

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
VO<strong>RS</strong>ICHT<br />
Einrichten und Betrieb 4. Einstellung des Greifers<br />
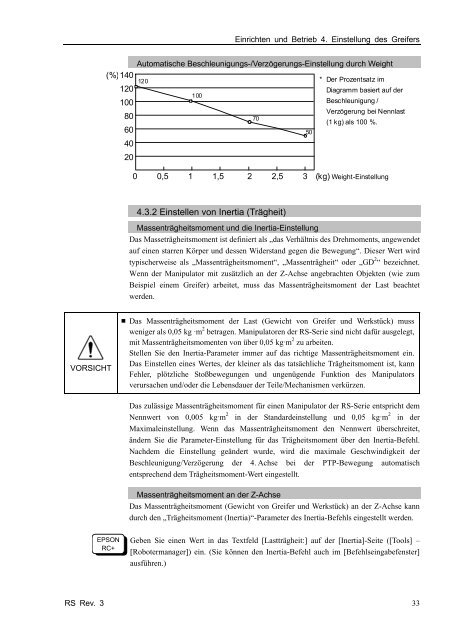
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch Weight<br />
(%) 140<br />
120<br />
100<br />
120<br />
100<br />
* Der Prozentsatz im<br />
Diagramm basiert auf der<br />
Beschleunigung /<br />
80<br />
60<br />
40<br />
20<br />
70<br />
50<br />
Verzögerung bei Nennlast<br />
(1 kg) als 100 %.<br />
EPSON<br />
RC+<br />
0 0,5 1 1,5 2 2,5 3 (kg) Weight-Einstellung<br />
4.3.2 Einstellen von Inertia (Trägheit)<br />
Massenträgheitsmoment und die Inertia-Einstellung<br />
<strong>Das</strong> Masseträgheitsmoment ist definiert als „das Verhältnis des Drehmoments, angewendet<br />
auf einen starren Körper und dessen Widerstand gegen die Bewegung“. Dieser Wert wird<br />
typischerweise als „Massenträgheitsmoment“, „Massenträgheit“ oder „GD 2 “ be<strong>zeichnet</strong>.<br />
Wenn der <strong>Manipulator</strong> mit zusätzlich an der Z-Achse angebrachten Objekten (wie zum<br />
Beispiel einem Greifer) arbeitet, muss das Massenträgheitsmoment der Last beachtet<br />
werden.<br />
■ <strong>Das</strong> Massenträgheitsmoment der Last (Gewicht von Greifer und Werkstück) muss<br />
weniger als 0,05 kg �m 2 betragen. <strong>Manipulator</strong>en der <strong>RS</strong>-<strong>Serie</strong> sind nicht dafür <strong>aus</strong>gelegt,<br />
mit Massenträgheitsmomenten von über 0,05 kg�m 2 zu arbeiten.<br />
Stellen Sie den Inertia-Parameter immer auf das richtige Massenträgheitsmoment ein.<br />
<strong>Das</strong> Einstellen eines Wertes, der kleiner als das tatsächliche Trägheitsmoment ist, kann<br />
Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des <strong>Manipulator</strong>s<br />
verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.<br />
<strong>Das</strong> zulässige Massenträgheitsmoment für einen <strong>Manipulator</strong> der <strong>RS</strong>-<strong>Serie</strong> entspricht dem<br />
Nennwert von 0,005 kg�m 2 in der Standardeinstellung und 0,05 kg�m 2 in der<br />
Maximaleinstellung. Wenn das Massenträgheitsmoment den Nennwert überschreitet,<br />
ändern Sie die Parameter-Einstellung für das Trägheitsmoment über den Inertia-Befehl.<br />
Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der<br />
Beschleunigung/Verzögerung der 4. Achse bei der PTP-Bewegung automatisch<br />
entsprechend dem Trägheitsmoment-Wert eingestellt.<br />
Massenträgheitsmoment an der Z-Achse<br />
<strong>Das</strong> Massenträgheitsmoment (Gewicht von Greifer und Werkstück) an der Z-Achse kann<br />
durch den „Trägheitsmoment (Inertia)“-Parameter des Inertia-Befehls eingestellt werden.<br />
Geben Sie einen Wert in das Textfeld [Lastträgheit:] auf der [Inertia]-Seite ([Tools] –<br />
[<strong>Roboter</strong>manager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]<br />
<strong>aus</strong>führen.)<br />
<strong>RS</strong> Rev. 3 33













