Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ...
Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ... Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ...
86 Differentialgeometrie 4.1.2 Karten Im R n sind wir gewohnt, Punkte durch Angabe eines Vektors in einem bestimmten Koordinatensystem zu charakterisieren, wir sagen z.B. dass sich ein Teilchen am Ort x ∈ R n befindet. Gleiches gilt für den Minkowskiraum der speziellen Relativitätstheorie, in dem Ereignisse (Punkte) durch Vierervektoren repräsentiert werden. Auf einer Mannigfaltigkeit ist es dagegen nicht so einfach, die Lage eines Punktes zu beschreiben. Wenn ein Einbettungsraum zur Verfügung steht, kann man zwar weiterhin Vektoren benutzen, z.B. kann man die Oberfläche einer Kugel durch die Menge der Vektoren {r} mit ||r−r0|| = R beschreiben, die vom Mittelpunkt zur Oberfläche zeigen. Will man jedoch auf einen umgebenden Einbettungsraum verzichten, versagt dieses Konzept, z.B. liegt der Mittelpunkt einer Kugel außerhalb ihrer Oberfläche. Die Vektoren müssten gewissermaßen innerhalb der Mannigfaltigkeit definiert sein, doch wie soll man mit verbogenen Vektoren arbeiten? Um dieses Problem zu umgehen, bildet man die Mannigfaltigkeit auf Karten ab, ähnlich wie die Erdoberfläche auf Landkarten abgebildet wird. Da die Mannigfaltigkeit auf kurzen Distanzen annähernd eben ist, gibt es nämlich zu jedem Punkt p ∈ M eine Umgebung U(p) ⊂ M mit einer Abbildung ϕ : U → R n . Eine solche Karte wird auch als lokales Koordinatensystem bezeichnet. Oft reicht eine einzige Karte nicht aus, um die gesamte Mannigfaltigkeit abzubilden, man braucht deshalb eine Kollektion mehrerer sich überlappender Karten, mit der die gesamte Mannigfaltigkeit abgedeckt wird. Eine solche Kollektion nennt man einen Atlas. Genauer: Eine Karte (auch lokales Koordinatensystem genannt) ist definiert als ein Paar (U,ϕ) bestehend aus einer offenen Teilmenge U ⊂ M und einem Homöomorphismus ϕ : U → R n . Eine Menge heißt offen. wenn es zu jedem Punkt p ∈ U eine Umgebung gibt, die vollständig in U liegt, wenn U also gewissermaßen keinen Rand hat. Eine Menge {Ui} von offenen Teilmengen von M heißt offene Überdeckung von M , wenn � iUi = M ist. Mit der Offenheit wird sichergestellt, dass aneinandergrenzende Teilmengen überlappen, also eine nicht-leere Schnittmenge besitzen. Eine Kollektion von Karten {(Uiϕi)}, deren Teilmengen Ui die Mannigfaltigkeit M offen überdecken, heißt Atlas von M . Atlanten geben uns also die Möglichkeit, eine n-dimensionale Mannigfaltigkeit auf Teilgebiete des R n abzubilden und damit auf gewohnte Weise darzustellen. Atlanten sind nicht eindeutig, da es unendlich viele mögliche Projektionen und Aufteilungen gibt. Will man also eine abstrakte Eigenschaft einer Mannigfaltigkeit mit Hilfe von Karten berechnen, muss das Ergebnis von der gewählten Darstellung unabhängig sein, also für alle Atlanten übereinstimmen. Bereits die Kugeloberfläche S 2 ⊂ R 3 lässt sich nicht mit einer einzigen Karte abbilden, sondern man benötigt mindestens zwei Karten, z.B. für die Nord- und Südhalbkugel. In der Differentialgeometrie sind aneinandergrenzende Karten so beschaffen, dass sie überlappen. Diese Überlapplungsgebiete stellen sicher, dass man auf einfache Weise von einer Karte zur anderen wechseln kann. Mit Kartenwechseln werden wir uns im folgenden Abschnitt auseinandersetzen. Haye Hinrichsen — Allgemeine Relativitätstheorie
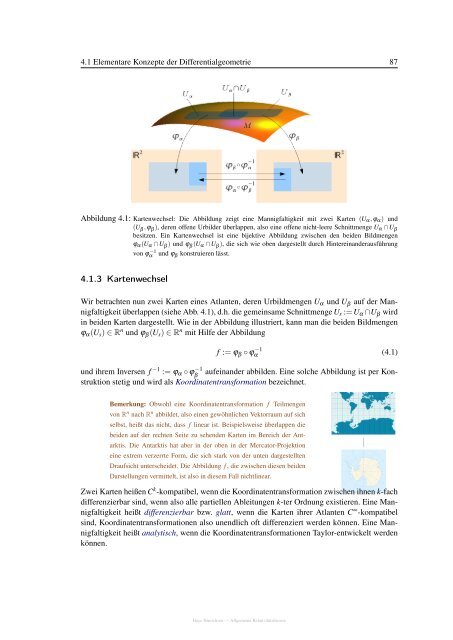
4.1 Elementare Konzepte der Differentialgeometrie 87 Abbildung 4.1: Kartenwechsel: Die Abbildung zeigt eine Mannigfaltigkeit mit zwei Karten (Uα,ϕα) und (U β ,ϕ β ), deren offene Urbilder überlappen, also eine offene nicht-leere Schnittmenge Uα ∩U β besitzen. Ein Kartenwechsel ist eine bijektive Abbildung zwischen den beiden Bildmengen ϕα(Uα ∩U β ) und ϕ β (Uα ∩U β ), die sich wie oben dargestellt durch Hintereinanderausführung von ϕ −1 α und ϕ β konstruieren lässt. 4.1.3 Kartenwechsel Wir betrachten nun zwei Karten eines Atlanten, deren Urbildmengen Uα und U β auf der Mannigfaltigkeit überlappen (siehe Abb. 4.1), d.h. die gemeinsame Schnittmenge Us := Uα ∩U β wird in beiden Karten dargestellt. Wie in der Abbildung illustriert, kann man die beiden Bildmengen ϕα(Us) ∈ R n und ϕ β (Us) ∈ R n mit Hilfe der Abbildung f := ϕ β ◦ ϕ −1 α und ihrem Inversen f −1 := ϕα ◦ ϕ −1 β aufeinander abbilden. Eine solche Abbildung ist per Konstruktion stetig und wird als Koordinatentransformation bezeichnet. Bemerkung: Obwohl eine Koordinatentransformation f Teilmengen von R n nach R n abbildet, also einen gewöhnlichen Vektorraum auf sich selbst, heißt das nicht, dass f linear ist. Beispielsweise überlappen die beiden auf der rechten Seite zu sehenden Karten im Bereich der Ant- arktis. Die Antarktis hat aber in der oben in der Mercator-Projektion eine extrem verzerrte Form, die sich stark von der unten dargestellten Draufsicht unterscheidet. Die Abbildung f , die zwischen diesen beiden Darstellungen vermittelt, ist also in diesem Fall nichtlinear. Zwei Karten heißen C k -kompatibel, wenn die Koordinatentransformation zwischen ihnen k-fach differenzierbar sind, wenn also alle partiellen Ableitungen k-ter Ordnung existieren. Eine Mannigfaltigkeit heißt differenzierbar bzw. glatt, wenn die Karten ihrer Atlanten C ∞ -kompatibel sind, Koordinatentransformationen also unendlich oft differenziert werden können. Eine Mannigfaltigkeit heißt analytisch, wenn die Koordinatentransformationen Taylor-entwickelt werden können. Haye Hinrichsen — Allgemeine Relativitätstheorie (4.1)
- Seite 44 und 45: 36 Differentialformen Eine faktoris
- Seite 46 und 47: 38 Differentialformen 2.1.8 Darstel
- Seite 48 und 49: 40 Differentialformen Um das Hodge-
- Seite 50 und 51: 42 Differentialformen Bemerkung: Si
- Seite 52 und 53: 44 Differentialformen 2.2.7 Eigensc
- Seite 54 und 55: 46 Differentialformen symmetrischen
- Seite 56 und 57: 48 Differentialformen Tangentialrau
- Seite 58 und 59: 50 Differentialformen Abbildung 2.3
- Seite 60 und 61: 52 Differentialformen Abbildung 2.4
- Seite 62 und 63: 54 Differentialformen TpU T ∗ p U
- Seite 64 und 65: 56 Differentialformen 2.4.1 Verallg
- Seite 66 und 67: 58 Differentialformen lässt sich a
- Seite 68 und 69: 60 Differentialformen Die nebensteh
- Seite 70 und 71: 62 Differentialformen von p Variabl
- Seite 73 und 74: 3 Spezielle Relativitätstheorie Di
- Seite 75 und 76: 3.1 Nichtrelativistische Mechanik 6
- Seite 77 und 78: 3.1 Nichtrelativistische Mechanik 6
- Seite 79 und 80: 3.1 Nichtrelativistische Mechanik 7
- Seite 81 und 82: 3.2 Spezielle Relativitätstheorie
- Seite 83 und 84: 3.2 Spezielle Relativitätstheorie
- Seite 85 und 86: 3.2 Spezielle Relativitätstheorie
- Seite 87 und 88: 3.2 Spezielle Relativitätstheorie
- Seite 89 und 90: 3.3 Relativistische Mechanik 81 gle
- Seite 91: 3.3 Relativistische Mechanik 83 Die
- Seite 96 und 97: 88 Differentialgeometrie Abbildung
- Seite 98 und 99: 90 Differentialgeometrie Bemerkung:
- Seite 100 und 101: 92 Differentialgeometrie Die Lie-Kl
- Seite 102 und 103: 94 Differentialgeometrie Abbildung
- Seite 104 und 105: 96 Differentialgeometrie Transforma
- Seite 106 und 107: 98 Differentialgeometrie 4.2.7 Kova
- Seite 108 und 109: 100 Differentialgeometrie Beweis: W
- Seite 110 und 111: 102 Differentialgeometrie Diese Än
- Seite 112 und 113: 104 Differentialgeometrie Abbildung
- Seite 114 und 115: 106 Differentialgeometrie • Antis
- Seite 117 und 118: 5 Elektrodynamik als Eichtheorie Di
- Seite 119 und 120: 5.1 U(1)-Eichtheorie 111 3. Bei Com
- Seite 121 und 122: 5.1 U(1)-Eichtheorie 113 Dabei ist
- Seite 123 und 124: 5.1 U(1)-Eichtheorie 115 Rate der V
- Seite 125 und 126: 5.2 Elektrodynamik im Vakuum 117 Ve
- Seite 127 und 128: 5.3 Elektrodynamik in Differentialf
- Seite 129 und 130: 6 Feldgleichen der Allgemeinen Rela
- Seite 131 und 132: 6.1 Konzept der Allgemeinen Relativ
- Seite 133 und 134: 6.1 Konzept der Allgemeinen Relativ
- Seite 135 und 136: 6.1 Konzept der Allgemeinen Relativ
- Seite 137 und 138: 6.1 Konzept der Allgemeinen Relativ
- Seite 139 und 140: 6.2 Feldgleichungen 131 diese Denkw
- Seite 141 und 142: 6.2 Feldgleichungen 133 Damit laute
- Seite 143 und 144: 6.2 Feldgleichungen 135 Warum benö
4.1 Elementare Konzepte der Differentialgeometrie 87<br />
Abbildung 4.1: Kartenwechsel: Die Abbildung zeigt eine Mannigfaltigkeit mit zwei Karten (Uα,ϕα) <strong>und</strong><br />
(U β ,ϕ β ), deren offene Urbilder überlappen, also eine offene nicht-leere Schnittmenge Uα ∩U β<br />
besitzen. Ein Kartenwechsel ist eine bijektive Abbildung zwischen den beiden Bildmengen<br />
ϕα(Uα ∩U β ) <strong>und</strong> ϕ β (Uα ∩U β ), die sich wie oben dargestellt durch Hintereinanderausführung<br />
von ϕ −1<br />
α <strong>und</strong> ϕ β konstruieren lässt.<br />
4.1.3 Kartenwechsel<br />
Wir betrachten nun zwei Karten eines Atlanten, deren Urbildmengen Uα <strong>und</strong> U β auf der Mannigfaltigkeit<br />
überlappen (siehe Abb. 4.1), d.h. die gemeinsame Schnittmenge Us := Uα ∩U β wird<br />
in beiden Karten dargestellt. Wie in der Abbildung illustriert, kann man die beiden Bildmengen<br />
ϕα(Us) ∈ R n <strong>und</strong> ϕ β (Us) ∈ R n mit Hilfe der Abbildung<br />
f := ϕ β ◦ ϕ −1<br />
α<br />
<strong>und</strong> ihrem Inversen f −1 := ϕα ◦ ϕ −1<br />
β aufeinander abbilden. Eine solche Abbildung ist per Konstruktion<br />
stetig <strong>und</strong> wird als Koordinatentransformation bezeichnet.<br />
Bemerkung: Obwohl eine Koordinatentransformation f Teilmengen<br />
von R n nach R n abbildet, also einen gewöhnlichen Vektorraum auf sich<br />
selbst, heißt das nicht, dass f linear ist. Beispielsweise überlappen die<br />
beiden auf der rechten Seite zu sehenden Karten im Bereich der Ant-<br />
arktis. Die Antarktis hat aber in der oben in der Mercator-Projektion<br />
eine extrem verzerrte Form, die sich stark von der unten dargestellten<br />
Draufsicht unterscheidet. Die Abbildung f , die zwischen diesen beiden<br />
Darstellungen vermittelt, ist also in diesem Fall nichtlinear.<br />
Zwei Karten heißen C k -kompatibel, wenn die Koordinatentransformation zwischen ihnen k-fach<br />
differenzierbar sind, wenn also alle partiellen Ableitungen k-ter Ordnung existieren. Eine Mannigfaltigkeit<br />
heißt differenzierbar bzw. glatt, wenn die Karten ihrer Atlanten C ∞ -kompatibel<br />
sind, Koordinatentransformationen also unendlich oft differenziert werden können. Eine Mannigfaltigkeit<br />
heißt analytisch, wenn die Koordinatentransformationen Taylor-entwickelt werden<br />
können.<br />
Haye Hinrichsen — Allgemeine <strong>Relativitätstheorie</strong><br />
(4.1)


