Nr. 1 Atwood´sche Fallmaschine Teil A - KFU
Nr. 1 Atwood´sche Fallmaschine Teil A - KFU
Nr. 1 Atwood´sche Fallmaschine Teil A - KFU

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
<strong>Nr</strong>. 1 <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> <strong>Teil</strong> A<br />
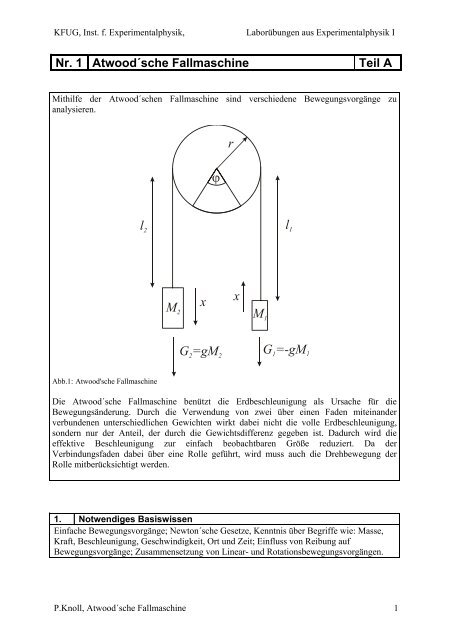
Mithilfe der <strong>Atwood´sche</strong>n <strong>Fallmaschine</strong> sind verschiedene Bewegungsvorgänge zu<br />
analysieren.<br />
Abb.1: Atwood'sche <strong>Fallmaschine</strong><br />
Die <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> benützt die Erdbeschleunigung als Ursache für die<br />
Bewegungsänderung. Durch die Verwendung von zwei über einen Faden miteinander<br />
verbundenen unterschiedlichen Gewichten wirkt dabei nicht die volle Erdbeschleunigung,<br />
sondern nur der Anteil, der durch die Gewichtsdifferenz gegeben ist. Dadurch wird die<br />
effektive Beschleunigung zur einfach beobachtbaren Größe reduziert. Da der<br />
Verbindungsfaden dabei über eine Rolle geführt, wird muss auch die Drehbewegung der<br />
Rolle mitberücksichtigt werden.<br />
1. Notwendiges Basiswissen<br />
Einfache Bewegungsvorgänge; Newton´sche Gesetze, Kenntnis über Begriffe wie: Masse,<br />
Kraft, Beschleunigung, Geschwindigkeit, Ort und Zeit; Einfluss von Reibung auf<br />
Bewegungsvorgänge; Zusammensetzung von Linear- und Rotationsbewegungsvorgängen.<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 1
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
2. Aufgabenstellungen<br />
a) Bestimme das Weg-Zeit-Diagramm einer gleichmäßig beschleunigten Bewegung<br />
mithilfe der <strong>Atwood´sche</strong>n <strong>Fallmaschine</strong>.<br />
b) Berechne aus dem Weg-Zeit-Diagramm das Geschwindigkeits-Zeit-Diagramm, das<br />
Beschleunigungs-Zeit-Diagramm und das Beschleunigungs-Geschwindigkeits-Diagramm<br />
c) Werte aus den erstellten Diagrammen den Anteil der Reibung aus.<br />
d) Analysiere die Bewegung einer über die Rolle fallender Kette.<br />
Vorgangsweise<br />
ad a) Vor Starten der Messung wird durch Doppelklicken der Ikone "getatwood" der<br />
Computer in Aufnahmebereitschaft versetzt. Ein eigenes Fenster<br />
(Übertragungsfenster) wird am Bildschirm geöffnet und die aktuellen Daten der<br />
seriellen Schnittstelle angezeigt. Die Gewichte werden in Ausgangsstellung<br />
gebracht. Dabei wird der rechte Kontakt geschlossen. Bei Loslassen des Fadens<br />
bewegt sich die schwerere der beiden Massen beschleunigt nach unten. Dabei wird<br />
der Auslösekontakt freigegeben, was den Messvorgang startet. Wenn das leichtere<br />
Gewicht oben an der Prallplatte anstößt, wird der Endkontakt betätigt und der<br />
Messvorgang beendet. Die pro Längenintervall gemessenen Zeiten werden an den<br />
Computer übertragen. Wenn im geöffneten Übertragungsfenster keine<br />
Fehlermeldung ausgegeben wird, so war die Datenübertragung erfolgreich. Die<br />
Daten werden im file "test.dat" auf D:\daten abgespeichert. Durch Betätigung der<br />
"Return" Taste wird das Übertragungsfenster geschlossen. Falls ein Fehler<br />
aufgetreten ist, muss das Experiment wiederholt werden. Durch Doppelklicken der<br />
Ikone "atwood" wird ORIGIN gestartet, welches für dieses Experiment bereits<br />
vorbereitet konfiguriert ist. Durch aktivieren des Worksheets und der Spalte A kann<br />
mit der Funktion Importieren ASCII das file "test.dat" in die Spalte A übertragen<br />
werden. Die Werte sind auf ihre Richtigkeit zu überprüfen. Es kann öfters<br />
vorkommen, dass die Randwerte unvollständig übertragen werden; diese sind dann<br />
im Worksheet zu löschen. Um die richtigen Zeitwerte für die x-Achse und die<br />
richtigen Wegwerte für die y-Achse zu erhalten, muss noch richtig kalibriert<br />
werden. Dazu muss während der Messung die Gesamtzeit tG, welche zwischen<br />
Startvorgang (Lösen des Startkontaktes) und Beendigung (Betätigung des<br />
Endkontaktes) verstrichen ist,, mit einer Stoppuhr gemessen werden. Außerdem<br />
muss die Gesamtwegstrecke lG mit dem Rollmaßband bestimmt werden. In die<br />
Spalte t des Worksheet sind die Daten aus Spalte A so skaliert zu übertragen, dass<br />
die Gesamtzeit (letzter gültiger übertragener Wert) genau der gemessenen<br />
Gesamtzeit entspricht. Ebenso sind in der Spalte s die richtigen Wegstrecken<br />
einzutragen. Diese sind äquidistant mit den übertragenen Zeitwerten. Demnach<br />
entspricht dann die Anzahl N der übertragenen Werte der Gesamtlänge lG, wodurch<br />
sich die richtige Skalierung als Weginkrement lG/N ergibt. Das Wegzeitdiagramm<br />
kann dann im richtigen Maßstab und richtig skaliert dargestellt werden. Durch Fitten<br />
mit einem quadratischen Polynom kann die wirksame Beschleunigung, ein<br />
möglicher Offsetwert des Weges etc. bestimmt werden. Der Versuch kann mit 2<br />
verschiedenen Trägheitsmomenten der Umlenkrolle durchgeführt werden. Das<br />
Trägheitsmoment der Umlenkrolle wird aus der Masse ermittelt.<br />
ad b) Durch Differenzieren des zurückgelegten Weges mit der Zeit werden die benötigten<br />
weiteren Diagramme erstellt. Wird das Differenzieren numerisch als<br />
Spaltenberechnung in ORIGIN programmiert, dann ist zu beachten, dass aufgrund<br />
der Ungenauigkeit der Messwerte in den höheren Ableitungen großes Rauschen<br />
auftreten kann. Dieses Rauschen kann reduziert werden, indem die Weg und<br />
Zeitdifferenzen über ein größeres Intervall genommen werden. Durch Fitten der<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 2
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
erhaltenen Diagramme mit den entsprechenden theoretisch abgeleiten Funktionen,<br />
welche der Bewegung zugrunde liegen, können die Randbedingungen s0, t0, v0 und<br />
die wirksame Beschleunigung bestimmt werden.<br />
ad c) Durch Vergleich der gemessenen Daten in Weg-Zeit-, Geschwindigkeits-Zeit- und<br />
Beschleunigungs-Zeit-Diagramm mit der entsprechend gerechneten Kurve, wird die<br />
Differenz als auftretende Reibung interpretiert. Wird die Differenz zwischen<br />
gerechneter und gemessener Beschleunigung mit der wirksamen trägen Masse<br />
multipliziert, so kann die wirksame Reibungskraft direkt abgelesen werden. Aus den<br />
Diagrammen Beschleunigung-Zeit, Beschleunigung-Weg und Beschleunigung-<br />
Geschwindigkeit können Hinweise gefunden werden, ob die wirksame Reibung eine<br />
konstante Kraft ist (z.B. Gleit- oder Rollreibung), oder ob Inhomogenitäten eine<br />
Rolle spielen (Ortsabhängigkeit der Reibung) oder eine<br />
Geschwindigkeitsabhängigkeit der Reibung eine Rolle spielt.<br />
ad d) Der Versuch mit der fallenden Kette kann in gleicher Weise durchgeführt werden<br />
wie unter a) beschrieben, nur mit dem Unterschied, dass zum Starten und Stoppen<br />
der Messung die entsprechenden Schalter zusätzlich händisch bedient werden<br />
müssen. Das entsprechende Zahnrad ist als Umlenkrolle zu montieren. Die Montage<br />
der Gewichte sollte hier nicht erfolgen, da dann das Gesamtgewicht zu groß wird<br />
und die Lager und Achse beschädigt werden können.<br />
3. Zur Auswertung notwendige Zusammenhänge<br />
ad a)<br />
ad b)<br />
ad c)<br />
ad d)<br />
( A(<br />
i)<br />
)<br />
Max = A(<br />
imax<br />
) lG<br />
t(<br />
i)<br />
= A(<br />
i)<br />
, s(<br />
i)<br />
= i ,<br />
t<br />
i<br />
1<br />
s( t)<br />
= s0<br />
+ b 0 0 0 0 − t<br />
2<br />
G<br />
2 ( t − t ) − bt ( t − t ) + v ( t )<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 3<br />
0<br />
max<br />
M 2 − M 1<br />
v ( t)<br />
= b(<br />
t − t0<br />
) + v0<br />
, b = g<br />
M r<br />
M1<br />
+ M 2 +<br />
2<br />
siehe ad a) und ad b)<br />
g<br />
b =<br />
( M − M + ρ ( 2l<br />
( 0)<br />
− l ) )<br />
2<br />
1<br />
⎛<br />
⎜ M<br />
⎝<br />
1<br />
f<br />
+ M<br />
2<br />
2 0 − 2gρ<br />
f x I M r<br />
, = + πrρ<br />
2<br />
f<br />
I ⎞ r 2<br />
+ ρ f l0<br />
+ 2 ⎟<br />
r ⎠
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
<strong>Nr</strong>. 1 <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> <strong>Teil</strong> B<br />
4. Beschreibung der Geräte<br />
4.1. Geräteliste<br />
1.<br />
Atwood'sche <strong>Fallmaschine</strong> mit Elektronik zur Datenerfassung und serieller Schnittstelle zum<br />
Übertragen der Messdaten zum Computer. Zweite Umlenkrolle und Zahnrad mit Fahrradkette.<br />
2.<br />
Computer mit Windows 2000, Übertragungsprogramm, ORIGIN zum Auswerten.<br />
3.<br />
Maßband<br />
4.<br />
Stoppuhr<br />
4.2. Detailbeschreibungen<br />
Computer<br />
Atwood-Maschine<br />
Zubehör<br />
Umlenkrolle<br />
Stop-Kontakt Start-Kontakt<br />
Maßband,<br />
Stopuhr<br />
Schnittstelle<br />
Umlenkrolle<br />
Zahnrad<br />
Kette<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 4
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Ad 1) Die Atwood'sche <strong>Fallmaschine</strong> besitzt auf der Achse der Umlenkrolle einen optischen<br />
Geber, welcher Impulse pro zurückgelegter Wegstrecke abgibt. In der nachfolgenden<br />
Elektronik wird die Zeit seit dem Startvorgang, welcher durch Lösen des rechten Kontaktes<br />
erfolgt, pro Impuls und somit pro zurückgelegter Wegstrecke gemessen und abgespeichert.<br />
Nach Beendigung, welche durch Betätigung des linken Kontaktes erfolgt, werden die<br />
gespeicherten Zeitwerte über eine Serielle Schnittstelle (COM1:, 9600Bd, 8Bit, no parity, 1<br />
Stoppbit) automatisch ohne Handshake gesendet. Durch Betätigung der Starttaste wird die<br />
Elektronik zurückgesetzt und alle bisherigen Messdaten gelöscht. Die Umlenkrolle ist einfach<br />
auswechselbar und kann gegen eine Umlenkrolle mit anderem Trägheitsmoment getauscht<br />
werden oder es kann die Zahnkranzrolle für die Fahrradkette montiert werden.<br />
Ad 2)<br />
Mit dem Usernamen "student" kann der Computer benützt werden. Das Password bitte vom<br />
Betreuer erfragen. Zwei Programme sind für den Versuch vorbereitet. Das erste ist ein DOSbatch<br />
Programm, welches die serielle Schnittstelle (COM1:) auf die richtigen Werte setzt und<br />
dann mit copy die Daten von der seriellen Schnittstelle in ein file "test.dat" überträgt. Dieses<br />
Programm wird mit der Ikone "getatwood" gestartet. Da durch die geringe Priorität des<br />
Benützers "student" das System die Übertragung, welche ohne handshake erfolgt, stören kann,<br />
können Übertragungsfehler auftreten. Der Versuch ist dann zu wiederholen. Die Bearbeitung<br />
des files "test.dat" erfolgt mit ORIGIN. Dazu ist bereits ein dafür adaptiertes Projekt erstellt,<br />
welches über die Ikone "atwood" gestartet werden kann. Diese Programme können vom<br />
Benutzer "student" nicht überschrieben werden. Sollen die notwendigen Änderungen im<br />
Origin Projekt gespeichert werden, so muss dies unter einem anderen Namen erfolgen.<br />
5. Besondere Hinweise zum Umgang mit dem Gerät, Sicherheitshinweise<br />
Vorsicht vor den beschleunigten Massen! Vor allem die fallende Kette kann vom Zahnrad<br />
springen und bei unvorsichtiger Position zu Verletzungen führen! Die Massen am Faden<br />
sollten nicht pendeln, wenn der Bewegungsvorgang gestartet wird, weil sonst die Gewichte<br />
während ihrer beschleunigten Bewegung gegen die Tischplatte stoßen können. Bei Problemen<br />
mit der Datenübertragung zuerst mit Hyperterminal prüfen, was an der Seriellen Schnittstelle<br />
für Daten ankommen. Durch Stromaus- und Einschalten der Schnittstellenelektronik und/oder<br />
neu Hochfahren des Computers können etwaige Probleme meistens gelöst werden. Kette und<br />
Gewichte sollten nicht zusammen montiert werden, da dann wegen der großen Gesamtmasse<br />
die Wucht an den Schaltern zu groß ist, und die Achse abgeschlagen werden kann.<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 5
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
<strong>Nr</strong>. 1 <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> <strong>Teil</strong> C<br />
6. Literatur<br />
• Siehe z.B. Bergmann-Schäfer Bd1.<br />
7. Kontrollfragen<br />
• Wie erfolgt die idealisierte Bewegung ohne Reibung?<br />
• Warum muss das Trägheitsmoment der Umlenkrolle berücksichtigt werden?<br />
• Warum wird das Rauschen der Messdaten bei mehrmaligen Differenzieren immer<br />
größer?<br />
• Wie würde sich eine geschwindigkeitsabhängige Reibung auswirken?<br />
• Warum unterscheidet sich die fallende Kette signifikant von der Bewegung der<br />
beiden Massen, welche mit einem masselosen Faden verbunden sind?<br />
8. Grundlagen<br />
8.1. Einfache Bewegungen<br />
Die Bewegungen von Körpern entstehen durch das Zusammenspiel von folgenden<br />
physikalischen Größen: Kräften ( F r ), Massen (M), Ort ( x r )und Zeit (t). Weitere Größen wie<br />
r<br />
r ∂x<br />
r<br />
zum Beispiel der Impuls ( p = M = Mx&r<br />
= Mv<br />
) oder der Energieinhalt (potentielle und<br />
∂t<br />
kinetische) können daraus abgeleitet werden. Die physikalischen Gesetzmäßigkeiten, die nun<br />
zwischen diesen Größen wirken, wurden von Newton durch Beobachtung herausgefunden.<br />
Insbesondere ist dabei die Kraft als die Änderung des Bewegungszustandes einer Masse<br />
erkannt worden. Die Newton'schen Axiome lauten:<br />
1. Jeder Massepunkt verharrt im Zustand der Ruhe oder der gleichförmigen Bewegung auf<br />
geradliniger Bahn solange keine Kräfte auf ihn einwirken.<br />
2. Definition der Kraft: Kraft ist die Ursache einer Impulsänderung (Beschleunigung (b r )).<br />
3. actio = reactio: Jede Kraft erzeugt eine gleich große Gegenkraft.<br />
Diese mit Worten definierten Gesetze lassen sich etwas kompakter mathematisch<br />
formulieren. Die beiden ersten Gesetze ergeben die bekannte Beziehung:<br />
r<br />
F<br />
p<br />
x x<br />
p Mb<br />
Mv<br />
M M Mx<br />
Mx&<br />
t<br />
t t<br />
r & & r<br />
r r<br />
2 r r<br />
∂ &r & r ∂ & ∂<br />
= = + = + = + .<br />
∂<br />
∂ ∂<br />
= 2<br />
Dabei wurde gleich von der Vektorschreibweise Gebrauch gemacht. Bei konstanter Masse<br />
trägt nur mehr der Term mit der Beschleunigung bei.<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 6
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
r r<br />
Das 3. Newton'sche Axiom, dass es zu jeder Kraft auch eine Gegenkraft gibt, also Fi<br />
= −F<br />
j ,<br />
führt zur wichtigen Beziehung, dass bei Berücksichtigung sämtlicher Kräfte offenbar gilt:<br />
∑ i<br />
Fi r<br />
= 0 .<br />
Solche Systeme, wo es keine mehr nach außen gerichteten Kräfte gibt, nennt man<br />
abgeschlossene Systeme. Diese beiden mathematischen Ausdrücke bilden die Grundlagen für<br />
die Behandlung sämtlicher Bewegungsprobleme. Wählen wir als einfachen Fall eine<br />
konstante Masse M auf die eine zeitlich und örtlich konstante Kraft F in Richtung x wirken<br />
soll. Da hier ein streng eindimensionales Problem vorliegt, können wir auf die<br />
Vektorschreibweise verzichten. Aus ∑ Fi = 0<br />
i<br />
r<br />
folgt, dass es eine gleich große Gegenkraft<br />
geben muss. Dies ist die sogenannte Trägheitskraft, welche nach F M&x<br />
& r r<br />
= für die Änderung<br />
des Bewegungszustandes verantwortlich ist. Wir erhalten direkt die Bewegungsgleichung:<br />
F − M&<br />
x&<br />
= 0.<br />
Durch Lösen dieser Differentialgleichung erhalten wir sämtliche Zusammenhänge zwischen<br />
Weg, Zeit, Geschwindigkeit und Beschleunigung:<br />
F<br />
b = & x&<br />
= =<br />
M<br />
const.<br />
bzw. durch Integrieren:<br />
t<br />
F F<br />
v(<br />
t)<br />
= x = ∫ xdt<br />
= ∫ dt = ( t − t0<br />
) + v0<br />
M M<br />
& & .<br />
t<br />
0<br />
t<br />
t<br />
0<br />
Besonderer Augenmerk ist hier auf die Integrationsgrenzen und die Integrationskonstante zu<br />
legen, da diese die entsprechenden Randbedingungen festlegen. In unserem Fall wurde ganz<br />
allgemein als Randbedingung festgelegt, dass zur Zeit t0 die Geschwindigkeit v0 vorliegen<br />
soll. Durch weiteres Integrieren erhält man:<br />
s(<br />
t)<br />
t<br />
t<br />
= s0<br />
+ ∫ v(<br />
t)<br />
dt = s0<br />
+ ∫<br />
t<br />
t<br />
0<br />
0<br />
⎛<br />
⎜<br />
⎝<br />
F<br />
M<br />
2<br />
( t − t ) + v dt = s + ( t − t ) − t ( t − t ) + v ( t − t )<br />
0<br />
0<br />
⎞<br />
⎟<br />
⎠<br />
Im besonderen Fall der Randbedingungen, dass t0=0, s0=0 und v0=0 sind, erhalten wir die<br />
bekannte Gesetzmäßigkeit der gleichförmig beschleunigten Bewegung:<br />
F 1<br />
s ( t)<br />
t = bt<br />
2M<br />
2<br />
2 2<br />
= .<br />
Bis jetzt wurden nur die Abhängigkeiten gegenüber der Zeit angegeben. Von allen anderen<br />
möglichen Beziehungen soll lediglich noch die Frage geklärt werden, welche<br />
Geschwindigkeit liegt an welchem Ort vor. Dies erhält man durch Elimination der Zeit,<br />
welche durch den Weg ausgedrückt werden kann. Wir gehen von den einfachen<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 7<br />
0<br />
F<br />
2M<br />
0<br />
F<br />
M<br />
0<br />
0<br />
0<br />
0<br />
.
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Randbedingungen aus und erhalten:<br />
F F 2Ms<br />
2Fs<br />
v( s)<br />
= t = = = 2bs<br />
.<br />
M M F M<br />
Nachteil der hier verwendeten Methode, aus den Kräftegleichungen zu<br />
Bewegungsgleichungen zu kommen, ist, dass in komplexeren Systemen nicht immer alle<br />
Kräfte leicht zu erkennen sind und dadurch leicht Fehler entstehen. Deswegen wurden<br />
weitere Verfahren entwickelt, welche von der kinetischen und potentiellen Energie eines<br />
Systems ausgehen, welche oft einfacher zu erkennen sind. Der Vollständigkeit halber sollen<br />
sie hier kurz angeführt werden.<br />
Das Lagrange Verfahren:<br />
Aus der kinetischen Gesamtenergie eines Systems T und der gesamten potentiellen Energie V<br />
wird die Lagrange-Funktion L( x,<br />
x&<br />
) = T −V<br />
r r<br />
gebildet, welche als Variablen den<br />
generalisierten Ort und seine zeitliche Ableitung beinhaltet. Die Bewegungsgleichungen<br />
∂ ∂L<br />
∂L<br />
erhält man dann nach folgender Vorschrift: − = 0.<br />
∂t<br />
∂x&<br />
∂x<br />
In unserem vorigen Beispiel der einfachen gleichförmigen Beschleunigung lautet die<br />
1 2<br />
Lagrange-Funktion: L ( x,<br />
x&<br />
) = Mx&<br />
+ Fx<br />
2<br />
M& x&<br />
− F = 0.<br />
und man erhält als Bewegungsgleichung:<br />
Hamilton Formulismus:<br />
Hier geht man von der Gesamtenergie eines Systems aus, welche durch generalisierten Ort<br />
r r<br />
und Impuls in Form der Hamiltonfunktion H ( x,<br />
p)<br />
= T + V angegeben wird. Die<br />
H<br />
Bewegungsgleichung erhält man dann nach folgender Vorschrift: p&r ∂<br />
= − r zusammen mit<br />
∂x<br />
H<br />
x&r ∂<br />
= r . Dieser Formalismus leitet bereits zur quantenmechanischen Behandlung über.<br />
∂p<br />
In unserem vorigen Beispiel der einfachen gleichförmigen Beschleunigung lautet die<br />
2<br />
1 2 p<br />
Hamilton-Funktion: H ( x,<br />
p)<br />
= Mx&<br />
− Fx = − Fx . Als Bewegungsgleichungen erhält<br />
2<br />
2M<br />
p<br />
man: p & = F und x & = . Daraus erhält man wiederum die bereits bekannte<br />
M<br />
Bewegungsgleichung als Differentialgleichung 2. Ordnung in x: M & x&<br />
= F .<br />
8.2. Lineare Bewegungen und Rotationen<br />
Die Mechanik rotierender Körper wird meist als wesentlich schwieriger empfunden. Sind<br />
dann noch rotierende <strong>Teil</strong>e mit linear bewegten verbunden, wie dies bei den meisten<br />
mechanischen Maschinen der Fall ist, treten oft ungeahnte Schwierigkeiten auf. Die rollende<br />
Kugel ist ein einfaches Beispiel einer Rotationsbewegung (die der Kugel), welche mit einer<br />
linearen Bewegung (die des Massenschwerpunktes) verkoppelt ist, ebenso wie die<br />
<strong>Atwood´sche</strong> <strong>Fallmaschine</strong>. Wir wollen zuerst ein paar einfache Gesetzmäßigkeiten von<br />
rotierenden Massepunkten herleiten, und dann das Problem der Verkopplung mit linearen<br />
Bewegungen an Beispielen behandeln.<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 8
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
8.2.1. Mechanik rotierender starrer Körper<br />
Gehen wir von dem Gesetz F M&x<br />
& r r<br />
= aus, welches aus den Newton'schen Axiomen gewonnen<br />
wurde. Für mehrere Massepunkte lässt es sich erweitern zu: F − M&x<br />
& = 0<br />
r r<br />
. Rotationen sind<br />
nun dadurch charakterisiert, dass dabei alle Punkte auf einer Geraden, der Drehachse,<br />
unverändert bleiben. Wir wählen nun einen Punkt auf der Drehachse als Bezugspunkt und<br />
betrachten für alle i Massepunkte den Ortsvektor ri r bezüglich dieses Bezugspunktes. Wir<br />
erweitern die letzte Gleichung indem wir mit den Vekoren ri r von links das Vektorprodukt<br />
bilden und erhalten: ∑ ri<br />
× ( Fi<br />
− M i xi<br />
) = = ∑ ri<br />
× Fi<br />
− ri<br />
× M i xi<br />
= ∑ ri<br />
× Fi<br />
− ri<br />
× p&<br />
i<br />
i<br />
i<br />
i<br />
r r r r<br />
& r r r r<br />
& r<br />
r r<br />
0 . Dabei<br />
r r r<br />
r r r<br />
wird die Größe Ti<br />
= ri<br />
× Fi<br />
das Drehmoment und li<br />
= ri<br />
× pi<br />
der Drehimpuls des i-ten<br />
Massepunktes genannt. Damit haben wir bereits eine Formulierung des Newton'schen<br />
r &r<br />
Gesetzes für Rotationen gefunden: ∑ Ti<br />
= ∑li<br />
. Weiters ist es zweckmäßig bei Rotationen<br />
i i<br />
anstelle der Ortskoordinate eine Winkelkoordinate einzuführen, welche entsprechend des<br />
Drehsinnes (Rechtssystem) ebenfalls ein Vektor ist. Für eine infinitesimale Verschiebung<br />
r r r r<br />
gilt: dx<br />
= dϕ<br />
× r + dr<br />
. Für Winkelgeschwindigkeit und Winkelbeschleunigung des i-ten<br />
Massepunktes erhält man: vi<br />
xi<br />
i ri<br />
ri<br />
i ri<br />
r&<br />
i<br />
r r r<br />
r &r &r r<br />
= = ϕ × + &r<br />
= ω × + und bi<br />
xi<br />
i ri<br />
i r &<br />
i r&<br />
i<br />
r<br />
& &r r r &r<br />
r r<br />
= = ω × + ω × + .<br />
Damit kann man auf reine Winkelgrößen transformieren und erhält für den Drehimpuls:<br />
r r r r r r r r r t r<br />
li = ri<br />
× pi<br />
= ri<br />
× M ivi<br />
= M iri<br />
× ωi<br />
× ri<br />
+ M iri<br />
× r&r<br />
i = Iiω<br />
i + 0 . Dabei wurde aus dem etwas<br />
komplizierten Ausdruck mit dem doppelten Kreuzprodukt der Vektor der<br />
Winkelgeschwindigkeit herausgezogen, wofür ein Tensor 2. Stufe eingeführt werden musste.<br />
Dieser Tensor wird Trägheitsmoment genannt und kann durch komponentenweisen<br />
Vergleich bestimmt werden:<br />
2 2<br />
⎛ri<br />
, y + ri<br />
, z ⎜<br />
Ii = M i ⎜ − ri<br />
, xri<br />
, y<br />
⎜<br />
⎝ − ri<br />
, xri<br />
, z<br />
t<br />
− r<br />
i,<br />
x i,<br />
y<br />
2<br />
i,<br />
x<br />
2<br />
+ ri<br />
, z<br />
r<br />
− r<br />
r<br />
r<br />
i,<br />
y i,<br />
z<br />
− r<br />
− r<br />
i,<br />
x i,<br />
z<br />
i,<br />
y i,<br />
z<br />
2<br />
i,<br />
x<br />
2<br />
+ ri<br />
, y<br />
r<br />
r<br />
r<br />
⎞<br />
⎟<br />
⎟ .<br />
⎟<br />
⎠<br />
Dieser Tensor des Trägheitsmomentes ist symmetrisch und ein wichtiges Hilfsmittel bei der<br />
Beschreibung von Drehbewegungen. Wir betrachten nun wiederum die eigentliche<br />
Bewegungsgleichung und transformieren den Term mit der Drehimpulsänderung ebenfalls<br />
t<br />
auf Winkelgrößen: li ri<br />
M &<br />
i x&<br />
r<br />
i ri<br />
M &r r r r<br />
&t r<br />
iωi<br />
ri<br />
ri<br />
M iωi<br />
r&r<br />
I &r<br />
iωi<br />
I iωi<br />
r r &r<br />
= × = × × + × × = + . Damit erhalten<br />
wir bereits die Bewegungsgleichung ausgedrückt in Winkelgrößen:<br />
( Ti<br />
− Iiω<br />
i − Iω<br />
i ) = ( Ti<br />
− Iiϕ<br />
i − I &<br />
i ) r & &t r<br />
r t &t r r t<br />
&r<br />
r r r r<br />
∑ ∑⎜⎛<br />
&r<br />
0 = r × − × = − ⎟⎞<br />
i Fi<br />
ri<br />
p&r<br />
i Ti<br />
li<br />
=<br />
⎝ ⎠ ∑ ∑<br />
ϕ .<br />
i<br />
i<br />
i<br />
Wichtig ist zu betonen, dass bis jetzt nur mathematische Umformungen auf<br />
Winkeländerungen durchgeführt wurden, und daher auch in dieser Form beliebige<br />
Bewegungen beschrieben werden können. Dabei ist die Wahl des Bezugspunktes auf der<br />
Drehachse nicht unbedingt notwendig. Von Vorteil ist diese Art der Beschreibung allerdings<br />
bei reinen Rotationen, da dann alle Massepunkte die gleiche Winkelgeschwindigkeit<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 9<br />
i<br />
∑ i<br />
i<br />
i
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
besitzen. Wählt man dann den Bezugspunkt auf der Drehachse und betrachtet Drehungen um<br />
den Schwerpunkt, dann werden die Gleichungen besonders einfach und auch der Tensor des<br />
Trägheitsmomentes wird während dieser reinen Rotation eine recht einfach zu berechnende<br />
konstante Größe. Interpretieren wir die Änderung des Drehimpulses ebenfalls als<br />
Drehmoment, so erhält man noch folgende Gleichung:<br />
∑ j<br />
T r<br />
j<br />
= 0 .<br />
Diese letzten beiden Gleichungen stellen die Newton'schen Axiome in Winkelgrößen dar.<br />
Damit lässt sich jedes mechanische Problem genauso lösen. Für reine Rotationen, wo alle<br />
Massepunkte die gleiche Winkelgeschwindigkeit besitzen, vereinfachen sie sich zu:<br />
( − ϕ ) = − ϕ = − ϕ = − & ω 0<br />
r r t<br />
& r t r t<br />
& r r<br />
& r r t<br />
T I T I T I T I<br />
0 = ∑ i i i ∑ i ∑ i<br />
=<br />
i<br />
i<br />
i<br />
Dabei kann bezogen auf eine Achse ein Gesamtträgheitsmoment des Körpers angegeben<br />
werden, welches konstant ist.<br />
8.2.2. Beispiel: Rotierender Massepunkt<br />
Als einfaches Beispiel betrachten wir einen mit konstanter Winkelgeschwindigkeit ω im<br />
festen Abstand r zur Drehachse rotierenden Punkt mit der Masse M. Zunächst behandeln wir<br />
das Problem im herkömmlichen kartesischen Koordinatensystem und den darauf<br />
formulierten Newton'schen Gesetzen. Die rotierende Bewegung soll in der x-y-Ebene<br />
stattfinden und wir erhalten für Ortsvektor, Geschwindigkeit und Beschleunigung:<br />
⎛r<br />
cosωt<br />
⎞<br />
r ⎜ ⎟<br />
x = ⎜ r sinωt<br />
⎟ ,<br />
⎜ ⎟<br />
⎝ 0 ⎠<br />
⎛− rω<br />
sinωt<br />
⎞<br />
r ⎜ ⎟<br />
v = ⎜ rω<br />
cosωt<br />
⎟<br />
⎜ ⎟<br />
⎝ 0 ⎠<br />
und<br />
2<br />
⎛−<br />
rω<br />
cosωt<br />
⎞<br />
r ⎜<br />
⎟<br />
2<br />
b = ⎜ − rω<br />
sinωt<br />
⎟ .<br />
⎜<br />
⎟<br />
⎝ 0 ⎠<br />
Aus den Newton'schen Axiomen folgt ein Kraftvektor, welcher für die Beschleunigung<br />
verantwortlich sein muss:<br />
2<br />
⎛ Fx<br />
⎞ ⎛−<br />
rω<br />
cosωt<br />
⎞<br />
r ⎜ ⎟ r ⎜<br />
⎟<br />
2<br />
F = ⎜ Fy<br />
⎟ = Mb<br />
= M ⎜ − rω<br />
sinωt<br />
⎟ .<br />
⎜ ⎟ ⎜<br />
⎟<br />
⎝ Fz<br />
⎠ ⎝ 0 ⎠<br />
Diese Kraft ist auf die Drehachse gerichtet und wird von der starren Verbindung des<br />
Massepunktes zur Drehachse aufgenommen. Sie wird Zentripedalkraft genannt. Der Betrag<br />
2<br />
der Kraft ist F = F = Mrω<br />
r<br />
. Die entsprechend gegengesetzte Kraft ist die Trägheitskraft<br />
und weist vom Drehmittelpunkt weg, ist gleich groß und ist die allgemein bekannte<br />
Fliehkraft. Diese auftretenden Kräfte, die nicht a priori vorgegeben wurden und erst<br />
zwanghaft entstanden sind um einen bestimmten Bewegungsvorgang (Rotation) zu<br />
ermöglichen, werden Zwangskräfte genannt. Eine weitere Zwangskraft, die Corioliskraft,<br />
tritt bei diesem einfachen Problem nicht auf, weil der Abstand zur Drehachse konstant ist.<br />
Wichtig ist anzumerken, dass der Ortsvektor zwar den augenblicklichen Ort des<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 10<br />
.
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Massepunktes beschreibt, aber sein Betrag nicht dem zurückgelegten Weg entspricht. Diesen<br />
erhalten wir als Integration über den Betrag der Geschwindigkeit:<br />
t<br />
t<br />
r<br />
s(<br />
t)<br />
= ∫ v(<br />
t)<br />
dt = ∫<br />
t<br />
2 2 2 2 2 2<br />
r ω sin ωt<br />
+ r ω cos ωt<br />
dt = ∫ rωdt<br />
= rωt<br />
. Die Integrations-<br />
0<br />
0<br />
0<br />
konstante wurde hier mit Null angenommen.<br />
In gleicher Weise lässt sich dieses Problem mit Hilfe der vorhin abgeleiteten Gesetze für<br />
Winkeländerungen beschreiben. Der Massepunkt rotiert mit konstanter<br />
Winkelgeschwindigkeit und man erhält:<br />
⎛Tx<br />
⎞ ⎛ I xx I xy I xz ⎞⎛<br />
0 ⎞<br />
r ⎜ ⎟ t ⎜<br />
⎟⎜<br />
⎟<br />
T = ⎜T<br />
⎟ = &v<br />
y Iω<br />
= ⎜ I xy I yy I yz ⎟⎜<br />
0 ⎟ .<br />
⎜ ⎟ ⎜<br />
⎟⎜<br />
⎟<br />
⎝T<br />
⎠ ⎝<br />
⎠⎝<br />
&<br />
z I xz I yz I zz ω = 0⎠<br />
Demnach handelt es sich um eine drehmomentfreie gleichförmige Rotation in Analogie zur<br />
kräftefreien gleichförmigen linearen Bewegung. Hier sieht man bereits den Vorteil der<br />
Verwendung der Gleichungen in Winkelgrößen, da die Beschreibung wesentlich einfacher<br />
ist. Allerdings nur solange, als man nur in dem Verhalten der makroskopischen<br />
Drehbewegungen interessiert ist. Zwangskräfte, wie z.B. die Fliehkraft sind hier nicht<br />
explizit ersichtlich. Etwas tieferen Einblick erhält man noch, wenn nun die einzelnen<br />
Drehgrößen wie Drehmomente, Drehimpulse und Trägheitsmomente auch tatsächlich<br />
ausgerechnet werden. In unserem Fall der einfachen Rotation in einer Ebene sind nur die z-<br />
Komponenten von Bedeutung. Wir berechnen:<br />
2<br />
⎛r<br />
cosωt<br />
⎞ ⎛−<br />
rω<br />
cosωt<br />
⎞ ⎛<br />
0<br />
⎞<br />
r v r ⎜ ⎟ ⎜<br />
⎟ ⎜<br />
⎟<br />
2<br />
T = r × F = ⎜ r sinωt<br />
⎟ × M ⎜ − rω<br />
sinωt<br />
⎟ = M ⎜<br />
0<br />
⎟<br />
⎜ ⎟ ⎜<br />
⎟ ⎜ 2 2<br />
2 2<br />
⎟<br />
⎝ 0 ⎠ ⎝ 0 ⎠ ⎝−<br />
r ω cosωt<br />
sinωt<br />
+ r ω sinωt<br />
cosωt<br />
= 0⎠<br />
,<br />
2<br />
⎛ry<br />
+ rz<br />
t ⎜<br />
I = M ⎜ − rxry<br />
⎜<br />
⎝ − rxr<br />
z<br />
2<br />
− r r<br />
r<br />
2<br />
x<br />
x y<br />
2<br />
z<br />
+ r<br />
− r r<br />
y<br />
z<br />
2 2<br />
− rxrz<br />
⎞ ⎛ r sin ωt<br />
⎟ ⎜<br />
2<br />
− ryrz<br />
⎟ = M ⎜−<br />
r sinωt<br />
cosωt<br />
2 2<br />
r + r<br />
⎟ ⎜<br />
x y ⎠ ⎝ 0<br />
0 ⎞<br />
⎟<br />
0 ⎟ .<br />
2<br />
r<br />
⎟<br />
⎠<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 11<br />
− r<br />
2<br />
r<br />
sinωt<br />
cosωt<br />
Der Trägheitstensor besteht nur aus der zz-Komponente als zeitlich stabile Größe, während<br />
die anderen Komponenten nur zeitweise auftreten und für den Bewegungsvorgang nicht<br />
maßgebend sind. Das Trägheitsmoment eines einzelnen Massepunktes ist daher Mr 2 , wobei r<br />
den Normalabstand zur Drehachse bedeutet. Die Kreisfrequenz hat nur eine z-Komponente,<br />
da nur der Winkel des Massepunktes in der x-y-Ebene sich ändert:<br />
⎛ 0 ⎞<br />
r ⎜ ⎟<br />
ω = ⎜ 0 ⎟ , mit ϕ = ωt<br />
+ ϕ 0 .<br />
⎜ ⎟<br />
⎝ω<br />
= & ϕ ⎠<br />
Die weiteren Größen ergeben sich zu:<br />
2<br />
cos<br />
0<br />
2<br />
ωt
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
⎛r<br />
cosωt<br />
⎞ ⎛− rω<br />
sinωt<br />
⎞ ⎛ 0 ⎞<br />
r r r r r ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ t r<br />
l = r × p = r × Mv<br />
= ⎜ r sinωt<br />
⎟ × M ⎜ rω<br />
cosωt<br />
⎟ = M ⎜ 0 ⎟ = Iω<br />
.<br />
⎜ ⎟ ⎜ ⎟ ⎜ 2<br />
r ω ⎟<br />
⎝ 0 ⎠ ⎝ 0 ⎠ ⎝ ⎠<br />
Zur Vereinfachung ist in nachstehender Tabelle nochmals die Analogie zwischen den<br />
einzelnen Größen angegeben:<br />
lineare Bewegung Rotation Zusammenhang<br />
x r , Ort<br />
v x&<br />
r r = , Geschwindigkeit<br />
b &x & r<br />
ϕ<br />
r<br />
= , Beschleunigung<br />
r , Winkel<br />
ω & ϕ<br />
r r = ,<br />
Winkelgeschwindigkeit<br />
ϕ& &r r r r r<br />
dx<br />
= dϕ<br />
× r + dr<br />
v r r&<br />
, Winkelbeschleunigung<br />
r r r r<br />
= ω × + ,<br />
b r r &r & r<br />
r<br />
&r r r<br />
= ω × + ω × &r<br />
+<br />
F r , Kraft T r , Drehmoment<br />
M , Masse I t , Trägheitsmoment<br />
p r , Impuls<br />
2<br />
⎛ry<br />
+ rz<br />
⎜<br />
M ⎜ − rxr<br />
y<br />
⎜<br />
⎝ − rxrz<br />
2<br />
− r r<br />
r<br />
2<br />
x<br />
+ r<br />
− r r<br />
− r r<br />
− r r<br />
r r r<br />
T = r × F<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 12<br />
x y<br />
2<br />
z<br />
y<br />
z<br />
r<br />
2<br />
x<br />
x<br />
z<br />
y z<br />
2<br />
y<br />
+ r<br />
⎞<br />
⎟<br />
⎟<br />
⎟<br />
⎠<br />
bzw. in einfachen Systemen<br />
wo I diagonal: I = M r<br />
2<br />
l r , Drehimpuls<br />
F Mb<br />
p&<br />
r r r<br />
= =<br />
ω & ω<br />
r<br />
r &r &t r t<br />
T = l = I + I<br />
∑ i<br />
Fi r<br />
= 0<br />
∑ i<br />
Ti r<br />
= 0<br />
8.2.3. Beispiel <strong>Atwood´sche</strong> <strong>Fallmaschine</strong><br />
αα<br />
α<br />
r r r t r<br />
M r × ω × r = Iω<br />
r r r r r<br />
l = r × p = r × Mv<br />
=<br />
r r r t r<br />
= r × Mω<br />
× r = Iω<br />
Die Atwood'sche <strong>Fallmaschine</strong> (siehe Abb.1) benützt zwei Gewichtsmassen M1 < M2, welche<br />
durch einen Faden über eine Rolle miteinander verbunden sind. Es wirkt nur mehr die<br />
Differenz der beiden Gewichte als antreibende Kraft, während die träge Masse als die<br />
Summe beider Gewichtsmassen auftritt. Wird der Faden und das Rad als masselos betrachtet<br />
erhält man folgende einfache Bewegungsgleichung:<br />
− gM = ( M + M )b,<br />
gM 2 1 1 2<br />
woraus sofort folgt:<br />
b = &<br />
M<br />
− M<br />
2 1<br />
& x = g .<br />
M1<br />
+ M 2
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Zunächst berücksichtigen wir die Masse Mr der Umlenkrolle, was zu einem zusätzlichen<br />
trägen Verhalten über das Trägheitsmoment der Rolle Ir führt. Weiters ist die<br />
Winkeländerung dϕ der Rolle mit der Ortsänderung dx=rdϕ beider Massen gekoppelt. Wir<br />
stellen wiederum die Kräftegleichung auf, indem wir berücksichtigen, dass die Rolle ein<br />
Drehmoment der Trägheit:<br />
T<br />
r<br />
I r<br />
= rFr<br />
= I & &<br />
rϕ<br />
= x&<br />
r<br />
ausübt. Damit erhalten wir:<br />
gM<br />
2<br />
I r<br />
− gM 1 = ( M 1 + M 2 ) b + b , 2<br />
r<br />
und somit als Beschleunigung:<br />
b = &<br />
M<br />
− M<br />
2 1<br />
& x = g<br />
.<br />
I r<br />
M1<br />
+ M 2 + 2<br />
r<br />
Ist die Rolle als Zylinderscheibe anzusehen, so ist ihr Trägheitsmoment bezüglich der<br />
2<br />
M rr<br />
Zylinderachse I r = und wir erhalten:<br />
2<br />
M 2 − M 1<br />
b = & x&<br />
= g<br />
.<br />
M r<br />
M 1 + M 2 +<br />
2<br />
Zuletzt soll nur noch kurz der Fall eines nicht masselosen Fadens diskutiert und die dabei auftretende<br />
Bewegungsgleichung angeschrieben werden. Zunächst erhöht sich das Trägheitsmoment der Umlenkrolle, da<br />
noch zusätzlich die Masse des Fadens, der über die obere Hälfte des Rades geleitet ist, dazugezählt werden<br />
muss. Wir bezeichnen mit I dieses erhöhte Trägheitsmoment. Weiters trägt mit der Länge l2(0)+x der Faden an<br />
der Masse M2 mit seinem Gewicht zur antreibenden Kraft bei, während der Faden an M1 mit l1(0)-x=l0-l2(0)-x<br />
die antreibende Kraft vermindert. Zusätzliche erhöht die Länge des frei hängenden Fadens l0 die wirkende träge<br />
Masse. Nehmen wir eine Masse des Fadens Mf=ρfl, welche proportional zu seiner Länge l ist, so erhalten wir als<br />
Bewegungsgleichung:<br />
gM<br />
2<br />
I r<br />
+ gρ<br />
( l x)<br />
gM g ( l l x)<br />
( M M l ) & f<br />
f<br />
f x&<br />
&x<br />
&<br />
2(<br />
0)<br />
+ − 1 − ρ 0 − 2(<br />
0)<br />
− = 1 + 2 + ρ 0 + . 2<br />
r<br />
Etwas übersichtlicher lautet die Differentialgleichung:<br />
⎛<br />
⎜<br />
⎝<br />
( M − M + ( 2l<br />
( 0)<br />
− ) )<br />
I ⎞<br />
+ + ρ + & x&<br />
+ 2g x = g<br />
ρ 2 l0<br />
.<br />
r ⎠<br />
M 1 M 2 f l0<br />
2 ⎟ ρ f<br />
2 1 f<br />
Diese kann durch zweifache Integration gelöst werden:<br />
l2<br />
x<br />
∫ ∫<br />
l2(<br />
0)<br />
l2(<br />
0)<br />
g<br />
I<br />
M 1 + M 2 + ρ f l0<br />
+<br />
t t<br />
2<br />
r<br />
2<br />
d t .<br />
2<br />
d x =<br />
( M − M + ρ ( 2l ( 0)<br />
− l ) ) − 2gρ<br />
x ∫∫<br />
2<br />
1<br />
f<br />
2<br />
0<br />
f<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 13<br />
0 0
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Die erste Integration liefert:<br />
l2<br />
∫<br />
l2<br />
( 0)<br />
M<br />
−<br />
1<br />
I<br />
+ M 2 + ρ f l0<br />
+ 2<br />
r<br />
⎛ g 2 1<br />
ln⎜<br />
2gρ ⎜<br />
f ⎝ g 2 1 ρ f<br />
Nach der 2. Integration erhält man:<br />
⎛<br />
⎜ M<br />
⎝<br />
mit<br />
X<br />
1<br />
+ M<br />
g<br />
2<br />
+ ρ l<br />
f<br />
0<br />
I ⎞<br />
+ ( )<br />
2 ⎟g<br />
M 2 − M 1 − ρ f l0<br />
r ⎠<br />
2 ( 2gρ<br />
)<br />
( M − M + ρ ( 2l<br />
( 0)<br />
− l ) )<br />
f<br />
2 1 f 2 0<br />
f<br />
= .<br />
g(<br />
M 2 − M 1 − ρ f l0<br />
)<br />
( M − M + ρ ( 2l<br />
( 0)<br />
− l ) )<br />
− 2gρ<br />
x<br />
− 2gρ<br />
x ⎞<br />
f 2 0<br />
f ⎟dx<br />
=<br />
( M − M − l ) ⎟ ∫<br />
( X ln X − X )<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 14<br />
0<br />
l2<br />
l2<br />
( 0)<br />
2<br />
t<br />
=<br />
2<br />
Für M1=M2=0 stellt dies das Ergebnis einer über eine Rolle hinunterfallenden Kette dar. Das Trägheitsmoment<br />
von Rad und Faden ergibt sich zu:<br />
r<br />
2<br />
2<br />
I = M r<br />
2<br />
+ πrρ<br />
f r .<br />
I M r<br />
Daraus ergibt sich = + πrρ<br />
f .<br />
2<br />
r 2<br />
Für eine weitere Analyse des massebehafteten Fadens empfiehlt sich die numerische Behandlung am Computer.<br />
Analyse des Bewegungsvorganges unter Berücksichtigung von Reibung<br />
Wir gehen von der Atwood’schen <strong>Fallmaschine</strong> aus, deren Weg-Zeit-Diagramm in den<br />
Computer eingelesen werden kann und dort zur weiteren Analyse zur Verfügung steht. Die<br />
beiden Masse wurden dabei in diesem Beispiel zu M1=0,80 kg und M2=0,87 kg bestimmt.<br />
Die Masse der drehenden Scheibe soll 0,13 kg betragen. Dies ergibt eine theoretische<br />
M 2 − M 1<br />
0,<br />
87 − 0,<br />
8<br />
Beschleunigung von b = g<br />
= 9,<br />
81<br />
m/s<br />
M r<br />
M + M +<br />
0,<br />
8 + 0,<br />
87 + 0,<br />
065<br />
2 = 0,396 m/s 2 . Die<br />
1<br />
2<br />
2<br />
Randbedingungen werden im Experiment so gesetzt, dass am Ort s0 = 0 m mit der<br />
Anfangsgeschwindigkeit v0 = 0 m/s der Bewegungsvorgang gestartet wird. Allerdings kann<br />
die Datenerfassung von Ort und Zeit erst etwas verspätet mit t0 = -0,5 s gestartet werden.<br />
Theoretisch erwartet man daher folgende Abhängigkeit des Weges von der Zeit:<br />
⎠<br />
t<br />
0<br />
tdt .<br />
2<br />
2 3 2<br />
( ) ( 0 ) 0(<br />
0 ) 2 0 t0<br />
2<br />
2<br />
2<br />
b<br />
b<br />
b<br />
s t = t − t − bt t − t = t − bt t + = 0,198 t 2 + 0,396 t + 0,1485 m.<br />
Dieser theoretisch erwartete Verlauf ist in Abb.2 zusammen mit dem tatsächlich gemessenen<br />
Werten verglichen.
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Weg s [m]<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
experimentell<br />
theoretisch<br />
Y =0.1485+0.396 X+0.198 X 2<br />
Y =0.02734+0.11245 X+0.10874 X 2<br />
-0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4<br />
Zeit t [s]<br />
-0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 15<br />
Geschwindigkeit v [m/s]<br />
2.4<br />
2.2<br />
2.0<br />
1.8<br />
1.6<br />
1.4<br />
1.2<br />
1.0<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0.0<br />
experimentell<br />
theoretisch<br />
Y =0.198+0.396 X<br />
Zeit t [s]<br />
Y =0.11231+0.21758 X<br />
Abb.2: Weg-Zeit Diagramm Abb.3: Geschwindigkeits-Zeit-Diagramm<br />
Dabei treten erhebliche Abweichungen zwischen dem theoretisch erwarteten Verhalten und<br />
den tatsächlichen Messwerten auf. Offenbar ist die tatsächliche Beschleunigung etwa nur die<br />
Hälfte. Um die Ursache dafür etwas näher zu ergründen, empfiehlt es sich die weiteren<br />
Zusammenhänge anzuschauen, wie sie in den Abb.3 bis Abb.6 dargestellt sind. Dabei erhält<br />
man Geschwindigkeit und Beschleunigung aus den experimentellen Werten durch<br />
numerisches Differenzieren. Zu beachten ist, dass durch die experimentellen<br />
Ungenauigkeiten (ebenso wie durch mangelnde numerische Genauigkeit in der<br />
Datenerfassung) das eigentliche Messsignal durch starke Schwankungen (Rauschen)<br />
überlagert ist, was vor allem bei den höheren Ableitungen besonders stark zu tragen kommt.<br />
Beschleunigung b [m/s 2 ]<br />
Beschleunigung b [m/s 2 ]<br />
0.50<br />
0.45<br />
0.40<br />
0.35<br />
0.30<br />
0.25<br />
0.20<br />
0.15<br />
0.10<br />
0.05<br />
0.00<br />
experimentell<br />
theoretisch<br />
Y =0.396<br />
Y =0.21836-0.00114 X<br />
-0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4<br />
Zeit t [s]<br />
Beschleunigung b [m/s 2 ]<br />
0.50<br />
0.45<br />
0.40<br />
0.35<br />
0.30<br />
0.25<br />
0.20<br />
0.15<br />
0.10<br />
0.05<br />
experimentell<br />
theoretisch<br />
Y =0.396<br />
Y =0.221-0.01444 X<br />
0.00<br />
0.0 0.2 0.4 0.6 0.8 1.0<br />
Weg s [m]<br />
Abb.4: Beschleunigungs-Zeit-Diagramm Abb.5: Beschleunigungs-Weg-Diagramm<br />
0.50<br />
0.45<br />
0.40<br />
0.35<br />
0.30<br />
0.25<br />
0.20<br />
0.15<br />
0.10<br />
0.05<br />
0.00<br />
experimentell<br />
theoretisch<br />
Y =0.396<br />
Y =0.21955-0.00703 X<br />
0.2 0.3 0.4 0.5<br />
Geschwindigkeit v [m/s]<br />
Abb.6: Beschleunigungs-Geschwindigkeits-<br />
Diagramm<br />
Kraft F [N]<br />
1.0<br />
0.9<br />
0.8<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0.0<br />
experimentell<br />
theoretisch<br />
Y =0.687<br />
Y =0.38092-0.01221 X<br />
0.2 0.3 0.4 0.5<br />
Geschwindigkeit v [m/s]<br />
Abb.7: Kraft-Geschwindigkeits-Diagramm
<strong>KFU</strong>G, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I<br />
Von besonderer Bedeutung sind hierbei vor allem die verschiedenen Beschleunigungs-<br />
Diagramme, da sie den Hinweis liefern, ob tatsächlich die angenommene gleichförmig<br />
beschleunigte Bewegung vorliegt. Leider ist hier jedoch, bedingt durch die zweiten<br />
Ableitungen, die Genauigkeit sehr stark eingeschränkt. Dies ist in unserem Beispiel durch die<br />
zu geringe numerische Auflösung der Ortsdaten bedingt. Man erkennt eine in Zeit, Ort und<br />
Geschwindigkeit einigermaßen konstante Beschleunigung mit leichter Tendenz zur<br />
Abnahme. Ob diese Abnahme nun wirklich durch eine orts-, zeit- oder<br />
geschwindigkeitsabhänge Größe verursacht wurde lässt sich aus diesen Diagrammen alleine<br />
jedoch nicht verifizieren (selbst bei besserer Genauigkeit der Messdaten nicht). Erst wenn<br />
der Versuch unter veränderten Randbedingungen (Wiederholung zu anderer Zeit t0, Start des<br />
Bewegungsvorganges an einem anderen Ort s0 und starten mit einer anderen<br />
Anfangsgeschwindigkeit v0) durchgeführt wird, könnte man erkennen, dass der<br />
Bewegungsablauf unabhängig vom gewählten Zeitpunkt oder dem Anfangsort ist, jedoch<br />
nicht von der gewählten Anfangsgeschwindigkeit. Somit muss noch eine weitere Kraft<br />
vorhanden sein, welche leicht von der Geschwindigkeit abhängt. Die für die Änderung des<br />
Bewegungszustandes verantwortliche Gesamtkraft erhalten wir, wenn wir die experimentell<br />
bestimmte Beschleunigung mit der gesamt wirkenden trägen Masse multiplizieren. In<br />
M r<br />
unserem Beispiel ist die gesamte träge Masse M = M + M + = 1,735 kg. Damit<br />
erhalten wir das in Abb.7 dargestellte Verhalten der gesamten wirkenden Kraft als Funktion<br />
der Geschwindigkeit. Die Diskrepanz zwischen der aus der Massendifferenz bisher<br />
berechneten antreibenden Kraft und der tatsächlich wirkenden Kraft wird als die zusätzliche<br />
Reibungskraft FR = 0,306 (±0,015) + 0,01(±0,04) v ermittelt. Dabei ist die Geschwindigkeit<br />
in m/s einzusetzen und die Kraft erhält man in Newton. Die in Klammer angegebenen Werte<br />
geben den Genauigkeitsbereich der einzelnen Parameter an, wie sie bessere Fitroutinen aus<br />
der Streuung der Messwerte als Standardabweichungen berechnen. Demnach liegt eine auf<br />
ca. 3% genau bestimmte geschwindigkeitsunabhängige Reibungskraft von 0,3 N vor,<br />
während die Geschwindigkeitsabhängigkeit durch einen Koeffizienten zwischen –0,03 und<br />
+0,05 Ns/m beschrieben wird. Ob dies den tatsächlichen Verhältnissen entspricht lässt sich<br />
in diesem Fall sehr leicht nachprüfen, da in den vorigen Abbildungen keine echten<br />
Messdaten verwendet wurden sondern eine Simulation, welche jedoch auch die Streuung der<br />
Messdaten und die geringe numerische Auflösung berücksichtigt. Diese Simulation wurde<br />
mit eine Reibungskraft FR = 0,3 + 0,03 v durchgeführt, was mit den in unserer Analyse<br />
ermittelten Wertbereichen übereinstimmt.<br />
Eine Verbesserung der beschriebenen Analyse müsste in einer Erhöhung der Genauigkeit der<br />
Ortsdaten ansetzen, um so zu verlässlicheren Beschleunigungswerten zu kommen. Dann ist<br />
auch die Durchführung mit geänderten Anfangsbedingungen sinnvoll, welche zur<br />
Charakterisierung der auftretenden Kräfte notwendig ist. Zwar scheint auch die künstliche<br />
Glättung (Smoothing) der Geschwindigkeitskurve eine effektive Alternative darzustellen,<br />
allerdings ist dies mit einer künstlichen Manipulation und Veränderung der Messdaten<br />
verbunden, wodurch die statistische Aussagekraft einer Nachfolgenden Fit-Methode verloren<br />
geht bzw. stark beeinträchtigt wird. Besser ist hier geschickte numerische<br />
Differenziermethoden anzuwenden, welche ein breites Datenintervall betrachten. Allerdings<br />
wird dann die Information an den Datenrändern (Beginn und Ende) stark eingeengt, wodurch<br />
ebenfalls wieder keine gute statistische Genauigkeit über den Anstieg der Fit-Kurve erzielbar<br />
ist. Letztlich gilt wie immer der Grundsatz, daß Information, welche nicht schon<br />
ursprünglich in den Messdaten vorhanden ist, auch nicht mit noch so hohen Aufwand im<br />
„smoothing“ oder „fitten“ herbeigezaubert werden kann.<br />
9. Experimentpate: P.Knoll<br />
P.Knoll, <strong>Atwood´sche</strong> <strong>Fallmaschine</strong> 16<br />
T<br />
1<br />
2<br />
2