Betriebsanleitung KINETROL-EL-Stellungsregler - Schwabe
Betriebsanleitung KINETROL-EL-Stellungsregler - Schwabe
Betriebsanleitung KINETROL-EL-Stellungsregler - Schwabe

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einbau-, Wartungs- undReparaturanweisungEinbau-, Wartungs- undReparaturanleitungDigitaler <strong>EL</strong>-<strong>Stellungsregler</strong>von <strong>KINETROL</strong>DIETRICH SCHWABEGesellschaft für Steuer - Regel - Armaturentechnik mbHphone: +49(0)6071-92229- 0fax: +49(0)6071-92229-11Postfach 1141 mail: info@schwabe-sra.de64854 Eppertshausen web: www.schwabe-sra.deIrrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.doc
InhaltsangabeNachfolgende Seiten umfassen die Instruktionen für denDIGITALEN <strong>EL</strong>-ST<strong>EL</strong>LUNGSREGLER.Die notwendigen Informationen für den doppelt- oder einfachwirkenden Basisantrieb finden Sie imServicehandbuch für <strong>KINETROL</strong> - Schwenkantriebe.Seite Bezeichnung1 1. Inhaltsangabe2 2. Technische Daten / Bestell-Code456788999101112121212131314143. Einbau 3.1 Direktmontage auf <strong>KINETROL</strong>-Schwenkantriebe3.2 Autonomer Aufbau3.3 Luft- und Signalanschluss4. Einstellungen 4.0 Allgemeines4.1 Einstellung der Geschwindigkeit4.2 Einstellung der Schaltscheibe / Endschalter4.3 Elektronischen Einstellungen4.4 Proportionalbereicht4.5 Dämpfung4.6 Nicht – lineare Kennlinien4.7 Endlagen bei min. Signal (LCP) und bei max. Signal(HCP)4.8 Feedback – Potentiometer – Einstellungen4.9 Endlagen Einstellung4.10 Setup-Modus verlassen4.11 Rücksetzen des <strong>Stellungsregler</strong> in die Grundstellung4.12 EEPROM Kontrollsummen Fehler4.13 Bewegungsumkehr4.14 stufenlose Stellungsrückmeldung (Option)4.14.1 Anschluss4.14.2 nachträgliche Montage4.14.3 Einstellungen15 5. Wartung undFehlersuche16 Anhang A Einstellen bzw. Abstimmen des eigensicheren <strong>EL</strong>-<strong>Stellungsregler</strong>s17 Anhang B Einstellen des Parameters „Proportionalbereich“18 Anhang C Einstellen des Parameters „Dämpfung“19 Anhang D Einstellen der EndlagenIrrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 2
1.0 Technische DatenHilfsenergie : Instrumentenluft 3.5 – 7.0 bar(trocken, öl- und staubfrei)Zur Versorgung dieser <strong>Stellungsregler</strong> darfausschliesslich sogenannte Mess- oderStellsignalbereich : 4 – 20mA oder split – range,6-8V DCInstrumentenluft verwendet werden. Die Luftmuss den nachstehenden QualitätsklassenBewegungsverlauf : drehendnach DIN ISO 8573-1:2001 entsprechen.Nenndrehwinkel : 0 – 90°Wirkungssinn : direkt oder revers (umkehrbar)Hysterese : ≤ 0.7% des Nennhubes 6.1 FesteKlasse 6VerunreinigungenLinearität : ≤ 1.0% des Nennhubes max. Teilchengröße5µmAnsprechspanne : ≤ 0.1mA max. Teilchendichte5mg/m³Umkehrspanne : ≤ 0.1mA 6.2 Wassergehalt Klasse4Wiederholgenauigkeit : < 0.7% des Nennhubesmax. Drucktaupunkt+3°CBetriebstemperatur : -20°C bis +70°C 6.3 Gesamtoelgehalt Klasse4Schutzart : IP 65 max. Konzentration5mg/m³2.0 Bestell – CodeModellAusführungenBauart Kennung Stufenlose Stellungsrückmeldungpotentialfrei- <strong>EL</strong>0 0siehe Artikelcode0 - ohne Antrieb 0 - ohne Federschlusseinheit4 - Antrieb + <strong>EL</strong>linksdrehend*)7 - Antrieb + <strong>EL</strong>rechtsdrehend*)2 - Federschlusseinheitrechtsdrehend3 - Federschlusseinheitlinksdrehend4 - <strong>Stellungsregler</strong>linksdrehend7 - <strong>Stellungsregler</strong>rechtsdrehend0 - ohne Endschalter 0 - ohneStellungsrückmeldung1 - 2 x V3 NAMUR -Initatoren4 - 2 x V3, mechan.Endschalter6 - 2 Näherungsschalter5-30V DC1 - mit Stellungsrückmeldung0 - StandardN - VDI/VDE 3845Vermerk*) Rechtsdrehend (im Uhrzeigersinn) undlinksdrehend (gegen den Uhrzeigersinn)versteht sich in der Draufsicht gesehen.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 3
3.0 EinbauDer digitale <strong>EL</strong>-<strong>Stellungsregler</strong> von <strong>KINETROL</strong> wird in zwei verschiedenen Bauformen geliefert:A) zum direkten Aufbau auf <strong>KINETROL</strong> – SchwenkantriebeB) mit Schnittstelle nach VDI/VDE 3845 zum indirekten Aufbau auf Fremdantriebe und auf die viergrößten Modelle der <strong>KINETROL</strong> – Baureihe.Unter Punkt 3.3 (Seite 6) finden Sie Hinweise zum Aufbau und Anschluss für beide Bauformen.Die Einstell- Betriebs- und Wartungsanweisungen ab Punkt 4.0 (Seiten 7 – 14) gelten für beide Bauformen.Bei komplett angelieferten Regelantrieben können Sie Punkt 3.1 und 3.2 überspringen.3.1 Direktmontage auf <strong>KINETROL</strong> - SchwenkantriebeBauformen für den direkten Aufbau des <strong>Stellungsregler</strong>sDOPP<strong>EL</strong>TWIRKENDE DIN – ANTRIEBE mit<strong>Stellungsregler</strong>(Innenvierkant und AußenvierkantabmessungenISO 5211)ZwischenflanschEINFACHWIRKENDE DIN – ANTRIEBE mit<strong>Stellungsregler</strong>(Innenvierkant und Außenvierkantabmessungennach ISO 5211)Größe 05/07/08/09 Größe 12/14 Größe 05/07/09DOPP<strong>EL</strong>TWIRKENDE Standard – ANTRIEBE mit<strong>Stellungsregler</strong> (Außenvierkant)Zwischen-DOPP<strong>EL</strong>TWIRKENDE Standard – ANTRIEBE mit<strong>Stellungsregler</strong> (Außenvierkant)Zwischen-Größe 05/07/08/09 Größe 12/14 Größe 05/07/08/09 Größe 12/14Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 4
Direktmontage1 Bringen Sie den Schwenkflügel des Antriebes in seineMittelstellung. Der obere Wellenvierkant muss wie imBild 2 parallel zu den Hauptachsen des Antriebesstehen.2 Nehmen Sie den Deckel des <strong>Stellungsregler</strong>s ab undlockern Sie die Befestigungsschraube in der Mitte derWelle (Bild 3), lösen Sie die 5 M4-Schlitzkopfschraubenmit denen die rote Kunststoff-Grundplatte im Gehäusebefestigt ist . Lösen Sie die beiden Kabelenden zumServo-Ventil und heben Sie die Grundplatte komplettmit Welle und Elektronik etc. aus dem Gehäuse heraus.3 Befestigen Sie das <strong>Stellungsregler</strong>gehäuse auf demAntrieb entsprechend Bild 2. Dabei achten Sie bittedarauf, dass die beiden O-Ringe für die Lufteinlässeeingelegt sind und das die Antriebswelle zentrisch zurBohrung im Gehäuseboden sitzt.4 Beachten Sie die Begrenzung des Drehwinkels der<strong>Stellungsregler</strong>welle durch das, mit dem Kreissegmentverbundene, Stahlband (siehe Bild 4).Halten Sie die <strong>Stellungsregler</strong>welle in ihrer Mittelstellungdes Drehwinkels (Wellenvierkant ungefährparallel zu den Hauptachsen der Grundplatte) vonHand fest und stülpen Sie die gesamte Grundplatte mitviel Gefühl so über das <strong>Stellungsregler</strong>gehäuse, dassder Innenvierkant der <strong>Stellungsregler</strong>welle über denAußenvierkant des Antriebs gleitet. Eventuell hilft eineleichte Drehbewegung an der <strong>Stellungsregler</strong>welle dierichtige parallele Winkellage zu erfüllen.5 Ziehen Sie nun die Befestigungsschraube in der Mitteder Welle sowie die 5 M4 – Schlitzkopfschrauben mitdenen die rote Kunststoff – Grundplatte im Gehäusebefestigt ist, wieder fest und schließen Sie die beidenKabelenden zum Servo-Ventil an. Nach vollendetenEinstellungen (Abschnitt 4) ist der Gehäusedeckelwieder entspr. zu montieren.Bild 2Mittelstellung des Antriebsvierkants (bereit zumAufsetzen der in Stellung gemäß Bild 4 befindlichenGrundplatte).BefestigungsschraubeBild 3Bild 4Unteransicht der Grundplatte mit Welle und Potentiometerin MittelstellungEs ist unbedingt auf die oben beschriebene Orientierung der Wellenenden von Antrieb und <strong>Stellungsregler</strong> zuachten, da ein Winkelfehler von 90° zur Zerstörung des Potentiometers führen kann.Natürlich ist es auch möglich und bei einfachwirkenden Antrieben unvermeidbar, die Grundplatte zumontieren, wenn sich auch sowohl Antriebs- als auch <strong>Stellungsregler</strong>welle in der gleichen von beidenmöglichen Endlagen befinden. Auf die gleichen Endlagen ist besonders zu achten, da ein Winkelfehler von90° ebenfalls zur Zerstörung des Potentiometers führen kann.StahlbandIrrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 5
3.2 Aufbau autonomer <strong>EL</strong>-<strong>Stellungsregler</strong>Bauformen mit indirektem Aufbau des <strong>Stellungsregler</strong>sDOPP<strong>EL</strong>TWIRKENDE DIN – ANTRIEBE mit <strong>Stellungsregler</strong>(Innenvierkant und Anbauabmessungen nach ISO 5211)EINFACHWIRKENDE DIN – ANTRIEBE mit <strong>Stellungsregler</strong>(Innenvierkant und Anbauab-messungen nach ISO 5211)Größe 16 Größen 10/12/14/16DOPP<strong>EL</strong>TWIRKENDE STANDARD – ANTRIEBE mit<strong>Stellungsregler</strong> (Außenvierkant)EINFACHWIRKENDE STANDARD – ANTRIEBE mit<strong>Stellungsregler</strong> (Außenvierkant)Größe 16/18 Größe 16/18Wir empfehlen die Montage des <strong>Stellungsregler</strong>s in der Mittellage des Antriebs und des <strong>Stellungsregler</strong>sdurchzuführen. Die aktuelle Winkelstellung kann leicht am Vorsprung unten an der <strong>Stellungsregler</strong>welle alsauch an dem Stellungsanzeiger der oberen Antriebswelle erkannt werden. Der <strong>Stellungsregler</strong> braucht hierzunicht geöffnet werden. Bei Montage in einer der beiden Endlagen ist sicherzustellen, dass die Drehrichtungvon Antrieb und <strong>Stellungsregler</strong> übereinstimmen – ein Winkelfehler von 90° kann zur Zerstörung desPotentiometerantriebs führen.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 6
Bezugsebene 1Zum Anbau von <strong>Stellungsregler</strong>n mit4 Bohrungen ø6.5mm zur Aufnahmeeines <strong>Stellungsregler</strong>s sowie einerzentrischen Bohrung durch die dieAnschlusswelle hindurchragen kann..Bezugsebene 2Zum Anbau der Konsole an denSchwenkantrieb mit – 4 Bohrungenø5.5mm.In der für den Anbau vorgesehenenFlanschfläche des Schwenkantriebessind 4 GewindebohrungenM5 (8mm tief) vorzusehen.Die Länge B des Wellenstummels unddie Bohrungsabstände A der Befestigungsebene2 sollen gemäß Tabelle inBild 7 einander zugeordnet sein. DerWellenstummel des Schwenkantriebesist mit einem Mitnehmerschlitz (4mmbreit, 4mm tief) und einer zentrischenGewindebohrung M6 zu versehen.Bezugsebene 1Bezugsebene 2Bild 5Bild 6Bild 7Konsole zum Aufbau von <strong>Stellungsregler</strong>n auf FremdantriebeAnbauabmessungen des <strong>Stellungsregler</strong>s4 Gewindebohrungen M 6x5mm tiefauf Lochkreis ø50Bild 8Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 7
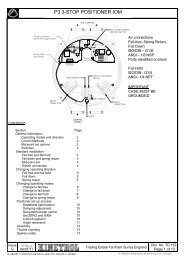
3.3 Luft- und SignalanschlussAnsicht vornAnsicht hintenCWACWEingang M20x1.5Erde mit Verschlussschraube (fürdie Option Endschalter undstufenlose RückmeldungSignaleingangM20x1.5Luftanschluss G 1/8“2 EntlüftungsdrosselnBild 92 alternative Ausgänge G 1/8“ für externeVerrohrung mit Fremdantrieben(normalerweise mit Stopfen verschlossen)Bild 10DraufsichtFeedback-Potentiometermechan. Umkehrder WirkungsrichtungAnschlusssteckerfür die OptionstufenloseRückmeldungServo-VentilAnschlussklemmenfür das Signal undggf. für die Option stufenloseRückmeldungAnschlussklemmenfür die Optionoberer Endschalter12345 N/C6 N/O7 CN/C 8N/O 9C 10Klemmschraubefür die WelleNockenscheibe(Kunststoff)Anschlussklemmenfür die OptionuntererEndschalterTransportverschraubung Schutzleiter bzw. Erde Bild 111 - 4-20mA Signal + 7 - oberer Endschalter C2 - 4-20mA Signal - 8 - unterer Endschalter N/C3 - Stellungsrückmeldung + 9 - unterer Endschalter N/O4 - Stellungsrückmeldung - 10 - unterer Endschalter C5 - oberer Endschalter N/C6 - oberer EndschalterN/OAls Stellsignal ist das Einheitssignal von 4-20mA einzuspeisen. Der <strong>Stellungsregler</strong> bewirkt einenArbeitswinkel von 0-90° linear proportional zum Signal. Die Funktion des <strong>Stellungsregler</strong>s notwendigeArbeitsspannung wird dem Signal entnommen (2-Draht-System) unter Verzicht auf eine zusätzliche externeSpannungsquelle. Zum Aussteuern des <strong>Stellungsregler</strong>s genügt eine Spannung von etwa 6-8Volt; d.h. einEinheitssignal von 4-20mA mit einer Spannung von 24V DC ist mit dem <strong>Stellungsregler</strong>eingang kompatibelund kann die 28V, 300Ω Zenerbarriere und den <strong>Stellungsregler</strong> aussteuern.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 8
4.0 EinstellungAnordnung der verschiedenen Einstellmöglichkeiten+ 5V Anschluss für dasSignal Feedback-PotentiometerOVFeedback -PotentiometerSETUP - TasterAnschluss für die stufenloseStellungsrückmeldung(Option, siehe Seite 14)+ 5VPositionOVSETUP – LED´sRUNMODEPBANDDAMPCURV<strong>EL</strong>OWHIGHPOTSteckbrücke fürlineare / nichtlineareKennlinienNullpunkteinstellung beider Option stufenloseRückmeldungBereichseinstellung beider Option stufenloseRückmeldungBild 12AllgemeinesDer <strong>Stellungsregler</strong> kann mit linearen oder nicht – linearen Kennlinien betrieben werden. Zum Betrieb mit nicht– linearen Kennlinien ist bei abgeschaltetem Einheitssignal (und, falls vorhanden, spannungsloserStellungsrückmeldung) die Steckbrücke umzusetzen (siehe Seite 10). Nach Wiederanlegen desEinheitssignals arbeitet der <strong>Stellungsregler</strong> mit einer der wählbaren nicht – linearen Kennlinien.In beiden Einstellungen, linear oder nicht – linear, hat der <strong>Stellungsregler</strong> zwei getrennte Betriebsarten; denStandard – Modus für den laufenden Betrieb und den Setup – Modus zur Eingabe der Einstellparameter.Im Standard – Modus arbeitet das Gerät korrekt entsprechend dem anliegenden Einheitssignal. Nacherfolgtem Anschließen des <strong>Stellungsregler</strong>s befindet sich dieser im Standard – Modus, seinerGrundeinstellung und keine der 6 LED`s leuchtet oder blinkt. Der <strong>Stellungsregler</strong> verbleibt im Standard –Modus bis manuell auf den Setup – Modus umgeschaltet wird.Im Setup - Modus kann der <strong>Stellungsregler</strong> den Einsatzbedingungen angepasst werden. In diesem Modus istdas Verhalten des <strong>Stellungsregler</strong>s stets unter Kontrolle, er reagiert jedoch nicht immer auf Änderungen desEinheitssignals. Nach Abschluss der Einstellarbeiten ist zum Normalbetrieb wieder in den Standard – Moduszurückzuschalten.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 9
Verhalten beiSignalabriss doppeltwirkend:einfachwirkend:Luftausfalldoppeltwirkend:einfachwirkend:Antrieb fährt in die Ausgangslage zurückAntrieb fährt in die durch den <strong>Stellungsregler</strong> definierte Sicherheitsstellung(AUF/ ZU)Antrieb verbleibt in der PositionAntrieb fährt in die durch die Feder definierte Sicherheitsstellung (AUF/ ZU)Diese Arbeitsvorgänge im Setup – Modus werden in den folgenden Abschnitten beschrieben.4.1 Einstellung der GeschwindigkeitSie können die Geschwindigkeit des Antriebes mit Hilfe eines Schraubendrehers über die Abluftdrosseln (Bild9, Seite 6) reduzieren. Standard – Werkseinstellung ist die maximale Geschwindigkeit.4.2 Einstellung der Schaltscheibe / EndschalterBei der Option „zusätzliche Endschalter“ sind werksseitig die Nockenscheiben für die Endlagen eingestellt. Siekönnen für jeden beliebigen Schaltpunkt im Bereich des Stellwinkels verstellt werden.Nockenscheibe aus KunststoffNockenscheiben aus Kunststoff, siehe Bild 13, könnenSie durch leichten Druck, um je 1 Grad drehend einstellen.Stellen Sie zuerst die untere Nockenscheibemit Hilfe eines Schraubenzieher als Hebel gegenspeziellen Kunststoffstifte (siehe Bild 13) auf derGrundplatine ein.Drücken Sie nun, mit leichtem Fingerdruck die obereNockenscheibe nach unten und drehen Sie diese nundem erforderlichen Schaltpunkt in die entspr. Position.Die Gradeinteilung auf der Kupplung zeigt die Positiondes Schwenkantriebes bei geöffnetem <strong>EL</strong>-<strong>Stellungsregler</strong>an.Gradeinteilungauf der WelleBild 13Kunststoffstifte (Ansatzpunkt, um denSchraubendreher als Hebel zu benutzenIrrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 10
4.3 Elektronische EinstellungenNach Lösen der vier Gehäusedeckelschrauben und Entfernen des Gehäusedeckels sind die Taster, mit denendie Einstellungen am digitalen <strong>Stellungsregler</strong> verändert werden können, frei zugänglich.Um Einstellungen vornehmen zu können, muss ein Einheitssignal von mindestens 3.8mA anliegen.Durch gleichzeitiges Drücken der „UP“ und der „SET“ Taster gelangt man in den Setup – Modus und dieLED – Anzeige für „Kennlinie wählen“ leuchtet auf. Im Setup – Modus können jetzt die möglichen Parameterdurch Drücken der „UP“ oder „Down“ Taster angewählt werden. Der angewählte Parameter wird durch seineaufleuchtende LED – Anzeige angezeigt.Folgende Parameter können eingestellt werden:- Proportionalbereich = PBAND- Dämpfung = DAMP- Nichtlineare Kennlinie wählen = CURVE- Einstellen der Endlage bei Signal min. (LCP) = LOW- Einstellen der Endlage bei Signal max. (HCP) = HIGHPOTHIGHLOWCURVE- Feedback – Potentiometer – Einstellung = POT *)*) Für diesen Parameter gibt es keinen Änderungsmodus, jedoch kann hier die automatische Endlageneinstellungeingeleitet werden (siehe Seite 12, Punkt 5.9).Ist ein Parameter ausgewählt, wird die „SET“ Taste gedrückt, um Einstellungen vornehmen zu können. DieLED – Anzeige beginnt zu blinken. Das Blinken zeigt an, dass wir uns jetzt im Änderungsmodus befinden.Die Arbeitsschritte sind für jeden Parameter nachfolgend beschrieben.4.4 ProportionalbereichIm Änderungsmodus (PBAND – LED blinkt) kann durch Drücken des „UP“ oder „DOWN“ Tasters derProportionalbereich beeinflusst werden. Es können insgesamt 29 verschiedene Einstellungen angewähltwerden. Ausgehend von der mittleren Grundstellung kann der Proportionalbereich durch Betätigung des „UP“Tasters jedes mal um den Faktor 1.1 erhöht bzw. durch Betätigung des „DOWN“ Tasters um den gleichenFaktor vermindert werden.Achtung: Bei jeder Änderung durch die Taster „UP“ oder „DOWN“ wird der neue Wert gespeichert. DieseSpeicherung bleibt auch bei Stromausfall erhalten.Der <strong>Stellungsregler</strong> ist während dieser Einstellung angeschlossen und folgt dem anstehenden Eingangssignal.Ist die gewünschte Einstellung des Proportionalbereichs erfolgt, wird durch Drücken der „SET“ Taste derÄnderungsmodus verlassen. Die LED – Anzeige hört auf zu blinken und leuchtet durchgehend auf. Jetzt kannzu einem anderen Parameter gewechselt werden.4.5 DämpfungIm Änderungsmodus (DAMP – LED blinkt) kann durch Drücken der „UP“ oder „DOWN“ Taster die Dämpfungbeeinflusst werden. Es können insgesamt 29 verschiedene Einstellungen angewählt werden. Ausgehend vonder mittleren Grundstellung kann die Dämpfung durch Betätigung des „UP“ Tasters jedes mal um den Faktor1.1 erhöht bzw. durch Betätigung des „DOWN“ Tasters um den gleichen Faktor vermindert werden.Achtung: Bei jeder Änderung durch die Taster „UP“ oder „DOWN“ wird der neue Wert gespeichert. DieseSpeicherung bleibt auch bei Stromausfall erhalten.Der <strong>Stellungsregler</strong> ist während dieser Einstellung angeschlossen und folgt dem anstehenden Eingangssignal.Ist die gewünschte Einstellung der Dämpfung erfolgt, wird durch Drücken der „SET“ Taste derÄnderungsmodus verlassen. Die LED – Anzeige hört auf zu blinken und leuchtet durchgehend auf. Jetzt kannzu einem anderen Parameter gewechselt werden.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 11
4.6 Nicht – lineare KennlinieSoll der digitale <strong>Stellungsregler</strong> mit nicht – linearer Kennlinie betrieben werden, ist die Steckbrückeumzusetzen (siehe Detailansicht aus Bild 12, Seite 7)Steckbrückenpositionfür nicht – lineare KennlinieSteckbrückenpositionfür lineare Kennlinieund der <strong>Stellungsregler</strong> in seine Grundstellung zu bringen (siehe Seite 12, Punkt 5.11 durchführen oderStromzufuhr, auch für evtl. vorhandene Rückmeldung, kurzzeitig unterbrechen). Danach kann eine der 11Kennlinien (siehe Bild 14) ausgewählt werden.Befindet man sich im Änderungsmodus (CURVE – LED blinkt) kann die gewünschte Kurve durch Drücken der„UP“ oder „DOWN“ Taster ausgewählt werden. Werkseinstellung ist die lineare Kurve 0 (siehe Bild 14).Die Kurven befinden sich zwischen zwei festgelegten Punkten, dem LCP*) und dem HCP*). Es ist nichtmöglich eine Stellung anzufahren die unter dem LCP oder über dem HCP liegt. Der <strong>Stellungsregler</strong> solltewährend dieser Einstellung mit einem Eingangssignal betrieben werden, das genau in der Mitte zwischen LCPund HCP liegt, da hier sehr gut die Veränderung durch das Auswählen einer anderen Kurve beobachtetwerden kann.Achtung: Bei jeder Änderung durch die Taster „UP“ oder „DOWN“ wird der neue Wert gespeichert. DieseSpeicherung bleibt auch bei Stromausfall erhalten.Ist die gewünschte Einstellung der Kennlinieerfolgt, wird durch Drücken der „SET“ Tasteder Änderungsmodus verlassen. Die LED –Anzeige hört auf zu blinken und leuchtetdurchgehend auf. Jetzt kann zu einemanderen Parameter gewechselt werden*) LCP = Low Current Point = Endlage bei min. SignalHCP = High Current Point = Endlage bei max. Signal Bild 144.7 Endlage bei min. Signal (LCP) und Endlage bei max. Signal (HCP)Die rechts dargestellte Charakteristik stellt die Grundeinstellungbzw. die Einstellung nach Rücksetzen(siehe 5.11) des <strong>Stellungsregler</strong>s dar.Die Kennlinie des digitalen <strong>Stellungsregler</strong>s kanngenau festgelegt werden, indem zwei Punkte fixiertwerden:die Endlage bei Signal min. (LCP) und die Endlagebei Signal max. (HCP). Jeder Punkt ist durch eineWinkelstellung und ein Signal (mA) definiert. DiesePunkte können beliebig im Drehbereich des Antriebszwischen 0 und 90° und im Signalbereich von 4-20mAliegen. Einzige Voraussetzung ist, dass das Eingangssignalfür HCP mindestens 5mA höher ist als dasEingangssignal für LCP. Um einen möglichstkorrekten Verlauf zu erzielen, sollten die Punkte LCPund HCP so weit als möglich auseinander liegen.Inlinearer und nicht – linearer Ausführung erlaubt dieseArt der Einstellung direkte und reverse Kennliniensowie direkte und reverse split-range Kennlinien zuverwirklichen.Bild 15Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 12
EinstellungsbeispieleLCP (Endlage bei min. Signal) HCP (Endlage bei max. Signal) BeschreibungEingangs-Eingangs-direkt wirkend = normal wirkendsignal (mA) Winkel (°) signal (mA) Winkel (°) reverse wirkend = umgekehrt wirkend4 0 20 90 direkt wirkend, 100% proportional4 90 20 0 reverse wirkend, 100% proportional4 0 12 90 split-range direkt wirkend, 50% proportional4 90 12 0 split-range reverse wirkend, 50% proportional12 0 20 90 split-range direkt wirkend, 50% proportional12 90 20 0 split-range reverse wirkend, 50% proportional4 0 20 45 direkt wirkend, 200% proportional4 45 20 0 reverse wirkend, 200% proportionalSind die Punkte LCP und HCP ausgewählt, der Änderungsmodus eingeschaltet (LED blinkt) und dieLuftversorgung gewährleistet, kann die Stellung mit den „UP“ und „DOWN“ tastern auf das Eingangssignalabgestimmt wereden.Beispiel:Um eine Einstellung für eine direkt wirkende 100% proportionale Charakteristik zu erhalten, muss der LCP aufeine Antriebsposition von 0° und einem Eingangssignal von 4mA und der HCP auf eine Antriebsposition von90° und einem Eingangssignal von 20mAeingestellt werden. Dies geschieht wie folgt:Wählen Sie den LCP – Parameter aus (siehe Punkt 5). Stellen Sie das Eingangssignal auf genau 4mA ein undwechseln Sie in den Änderungsmodus durch Drücken der „SET“ Taste. Blinkt die LED – Anzeige auf, kanndurch Drücken der „UP“ oder „DOWN“ Taster die Antriebsstellung auf 0° eingestellt werden. Bei jedem Druckauf die „UP“ oder „DOWN“ Taster wird eine Bewegung von 0.03% des 90° Winkels bewirkt.Hierdurch ist eine sehr genau Einstellung möglich. Wird die „UP“ oder „DOWN“ Taste länger als eine halbeSekunde gedrückt, bewirkt dies, dass in weniger als 30 Sekunden der komplette Hub des Antriebsdurchgehend durchfahren wird. Ist die gewünschte Position eingestellt, sollte nochmals das Eingangssignalgeprüft werden. Sind die Einstellungen korrekt, wird durch Drücken der „Set“ Taste die Einstellung gespeichertund der Änderungsmodus verlassen. Die LED – Anzeige hört auf zu blinken und leuchtet durchgehend.Um die Einstellungen zu vollenden, muss noch der HCP – Parameter eingestellt werden. Hierzu wird dasEingangssignal auf 20mAeingestellt und der Änderungsmodus durch Drücken der „SET“ Taste aktiviert. Blinktdie LED – Anzeige, wird die Antriebstellung wie oben beschrieben auf 90° eingestellt.Der <strong>Stellungsregler</strong> ist während dieser Einstellung angeschlossen und wird mit dem Eingangssignal versorgt.Er fährt jedoch nicht die vom Eingangssignal geforderte Stellung an, da er sich im Änderungsmodus befindet.Achtung: Bei jeder Änderung durch die Taster „UP“ oder „DOWN“ wird der neue Wert gespeichert. DieseSpeicherung bleibt auch bei Stromausfall erhalten.4.8 Feedback – Potentiometer – EinstellungWird dieser Parameter gewählt, leuchtet die POT – LED – Anzeige durchgehend auf. Ist die Spannung für dasFeedback – Potentiometer genau auf die Ausgangslage des Antriebs abgestimmt, blinkt die LED – Anzeige.Für diesen Parameter gibt es keinen Änderungsmodus. Durch gleichzeitiges Drücken der „UP“ und „SET“Taste wird die automatische Endlageneinstellung aktiviert (siehe 5.9).Um das Feedback – Potentiometer einzustellen, muss der Antrieb in seine Ausgangslage gebracht werdenindem das Eingangssignal des <strong>Stellungsregler</strong>s auf 0mA gesetzt wird. Anschließend wird die Luftzufuhrunterbrochen. Jetzt wird der <strong>Stellungsregler</strong> mit einem Eingangssignal von 4mA (oder mehr, je nachCharakteristik) versorgt. Sollte die LED – Anzeige für das Feedback – Potentiometer durchgehend leuchten,lösen Sie die zwei Klemmschrauben des Feedback – Potentiometers (nur leicht lockern, um die Gegenmutternicht zu verlieren) und drehen Sie das Feedback – Potentiometer vorsichtig bis die LED – Anzeige blinkt. Diesbedeutet, dass das Feedback – Potentiometer korrekt zur Ausgangslage des Antriebs eingestellt ist. Die zweiKlemmschrauben wieder festziehen und darauf achten, dass die LED – Anzeige weiterhin blinkt. Leuchtet dieLED – Anzeige durchgehend auf, ist der o.g. Vorgang zu wiederholen. Ist das Feedback – Potentiometer fertigeingestellt, wird die „DOWN“ Taste betätigt, um den nächsten Parameter anzuwählen.Der <strong>Stellungsregler</strong> wird während der Einstellung mit dem Eingangssignal versorgt und folgt, beianschließender Luftzufuhr, dem Eingangssignal.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 13
4.9 Endlagen – EinstellungDiese Einstellung ist für die automatische Einstellung des <strong>Stellungsregler</strong>s auf die Antriebs- bzw.Ventilendlagen verantwortlich. Durch Anwählen einer der Endlagen – Einstellungen fährt der Antrieb in seineEndlagen und der <strong>Stellungsregler</strong> speichert diese Positionen. Diese Punkte werden dann vom digitalen<strong>Stellungsregler</strong> als LCP und HCP verwendet. Die Werte des Eingangssignals werden durch diese Einstellungnicht verändert.Achtung: War die Wirkrichtung des <strong>Stellungsregler</strong>s vor der Endlagen – Einstellung revers, ist sie auch nachder Endlagen – Einstellung revers.Die Endlagen – Einstellung wird durch gleichzeitiges Drücken der „UP“ und „SET“ Taster im ParameterFeedback – Potentiometer –Einstellung (POT) angewählt. Die LED – Anzeige beginnt zu blinken und derAntrieb läuft sofort von seiner derzeitigen Position in die Endlage. Dort hält er kurz an und fährt dann bis inseine Ausgangslage. Auch dort hält er kurz an und fährt dann in die Position, die er vor der Einstellung derEndlagen hatte zurück.Die Daten der Endlagen werden in dem nichtflüchtigen Memory gespeichert, während der <strong>Stellungsregler</strong> inder Ausgangslage verweilt. Der digitale <strong>Stellungsregler</strong> ist während dieser Einstellung angeschlossen, folgtaber während der Endlagen – Einstellung nicht dem anstehenden Einheitssignal.4.10 Setup – Modus verlassenSind alle Einstellungen vollzogen und ist der Änderungsmodus durch Drücken der „SET“ Taste verlassen,kann in den Standardmodus zurückgekehrt werden indem die „DOWN“ Taste wiederholt gedrückt wird, biskeine LED – Anzeige mehr leuchtet.4.11 Rücksetzen des <strong>Stellungsregler</strong>s in die GrundstellungDer digitale <strong>Stellungsregler</strong> kann jederzeit in seine Grundstellung zurückgesetzt werden. Hierzu werden die„UP“, „DOWN“ und „SET“ Taster gleichzeitig gedrückt. Die Grundeinstellung ist eine 100% proportionaledirektwirkende Bewegung. Der digitale <strong>Stellungsregler</strong> sollte nach dem Rücksetzen umgehend wieder neueingestellt bzw. abgestimmt werden.Achtung: Wenn der digitale <strong>Stellungsregler</strong> in die Grundstellung zurückgesetzt wird, werden diese Daten imnichtflüchtigen Memory gespeichert. Diese Daten bleiben auch bei Stromausfall erhalten.4.12 EEPROM Kontrollsummen FehlerBei jeder Änderung der Einstellung werden die Daten auf ein EEPROM geschrieben und eine Kontroll-summeaus allen EEPROM– Daten berechnet und gespeichert. Tritt bei der Kontrollsummenberechnung eineStromunterbrechung auf, kann es passieren, dass die Daten nicht vollständig oder nicht korrekt gespeichertwerden. Wird nach der Stromunterbrechung die Start – Routine durchgeführt, wird eineKontrollsummenberechnung der auf dem EEPROM gespeicherten Daten durchgeführt. Sind die neuberechnete Kontrollsumme und die schon gespeicherte Kontrollsumme nicht identisch, wechselt der<strong>Stellungsregler</strong> in einen ERROR – Modus und startet nicht in seinen Standard – Modus. Der ERROR – Moduswird angezeigt durch wechselndes Aufleuchten der LED – Anzeigen.Der ERROR – Modus kann nur durch Rücksetzen des <strong>Stellungsregler</strong>s (siehe Punkt 5.11, Seite 12) verlassenwerden. Danach ist der <strong>Stellungsregler</strong> wieder neu einzustellen.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 14
4.13 BewegungsumkehrDer <strong>EL</strong> – <strong>Stellungsregler</strong> kann mit direktem oder reversem Wirkungssinn bestellt werden.Definition:1) doppeltwirkender Antrieb (Drehsinnangaben verstehen sich in der Draufsicht)a) direkt = normal (rechtsdrehend)b) revers = umgekehrt (linksdrehend)2) einfachwirkender Antrieba) Sicherheitsstellung direkt = AUF (Ö)b) Sicherheitsstellung revers = ZU (S)Eine nachträgliche Bewegungsänderung kann wie folgt erreicht werden:Stellen Sie vor Beginn der Arbeit sicher, dass dieEinheit druck- und spannungsfrei ist. Lösen Sie jetztdie Schrauben am Umkehrblock (siehe Bild 11, Seite 5– mechanische Umkehr der Wirkungsrichtung) unddrehen Sie diesen Umkehrblock um 90°. Hierbei istdarauf zu achten, dass die Bohrungen in derGummidichtung und im Gehäuse übereinstimmen.Ziehen sie nun die Schraube wieder fest. Um diePolarität des Rückmeldepotentiometers zu ändern,müssen die Anschlüsse „+5“ und „0V“ (siehe Bild 16)miteinander getauscht werden. Das ist notwendig, dadas Potentiometer sonst nicht richtig arbeiten kann.Am einfachsten lassen sich diese Anschlüsse an derKlemme für das Rückmeldepotentiometer (Bild 16)vertauschen. Schließen Sie das Signal mit 4-20mAsowie die Luftzufuhr an und beaufschlagen Sie den<strong>Stellungsregler</strong> mit 4mA (Antrieb fährt in dieAusgangsposition). Unterbrechen Sie nun die Luftzufuhrund lockern Sie die Klemmverschraubung desPotentiometers. Drehen Sie dieses vorsichtig nachlinks oder rechts, bis die rote POT-LED blinkt (½ - ¾Umdrehung). Nach Wiederherstellung der Luftzufuhrkönnen Sie in die automatische Endlageneinstellungüber den SET UP – Modus, POT gehen. Betätigen Siedie „SET“ und „UP“- Taste gleichzeitig, nun konfiguriertder Antrieb die Endlagen automatisch. Details zumEinstellen des Rückmeldepotentiometers finden Sieunter dem Abschnitt 5.8.+ 5V Anschluss für dasSignal Feedback-PotentiometerOVBild 164.14 Stufenlose Rückmeldung (Option)4.14.1 AnschlussBei eingebauter stufenloser Rückmeldung ist an denKlemmen 3 und 4 (siehe Bild 17) eine Gleichspannungvon 14-30V DC anzulegen. Die durchfließendeStromstärke wird von diesem Schaltkreis auf 4-20mAbegrenzt und ist linear proportional zur Winkelstellung(0-90°) der Welle des <strong>Stellungsregler</strong>s. DieSchaltkreise von Stellsignal und Rückmeldesignal sindgegenseitig elektrisch isoliert und voneinanderunabhängig.+ 1- 2+ 3- 4Bild 17Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 15
4.14.2 Nachträgliche MontageDie Platine der stufenlosen Rückmeldung liegt unterhalbder Hauptplatine. Bei nachträglicher Montage istdie Hauptplatine auszubauen und die Rückmeldeplatinean dem dafür vorgesehenen Abstandshalternzu befestigen. Der 3-polige Steckverbinder und die beidenfreien Adern werden zur Oberseite der Hauptplatinedurchgeschleift. Der Steckverbinder gehört indie 3-polige Steckerleiste neben dem Potentiometer(siehe Bild 18), die beiden Adern in die Klemmen 3 und4 der 4-poligen Klemmleiste (siehe Bild 17).Anschlussstecker für die Optionstufenlose RückmeldungBild 184.14.3 EinstellungenNullpunkt und Bereich können mittels eines feinenSchraubendrehers korrigiert werden. Die beidenkleinen Potentiometer sind über die entsprechendenBohrungen in der Hauptplatine (siehe Bild 19)zugänglich.Dazu ist wie folgt vorzugehen:<strong>Stellungsregler</strong> und Rückmeldung komplett anschliessen.<strong>Stellungsregler</strong> in die Ausgangsstellung(Signal normalerweise 4mA) fahren. Anzeige über dasNullpunktpotentiometer entsprechend korrigieren.Danach den <strong>Stellungsregler</strong> in die Endlage(normalerweise 20mA) fahren Anzeige über dasBereichspotentiometer korrigieren. In beidenStellungen die Anzeige nochmals überprüfen und ggf.korrigieren, da eine Veränderung der Bereichseinstellunggeringfügig die Nullpunkteinstellungbeeinflusst. Die Platine der Rückmeldung besitzt einekleine Steckbrücke,zugänglich nach Demontage*) der Hauptplatine. DieseSteckbrücke sollte umgesetzt werden, wenn derArbeitswinkel statt der üblichen 90° nur etwa 45°beträgt und der volle Signalbereich von 4-20mA zurAnzeige dieses reduzierten Winkels benötigt wird.Bereichseinstellung bei derOption stufenlose RückmeldungNullpunkteinstellung bei derOption stufenlose RückmeldungBild 19*) Montageanweisungen für den <strong>Stellungsregler</strong> auf den Seiten 4-6 sinngemäß beachten.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 16
5.0 Wartung und FehlersucheDer digitale <strong>Stellungsregler</strong> von <strong>KINETROL</strong> ist wartungsfrei und langlebig unter der Voraussetzung, dass dieZuluft sauber, trocken und ölfrei (Instrumentenluft) und das elektrische Signal rauschfrei und frei vonSpannungsspitzen ist.Achten sie lediglich darauf, dass bei Demontage des Deckels das Fett für die Abdichtung derWellendurchführung nicht entfernt wird.Die nachstehende Tabelle zur Fehlersuche und Fehlerbeseitigung kann nur bei einfachen Problemen vonHilfe sein. Bei komplexeren Fehlern wenden Sie sich bitte an uns oder an den Hersteller, die<strong>KINETROL</strong> Ltd., Trading Estate, Farnham, Surrey GU9 9NU, EnglandTel.: 0 12 52 / 73 38 38Fax.: 0 12 52 / 1 30 42ProblemAntrieb dreht nicht, obwohl Zuluft und Signal korrektangeschlossen sindAntrieb dreht langsamer als zu erwarten wäreEinschwingvorgänge beim Erreichen derSollpositionÜberschießen der SollpositionTräges AnsprechverhaltenAbhilfe- Luftdruck prüfen – über 3.5bar?- Signal 4-20mA, richtig gepolt?- Abtriebsmoment ausreichend zur Betätigung?- Anbaumodule im gleichen Drehsinn montiert?- Wurde das Feedback – Potentiometerverstellt oder muss es verstellt werden- Ist die Zuluft sauber, trocken und ölfrei?- Zuluftdruck überprüfen- Stellung der beiden Entlüftungsdrosselnüberprüfen- Ist die Zuluft sauber, trocken und ölfrei?- Dämpfung vergrößern und / oderProportionalbereich vergrößern (siehe Seite 8,Punkt 2.2.1 und 2.2.2)- Dämpfung vergrößern (siehe Seite 8, Punkt2.2.1 und 2.2.2)- Proportionalbereich verkleinern, danachDämpfung korrigieren (siehe Seite 8, Punkt2.2.1 und 2.2.2)Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 17
Anhang AEinstellen bzw. Abstimmen des eigensicheren <strong>EL</strong>-<strong>Stellungsregler</strong>sDieses Beispiel veranschaulicht den kompletten Ablauf vom Rücksetzen des <strong>Stellungsregler</strong>s in seineGrundeinstellung bis zum Einstellen und Abstimmen, um aus einem direkt wirkenden <strong>Stellungsregler</strong> einenrevers wirkenden <strong>Stellungsregler</strong> zu erhalten.Schritt Beschreibung Vorgehensweise Ergebnis der Einstellung1Rücksetzen des<strong>Stellungsregler</strong>sTaster gleichzeitigdrücken2Proportionalbereicheinstellensiehe Anhang B3 Dämpfung einstellen siehe Anhang C4Einstellen des LCP *)auf 90° bei 4mAsiehe Anhang D5Einstellen des HCP *)auf 0° bei 20mAsiehe Anhang DAchtung: Wenn der <strong>Stellungsregler</strong> bereits für ein optimales Regelverhalten eingestellt war, können dieSchritte 1-3 übergangen werden. LCP und HCP sind dann ggf. entsprechend Anhang B zu korrigieren.*) LCP = Endstellung bei Signalminimum**) HCP = Endstellung bei SignalmaximumIrrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 18
Anhang BEinstellen des Parameters „Proportionalbereich“Schritt Beschreibung Vorgehensweise LED - Anzeige1 Setup – Modus wählenTaster gleichzeitigdrückenLED – Anzeige „PBAND“ leuchtet2Änderungs - ModuswählenLED – Anzeige „PBAND“ blinkt3 Kennlinie wählen oder LED – Anzeige „PBAND“ blinkt4Änderungs - ModusverlassenLED – Anzeige „PBAND“ leuchtet5 Setup - Modus verlassen LED – Anzeige „PBAND“ erlischtAchtung: Es kann notwendig sein, dass bei Verringerung des Proportionalbereiches die Dämpfungverstärkt werden muss, um ein optimales Regelverhalten des <strong>Stellungsregler</strong>s zu erreichen. Kann der<strong>Stellungsregler</strong> eine Sollposition nicht ohne Überschießen anfahren und oszilliert er für kurze Zeit, kann diesdurch Erhöhen der Dämpfung beseitigt werden.Danach kann eine weitere Verkleinerung des Proportionalbereiches möglich sein.Merke: Ein kleiner Proportionalbereich erhöht die Regelgenauigkeit, kann aber zu einem unruhigenVerhalten des Stellgliedes führen.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 19
Anhang CEinstellen des Parameters „Dämpfung“Schritt Beschreibung Vorgehensweise LED - Anzeige1 Setup – Modus wählenTaster gleichzeitigdrückenLED – Anzeige „PBAND“ leuchtet2DämpfungsparameterwählenLED – Anzeige „DAMP“ leuchtet3Änderungs - ModuswählenLED – Anzeige „DAMP“ blinkt4 Dämpfung einstellen oder LED – Anzeige „DAMP“ blinkt5Änderungs - ModusverlassenLED – Anzeige „DAMP“ leuchtet6Setup – ModusverlassenLED – Anzeige „PBAND“ leuchtetLED – Anzeige „PBAND“ erlischtAchtung: Es kann notwendig sein, dass bei Verringerung des Proportionalbereichs die Dämpfung verstärktwerden muss, um ein optimales Regelverhalten des <strong>Stellungsregler</strong>s zu erreichen. Kann der <strong>Stellungsregler</strong>eine Sollposition nicht ohne Überschiessen anfahren und oszilliert er für kurze Zeit, kann dies durch Erhöhender Dämpfung beseitigt werden.Bei zu stark eingestellte Dämpfung (überdämpftes Verhalten) fährt der Antrieb seine Sollposition sehr langsaman.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 20
Anhang DEinstellen der EndlagenIm folgendem wird der Ablauf der Parametereinstellung LCP (Endlage bei Signalminimum) beschrieben.Das Verfahren zur Parametereinstellung HCP (Endlage bei Signalmaximum) ist sinngemäß identisch.Schritt Beschreibung Vorgehensweise LED - Anzeige1 Setup – Modus wählenTaster gleichzeitig LED – Anzeige „PBAND“ leuchtetdrücken2 Parameter LCP wählenLED – Anzeige „DAMP“ leuchtetLED – Anzeige „CURVE“ leuchtetLED – Anzeige „LOW“ leuchtet3456Antriebsposition in dieNähe der benötigtenLCP Endlage bringenÄnderungs - ModuswählenEingangssignal auf denbenötigten LCP Wertein- stellenAntrieb in die Soll –Endlage für LCP bringenEingangssignalkorrigieren oder Antriebsposition ändert sichLED – Anzeige „LOW“ blinktLED – Anzeige „LOW“ blinkt(Position bleibt unverändert)LED – Anzeige „LOW“ blinkt7Änderungs – ModusverlassenLED – Anzeige „LOW“ leuchtet8Setup – ModusverlassenLED – Anzeige „CURVE“ leuchtetLED – Anzeige „DAMP“ leuchtetLED – Anzeige „PBAND“ leuchtetLED – Anzeige „PBAND“ erlischtAchtung: Wird bei Schritt 6 die „UP“ oder „DOWN“ Taste länger als eine halbe Sekunde durchgehendbetätigt, bewirkt dies, dass in weniger als 30 Sekunden der komplette Hub des Antriebs durchfahren wird.Irrtum und Änderungen vorbehaltenBedienungs- und Wartungsanleitung <strong>KINETROL</strong>-<strong>EL</strong>-<strong>Stellungsregler</strong> deutsch Ausgabe 0509.docSeite 21