

artecLab - Universität Bremen
artecLab - Universität Bremen
artecLab - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3. Sensorik und Aktorik 61<br />
3.2.3 Visualisierung des Eingabegerätes<br />
Zwar gab es eine klare Vorstellung von der Funktionsweise<br />
des A.R.M., jedoch Unsicherheiten, ob<br />
sich die Vorstellungen umsetzen ließen ohne einen<br />
entsprechenden Prototypen zum Testen zu entwickeln.<br />
Die Konstruktion eines solchen Prototypen<br />
wäre sehr aufwendig gewesen und bei einer<br />
Fehlkonstruktion wäre für Design und Herstellung<br />
des endgültigen Gerätes wahrscheinlich<br />
nicht mehr ausreichend Zeit übrig geblieben.<br />
Um dieses Dilemma zumindest teilweise zu umgehen,<br />
wurde eine Designstudie des A.R.M. am<br />
Computer erstellt. Dazu wurde zunächst ein vereinfachtes<br />
3D-Modell des Eingabegerätes modelliert.<br />
Anschließend entstand mit Unterstützung<br />
einer Animationssoftware eine Kinematik, mit<br />
der die Eigenschaften des A.R.M. bezüglich der<br />
Freiheitsgrade des Modells dargestellt werden<br />
konnten.<br />
Zuerst wurden die Gelenke konstruiert, die für<br />
das Eingabegerät verwendet werden sollten. Daraus<br />
ließen sich die Freiheitsgrade der einzelnen<br />
Gelenke ableiten. Diese groben Werte konnten<br />
dann in der Kinematikkette verwendet werden.<br />
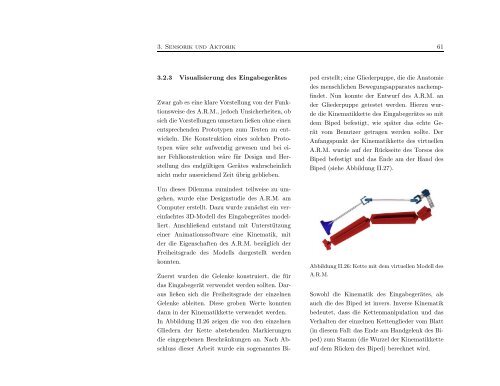
In Abbildung II.26 zeigen die von den einzelnen<br />
Gliedern der Kette abstehenden Markierungen<br />
die eingegebenen Beschränkungen an. Nach Abschluss<br />
dieser Arbeit wurde ein sogenanntes Bi-<br />
ped erstellt; eine Gliederpuppe, die die Anatomie<br />
des menschlichen Bewegungsapparates nachempfindet.<br />
Nun konnte der Entwurf des A.R.M. an<br />
der Gliederpuppe getestet werden. Hierzu wurde<br />
die Kinematikkette des Eingabegerätes so mit<br />
dem Biped befestigt, wie später das echte Gerät<br />
vom Benutzer getragen werden sollte. Der<br />
Anfangspunkt der Kinematikkette des virtuellen<br />
A.R.M. wurde auf der Rückseite des Torsos des<br />
Biped befestigt und das Ende am der Hand des<br />
Biped (siehe Abbildung II.27).<br />
Abbildung II.26: Kette mit dem virtuellen Modell des<br />
A.R.M.<br />
Sowohl die Kinematik des Eingabegerätes, als<br />
auch die des Biped ist invers. Inverse Kinematik<br />
bedeutet, dass die Kettenmanipulation und das<br />
Verhalten der einzelnen Kettenglieder vom Blatt<br />
(in diesem Fall: das Ende am Handgelenk des Biped)<br />
zum Stamm (die Wurzel der Kinematikkette<br />
auf dem Rücken des Biped) berechnet wird.













