Image Guided Surgery - Technische Universität Dresden
Image Guided Surgery - Technische Universität Dresden
Image Guided Surgery - Technische Universität Dresden

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
me: der Mehrkoordinatenmanipulator (MKM), Firma Zeiss und das SurgiScope, Fir-<br />
ma Elektra SA, Schweden. Beide Systeme messen Koordinaten im Raum mit einem<br />
Roboter und steuern geplante Zielpositionen und Zielwege an.<br />
Zum Bestimmen von Messpunkten verwenden beide Systeme den Fokuspunkt eines<br />
Mikroskopes. Beim MKM-System hängt die Mikroskopeinheit an einem fahrbaren<br />
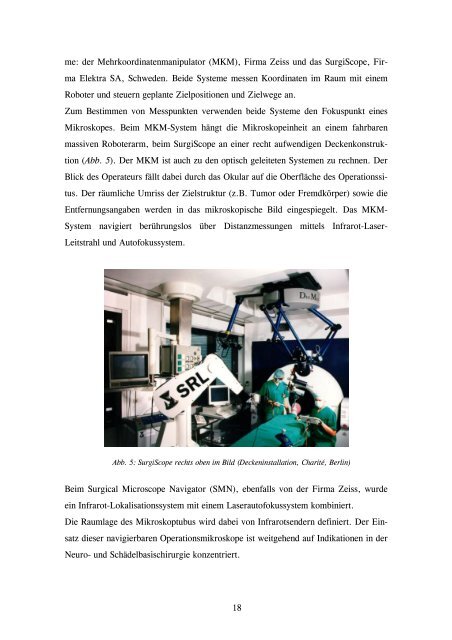
massiven Roboterarm, beim SurgiScope an einer recht aufwendigen Deckenkonstruk-<br />
tion (Abb. 5). Der MKM ist auch zu den optisch geleiteten Systemen zu rechnen. Der<br />
Blick des Operateurs fällt dabei durch das Okular auf die Oberfläche des Operationssi-<br />
tus. Der räumliche Umriss der Zielstruktur (z.B. Tumor oder Fremdkörper) sowie die<br />
Entfernungsangaben werden in das mikroskopische Bild eingespiegelt. Das MKM-<br />
System navigiert berührungslos über Distanzmessungen mittels Infrarot-Laser-<br />
Leitstrahl und Autofokussystem.<br />
Abb. 5: SurgiScope rechts oben im Bild (Deckeninstallation, Charité, Berlin)<br />
Beim Surgical Microscope Navigator (SMN), ebenfalls von der Firma Zeiss, wurde<br />
ein Infrarot-Lokalisationssystem mit einem Laserautofokussystem kombiniert.<br />
Die Raumlage des Mikroskoptubus wird dabei von Infrarotsendern definiert. Der Ein-<br />
satz dieser navigierbaren Operationsmikroskope ist weitgehend auf Indikationen in der<br />
Neuro- und Schädelbasischirurgie konzentriert.<br />
18