Robotics Kongress 2018
Themen und Inhalte des 7. Robotics Kongresses. Kongress | Am 7. Februar 2018 fand die siebte Auflage des Robotics Kongress in Hannover statt. Kernthema der Veranstaltung waren die Zusammenarbeit zwischen Mensch und Roboter. Prof. Sami Haddadin als Keynote-Speaker schilderte den Stand der Technik und zeigt die Trends auf.
Themen und Inhalte des 7. Robotics Kongresses. Kongress | Am 7. Februar 2018 fand die siebte Auflage des Robotics Kongress in Hannover statt. Kernthema der Veranstaltung waren die Zusammenarbeit zwischen
Mensch und Roboter. Prof. Sami Haddadin als Keynote-Speaker schilderte den Stand der Technik und zeigt die Trends auf.

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Anzeige<br />
Sichere und produktive Abstands- und Geschwindigkeitsüberwachung<br />
Roboter ohne Zaun<br />
sicher betreiben<br />
Roboter ohne Zaun sicher zu betreiben ist eine<br />
große Herausforderung, insbesondere im Hinblick<br />
auf die Einhaltung von Mindest abständen. SICK<br />
bietet vollumfängliche Komplett lösungen, die<br />
kooperative Roboteranwendungen sicher und<br />
produktiv machen.<br />
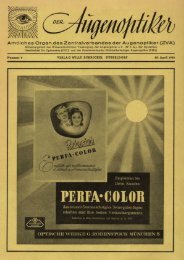
Typische Arbeitsstation<br />
mit Roboter ohne Zaun,<br />
positioniert an einem<br />
stark frequentierten<br />
Durchgang<br />
Egal ob der Roboter zum Bestücken einer Maschine<br />
oder zum Stapeln von Kartons auf einer Palette bei der<br />
Endverpackung eingesetzt wird – das Ziel ist, die<br />
Roboteranwendung mit möglichst wenig Platzbedarf,<br />
geringen Umbaumaßnahmen und minimalem Integrationsaufwand<br />
zu realisieren. Außerdem soll die Bewegungsfreiheit<br />
der Mitarbeiter möglichst wenig<br />
eingeschränkt werden, z. B. durch Anlagen ohne Zaun.<br />
Derartige Installationen können jedoch schnell zu<br />
höheren Kosten und Produktivitätsverlusten führen.<br />
Die EN ISO 13855 definiert den erforderlichen<br />
Mindestabstand, der sich aus der Annäherungsgeschwindigkeit<br />
des Menschen und der Stoppzeit der<br />
gefährlichen Bewegung bestimmt, aber auch einen<br />
Zuschlag für die Detektionsfähigkeit der Schutzeinrichtung<br />
berücksichtigt. Vereinfacht verbirgt sich darunter<br />
im Falle eines Flächenscanners zur Zugangsabsicherung<br />
die Armlänge und Beugung des Rumpfes. So können<br />
sich bei Stoppzeiten von ca. fünf hundert Millisekunden<br />
schnell mal zwei Meter für den Mindestabstand<br />
ergeben. Dieser Platzbedarf ist sehr teuer. Zum anderen<br />
kann durch die Positionierung des Roboters in stark<br />
frequentierten Bereichen oder Gängen die Stillstandszeit<br />
zunehmen. Wenn vorbeigehende Personen jedes<br />
Mal einen Stopp auslösen, sinkt die Produktivität.<br />
SICK bietet verschiedene Möglichkeiten diesen<br />
Platzbedarf zu verringern und die Applikation insgesamt<br />
effizienter zu machen.<br />
Der Einsatz eines horizontal wirkenden Sicherheits-<br />
Laserscanners, der mehrere Schutzfelder simultan<br />
auswerten kann, ermöglicht es, die Position einer sich<br />
nähernden Person zu bestimmen. Die Logik des<br />
Roboters kann so programmiert werden, dass der<br />
Roboter sich bei Annäherung der Person verlangsamt<br />
und damit inkrementell die Stoppzeit verkürzt. Unter<br />
bestimmten Voraussetzungen kann sogar ein automatischer<br />
Wiederanlauf möglich sein. Eine andere Lösung<br />
ist die Nutzung der simultanen Schutzfelder als<br />
Hintertretschutz oder zur Einschränkung des Bereichs<br />
in dem sich der Roboter bewegen darf.<br />
Eine weitere Möglichkeit ist der Einsatz eines vertikal<br />
wirkenden Sicherheits-Laserscanners vergleichbar eines<br />
Sicherheitslichtvorhanges. Durch die derartige Montage<br />
kann die Hand einer sich nähernden Person<br />
schnell erkannt werden und der Mindestabstand damit<br />
verringert werden, da sich der Zuschlagsfaktor für die<br />
Detektionsfähigkeit auf ein Minimum reduziert. Das<br />
führt dazu, dass deutlich weniger Platz benötigt wird<br />
und damit Kosten gesenkt werden können. Die<br />
vertikale Installation von Laserscannern kann relativ<br />
einfach umgesetzt werden, erfordert keine großen<br />
Umbaumaßnahmen und störende Pfosten oder andere<br />
Barrieren sind nicht erforderlich.<br />
SICK geht aber noch einen Schritt weiter und bietet<br />
komplette Sicherheitslösungen an. Diese beinhalten die<br />
benötigten Dienstleistungen, Hardwarekomponenten,<br />
das Experten-Wissen und die komplette Umsetzung<br />
von Projekten. Damit macht SICK Roboteranwendungen<br />
nicht nur sicher und produktiv, sondern unterstützt<br />
Anlagenbetreiber vom Konzept bis zur Abnahme bei<br />
Realisierung ihrer Projekte.<br />
SICK Vertriebs-GmbH<br />
Willstätterstraße 30<br />
40549 Düsseldorf<br />
Deutschland<br />
Tel. 0211 5301-0 | Vertriebsinnendienst: -301<br />
Fax 0211 5301-302<br />
Mail: info@sick.de<br />
Sonderdruck Industrieanzeiger 11