

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einrichten und Betrieb 5. Arbeitsbereich<br />
HINWEIS<br />
�<br />
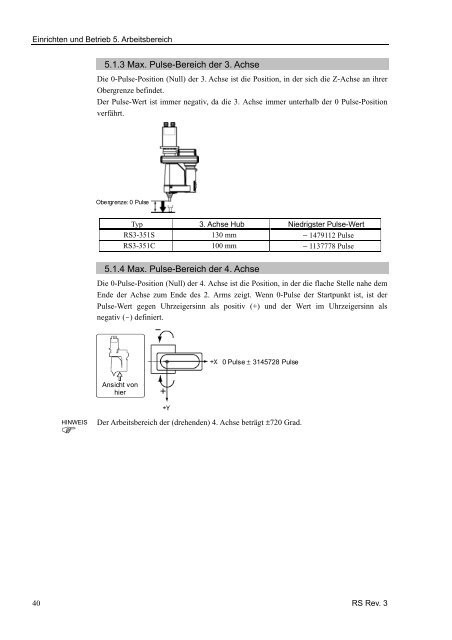
5.1.3 Max. Pulse-Bereich der 3. Achse<br />
Die 0-Pulse-Position (Null) der 3. Achse ist die Position, in der sich die Z-Achse an ihrer<br />
Obergrenze befindet.<br />
Der Pulse-Wert ist immer negativ, da die 3. Achse immer unterhalb der 0 Pulse-Position<br />
verfährt.<br />
Obergrenze: 0 Pulse<br />
Typ 3. Achse Hub Niedrigster Pulse-Wert<br />
<strong>RS</strong>3-351S 130 mm − 1479112 Pulse<br />
<strong>RS</strong>3-351C 100 mm − 1137778 Pulse<br />
5.1.4 Max. Pulse-Bereich der 4. Achse<br />
Die 0-Pulse-Position (Null) der 4. Achse ist die Position, in der die flache Stelle nahe dem<br />
Ende der Achse zum Ende des 2. Arms zeigt. Wenn 0-Pulse der Startpunkt ist, ist der<br />
Pulse-Wert gegen Uhrzeigersinn als positiv (+) und der Wert im Uhrzeigersinn als<br />
negativ (-) definiert.<br />
Ansicht von<br />
hier<br />
0Pulse ± 3145728 Pulse<br />
Der Arbeitsbereich der (drehenden) 4. Achse beträgt ±720 Grad.<br />
40 <strong>RS</strong> Rev. 3













