Festigkeitslehre Prof. Schmidt Kapitel 11 - Institut für Allgemeine ...
Festigkeitslehre Prof. Schmidt Kapitel 11 - Institut für Allgemeine ...
Festigkeitslehre Prof. Schmidt Kapitel 11 - Institut für Allgemeine ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Prof</strong>. Dr.-Ing. R. <strong>Schmidt</strong><br />
Mechanik<br />
<strong>Festigkeitslehre</strong><br />
c○ Copyright 2008 <strong>Prof</strong>. Dr.-Ing. R. <strong>Schmidt</strong><br />
Lehrstuhl und <strong>Institut</strong> <strong>für</strong> <strong>Allgemeine</strong> Mechanik<br />
RWTH Aachen<br />
Die vorliegende Publikation ist urheberrechtlich geschützt. Alle Rechte vorbehalten.<br />
Kein Teil dieses Dokumentes darf in irgendeiner Form ohne schriftliche Genehmigung<br />
des Autors reproduziert, verarbeitet oder verbreitet werden.<br />
2. Auflage
Inhaltsverzeichnis<br />
<strong>11</strong> Stabilität elastischer Strukturen 1<br />
<strong>11</strong>.1 Knicken zentrisch gedrückter Stäbe . . . . . . . . . . . . . . . . . . . . . . . . . 1<br />
<strong>11</strong>.2 Knicken als Eigenwertproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3<br />
<strong>11</strong>.2.1 Der 1.Eulersche Knickfall . . . . . . . . . . . . . . . . . . . . . . . . . . 3<br />
<strong>11</strong>.2.2 Der 2.Eulersche Knickfall . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
<strong>11</strong>.2.3 Der 3.Eulersche Knickfall . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
<strong>11</strong>.2.4 Der 4.Eulersche Knickfall . . . . . . . . . . . . . . . . . . . . . . . . . . 18<br />
I
<strong>11</strong> Stabilität elastischer Strukturen 1<br />
<strong>11</strong> Stabilität elastischer Strukturen<br />
<strong>11</strong>.1 Knicken zentrisch gedrückter Stäbe<br />
In diesem <strong>Kapitel</strong> wollen wir uns mit der Stabilität elastischer Strukturen beschäftigen, wo-<br />
bei wir uns auf Fachwerkkonstruktionen sowie ebene Balken- und Rahmenkonstruktionen be-<br />
schränken werden. Derartige Strukturen sind stabilitätsgefährdet, wenn in ihnen Bauteile bzw.<br />
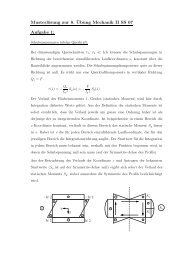
Strukturbereiche enthalten sind, die durch Druckkräfte belastet werden. Wir betrachten deshalb<br />
zunächst in Abb.<strong>11</strong>.1 Druckstäbe mit unterschiedlichen Randbedingungen.<br />
Abb. <strong>11</strong>.1: Druckstäbe<br />
Ist die Belastung P hinreichend klein, so erhält man lediglich eine Stauchung mit einer Längen-<br />
änderung ∆ℓ = P ℓ/E I (siehe Gl.(4.?)), die linear mit der Druckkraft anwächst. Die Verfor-<br />
mung ist so klein, dass man die Gleichgewichtsbedingungen zur Berechnung von Auflagerreak-<br />
tionen und Schnittgrößen in der unverformten Konfiguration aufstellen kann. Das System hat<br />
nur eine mögliche, nämlich die in Abb.<strong>11</strong>.1 vertikale Gleichgewichtslage. Diese ist stabil, da das<br />
System bei einer Störung wieder in die Gleichgewichtslage zurückkehrt.<br />
Erreicht die Belastung jedoch eine gewissen kritischen Wert, so kann der Stab, wie in Abb.<strong>11</strong>.1<br />
dargestellt, bei einer Störung der vertikalen Gleichgewichtslage seitlich ausweichen. Diesen Vor-<br />
gang nennt man Knicken. Der kritische Wert der Druckkraft , bei dem Knicken auftreten kann,
2 <strong>11</strong> Stabilität elastischer Strukturen<br />
wird im Folgenden mit PK bezeichnet und heißt kritische Last oder Knicklast.<br />
Bei Überschreiten der Knicklast existieren also zwei mögliche Gleichgewichtslagen, die <strong>für</strong> den<br />
zweifach gelenkig gelagerten Stab in Abb.<strong>11</strong>.2 bzw. <strong>für</strong> den einseitig eingespannten Stab in<br />
Abb.<strong>11</strong>.3 dargestellt sind.<br />
Abb. <strong>11</strong>.2: Gleichgewichtslagen des gelenkig gelagerten Stabs <strong>für</strong> P > PK<br />
Abb. <strong>11</strong>.3: Gleichgewichtslagen des eingespannten Stabs <strong>für</strong> P > PK
Knicken als Eigenwertproblem 3<br />
Die in Abb.<strong>11</strong>.2 und <strong>11</strong>.3 links dargestellten Gleichgewichtslagen sind labil, denn bei der ge-<br />
ringsten Störung kehrt das betreffende Sytem nicht mehr in diese Gleichgewichtslage zurück,<br />
sondern knickt aus und nimmt die jeweils rechts dargestellte Gleichgewichtslage ein. Diese ist<br />
stabil, denn bei einer Störung des Gleichgewichts kehrt das System in diese Lage zurück.<br />
Abschließend sei noch erwähnt, dass auch nach Überschreiten der kritischen Last sowohl in der<br />
labilen als auch in der stabilen, ausgeknickten Konfiguration die Belastung weiter erhöht wer-<br />
den kann. In der labilen, vertikalen Gleichgewichtslage wächst dann dann die Längenänderung<br />
nach Gl.(4.?) weiter linear mir der Druckkraft an.<br />
Auch nach dem Ausknicken kann das System weiter belastet werden. Wir befinden uns hier<br />
aber im Bereich großer Verschiebungen, sodass unsere in <strong>Kapitel</strong> 6 getroffenen Voraussetzungen<br />
(w ≪ h) der linearen Balkentheorie nicht mehr erfüllt sind. Will man die Verschiebungen<br />
eines ausgeknickten Stabs bei einer bestimmten Last P > PK berechnen, so muss man eine<br />
Balkentheorie höherer Ordnung (geometrisch nichtlineare Balkentheorie) verwenden. Darauf<br />
können wir jedoch im Rahmen dieser Vorlesung nicht eingehen.<br />
<strong>11</strong>.2 Knicken als Eigenwertproblem<br />
Wir wollen nun die Knicklasten <strong>für</strong> einige technisch wichtige Systeme bestimmen und betrachten<br />
dazu die so genannten vier Eulerschein Knickfälle (Leonard Euler (1707-1783)).<br />
<strong>11</strong>.2.1 Der 1. Eulersche Knickfall<br />
Dieser Knickfall wurde bereits in Abb.<strong>11</strong>.1 bzw. Abb.<strong>11</strong>.2 dargestellt. In Abb.<strong>11</strong>.4 wird nun das<br />
Gleichgewicht am verformten System untersucht. Das Momentengleichgewicht um das Festlager<br />
A liefert zunächst H = 0. Aus dem Kräftegleichgewicht erhält man dann Az = 0 sowie Ax = P .
4 <strong>11</strong> Stabilität elastischer Strukturen<br />
Abb. <strong>11</strong>.4: Auflagerkräfte und Schnittgrößen beim 1.Eulerschen Knickfall<br />
In Abb.<strong>11</strong>.4 wurden die positiven Schnittgrößen an einem positiven Schnittufer gemäß der im<br />
Vorlesungsteil Statik getroffenen Konventionen eingezeichnet. Das Momentengleichgewicht um<br />
die Schnittstelle x liefert:<br />
� M0 = 0 : M (x) = PK w (x) . (<strong>11</strong>.1)<br />
Mit Hilfe der Differentialgleichung der Biegelinie Gl.(6.158) erhält man<br />
Somit folgt<br />
oder<br />
wobei die Ableitung<br />
eingeführt wurde.<br />
EI w ′′ (x) = −M (x) (<strong>11</strong>.2)<br />
= −PK w (x) (<strong>11</strong>.3)<br />
EI w ′′ (x) + PK w (x) = 0 (<strong>11</strong>.4)<br />
w ′′ (x) + λ 2 w (x) = 0 , (<strong>11</strong>.5)<br />
λ 2 = PK<br />
EI<br />
(<strong>11</strong>.6)
Knicken als Eigenwertproblem 5<br />
Gl.(<strong>11</strong>.5) ist eine homogene Differentialgleichung zweiter Ordnung. Ihre Lösung lautet<br />
w (x) = c1 sin λx + c2 cosλx . (<strong>11</strong>.7)<br />
Dies kann leicht gezeigt werden, wenn man Gl.(<strong>11</strong>.7) und deren zweite Ableitung in Gl.(<strong>11</strong>.5)<br />
einsetzt. Die zweite Ableitung erhält man durch zweimaliges Differenzieren über<br />
w ′ (x) = c1 λ cosλx − c2 λ sin λx (<strong>11</strong>.8)<br />
w ′′ (x) = −c1 λ 2 sin λx − c2 λ 2 cosλx . (<strong>11</strong>.9)<br />
Einsetzen von Gl.(<strong>11</strong>.9) und Gl.(<strong>11</strong>.7) in die Differentialgleichung Gl.(<strong>11</strong>.5) liefert nun<br />
−c1 λ 2 sin λx − c2 λ 2 cos λx + λ 2 (c2 sin λx + c2 cosλx) = 0 . (<strong>11</strong>.10)<br />
Man erkennt, dass die Differentialgleichung durch den Lösungsansatz Gl.(<strong>11</strong>.7) tatsächlich iden-<br />
tisch befriedigt wird.<br />
Der Lösungsansatz Gl.(<strong>11</strong>.7) muss die geometrischen Randbedingungen<br />
und<br />
erfüllen. Gl.(<strong>11</strong>.7) liefert mit Gl.(<strong>11</strong>.<strong>11</strong>) bzw. Gl.(<strong>11</strong>.12)<br />
Aus Gl.(<strong>11</strong>.13) folgt<br />
Aus Gl.(<strong>11</strong>.14) folgt mit Gl.(<strong>11</strong>.15)<br />
w (0) = 0 (<strong>11</strong>.<strong>11</strong>)<br />
w (l) = 0 (<strong>11</strong>.12)<br />
c1 sin 0 + c2 cos 0 = 0 , (<strong>11</strong>.13)<br />
c1 sin λℓ + c2 cos λℓ = 0 . (<strong>11</strong>.14)<br />
c2 = 0 . (<strong>11</strong>.15)<br />
c1 sin λℓ = 0 . (<strong>11</strong>.16)
6 <strong>11</strong> Stabilität elastischer Strukturen<br />
Diese Gleichung hat die Lösungen<br />
und<br />
c1 = 0 (<strong>11</strong>.17)<br />
sin λℓ = 0 =⇒ λℓ = π, (2 π, . . .) . (<strong>11</strong>.18)<br />
Die erste Lösung (c1 = 0) ist die so genannte triviale Lösung, denn sie führt mit c2 = 0 (siehe<br />
Gl.(<strong>11</strong>.14)) im Lösungsansatz Gl.(<strong>11</strong>.7) zu w(x) = 0 (keine Auslenkung). Dies beschreibt die<br />
vertikale, labile Gleichgewichtslage in Abb.bild10.2.<br />
Die zweite Lösung (sin λℓ = 0) ist die so genannte nicht triviale Lösung. Im Hinblick auf später<br />
zu behandelnde komplizierte Fälle sei angemerkt, dass man die nicht triviale Lösung eines<br />
homogenen Gleichungssystems auch ermitteln kann, indem man die Koeffizientendeterminante<br />
zu Null setzt. Im Falle des obigen Gleichungssystems, bestehend aus Gl.(<strong>11</strong>.13) und (<strong>11</strong>.14) ist<br />
diese<br />
D =<br />
� �<br />
� �<br />
� 0 1 �<br />
� �<br />
� �<br />
� sin λℓ cosλℓ �<br />
(<strong>11</strong>.19)<br />
= 0 cosλℓ − 1 sin λℓ (<strong>11</strong>.20)<br />
= − sin λℓ (<strong>11</strong>.21)<br />
und somit folgt aus D = 0 wie in Gl.(<strong>11</strong>.18) die Lösung sin λℓ = 0.<br />
Diese nicht trivivale Lösung liefert eine Reihe ausgezeichneter Werte (siehe Gl.( <strong>11</strong>.18))<br />
λ = π<br />
ℓ ,<br />
� 2 π<br />
ℓ<br />
, . . .<br />
und damit ausgezeichneter Werte <strong>für</strong> die Knicklast Pk (siehe Gl.(<strong>11</strong>.6))<br />
PK =<br />
EI π2<br />
ℓ 2 ,<br />
�<br />
EI (2π) 2<br />
ℓ 2<br />
�<br />
, . . .<br />
�<br />
(<strong>11</strong>.22)<br />
, (<strong>11</strong>.23)<br />
<strong>für</strong> die eine zweite, ausgelenkte Gleichgewichtslage möglich ist. Die λ-Werte in (Gl.(<strong>11</strong>.22)) hei-<br />
ßen Eigenwerte des Problems. Von praktischer Bedeutung sind nur der kleinste Eigenwert und
Knicken als Eigenwertproblem 7<br />
die kleinste Knicklast, da bei deren Erreichen der Stab infolge einer Störung der Ausgangslage<br />
bereit versagt. Das Stabilitätskriterium <strong>für</strong> den 1.Eulerschen Knickfall lautet also<br />
P <<br />
E I π2<br />
ℓ 2<br />
. (<strong>11</strong>.24)<br />
Wir wollen jetzt noch die Gleichung der Biegelinie <strong>für</strong> den ausgeknickten Stab berechnen. Dazu<br />
gehen wir von dem Lösungsansatz Gl.(<strong>11</strong>.7) aus und sehen Gl.(<strong>11</strong>.15) ein. Man erhält<br />
und mit dem kleinsten Eigenwert aus Gl(<strong>11</strong>.12) folgt<br />
w(x) = c1 sin λx (<strong>11</strong>.25)<br />
w(x) = c1 sin π c<br />
ℓ<br />
. (<strong>11</strong>.26)<br />
Man erkennt, dass die Integrationskonstante c1 unbestimmt bleibt. Aus Gl.(<strong>11</strong>.26) können wir<br />
deshalb nicht die Verschiebungen selbst, sondern nur die Form der Biegelinie ermitteln. Wir<br />
erhalten<br />
w(0) = 0 , (<strong>11</strong>.27)<br />
�<br />
1<br />
w<br />
2 ℓ<br />
�<br />
= c1 , (<strong>11</strong>.28)<br />
w(ℓ) = 0 . (<strong>11</strong>.29)<br />
Die Biegelinie, beschrieben durch Gl.(<strong>11</strong>.25) ist die in Abb.<strong>11</strong>.5 links dargestellte Sinus-Halb-<br />
welle. Sie wird als erste Eigenform oder Knickform bezeichnet.<br />
Abb. <strong>11</strong>.5: Erste und zweite Eigenform <strong>für</strong> den 1.Eulerschen Knickfall
8 <strong>11</strong> Stabilität elastischer Strukturen<br />
Höhere Knicklasten und damit verbundene Knickformen sind weniger von praktischem Inter-<br />
esse. Man müsste sich dann vorstellen, dass man einen idealen Stab ohne jegliche Störung des<br />
Gleichgewichts über die erste Knicklast hinaus bis zur zweiten oder weiteren höheren Knicklast<br />
in Gl.(<strong>11</strong>.23) belasten kann. Nach Erreichen der zweiten Knicklast ergäbe sich mit dem zweiten<br />
Eigenwert (siehe Gl.(<strong>11</strong>.22)) aus Gl.(<strong>11</strong>.25) die zweite Eigenform<br />
Dies liefert<br />
w(x) = c1 sin 2 π x<br />
ℓ<br />
. (<strong>11</strong>.30)<br />
w(0) = 0 , (<strong>11</strong>.31)<br />
�<br />
1<br />
w<br />
4 ℓ<br />
�<br />
�<br />
1<br />
w<br />
2 ℓ<br />
�<br />
�<br />
3<br />
w<br />
4 ℓ<br />
�<br />
Diese zweite Eigenform ist in Abb.<strong>11</strong>.5 rechts dargestellt.<br />
<strong>11</strong>.2.2 Der 2. Eulersche Knickfall<br />
= c1 , (<strong>11</strong>.32)<br />
= 0 , (<strong>11</strong>.33)<br />
= −c1 . (<strong>11</strong>.34)<br />
w(ℓ) = 0 . (<strong>11</strong>.35)<br />
Das Knicken des bereits in Abb.<strong>11</strong>.1 und Abb.<strong>11</strong>.3 dargestellten eingespannten Stabs wird als<br />
2.Eulerscher Knickfall bezeichnet. In Abb.<strong>11</strong>.6 ist er nochmals zur Ermittlung der Schnitt-<br />
größen am verformten System dargestellt.
Knicken als Eigenwertproblem 9<br />
Abb. <strong>11</strong>.6: Auflager- und Schnittreaktionen beim 2.Eulerschen Knickfall<br />
Das Momentengleichgewicht um die Schnittstelle x liefert nun<br />
� M0 = 0 : M(x) = −PK (w0 − w(x)) , (<strong>11</strong>.36)<br />
wobei w0 die unbekannte Verschiebung am freien Ende bezeichnet. Mit Hilfe der Differential-<br />
gleichung der Biegelinie Gl.(6.158) ergibt sich nun<br />
Man erhält somit die Differentialgleichung<br />
oder<br />
w ′′ (x) = PK<br />
E I (w0 − w(x)) . (<strong>11</strong>.37)<br />
w ′′ (x) + PK PK<br />
w(x) =<br />
E I E I w0 . (<strong>11</strong>.38)<br />
wobei wieder abkürzend λ 2 nach Gl.(<strong>11</strong>.6) verwendet wurde.<br />
w ′′ (x) + λ 2 w (x) = λ 2 w0 , (<strong>11</strong>.39)<br />
Gl.(<strong>11</strong>.39) ist eine inhomogene Differentialgleichung zweiter Ordnung. Ihre Lösung lautet<br />
w(x) = c1 sin λx + c1 cosλx + w0 . (<strong>11</strong>.40)
10 <strong>11</strong> Stabilität elastischer Strukturen<br />
Dies kann verifiziert werdenm indem man analog Gl.(<strong>11</strong>.8)–Gl.(<strong>11</strong>.10) diesen Lösungsanstz und<br />
seine mit Gl.(<strong>11</strong>.9) identsche zweite Ableitung in die Differentialgleichung Gl.(<strong>11</strong>.39) einsetzt.<br />
Die geometrischen Randbedingungen <strong>für</strong> den Lösungsansatz Gl.(<strong>11</strong>.40) lauten (siehe Abb.<strong>11</strong>.6)<br />
Außerdem war bereits in Gl.(<strong>11</strong>.36) abkürzend<br />
w(0) = 0 , (<strong>11</strong>.41)<br />
w ′ (0) = 0 . (<strong>11</strong>.42)<br />
w(ℓ) = w0<br />
(<strong>11</strong>.43)<br />
gesetzt worden. Gl.(<strong>11</strong>.40) und ihre mit Gl.(<strong>11</strong>.8) identische erste Ableitung liefern nun mit<br />
Gl.(<strong>11</strong>.41)–Gl.(<strong>11</strong>.43)<br />
Aus Gl.(<strong>11</strong>.45)<br />
Damit liefert Gl.(<strong>11</strong>.44)<br />
und Gl.(<strong>11</strong>.44) ergibt<br />
Diese Gleichung hat die Lösungen<br />
c1 sin 0 + c2 cos 0 + w0 = 0 , (<strong>11</strong>.44)<br />
c1 λ cos 0 − c2 λ sin 0 = 0 , (<strong>11</strong>.45)<br />
c1 sin λℓ + c2 cosλℓ + w0 = w0 . (<strong>11</strong>.46)<br />
c1 = 0 . (<strong>11</strong>.47)<br />
c2 = −w0 (<strong>11</strong>.48)<br />
c2 cosλℓ = 0 . (<strong>11</strong>.49)<br />
c2 = 0 (<strong>11</strong>.50)
Knicken als Eigenwertproblem <strong>11</strong><br />
und<br />
cosλℓ = 0 =⇒ λℓ = 1<br />
π ,<br />
2<br />
� �<br />
3<br />
π , . . .<br />
2<br />
(<strong>11</strong>.51)<br />
Die erste Lösung (c2 = 0) ist die triviale Lösung, denn sie führt mit c1 = 0 (Gl.(<strong>11</strong>.47)) und<br />
w0 = 0 (aus Gl.(<strong>11</strong>.48)) im Lösungsansatz Gl.(<strong>11</strong>.40) zu w(x) = 0 (keine Auslenkung). Dies<br />
entspricht der vertikalen, labilen Gleichgewichtslage in Abb.<strong>11</strong>.3.<br />
Die zweite Lösung (cosλℓ = 0) ist die nicht triviale Lösung, die sich analog <strong>Kapitel</strong> 2.2.1 auch<br />
ergibt, wenn man die Koeffizientendeterminante des homogenen Gleichungssystems aus den<br />
Gl.(<strong>11</strong>.38)–Gl.(<strong>11</strong>.40) Null setzt. Nach Division von Gl.(<strong>11</strong>.45) durch λ und Streichen von w0<br />
auf beiden Seiten von Gl.(<strong>11</strong>.46) lautet diese<br />
D =<br />
�<br />
�<br />
�<br />
�<br />
� 0 1 1 �<br />
�<br />
�<br />
�<br />
�<br />
� 1 0 0 �<br />
�<br />
�<br />
�<br />
�<br />
� sin λℓ cosλℓ 0 �<br />
(<strong>11</strong>.52)<br />
= − cosλℓ (<strong>11</strong>.53)<br />
und somit folgt aus D = 0 wie in Gl.(<strong>11</strong>.51) die Lösung cosλℓ = 0 .<br />
Die nicht triviale Lösung Gl.(<strong>11</strong>.51) liefert die Eigenwerte<br />
λ = 1 π<br />
2 ℓ ,<br />
und damit über Gl.(<strong>11</strong>.6) die Knicklasten PK<br />
PK =<br />
E I π2<br />
2 ,<br />
(2 ℓ)<br />
�<br />
3 π<br />
2 ℓ<br />
�<br />
E I π 2<br />
� 2<br />
3 ℓ� 2<br />
, . . .<br />
�<br />
, . . .<br />
�<br />
(<strong>11</strong>.54)<br />
, (<strong>11</strong>.55)<br />
<strong>für</strong> die eine zweite, ausgelenkte Gleichgewichtslage möglich ist. Das Stabilitätskriterium <strong>für</strong> den<br />
2.Eulerschen Knickfall lautet mit der kleinsten Knicklast aus Gl.(<strong>11</strong>.55)<br />
P <<br />
E I π2<br />
(2 ℓ) 2<br />
. (<strong>11</strong>.56)
12 <strong>11</strong> Stabilität elastischer Strukturen<br />
Die Gleichung der Biegelinie <strong>für</strong> den ausgeknickten Stab ergibt sich aus dem Lösungsansatz<br />
Gl.(<strong>11</strong>.40) nach Einsetzen der in Gl.(<strong>11</strong>.47) und Gl.(<strong>11</strong>.48) ermittelten Integrationshilfen als<br />
w(x) = −w0 cosλx + w0<br />
(<strong>11</strong>.57)<br />
= w0 (1 − cosλx) . (<strong>11</strong>.58)<br />
Die Verschiebung w0 des freien Stabendes bleibt unbestimmt. Für den kleinsten Eigenwert in<br />
Gl.(<strong>11</strong>.54) erhält man aus Gl.(<strong>11</strong>.57) die erste Eigenform<br />
Dies liefert<br />
w(x) = w0<br />
�<br />
1 − cos<br />
π x<br />
�<br />
2 ℓ<br />
. (<strong>11</strong>.59)<br />
w(0) = 0 . (<strong>11</strong>.60)<br />
w(ℓ) = w0 . (<strong>11</strong>.61)<br />
Der einseitig eingespannte Stab knickt also in Form einer Cosinus-Halbwelle aus. Die Knickform<br />
ist in Abb.<strong>11</strong>.7 links dargestellt.<br />
Abb. <strong>11</strong>.7: Erste und zweite Eigenform <strong>für</strong> dem 2.Eulerschen Knickfall<br />
Mit dem zweiten Eigenwert in Gl.(<strong>11</strong>.54) ergibt sich aus Gl.(<strong>11</strong>.57) die zweite Eigenform<br />
w(x) = w0<br />
�<br />
1 − cos<br />
�<br />
3 π x<br />
2 ℓ<br />
. (<strong>11</strong>.62)
Knicken als Eigenwertproblem 13<br />
Dies liefert<br />
w(0) = 0 , (<strong>11</strong>.63)<br />
�<br />
1<br />
w<br />
3 ℓ<br />
�<br />
�<br />
2<br />
w<br />
3 ℓ<br />
�<br />
Diese zweite Eigenform ist in Abb.<strong>11</strong>.7 rechts dargestellt.<br />
<strong>11</strong>.2.3 Der 3. Eulersche Knickfall<br />
= w0 , (<strong>11</strong>.64)<br />
= 2 w0 , (<strong>11</strong>.65)<br />
w(ℓ) = w0 . (<strong>11</strong>.66)<br />
In Abb.<strong>11</strong>.8 ist ein Druckstab dargestellt, der an einem Ende eingespannt und am anderen<br />
Ende verschieblich gelenkig gelagert ist. Das System ist einfach statisch unbestimmt.<br />
Abb. <strong>11</strong>.8: Auflager- und Schnittreaktionen beim 3.Eulerschen Knickfall<br />
Das Momentengleichgewicht am verformten System um die Schnittstelle x liefert<br />
� M0 = 0 : M(x) = PK w(x) − B x . (<strong>11</strong>.67)
14 <strong>11</strong> Stabilität elastischer Strukturen<br />
Die Differentialgleichung der Biegelinie lautet mit Gl.(6.158)<br />
also<br />
Mit der Abkürzung Gl.(<strong>11</strong>.6) folgt schließlich<br />
w ′′ (x) = − PK B<br />
w(x) − x , (<strong>11</strong>.68)<br />
E I E I<br />
w ′′ (x) + PK B<br />
w(x) = − x . (<strong>11</strong>.69)<br />
E I E I<br />
w ′′ (x) + λ 2 w(x) = − B<br />
x . (<strong>11</strong>.70)<br />
E I<br />
Die Lösung dieser inhomogenen Differentialgleichung zweiter Ordnung lautet<br />
w(x) = c1 sin λx + c2 cosλx − B<br />
E I<br />
1<br />
x . (<strong>11</strong>.71)<br />
λ2 Dies kann wiederum leicht bewiesen werden, indem man diesen Lösungsansatz und seine mit<br />
Gl.(<strong>11</strong>.9) identische zweite Ableitung in die Differentialgleichung Gl.(<strong>11</strong>.70) einsetzt.<br />
Die geometrischen Randbedingungen <strong>für</strong> den Lösungsansatz Gl.(<strong>11</strong>.71) lauten (siehe Abb.<strong>11</strong>.8)<br />
Gl.(<strong>11</strong>.71) und ihre erste Ableitung<br />
liefern nun mit den Gl.(<strong>11</strong>.72)–Gl.(<strong>11</strong>.74)<br />
w(0) = 0 , (<strong>11</strong>.72)<br />
w(ℓ) = 0 , (<strong>11</strong>.73)<br />
w ′ (ℓ) = 0 . (<strong>11</strong>.74)<br />
w ′ (x) = c1 λ cosλx − c2 λ sin λx − B<br />
E I<br />
c1 sin λℓ + c2 cosλℓ − B<br />
E I<br />
c1 λ cosλℓ − c2 λ sin λℓ − B<br />
E I<br />
1<br />
λ 2<br />
(<strong>11</strong>.75)<br />
c1 sin 0 + c2 cos 0 = 0 , (<strong>11</strong>.76)<br />
1<br />
ℓ = 0 , (<strong>11</strong>.77)<br />
λ2 1<br />
= 0 . (<strong>11</strong>.78)<br />
λ2
Knicken als Eigenwertproblem 15<br />
Aus Gl.(<strong>11</strong>.76) folgt<br />
Damit liefert Gl.(<strong>11</strong>.78)<br />
B<br />
E I<br />
Aus Gl.(<strong>11</strong>.77) ergibt sich mit Gl.(<strong>11</strong>.79)–Gl.(<strong>11</strong>.80)<br />
also<br />
Diese Gleichung hat die Lösungen<br />
und<br />
c2 = 0 . (<strong>11</strong>.79)<br />
1<br />
λ 2 = c1 λ cosλℓ (<strong>11</strong>.80)<br />
c1 sin λℓ − c1 λ ℓ cosλℓ = 0 , (<strong>11</strong>.81)<br />
c1 (sin λℓ − λ ℓ cosλℓ) = 0 . (<strong>11</strong>.82)<br />
c1 = 0 (<strong>11</strong>.83)<br />
sin λℓ − λ ℓ cosλℓ = 0 . (<strong>11</strong>.84)<br />
Die erste Lösung (c1 = 0) ist die triviale Lösung, denn sie führt mit c2 = 0 (Gl.(<strong>11</strong>.79) und<br />
B = 0 (aus Gl.(<strong>11</strong>.80)) im Lösungsansatz Gl.(<strong>11</strong>.71) zu w(x) = 0 (keine Auslenkung). Dies<br />
entspricht einer vertikalen, labilen Gleichgewichtslage in Abb.<strong>11</strong>.8.<br />
Die zweite Lösung (Gl.(<strong>11</strong>.84)) ist die nichttriviale Lösung, die sich wie in <strong>Kapitel</strong> 2.2.1 darge-<br />
stellt auch ergibt, wenn man die Koeffizientendeterminante des homogenen Gleichungssystems
16 <strong>11</strong> Stabilität elastischer Strukturen<br />
aus den Gl.(<strong>11</strong>.76)–Gl.(<strong>11</strong>.78) Null setzt. Diese lautet<br />
D =<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
= −1<br />
=<br />
0 1 0<br />
sin λℓ cosλℓ − ℓ<br />
E I λ 2<br />
λ cosλℓ −λ sin λℓ − 1<br />
E I λ 2<br />
�<br />
− sin λℓ<br />
1<br />
+ λ cos λℓ<br />
E I λ2 �<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
�<br />
ℓ<br />
E I λ2 �<br />
(<strong>11</strong>.85)<br />
(<strong>11</strong>.86)<br />
1<br />
(sin λℓ − λ cosλℓ) , (<strong>11</strong>.87)<br />
E I λ2 und somit folgt aus D = 0 wie in Gl.(<strong>11</strong>.84) sinλℓ − λ cosλℓ = 0.<br />
Die nichttriviale Lösung Gl.(formel<strong>11</strong>.84) liefert<br />
Diese Gleichung wird in Abb.<strong>11</strong>.9 graphisch ausgewertet.<br />
Man erhält als kleinste Lösung<br />
und somit als kleinsten Eigenwert<br />
und über Gl.(<strong>11</strong>.6) als kleinste Knicklast<br />
PK =<br />
λ ℓ = tan λℓ . (<strong>11</strong>.88)<br />
λ ℓ = 4, 4933 (<strong>11</strong>.89)<br />
λ =<br />
4, 4933<br />
ℓ<br />
E I (4, 4933)2<br />
ℓ 2 ≈<br />
Das Stabilitätskriterium <strong>für</strong> den 3.Eulerschen Knickfall lautet also<br />
p <<br />
E I π2<br />
(0, 7 ℓ) 2<br />
(<strong>11</strong>.90)<br />
E I π2<br />
(0, 7 ℓ) 2 . (<strong>11</strong>.91)<br />
. (<strong>11</strong>.92)
Knicken als Eigenwertproblem 17<br />
Abb. <strong>11</strong>.9: Zur Ermittlung der Eigenwerte des 3.Eulerschen Knickfalls<br />
Setzt man die in Gl.(<strong>11</strong>.79) und Gl.(<strong>11</strong>.80) ermittelten Integrationskonstanten in den Lösungs-<br />
ansatz Gl.(<strong>11</strong>.71) ein, so erhält man die Biegelinie <strong>für</strong> den ausgeknickten Stab in der Form<br />
Dies liefert mit Gl.(<strong>11</strong>.88)<br />
w(x) = c1 sin λx − c1 λ x cosλℓ (<strong>11</strong>.93)<br />
= c1 (sin λx − λ x cos λℓ) . (<strong>11</strong>.94)<br />
w(0) = 0 ,
18 <strong>11</strong> Stabilität elastischer Strukturen<br />
w(ℓ) = c1 (sin λℓ − λ ℓ cosλℓ) (<strong>11</strong>.95)<br />
= c1 cosλℓ (tanλℓ − λ ℓ) = 0 (<strong>11</strong>.96)<br />
Eine Auswertung der Gl.(<strong>11</strong>.94) <strong>für</strong> den kleinsten Eigenwert in Gl.(<strong>11</strong>.89) liefert<br />
w<br />
w<br />
� �<br />
ℓ<br />
4<br />
� �<br />
ℓ<br />
2<br />
�<br />
3<br />
w<br />
3 ℓ<br />
�<br />
Die erste Knickform ist in Abb.<strong>11</strong>.10 dargestellt.<br />
= 1, 15 c1 , (<strong>11</strong>.97)<br />
= 1, 27 c1 , (<strong>11</strong>.98)<br />
= 0, 51 c1 . (<strong>11</strong>.99)<br />
Abb. <strong>11</strong>.10: Erste Eigenform <strong>für</strong> den 3.Eulerschen Knickfall<br />
<strong>11</strong>.2.4 Der 4. Eulersche Knickfall<br />
In Abb.<strong>11</strong>.<strong>11</strong> ist ein zweiseitig eingespannter Druckstab dargestellt, an dessem einem Ende<br />
die Längsverschiebung in axialer Richtung infolge einer Kraft P durch eine geeignete Führung<br />
zugelassen wird. Das System ist zweifach statisch unbestimmt.
Knicken als Eigenwertproblem 19<br />
Abb. <strong>11</strong>.<strong>11</strong>: Auflager- und Schnittreaktionen beim 4.Eulerschen Knickfall<br />
Die Auflagerreaktionen wurden <strong>für</strong> den Fall einer symmetrischen verformten Konfiguration ein-<br />
gezeichnet, da man zeigen kann, dass die Knicklast der ersten symmetrischen Knickfigur kleiner<br />
ist als die der ersten unsymmetrischen Knickfigur.<br />
Das Momentengleichgewicht am verformten System um die Schnittstelle x ergibt<br />
� M0 = 0 : M(x) = PK w(x) − MB (<strong>11</strong>.100)<br />
Damit lautet die Differentialgleichung der Biegelinie<br />
also<br />
oder mit der Abkürzung Gl.(<strong>11</strong>.6)<br />
w ′′ (x) = − PK MB<br />
w(x) +<br />
E I E I<br />
w ′′ (x) + PK MB<br />
w(x) =<br />
E I E I<br />
w ′′ (x) + λ 2 w(x) = MB<br />
E I<br />
(<strong>11</strong>.101)<br />
(<strong>11</strong>.102)<br />
. (<strong>11</strong>.103)
20 <strong>11</strong> Stabilität elastischer Strukturen<br />
Die Lösung dieser inhomogenen Gleichung ist<br />
w(x) = c1 sin λx + c2 cosλx + MB<br />
E I<br />
1<br />
λ 2<br />
(<strong>11</strong>.104)<br />
Der Beweis erfolgt wiederum durch Einsetzen von Gl.,(<strong>11</strong>.104) und der mit Gl.(<strong>11</strong>.9) identi-<br />
schen zweiten Ableitung in die Differentialgleichung Gl.(<strong>11</strong>.103).<br />
Die geometrischen Randbedingungen <strong>für</strong> den Lösungsansatz Gl.(<strong>11</strong>.104) lauten<br />
w(0) = 0 , (<strong>11</strong>.105)<br />
w ′ (0) = 0 , (<strong>11</strong>.106)<br />
w ′<br />
�<br />
1<br />
2 ℓ<br />
�<br />
= 0 . (<strong>11</strong>.107)<br />
Einsetzen in den Lösungsansatz Gl.(<strong>11</strong>.104) und seine mit Gl.(<strong>11</strong>.8) identische erste Ableitung<br />
liefern nun mit Gl.(<strong>11</strong>.104)–Gl.(<strong>11</strong>.106)<br />
Aus Gl.(<strong>11</strong>.108) folgt<br />
Damit liefert Gl.(<strong>11</strong>.109)<br />
c1 sin 0 + c2 cos 0 + MB<br />
E I<br />
1<br />
= 0 , (<strong>11</strong>.108)<br />
λ2 λ c1 cos 0 + λ, c2 sin 0 = 0 , (<strong>11</strong>.109)<br />
λ c1 cos 1<br />
2 λℓ + λ c2 sin 1<br />
λℓ = 0 . (<strong>11</strong>.<strong>11</strong>0)<br />
2<br />
c2 = − MB<br />
E I<br />
Schließlich ergibt sich aus Gl.(<strong>11</strong>.<strong>11</strong>0)–Gl.(<strong>11</strong>.<strong>11</strong>2)<br />
Diese Gleichung hat die Lösungen<br />
MB<br />
E I<br />
1<br />
λ<br />
1<br />
λ 2<br />
. (<strong>11</strong>.<strong>11</strong>1)<br />
c1 = 0 . (<strong>11</strong>.<strong>11</strong>2)<br />
1<br />
sin λ ℓ = 0 . (<strong>11</strong>.<strong>11</strong>3)<br />
2<br />
MB = 0 (<strong>11</strong>.<strong>11</strong>4)
Knicken als Eigenwertproblem 21<br />
und<br />
sin 1<br />
λℓ = 0 . (<strong>11</strong>.<strong>11</strong>5)<br />
2<br />
Die erste Lösung (MB = 0) ist die triviale Lösung, denn sie führt mit c2 = 0 (Gl.(<strong>11</strong>.<strong>11</strong>1))<br />
und Gl.(<strong>11</strong>.<strong>11</strong>2) im Lösungsansatz Gl.(<strong>11</strong>.104) zu w(x) = 0 (keine Auslenkung), also zu der<br />
vertikalen, labilen Gleichgewichtslage in Abb.<strong>11</strong>.<strong>11</strong>.<br />
Die zweite Lösung (Gl.(<strong>11</strong>.<strong>11</strong>5)) ist die nicht triviale Lösung. Analog der in <strong>Kapitel</strong> 2.2.1 dar-<br />
gestellten Vorgehensweise erhält man sie auch, wenn man die Koeffizientendeterminante des<br />
homogenen Gleichungssystems aus den Gl.(<strong>11</strong>.108)–Gl.(<strong>11</strong>.<strong>11</strong>0) Null setzt.<br />
Diese lautet<br />
D =<br />
und somit folgt aus D = 0 wie in Gl.(<strong>11</strong>.<strong>11</strong>5)<br />
Die nicht triviale Lösung Gl.(<strong>11</strong>.<strong>11</strong>5) liefert<br />
oder<br />
�<br />
�<br />
�<br />
1<br />
�<br />
0 1<br />
�<br />
E I λ<br />
�<br />
�<br />
�<br />
�<br />
�<br />
2<br />
�<br />
�<br />
�<br />
�<br />
�<br />
λ 0 0 �<br />
�<br />
λ ℓ λ ℓ �<br />
λ cos λ sin 0<br />
�<br />
�<br />
2 2<br />
sin 1<br />
λℓ = 0 .<br />
2<br />
(<strong>11</strong>.<strong>11</strong>6)<br />
λ ℓ = 2 π , (4 π , . . . ) (<strong>11</strong>.<strong>11</strong>7)<br />
λ =<br />
2 π<br />
ℓ<br />
,<br />
� 4 π<br />
ℓ<br />
�<br />
, . . .<br />
und damit ausgezeichnete Werte <strong>für</strong> die Knicklast PK (siehe Gl.(<strong>11</strong>.6))<br />
PK =<br />
E I π2<br />
�<br />
1<br />
2 ℓ� 2 ,<br />
�<br />
E I π 2<br />
� 1<br />
4 ℓ� 2<br />
, . . .<br />
<strong>für</strong> die eine zweite ausgelenkte Gleichgewichtslage möglich ist.<br />
�<br />
(<strong>11</strong>.<strong>11</strong>8)<br />
, (<strong>11</strong>.<strong>11</strong>9)
22 <strong>11</strong> Stabilität elastischer Strukturen<br />
Das Stabilitätskriterium <strong>für</strong> den 4.Eulerschen Knickfall lautet also mit der kleinsten kritischen<br />
Last aus Gl.(<strong>11</strong>.<strong>11</strong>9)<br />
P <<br />
E I π2<br />
� 1<br />
2 ℓ� 2 . (<strong>11</strong>.120)<br />
Mit den in Gl.(<strong>11</strong>.<strong>11</strong>1) und Gl.(<strong>11</strong>.<strong>11</strong>2) bestimmten Integrationskonstanten erhält man <strong>für</strong> die<br />
Biegelinie des ausgeknickten Stabs aus Gl.(<strong>11</strong>.104)<br />
Dies liefert<br />
und <strong>für</strong> den kleinsten Eigenwert (λ ℓ = 2 π) in Gl.(<strong>11</strong>.<strong>11</strong>7)<br />
w<br />
w<br />
� �<br />
ℓ<br />
4<br />
� �<br />
ℓ<br />
2<br />
�<br />
3<br />
w<br />
4 ℓ<br />
�<br />
= c2<br />
= c2<br />
= c2<br />
�<br />
cos 1<br />
�<br />
λℓ − 1<br />
4<br />
�<br />
cos 1<br />
�<br />
λℓ − 1<br />
2<br />
�<br />
cos 3<br />
�<br />
λℓ − 1<br />
4<br />
w(x) = c2 (cosλx − 1) . (<strong>11</strong>.121)<br />
w(0) = 0 (<strong>11</strong>.122)<br />
= c2<br />
�<br />
cos 1<br />
�<br />
π − 1<br />
2<br />
= − c2 , (<strong>11</strong>.123)<br />
= c2 (cosπ − 1) = − 2 c2 , (<strong>11</strong>.124)<br />
= c2<br />
�<br />
cos 3<br />
�<br />
π − 1<br />
2<br />
= − c2 , (<strong>11</strong>.125)<br />
w(ℓ) = c2 (cos λℓ − 1) = c2 (cos 2 π − 1) = 0 . (<strong>11</strong>.126)<br />
Die erste Knickform ist in Abb.<strong>11</strong>.12 links dargestellt. In ähnlicher Weise erhält man mit<br />
dem zweiten Eigenwert (λ ℓ = 4 π) in Gl.(<strong>11</strong>.<strong>11</strong>7) aus der Biegelinie Gl.(<strong>11</strong>.121) die zweite<br />
symmetrische Eigenform, die in Abb.<strong>11</strong>.12 rechts dargestellt ist.
Knicken als Eigenwertproblem 23<br />
Abb. <strong>11</strong>.12: Erste und zweite symmetrische Eigenform <strong>für</strong> den 4.Eulerschen Knickfall