

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einrichten und Betrieb 3. Umgebungen und Installation<br />
3.3 Montageabmessungen<br />
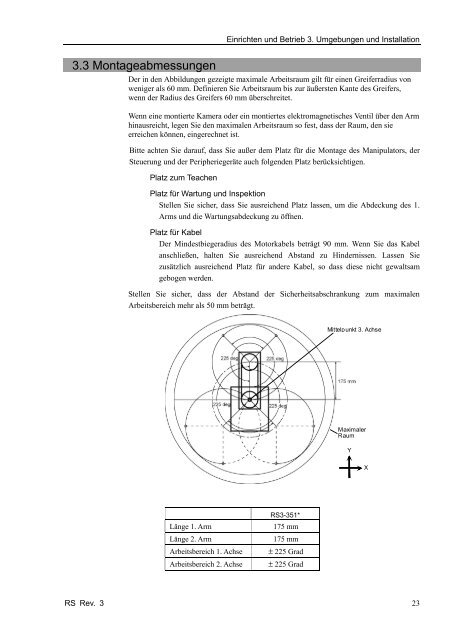
Der in den Abbildungen gezeigte maximale Arbeitsraum gilt für einen Greiferradius von<br />
weniger als 60 mm. Definieren Sie Arbeitsraum bis zur äußersten Kante des Greifers,<br />
wenn der Radius des Greifers 60 mm überschreitet.<br />
Wenn eine montierte Kamera oder ein montiertes elektromagnetisches Ventil über den Arm<br />
hin<strong>aus</strong>reicht, legen Sie den maximalen Arbeitsraum so fest, dass der Raum, den sie<br />
erreichen können, eingerechnet ist.<br />
Bitte achten Sie darauf, dass Sie außer dem Platz für die Montage des <strong>Manipulator</strong>s, der<br />
Steuerung und der Peripheriegeräte auch folgenden Platz berücksichtigen.<br />
Platz zum Teachen<br />
Platz für Wartung und Inspektion<br />
Stellen Sie sicher, dass Sie <strong>aus</strong>reichend Platz lassen, um die Abdeckung des 1.<br />
Arms und die Wartungsabdeckung zu öffnen.<br />
Platz für Kabel<br />
Der Mindestbiegeradius des Motorkabels beträgt 90 mm. Wenn Sie das Kabel<br />
anschließen, halten Sie <strong>aus</strong>reichend Abstand zu Hindernissen. Lassen Sie<br />
zusätzlich <strong>aus</strong>reichend Platz für andere Kabel, so dass diese nicht gewaltsam<br />
gebogen werden.<br />
Stellen Sie sicher, dass der Abstand der Sicherheitsabschrankung zum maximalen<br />
Arbeitsbereich mehr als 50 mm beträgt.<br />
Länge 1. Arm<br />
<strong>RS</strong>3-351*<br />
175 mm<br />
Länge 2. Arm 175 mm<br />
Arbeitsbereich 1. Achse ± 225 Grad<br />
Arbeitsbereich 2. Achse ± 225 Grad<br />
Mittelpunkt 3. Achse<br />
Maximaler<br />
Raum<br />
<strong>RS</strong> Rev. 3 23<br />
Y<br />
X













