Unter der Staleke 222, Sommer 2021
Heimatzeitung für die Gemeinde Hagen im Bremischen – Die STALEKE erscheint vier Mal im Jahr und wird kostenlos an alle Haushalte der Gemeinde Hagen im Bremischen verteilt.
Heimatzeitung für die Gemeinde Hagen im Bremischen – Die STALEKE erscheint vier Mal im Jahr und wird kostenlos an alle Haushalte der Gemeinde Hagen im Bremischen verteilt.

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
WULSBÜTTEL. „Wir haben die<br />
Testreihe mit unserem Marsrover<br />
in Wulsbüttel erfolgreich<br />
abgeschlossen“, erklärt Diplom-Ingenieur<br />
Florian Cordes<br />
vom Deutschen Forschungsinstitut<br />
für künstliche Intelligenz in<br />
Bremen. Die <strong>der</strong>zeitige Pandemie<br />
machte die Reiseplanung<br />
zunichte. Statt in Fuerte Ventura<br />
erprobte das Institut den<br />
autonom agierenden Roboter<br />
in einer Sandgrube an <strong>der</strong> Landesstraße<br />
135 im Bereich Wulsbüttel.<br />
Das vierrädrige Gerät<br />
nennt sich Sherpa TT und soll<br />
als mobile Station kleinere<br />
Roboter bei einem Einsatz im<br />
Weltraum führen.<br />
„Wir konnten 500 Meter fehlerfrei<br />
autonom zurücklegen“,<br />
freut sich Cordes. Der Projektleiter<br />
Weltraumrobotik blickt<br />
zufrieden auf die fünfwöchige<br />
Testphase in <strong>der</strong> Sandgrube bei<br />
Wulsbüttel zurück. Das Gerät<br />
operiert autonom, das heißt es<br />
fährt nach eigenem Ermessen<br />
auch durch unwegsames Gelände.<br />
Dazu liefern vier Kameras<br />
die Informationen an einen<br />
integrierten Rechner, <strong>der</strong> diese<br />
in Bewegungen umsetzt. An<br />
jedem <strong>der</strong> vier spinnenartigen<br />
Beine treiben metallring gefe<strong>der</strong>te<br />
Rä<strong>der</strong> das etwa 100 Kilogramm<br />
schwere Fahrzeug an.<br />
Im späteren Einsatzfall kann<br />
<strong>der</strong> angebaute Greifarm zum<br />
Wechsel <strong>der</strong> Betriebsbatterien,<br />
zum Graben von Erdproben mit<br />
einer Schaufel o<strong>der</strong> als Kran<br />
verwendet werden.<br />
Rückwärtsfahren geht bisher nur mit „vor Ort“ Steuerrung. Der spanische<br />
Forschungsteilnehmer Raul fährt den Sherpa zurück zum Ausgangspunkt seiner<br />
autonom zurückgelegten Wegstrecke.<br />
Testreihe mit dem Marsrover<br />
in Wulsbüttel<br />
„Wir erproben hier die Software<br />
für die autonome Bewegung“,<br />
erklärt Cordes und zeigt die<br />
zahlreichen Markierungen auf<br />
dem etwa 1500 Quadratmeter<br />
großen Sandabbaugelände.<br />
„Die Firma Pauls zeigte sich für<br />
unsere Anfrage sofort aufgeschlossen“,<br />
sagt Florian Cordes,<br />
<strong>der</strong> dieses Gelände nach Auswertung<br />
einiger Alternativen<br />
auswählte.<br />
Die Firma Pauls zeigte<br />
sich sofort aufgeschlossen<br />
Der Eigentümer aus Lehnstedt<br />
bereitete die Erprobungsfläche<br />
nach Wünschen <strong>der</strong> Forscher<br />
vor und platzierte einige große<br />
Steine zum Test <strong>der</strong> Beweglichkeit<br />
des „Sherpa“. Ziel des Projektes<br />
ADE (Autonomous DEcision<br />
making) ist es, ein Rover<br />
System zu entwickeln, welches<br />
geeignet ist, die Datengewinnung<br />
auf autonomen planetaren<br />
Missionen zu erhöhen. Das<br />
C Andreas Palme (3)<br />
System wird in <strong>der</strong> Lage sein,<br />
lange autonome Fahrmanöver<br />
die größer als 1 km sind,<br />
durchzuführen und dabei eine<br />
schnelle Reaktion auf unvorhergesehene<br />
Ereignisse und<br />
optimale Nutzung <strong>der</strong> zur Verfügung<br />
stehenden Ressourcen<br />
zu gewährleisten.<br />
Das System aus Hardware- und<br />
Softwarekomponenten wird in<br />
einem analogen Terrain (Mars<br />
o<strong>der</strong> Mond ähnlich) eingehend<br />
getestet. Hauptziel des Projektes<br />
ist die Durchführung einer<br />
langen autonomen Fahrt in<br />
natürlichem Gelände. Hierbei<br />
wird ein Zielpunkt vorgegeben,<br />
woraufhin das ADE System<br />
einen sicheren Pfad plant und<br />
autonom abfährt. Das System<br />
wird eigenständig lokale Planän<strong>der</strong>ungen<br />
vornehmen, um<br />
wissenschaftlich interessante<br />
Stellen selbstständig näher<br />
untersuchen zu können.<br />
Aktuell haben die Wissenschaftler<br />
das Gelände an <strong>der</strong><br />
L 135 mit einer Drohne überflogen<br />
und damit ein Abbild<br />
<strong>der</strong> Infrastruktur für die autonomen<br />
Fahrwege gesichert.<br />
Eine gleichbleibende Datenaufnahme<br />
und die Vermeidung<br />
des Übersehens interessanter<br />
Daten ist eines <strong>der</strong> Ziele im Projekt<br />
ADE.<br />
So ist wichtig, dass erfolgversprechende<br />
Merkmale in <strong>der</strong><br />
Umgebung, wie etwa interessante<br />
Steinformationen, für<br />
geologische <strong>Unter</strong>suchungen<br />
vom "Opportunistic Science<br />
Agent" autonom erkannt werden<br />
und daraufhin eine lokale<br />
Än<strong>der</strong>ung des Missionsplanes<br />
vorgenommen wird. Darüber<br />
hinaus sollen Zielkonflikte,<br />
beispielsweise zwischen globalem<br />
und lokalem Plan, von<br />
<strong>der</strong> ADAM-Komponente gelöst<br />
werden. ADAM steht hierbei für<br />
Autonomous Decision Making<br />
Module. Diese Komponente<br />
basiert auf <strong>der</strong> Integration von<br />
Updates aus Ergebnissen <strong>der</strong><br />
vorherigen EU-Projekten, die<br />
jeweils mit 3 Millionen Euro<br />
geför<strong>der</strong>t werden. ADAM ist<br />
dafür verantwortlich, dass <strong>der</strong><br />
globale Plan sicher modifiziert<br />
wird, wenn interessante wissenschaftliche<br />
Merkmale in <strong>der</strong><br />
Umgebung gefunden werden.<br />
Diese Modifikationen werden<br />
unter Berücksichtigung <strong>der</strong><br />
Sicherheit, Systemrandbedingungen,<br />
On-Bord-Ressourcen<br />
und zeitlicher Beschränkungen<br />
vorgenommen. Mit <strong>der</strong> Demonstration<br />
in einer repräsentativen,<br />
natürlichen Umgebung<br />
wird ADE in schrittweise komplexeren<br />
Szenarien erprobt.<br />
Derzeit liegt die Testverantwortung<br />
bei den Partnern aus<br />
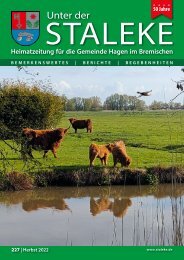
Der Sherpa ist ein autonom fahrendes Forschungsgerät für den Einsatz im Weltraum.<br />
Die Forscher des DFKI haben in einer Sandgrube bei Wulsbüttel passende Verhältnisse<br />
für ihren Testbetrieb gefunden.<br />
40 | SOMMER <strong>2021</strong><br />
UNTER DER STALEKE