

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Einrichten und Betrieb 3. Umgebungen und Installation<br />
3.6 Anschluss der Kabel<br />
WARNUNG<br />
VO<strong>RS</strong>ICHT<br />
Kabelanschlüsse<br />
■ Um die Spannungsversorgung des <strong>Roboter</strong>systems zu unterbrechen, ziehen Sie den<br />
Netzstecker <strong>aus</strong> der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete<br />
Netzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung<br />
an.<br />
■ Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die<br />
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von<br />
der Spannungsversorgung.<br />
Aust<strong>aus</strong>charbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu<br />
einem elektrischen Schlag und/oder einer Fehlfunktion des <strong>Roboter</strong>systems führen.<br />
■ Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen mechanischen<br />
Beanspruchungen <strong>aus</strong>. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen<br />
oder ziehen Sie die Kabel nicht gewaltsam.) Eine unnötige mechanische Beanspruchung<br />
der Kabel kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung<br />
und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der<br />
Stromversorgung oder Kontaktfehler sind sehr gefährlich und können zu einem<br />
elektrischen Schlag und/oder einer Fehlfunktion des <strong>Roboter</strong>systems führen.<br />
■ Wenn Sie den <strong>Manipulator</strong> mit der Steuerung verbinden, vergewissern Sie sich, dass die<br />
<strong>Serie</strong>nnummern auf jedem Gerät zusammenpassen. Eine unsachgemäße Verbindung<br />
zwischen der Steuerung und dem <strong>Manipulator</strong> kann nicht nur eine unzureichende<br />
Funktion des <strong>Roboter</strong>systems verursachen, sondern auch zu ernsten<br />
Sicherheitsproblemen führen. Die Anschlussmethode variiert entsprechend der<br />
verwendeten Software. Nähere Informationen zum Anschluss finden Sie im<br />
Steuerungshandbuch.<br />
Wenn ein <strong>Manipulator</strong> der G-<strong>Serie</strong>, der E2-<strong>Serie</strong> oder der <strong>RS</strong>-<strong>Serie</strong> an die Steuerung der<br />
PS-<strong>Serie</strong> (ProSix) angeschlossen wird, kann dies zu einem Ausfall des <strong>Manipulator</strong>s<br />
führen.<br />
Wenn es sich bei dem <strong>Manipulator</strong> um ein Reinraum-Modell handelt, müssen Sie ihn<br />
zusammen mit einem Abluftsystem verwenden.<br />
Nähere Informationen finden Sie im Kapitel Einrichten und Betrieb: 2.4 Spezifikationen.<br />
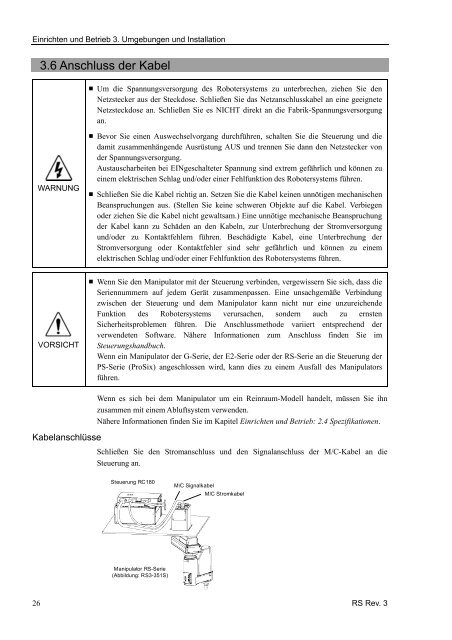
Schließen Sie den Stromanschluss und den Signalanschluss der M/C-Kabel an die<br />
Steuerung an.<br />
Steuerung RC180<br />
<strong>Manipulator</strong> <strong>RS</strong>-<strong>Serie</strong><br />
(Abbildung: <strong>RS</strong>3-351S)<br />
M/C Signalkabel<br />
M/C Stromkabel<br />
26 <strong>RS</strong> Rev. 3













