

RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...
RS-Serie Manipulator-Handbuch - Das zeichnet Epson Roboter aus ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Wartung 13. Kalibrierung<br />
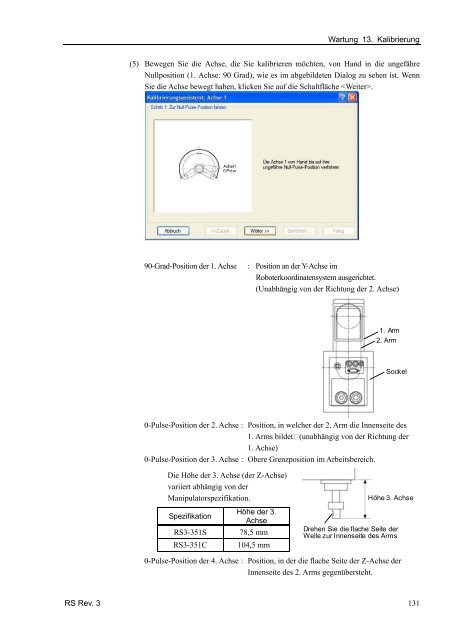
(5) Bewegen Sie die Achse, die Sie kalibrieren möchten, von Hand in die ungefähre<br />
Nullposition (1. Achse: 90 Grad), wie es im abgebildeten Dialog zu sehen ist. Wenn<br />
Sie die Achse bewegt haben, klicken Sie auf die Schaltfläche .<br />
90-Grad-Position der 1. Achse : Position an der Y-Achse im<br />
<strong>Roboter</strong>koordinatensystem <strong>aus</strong>gerichtet.<br />
(Unabhängig von der Richtung der 2. Achse)<br />
1. Arm<br />
2. Arm<br />
Sockel<br />
0-Pulse-Position der 2. Achse : Position, in welcher der 2. Arm die Innenseite des<br />
1. Arms bildet (unabhängig von der Richtung der<br />
1. Achse)<br />
0-Pulse-Position der 3. Achse : Obere Grenzposition im Arbeitsbereich.<br />
Die Höhe der 3. Achse (der Z-Achse)<br />
variiert abhängig von der<br />
<strong>Manipulator</strong>spezifikation.<br />
Spezifikation<br />
Höhe der 3.<br />
Achse<br />
<strong>RS</strong>3-351S 78,5 mm<br />
<strong>RS</strong>3-351C 104,5 mm<br />
Höhe 3. Achse<br />
Drehen Sie die flache Seite der<br />
Welle zur Innenseite des Arms<br />
0-Pulse-Position der 4. Achse : Position, in der die flache Seite der Z-Achse der<br />
Innenseite des 2. Arms gegenübersteht.<br />
<strong>RS</strong> Rev. 3 131













