B<br />
A<br />
Z AB<br />
�h AB = Ss AB cos(Z AB)<br />
H B = H A + �h AB + i - t<br />
Ss AB<br />
i H B<br />
H A<br />
aus Resnik/Bill: Vermessungskunde ..., 2003.<br />
9