

Diplomarbeit - Labor für künstliche Intelligenz - Fachhochschule ...
Diplomarbeit - Labor für künstliche Intelligenz - Fachhochschule ...
Diplomarbeit - Labor für künstliche Intelligenz - Fachhochschule ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5 Tutorial Teil 1: Bauanleitung eines AMS<br />
Abbildung 5.22: Sensorinterface zur Linienverfolgung, Variante 1<br />
Mit einem Versuchsaufbau, bei dem ein Blatt Papier mit einer Linie(14 mm breit) um<br />
je 1 mm am Sensorinterface vorbei geführt wurde, entstand das Diagramm von Abbildung<br />
5.24. Das entsprechende Testprogramm befindet sich im Anhang C.1. Bei jedem<br />
Millimeter Vorrücken werden die Sensordaten über die serielle Schnittstelle ausgegeben.<br />
Über das HyperTerminal von Microsoft können diese empfangen und an geeigneter Stelle<br />
weiter verarbeitet werden.<br />
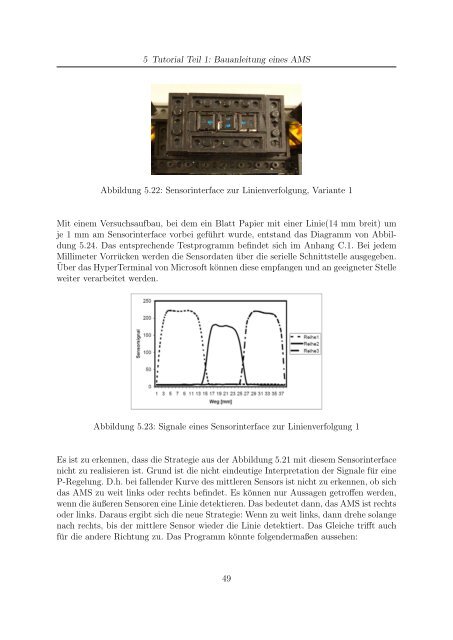
Abbildung 5.23: Signale eines Sensorinterface zur Linienverfolgung 1<br />
Es ist zu erkennen, dass die Strategie aus der Abbildung 5.21 mit diesem Sensorinterface<br />
nicht zu realisieren ist. Grund ist die nicht eindeutige Interpretation der Signale <strong>für</strong> eine<br />
P-Regelung. D.h. bei fallender Kurve des mittleren Sensors ist nicht zu erkennen, ob sich<br />
das AMS zu weit links oder rechts befindet. Es können nur Aussagen getroffen werden,<br />
wenn die äußeren Sensoren eine Linie detektieren. Das bedeutet dann, das AMS ist rechts<br />
oder links. Daraus ergibt sich die neue Strategie: Wenn zu weit links, dann drehe solange<br />
nach rechts, bis der mittlere Sensor wieder die Linie detektiert. Das Gleiche trifft auch<br />
<strong>für</strong> die andere Richtung zu. Das Programm könnte folgendermaßen aussehen:<br />
49







