Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ...
Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ...
Relativitätstheorie - Fakultät für Physik und Astronomie - Universität ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
50 Differentialformen<br />
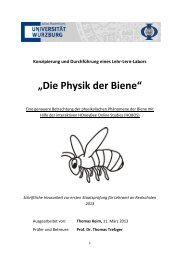
Abbildung 2.3: Ein Koordinatensystem S bildet die ‘Realität’ (links) bijektiv auf eine Karte (rechts) ab. Dazu<br />
wird jedem Punkt p ∈ U ein Punkt x ∈ R 2 auf der Karte zugeordnet. Dieses Beispiel zeigt die<br />
uns wohlbekannten Polarkoordinaten <strong>und</strong> veranschaulicht, wie ein ‘Haus vom Nikolaus’ auf der<br />
Karte dargestellt wird. Jeder Punkt p ∈ U wird dabe eindeutig auf x 1 = r <strong>und</strong> x 2 = ϕ abgebildet.<br />
Die Netzlinien erhält man, wenn man eine Koordinate variiert <strong>und</strong> die anderen festhält.<br />
Merke: Übersicht Notationen:<br />
f Funktion U− > R<br />
fp Funktionswert am Punkt p<br />
Xp Richtungsvektor im Punkt p<br />
Xp f Ableitung von f in Richtung X im Punkt p<br />
X Richtungsvektorfeld<br />
X f Ableitung von f entlang des Richtungsvektorfeldes<br />
d fp Differentialform von f im Punkt p, bildet Richtungsvektoren auf Zahlen ab<br />
d fp(Xp) Änderung von f in linearer Näherung in Richtung X<br />
d f Feld der Differentialformen von f auf U<br />
dxp Differentialform von x im Punkt p, bildet Richtungsvektoren auf Zahlen ab<br />
dx(X) Änderung der Koordinate x in linearer Näherung in Richtung X<br />
dxp(Xp) Änderung der Koordinate x in linearer Näherung in Richtung X im Punkt p<br />
2.3.3 Koordinatensysteme<br />
Ein Koordiantensystem S ist ein Satz von n stetig differenzierbaren Funktionen x i :U → R, die jedem<br />
Punkt p ∈ U auf eindeutige Weise Koordinaten x i (p) ∈ R zuordnen, wobei n wie immer die<br />
Dimension des Raums ist. Wenn man die Koordinaten x i (p) zu einem Vektor x(p) ∈ R n zusammenfasst,<br />
kann man ein Koordinatensystem auch als stetig differenzierbare Bijektion S : U → R n<br />
interpretieren, also gewissermaßen als invertierbare Abbildung vom physikalischen Raum auf<br />
eine Landkarte. Die dazu inverse Abbildung S −1 bezeichnen wir mit p(x) = p(x 1 ,...,x n ).<br />
Abb. 2.3 zeigt die uns wohlbekannten Polarkoordinaten. In diesem Koordinatensystem wird<br />
jedem Punkt p ∈ U ein Radius x 1 = r <strong>und</strong> ein Winkel x 2 = ϕ zugeordnet. Auf der entsprechenden<br />
Karte sieht die ‘Realität’, z.B. das links gezeigte Haus vom Nikolaus, stark verzerrt aus.<br />
Insbesondere scheinen die Kanten des Hauses gekrümmt zu sein.<br />
Ein Koordinatensystem stellt man wie in Abb. 2.3 durch ein Netz von Linien dar. Diese Linien<br />
erhält man, wenn man eine Koordinate variiert <strong>und</strong> die anderen dabei festhält. Ist p ∈U ein Punkt<br />
<strong>und</strong> x(p) der entsprechende Punkt auf der Karte, dann sind diese Linien durch<br />
c j(λ) = p(x 1 ,...,x j−1 , x j + λ ,x j+1 ,...,x n ) (2.72)<br />
Haye Hinrichsen — Allgemeine <strong>Relativitätstheorie</strong>