KEM Konstruktion Connected mobile Machines & Mobility (CMM) 2020
Trendthemen: Kongressmesse CMM, Connected Mobility, Cludtechnologie, autonomes Fahren, Testen in the Loop, Antriebe und Komponenten, Entwicklungstools und Produktion; KEM Perspektiven: Elektromobilität und Leichtbau; KEM Porträt: Nils Martens und Dr. Manfred Stefener, Freudenberg Sealing Technologies
Trendthemen: Kongressmesse CMM, Connected Mobility, Cludtechnologie, autonomes Fahren, Testen in the Loop, Antriebe und Komponenten, Entwicklungstools und Produktion; KEM Perspektiven: Elektromobilität und Leichtbau; KEM Porträt: Nils Martens und Dr. Manfred Stefener, Freudenberg Sealing Technologies

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
AUTOMATISIERUNG & SYSTEMMANAGEMENT<br />
TESTEN IN THE LOOP<br />
Lücke zwischen realem Fahrversuch und Tests auf konventionellen HiL-Prüfständen geschlossen<br />
Vehicle in the Loop<br />
macht komplexe Tests noch einfacher<br />
Ein hochdynamischer Vehicle-in-the-Loop-Prüfstand hat sich bei der Technischen Universität Berlin<br />
als hocheffiziente Testumgebung zur Analyse von elektrifizierten und hochautomatisierten Fahrzeugen<br />
bewährt. Der AVL Drivingcube schließt dabei die Lücke zwischen realem Fahrversuch und Tests auf<br />
konventionellen HiL-Prüfständen. Ein weiteres Plus ist, dass die Mitarbeiter hinsichtlich Kompetenzentwicklung<br />
und Schaffung einer einheitlichen Sprachbasis von der Prüfstandsumgebung profitieren.<br />
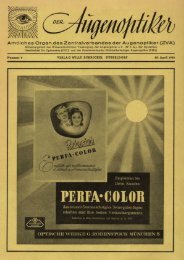
Fast wie in der Realität: Forscher der TU Berlin<br />
können mit ihrem Vehicle-in-the-Loop-Prüfstand<br />
neben klassischen Antriebssystemen auch das<br />
Antriebs- und Energiemanagement von E-Fahrzeugen<br />
sowie autonome Fahrfunktionen<br />
untersuchen<br />
Bild: TU Berlin/AVL<br />
Der Fachbereich Kraftfahrzeuge der Technischen Universität Berlin<br />
unter der Leitung von Prof. Dr.-Ing. Steffen Müller plante im<br />
Jahr 2016 die Anschaffung eines hochdynamischen Vehicle-in-the-<br />
Loop-Prüfstands (ViL-Prüfstand) zur Untersuchung, Analyse, Entwicklung<br />
und Forschung an Fahrzeugführungsregel-, Antriebs-, Fahrwerkregel-<br />
und Energiemanagementsystemen von Fahrzeugen. Der<br />
Prüfstand stellt mittlerweile das Herz des KFZB-Versuchszentrums<br />
für Kraftfahrzeugforschung der TU Berlin am Campus Wedding dar.<br />
Das Prüfstandskonzept baut auf einen 4WD-Antriebsstrangprüfstand<br />
mit Gesamtfahrzeug auf. Zur Sicherstellung realer Einsatzbedingungen<br />
– bis in den fahrdynamischen Grenzbereich – kommen<br />
hochdynamische Synchronmaschinen zum Einsatz. Lenkeingriffe<br />
werden durch die mechanische Entkopplung des Lenkgestänges<br />
am Radträger und das Anbringen eines linearen Lenkaktuators ermöglicht.<br />
Über Sensorschnittstellen wird das Testfahrzeug an die virtuelle<br />
Umgebung angebunden. Dadurch wird sichergestellt, dass<br />
die Steuergeräte im Fahrzeug mit allen notwendigen Umgebungs-<br />
und Fahrdynamikgrößen versorgt werden.<br />
Für die effiziente Entwicklung und Bewertung<br />
von innovativen Betriebsstrategien an<br />
Hybrid- und Elektrofahrzeugen kommt ein<br />
Batteriesimulator zum Einsatz.<br />
Praxistest im Bereich<br />
Umfelderkennung<br />
Die Inbetriebnahme erfolgte im Frühjahr<br />
2018. Direkt im Anschluss ergab sich die<br />
Möglichkeit, in einer Kooperation mit dem<br />
Fraunhofer-Institut für offene Kommunikationssysteme (Fokus) in<br />
Berlin, den Prüfstand im Forschungsprojekt RobustSense einzusetzen.<br />
Aufgabe war die Integration und Validierung einer neuen Plattform<br />
für robuste und zuverlässige Umfelderkennung für Fahrer -<br />
assistenzsysteme und hochautomatisiertes Fahren auch bei widrigen<br />
Wetterbedingungen.<br />
Zum Funktionsnachweis und zur Demonstration der Projektergebnisse<br />
rüsteten die Ingenieure ein Forschungsfahrzeug mit einer<br />
robusten Systemarchitektur für die beiden Fahrfunktionen<br />
• Adaptive Längsregelung (ACC – Adaptive Cruise Control) und<br />
• Spurhalteassistent (LKA – Lane Keep Assist)<br />
aus. Zur Umfelderkennung wurden neben der serienmäßigen<br />
Sensorik auch zusätzliche Referenzsensoren (Lidar und Kamera)<br />
verbaut.<br />
Reale Fahrversuche liefern Datenbasis<br />
In realen Fahrversuchen wurden zuvor unter winterlichen Bedingungen<br />
auf Überlandstraßen und Autobahnen die für die Umfelderkennung<br />
und Fahrdynamik kritischen Szenarien identifiziert und anschließend<br />
für den AVL Drivingcube virtuell abgebildet.<br />
Entsprechend der Validierungsmethode von RobustSense ersetzten<br />
die Projektbeteiligten die realen Fahrzeugsensoren am Prüfstand<br />
22 K|E|M <strong>Konstruktion</strong> Sonderausgabe <strong>Connected</strong> <strong>mobile</strong> <strong>Machines</strong> & <strong>Mobility</strong> (<strong>CMM</strong>) <strong>2020</strong>