Co- Pilot von FMA auf deutsch übersetzt - Klaus-sander-web.com
Co- Pilot von FMA auf deutsch übersetzt - Klaus-sander-web.com
Co- Pilot von FMA auf deutsch übersetzt - Klaus-sander-web.com
- Keine Tags gefunden...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
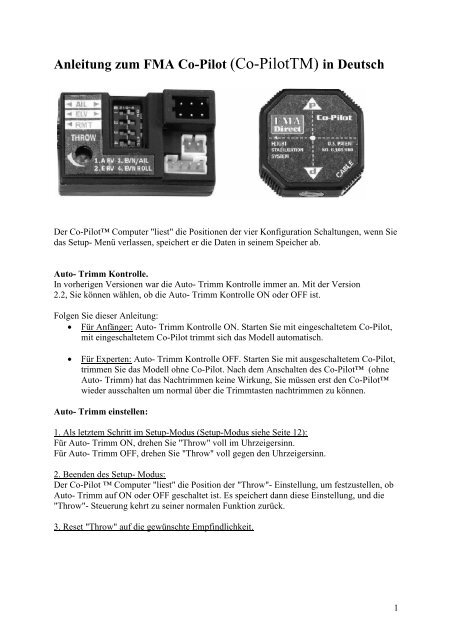
Anleitung zum <strong>FMA</strong> <strong>Co</strong>-<strong>Pilot</strong> (<strong>Co</strong>-<strong>Pilot</strong>TM) in DeutschDer <strong>Co</strong>-<strong>Pilot</strong> <strong>Co</strong>mputer "liest" die Positionen der vier Konfiguration Schaltungen, wenn Siedas Setup- Menü verlassen, speichert er die Daten in seinem Speicher ab.Auto- Trimm Kontrolle.In vorherigen Versionen war die Auto- Trimm Kontrolle immer an. Mit der Version2.2, Sie können wählen, ob die Auto- Trimm Kontrolle ON oder OFF ist.Folgen Sie dieser Anleitung:• Für Anfänger: Auto- Trimm Kontrolle ON. Starten Sie mit eingeschaltetem <strong>Co</strong>-<strong>Pilot</strong>,mit eingeschaltetem <strong>Co</strong>-<strong>Pilot</strong> trimmt sich das Modell automatisch.• Für Experten: Auto- Trimm Kontrolle OFF. Starten Sie mit ausgeschaltetem <strong>Co</strong>-<strong>Pilot</strong>,trimmen Sie das Modell ohne <strong>Co</strong>-<strong>Pilot</strong>. Nach dem Anschalten des <strong>Co</strong>-<strong>Pilot</strong> (ohneAuto- Trimm) hat das Nachtrimmen keine Wirkung, Sie müssen erst den <strong>Co</strong>-<strong>Pilot</strong>wieder ausschalten um normal über die Trimmtasten nachtrimmen zu können.Auto- Trimm einstellen:1. Als letztem Schritt im Setup-Modus (Setup-Modus siehe Seite 12):Für Auto- Trimm ON, drehen Sie "Throw" voll im Uhrzeigersinn.Für Auto- Trimm OFF, drehen Sie "Throw" voll gegen den Uhrzeigersinn.2. Beenden des Setup- Modus:Der <strong>Co</strong>-<strong>Pilot</strong> <strong>Co</strong>mputer "liest" die Position der "Throw"- Einstellung, um festzustellen, obAuto- Trimm <strong>auf</strong> ON oder OFF geschaltet ist. Es speichert dann diese Einstellung, und die"Throw"- Steuerung kehrt zu seiner normalen Funktion zurück.3. Reset "Throw" <strong>auf</strong> die gewünschte Empfindlichkeit.1
Tipp´s• Für eine konsistente <strong>Co</strong>-<strong>Pilot</strong> - Funktion, halten Sie die Sensor-Fenster sauber.Wenn die Fenster schmutzig sind, reinigen Sie diese mit Alkohol und einemWattestäbchen.• Einige Flugzeug- Modelle erfordern Änderungen an der <strong>Co</strong>-<strong>Pilot</strong> Einrichtung.• Montage der Sensor mit Velcro ® erfordert das Aufrauen derFlugzeug-Oberfläche mit Sandpapier den Velcro ® . Alternativ können Sie es aberauch mit einem doppelseitigen Schaub- Klebepad befestigen.Anbau und SetupDer Anbau kann je nach Modell abweichend sein.Der Sensor sollte immer mit freier Sicht na allen vier Sichtfenstern angebaut werden. Evtl. istein Podest (Baldrachin) notwendig.Mit folgenden Einstellungen können Sie entsprechende Änderungen vornehmen:InstallationSchritt 1: den besten Standort für Sensor festlegen (Oberseite desRumpf, hinter dem <strong>Co</strong>ckpit).Schritt 2: Montieren Sie den Sensor schräg hinter derBaldachin, wie rechts abgebildet.Schritt 3: schalten Sie die Schalter wie folgt:2
SetupSchritt 4:a. Schalten Sie den Sender an.b. Drücken Sie und halten Sie den Infrarotkalibrierungstaster.c. Mit dem noch gedrückten Taster, stecken Sie den Akku am Empfänger/ Regler.d. Die Rudermaschinen bewegen sich drei Mal, um anzuzeigen dass der <strong>Co</strong>- <strong>Pilot</strong> imSetup- Mode ist.Stellen Sie sich <strong>auf</strong> die rechte Seite des Flugzeuges, dann platzieren Sie IhreHand in der Nähe des rechten vorderen "P"- Fenster (dies simuliert dieFlugzeuge Pitching nach unten und Rollen nach rechts).Das rechte Querruder sollte nach unten und das Höhenruder sollte sich nach oben bewegen.Wenn die Ruder nicht in der gewünschten Richtung ausschlagen, ändern Sie die Schalter 1und / oder 2 <strong>auf</strong> der <strong>Co</strong>-<strong>Pilot</strong>, bis die Ruder sich in die richtige Richtung bewegen. Siehe Foto.3
Schritt 5:a. Drücken Sie die Infrarot-Calibration-Taster um den Roll- Setup- Modus zu ändern.b. Stellen Sie sich <strong>auf</strong> die rechten hinteren Teil ihres Flugzeuges, dann platzieren Sie IhreHand in der Nähe des rechten hinteren Sensor-Fenster (dies simuliertdas Flugzeug Pitching und rollt nach rechts).c. Das rechte Querruder sollte nach unten und das Höhenruder sollte nach unten gehen, wie<strong>auf</strong> dem Foto abgebildet. Wenn die Ruder sich in die falsche Richtung bewegen, ändern Sieden Schalter 4 <strong>auf</strong> dem <strong>Co</strong>-<strong>Pilot</strong> <strong>Co</strong>mputer (ändern Sie bei diesem Schritt nicht dieSchalter 1 oder 2).Schritt 6:Stellen Sie den „Throw“- Regler <strong>auf</strong> 50%.Schritt 7:Trennen Sie die Stromversorgung um die Einstellungen zu speichern.4
Benutzerhandbuch InfrarotflugstabilisierungssystemArbeitsweise des <strong>Co</strong>- <strong>Pilot</strong><strong>Co</strong>-<strong>Pilot</strong> verwendet patentierte Technologie, um den Unterschied der Temperatur zwischender Erde und dem Himmel per Infrarot zu fühlen. <strong>Co</strong>-<strong>Pilot</strong> verwendet zwei Paare <strong>von</strong>Infrarotsensoren:ein Paar für den Geradeausflug, und das andere Paar für Links und Rechts.Führen Sie eine Infrarotkalibrierung am Anfang jedes Fliegens durch. Wiederholung Sie dieKalibrierung, wenn es stärkere Änderung der Wetterlage gibt. Details sind in der"Infrarotkalibrierung" angegeben.Außer Ihrer regelmäßigen Vorflugkontrolle, überprüfen Sie auch den <strong>Co</strong>-<strong>Pilot</strong> vor jedemFlug. Details sind im "Vorflug der <strong>Co</strong>-<strong>Pilot</strong> überprüfen" angegeben.Der <strong>Co</strong>-<strong>Pilot</strong> darf während des 3D- Fluges (z.B. Flug in Rückenlage) nicht eingeschaltetsein.Optionen, für <strong>Co</strong>mpany-<strong>Pilot</strong> Kontrolle<strong>Co</strong>-<strong>Pilot</strong> kann <strong>auf</strong> drei verschiedene Weisen kontrolliert werden.Die zur Verfügung stehenden Möglichkeiten hängen <strong>von</strong> den Fähigkeiten Ihres Senders ab.Proportionale Kontrolle per Dreh/ oder Schieberegler.Wenn Ihr Sender einen unbenutzten proportionaler Kontrollkanal (gewöhnlich ein Schalter)hat, dieser kann mit dem Ein- Ausschalten belegt werden, oder es kann mit einem Regler dieEmpfindlichkeit während des Flugs regulieret werden.Beispiele der proportionalen Kontrolle:Regulieren Sie Empfindlichkeit des <strong>Co</strong>- <strong>Pilot</strong> je nach Ihren Flugerfahrungen.Stellen Sie den <strong>Co</strong>-<strong>Pilot</strong> für den Kunstflug ab und schalten Sie für die Landung oder fürstarken Seitenwind wieder ein.Bei korrekter Installation, gemäß Instruktionen der "Anbau <strong>Co</strong>-<strong>Pilot</strong>" arbeitet Sender-Knopfwie folgt:5
Ein/Aus-Kontrolle per Schalter.Wenn Ihr Sender einen Ein/Aus-Kanal hat (gewöhnlich ein Schalter <strong>auf</strong> dem Sender), könnenSie den <strong>Co</strong>- <strong>Pilot</strong> während des Fluges ON und OFF schalten.Sie könne die Sensibilität dann nur ändern, wenn das Flugzeug am Boden ist und dasFlugstabilisierungssystem abgeschaltet ist.Mit der Ein/Aus- Kontrolle können Sie viel leichter und schneller zur Stabilisierungzurückkehren (gegenüber dem Drehen eines Reglers eines proportional Kanal bis zumrichtigen Einstellpunkt.Manuelle Kontrolle.Wenn Ihr Sender/Empfänger keinen unbenutzten Kanal hat, ist der <strong>Co</strong>-<strong>Pilot</strong> während desFlugs immer ON. Seine Flugstabilisierungseigenschaften werden durch die Einstellungen am<strong>Co</strong>- <strong>Pilot</strong> festgelegt. Um Empfindlichkeit zu ändern, müssen Sie landen und manuellnachregulieren.Installation des <strong>Co</strong>- <strong>Pilot</strong>1. Befestigen Sie den Sensor.a. Entscheiden Sie sich für den richtigen Befestigungspunkt. Der Sensor sollte dasNiveau des horizontalen Fluges haben (eine geringe Abweichung ist annehmbar).b. Der Sensor sollte zu allen Seiten eine klare Sicht <strong>auf</strong> dem Horizont haben.c. Der Sensor darf nicht im Abgasstrom liegen.d. Verwenden Sie Sandpapier, um die Oberfläche <strong>auf</strong>zurauen, <strong>auf</strong> der der Sensorbestiegen werden soll. Reinigen Sie das angeraute Gebiet mit Alkohol lassen Sie esabtrocknen.e. Reinigen Sie den Boden des Sensors mit Alkohol und lassen Sie ihn abtrocknen.f. Besteigen Sie, dass der Sensor mit dem "P" Kennzeichnung zur Vorderseite und zurHinterseite des Flugzeuges (oder diagonal <strong>auf</strong> einem Hubschrauber), und mit der Lageder Steckers mit dem Weg zum Empfänger (siehe Bild für Ihren Modell- Typ).2. Installieren Sie und sichern Sie das Flachbandkabel.g. Stecken Sie ein Ende des Flachbandkabels in den Sensor.h. Suchen Sie eine optimale Verlegung des Kabels zum Empfänger. Das Kabel darf keinFenster des Sensors bedeckt.i. Sichern Sie das Kabel.6
3. Befestigen Sie den Infrarotkalibrierungsschalter.j. Wählen Sie eine gute Position für den Infrarotkalibrierungstaster aus.k. Besteigen Sie den Infrarotkalibrierungstaster sicher am Flugzeug.Wenn Sie den Schalter drücken, starten Sie die Kalibrierung.8
4. Elektrischer Anschluss des <strong>Co</strong>- <strong>Pilot</strong>l. Trennen Sie die Roll /Querruderservos (aileron) und die Höhenservos (elevator) vomEmpfänger.m. Verbinden Sie die Kabel.n. Wenn Ihr Empfänger keinen unbenutzten Kanal für den <strong>Co</strong>- <strong>Pilot</strong> hat, lassen Sie dasFernbedienungskabel (RMT) unverbunden.o. Dip- Schaltersatz 3, wie gezeigt, je nach Art des Flugzeuges.Bei der Verwendung eines Elevator- Mixers.a. Drehen Sie die Empfindlichkeitskontrolle der <strong>Co</strong>- <strong>Pilot</strong> gegen den Uhrzeigersinn(OFF).b. Schalten Sie den Sender ein und dann verbinden Sie den Akku mit dem Regler/Empfänger.c. Ziehen Sie den Sender- Stick für das Höhenruder. Beide Höhenruder müssen sich nachoben bewegen. Wenn sie nicht richtig arbeiten (in entgegengesetzter Richtung),tauschen Sie Servo 1 und Servo 2 für Höhe am Empfänger. Und/ oder ändern Sie dieRichtung der Servos am Sender.d. Überprüfen Sie dementsprechend auch die Roll/ Querruderfunktion.e. Wiederholen Sie die Schritte bis alle Einstellungen stimmen.9
Flugzeug – Normal- Modell10
Nurflügel- ModellHeli11
Anfängliche Einstellung1. Einstellen der manuellen Empfindlichkeitskontrolle.Drehen Sie die "Throw" Einstellschraube im Uhrzeigersinn um die maximimaleEmpfindlichkeit zu erreichen.2. Setup- Mode einschalten.e. Schalten Sie den Sender an.f. Drücken Sie und halten Sie den Infrarotkalibrierungstaster.g. Mit dem noch gedrückten Taster, stecken Sie den Akku am Empfänger/ Regler.h. Die Rudermaschinen bewegen sich drei Mal, um anzuzeigen dass der <strong>Co</strong>- <strong>Pilot</strong> imSetup- Mode ist.12
3. Einstellen des Senders <strong>auf</strong> <strong>Co</strong>- <strong>Pilot</strong>.a. Auf dem Sender zu dem entsprechenden Kanal wechseln:b. Wenn der Kanal <strong>auf</strong> einem Schalter gelegt ist schalten Sie den entsprechendenSchalter, oderc. Wenn der Kanal <strong>auf</strong> einem proportionalen Regler gelegt ist regeln Sie dieEmpfindlichkeit über z.B einen Drehregler.d. Wenn der ein Servozyklus durchgeführt wird, ist der <strong>Co</strong>- <strong>Pilot</strong> "ON", wenn derServozyklus zweimal durchgeführt wird, ist der <strong>Co</strong>- <strong>Pilot</strong> "OFF".e. oder drehen Sie den Regler ganz im Uhrzeigersinn <strong>auf</strong> um die volle Empfindlichkeiteinzustellen.f. Wenn der <strong>Co</strong>- <strong>Pilot</strong> nicht zu arbeiten scheint, können Sie den Weg für diesen Kanalam Sender <strong>auf</strong> 120% vergrößern.4. Überprüfen des <strong>Co</strong>- <strong>Pilot</strong> (Sensoren sind <strong>auf</strong> "ON").PITCH / HÖHENRUDERa. Standplatz <strong>auf</strong> der Seite des Flugzeuges, dann legen Sie Ihre Hand an die Vorderseitedes Sensorfensters, welches nach vorne zeigt (dieses täuscht dem Flugzeug vor, daszur Erde hin stürzt).b. Das Höhenruder (Pitch) des Flugzeuges sollte sich nach oben bewegen.Beachten Sie:Wenn Sie wenig oder keine Bewegung infolge sehen gehen mit ihrer Hand näher an denSensor.Sie können auch alternativ ein Glas mit heißem Wasser benutzen und die Versuche draußenwiederholen.- Bei der Hand am vorderen Sensor muss sich das Höhenruder nach oben bewegen. Wenn dieKorrekturrichtung falsch ist, kann dieses am Änderungsschalter 1 und / oder 2 am <strong>Co</strong>-<strong>Pilot</strong>geändert werden.- Bewegen Sie die Nase des Flugzeuges nach unten muss das Höhenruder nach obenausschlagen (Nur draußen richtig möglich).13
6. Einstellen <strong>von</strong> Auto- Trimm "ON“ oder "OFF"Für das Auto- Trimm "ON" drehen Sie den "Throw" <strong>auf</strong> Maximum nach rechts.Für das Auto- Trimm "OFF" drehen Sie den "Throw" <strong>auf</strong> Maximum nach links.7. Schalten Sie den Empfänger ab, um den Setup- Mode zu verlassen.8. Trimmen Sie das Modell.a. Schalten Sie den Empfänger wieder ein.b. Drehen Sie den Empfindlichkeitregler "Throw" ganz nach links um den <strong>Co</strong>- <strong>Pilot</strong>enabzuschalten.c. Setzen Sie die Trimmung ihres Modells. Am besten Sie er fliegen diese zuvor ohneden CO- <strong>Pilot</strong> eingeschaltet zu haben.d. Nach dem Trimmen, setzen Sie die Throw- Kontrolle zurück.Bemerkungen:Diese Tests, werden später bei dem Höhenruder und bei den Querrudern gleichzeitigdurchgeführt. Schalten Sie den Schalter 3 um <strong>auf</strong> "ON" zu schalten.Weiteres über Auto- Trimm:Für Anfänger: Auto- Trimm "ON", starten und in entsprechender Höhe mit eingeschalteten<strong>Co</strong>-<strong>Pilot</strong> trimmen.Für Fortgeschrittene: Auto- Trimm "OFF", starten und in entsprechender Höhe mitausgeschalteten <strong>Co</strong>-<strong>Pilot</strong> trimmen. Danach <strong>Co</strong>- <strong>Pilot</strong> einschalten für die automatischeKorrektur, nun aber nicht weiter trimmen, da bei späteren Abschalten des <strong>Co</strong>- <strong>Pilot</strong>en dieUrsprungstrimmung verloren geht.15
Beispielbilder16
<strong>FMA</strong> DigitalservopufferDas Verwenden der <strong>Co</strong>- <strong>Pilot</strong> mit Futaba PCM Empfängern.(Kann für Futaba PCM Empfänger-Modelle erforderlich sein wenn Kanal 1 und/oder 2 nichteinwandfrei funktionieren)Installieren Sie den <strong>FMA</strong> Digitalservopuffer (Teil Nr. 605SB), wie gezeigt,im Bild unten:18
Auf dem FlugfeldBei der Verwendung des <strong>Co</strong>- <strong>Pilot</strong>en müssen Sie zwei Routinen zu Ihrer StandardÜberprüfung vor dem Flug durchführen:1. Infrarotfeldkalibrierung: Vor Ihrem ersten Flug Tag, und bei jeder wesentlichenÄnderung der Zeit und des Wetters.2. <strong>Co</strong>- <strong>Pilot</strong>-Vorflugkontrolle: Kontrolle der Funktionen.Kalibrierungs- Einstellung:a) Schalten Sie den Sender ein, dann schließen Sie die Stromversorgung zum Empfänger.Betätigen Sie noch nicht den Infrarotkalibrierungstaster.b) Halten Sie das Modell über das Flugfeld (Gras ist am besten).c) Halten Sie das Modell je nach Modell- Typ.d) Drücken Sie den Infrarotkalibrierungsschalter und halten Sie z.B das Flugmodell mitder Nase nach unten.e) Nach einer kurzen Verzögerung (ungefähr 2 Sekunden), bewegen sich die Servos (einZyklus ist ein hin und her bewegen der Servos).Anzahl der Zyklen:• 3 bis 10 Zyklen: <strong>Co</strong>- <strong>Pilot</strong> wird zur vollen Stabilisierung zur Verfügung stehen.• 2 Zyklen: <strong>Co</strong>- <strong>Pilot</strong> wird nur wenig Stabilisierung zur Verfügung stellen, aber wird jenach Terrain mehr Unterstützung leisten können.• 1 Zyklus: Fliegen Sie nicht mit eingeschaltetem <strong>Co</strong>- <strong>Pilot</strong>.Nach diesem Schritt werden die Servos (Rudermaschinen) sich langsam hin und her bewegen.Während dieser Periode legen Sie das Modell im Flugniveau <strong>auf</strong> dem Boden.f) Nachdem das Modell im Niveau ist, entfernen Sie sich mindestens (3 Meter) dannbetätigen Sie das Querruder (Rolle) voll zur einer Seite. Das Querruder wird mit einerZyklusbewegung anzeigen, dass die Niveau-Orientierung gesetzt ist.g) Kalibrierung ist abgeschlossen.Die Kalibrierung ist gespeichert, nachdem nach dem die Versorgungsspannung getrennt ist.19
Bemerkungen zum KalibrierenDer Sensor des <strong>Co</strong>-<strong>Pilot</strong>en sieht viele Meter in allen Richtungen. Sein Sichtfeld schließt Gras,Bäume ein. Gebäude, Fahrbahn, Leute, Autos, Wolken, Wasser und viele andere Gegenständemit verschiedenen Infrarotemissionen. Der Sensor entdeckt die durchschnittlicheInfrarottemperatur.Während der Kalibrierung sieht der Sensor des <strong>Co</strong>-<strong>Pilot</strong>en Infrarottemperaturen in derunmittelbaren Umgebung des Modells. Das bedeutet dass Sie generell die Kalibrierung überdem Gebiet durchführen müssen in dem Sie fliegen. Am besten eignet sich Gras.Große Schwankungen im Terrain oder im Wetter können die Fähigkeit des <strong>Co</strong>-<strong>Pilot</strong>enbeeinträchtigen, das Flugzeug kann dann instabil werden. Dieses kann mit einemNachkalibrieren behoben werden.Das Kalibrierungsverfahren eignet sich nicht über z.B. Asphalt (wie eine Rollbahn, Startbahn)oder <strong>auf</strong> Parkplätzen.Was geschieht, wenn Sie <strong>Co</strong>-<strong>Pilot</strong> unter den schlechtes möglichen Bedingungen arbeiten soll?Wenn <strong>Co</strong>-<strong>Pilot</strong> in der Infrarottemperatur keinen bedeutenden Unterschied sieht, gibt er keinAusgleichen aus. Um eventuelle Fehlimpulse zu vermeiden sollten Sie in diesen Fällen den<strong>Co</strong>-<strong>Pilot</strong>en per Sender abschalten.Was geschieht, wenn Sie über das Land kalibrieren und über Wasser fliegen? In diesem Fallkann der Sensor nicht genügend Änderungen erkennen und er würde nicht einwandfreiarbeiten.Wenn Sie über eine größere Wassermasse fliegen, sieht der Sensor eine etwas niedrigeredurchschnittliche Infrarottemperatur im Vergleich zu Fliegen über das Land. Auch dieseskann zu Fehlinterpretationen führen.21
Weiteres zum Fliegen mit dem CO- <strong>Pilot</strong>enWenn Sie ein Anfänger sind, suchen Sie sich Hilfe <strong>von</strong> einem erfahrenen <strong>Pilot</strong>en. Der <strong>Co</strong>-<strong>Pilot</strong> macht es Ihnen leichter das fliegen zu lernen.Vergewissern Sie sich, dass Ihr komplettes Steuerungssystem richtig installiert ist undfunktioniert.Wenn das Flugzeug vorher nicht geflogen worden ist, holen Sie sich evtl. Hilfe <strong>von</strong> einemerfahrenen <strong>Pilot</strong>en.Führen Sie immer eine Infrarotkalibrierung am Flugfeld vor jedem durch Start durch.Kalibrieren Sie nach bedeutenden Änderungen des Wetters oder anderer Bedingungen.Das Fliegen mit der <strong>Co</strong>- <strong>Pilot</strong> unterscheidet sich vom normalen Fliegen. Wenn der <strong>Co</strong>-<strong>Pilot</strong>eingeschaltet ist, versucht er immer das Modell in sein Niveau zu halten. Sie werden je nachEinstellung etwas mehr Steuerbewegungen durchführen müssen, um eine Fluglagenänderungherbeizuführen.Anfängliche Flugtests sind erforderlich um eine geeignete Empfindlichkeit- Anpassung zufinden.Die beste Möglichkeit ist den <strong>Co</strong>- <strong>Pilot</strong>en über den Sender zu steuern. Schalten Sie ihrem <strong>Co</strong>-<strong>Pilot</strong>en ein wenn Sie ihn brauchen und schalten Sie ihn ab wenn sicher genug sind. Oderverwenden Sie den <strong>Co</strong>-<strong>Pilot</strong> als einen"Notfall- System", um das Flugzeug zu stabilisieren.Wenn Sie ein Flugzeugschütteln oder Oszillieren bemerken, während der <strong>Co</strong>-<strong>Pilot</strong> aktiv istist die Empfindlichkeit des <strong>Co</strong>- <strong>Pilot</strong> zu hoch eingestellt.Wenn Sie keine richtige Unterschiede in der Wirkungsweise bemerken, führen Sie dieKalibrierung noch einmal durch.Führen Sie die Tests in größerer Höhe und mit niedriger Geschwindigkeit durch.22