1 Ãberblick über die Sensorik
1 Ãberblick über die Sensorik
1 Ãberblick über die Sensorik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Seite 137<br />
272 5.3 Spulen 5.3.2 Sättigungskernverfahren 273<br />
vorhandenen Leiterbahnen durchgeätzt. Im nächsten Schritt wird wieder eine Metallschicht<br />
für <strong>die</strong> obere Verdrahtungsebene abgeschieden (i) und in Leiterbahnen so<br />
strukturiert, daß beide Verdrahtungsebenen zusammen eine Spule bilden (j und k),<br />
d.h. <strong>die</strong> Kontaktflächen der oberen und unteren Leiterbahnen werden versetzt miteinander<br />
verbunden.<br />
Der Aufbau von Sensorspulen mit hochpermeablem Kern führt – im Vergleich zu Luftspulen<br />
– zu kürzeren Drahtlängen und damit zu einem geringeren Rauschen. Sekundäreigenschaften<br />
der Permeabilität, sowie der geometrischen Aufbau des Spulenkerns können<br />
zu einer Nichtlinearität der Sensorkennlinie und einer zusätzlichen Frequenz- und<br />
Temperaturabhängigkeit führen.<br />
Bei Anwesenheit eines Spulenkerns der relativen Permeabilität µ rc wird <strong>die</strong> magnetische<br />
Induktionsflußdichte (2) um den Faktor µ rc verstärkt, d.h. als Amplitude U o der<br />
induzierten Spannung ergibt sich analog zu (3) und (4):<br />
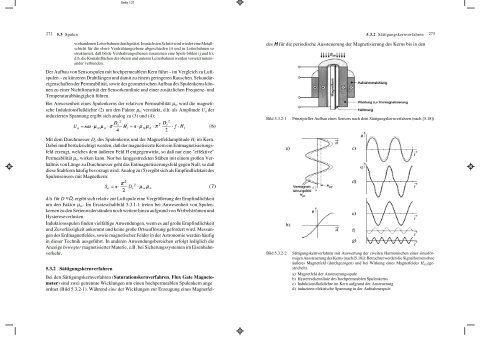
Bei den Sättigungskernverfahren (Saturationskernverfahren, Flux Gate Magnetometer)<br />
sind zwei getrennte Wicklungen um einen hochpermeablen Spulenkern ange<br />
ordnet (Bild 5.3.2-1). Während eine der Wicklungen zur Erzeugung eines Magnetfeldes<br />
H für <strong>die</strong> periodische Aussteuerung der Magnetisierung des Kerns bis in den<br />
Bild 5.3.2-1 Prinzipieller Aufbau eines Sensors nach dem Sättigungskernverfahren (nach [5.18])<br />
Mit dem Durchmesser D c des Spulenkerns und der Magnetfeldamplitude H i im Kern.<br />
Dabei muß berücksichtigt werden, daß der magnetisierte Kern ein Entmagnetisierungsfeld<br />
erzeugt, welches dem äußeren Feld H entgegenwirkt, so daß nur eine "effektive"<br />
Permeabilität µ rc wirken kann. Nur bei langgestreckten Stäben mit einem großen Verhältnis<br />
von Länge zu Durchmesser geht das Entmagnetisierungsfeld gegen Null, so daß<br />
<strong>die</strong>se Stabform häufig bevorzugt wird. Analog zu (5) ergibt sich als Empfindlichkeit des<br />
Spulensensors mit Magnetkern:<br />
d.h. für D ≈ D c ergibt sich relativ zur Luftspule eine Vergrößerung der Empfindlichkeit<br />
um den Faktor µ rc . Im Ersatzschaltbild 5.3.1-1 treten bei Anwesenheit von Spulenkernen<br />
zu den Serienwiderständen noch weitere hinzu aufgrund von Wirbelströmen und<br />
Hystereseverlusten.<br />
Induktionsspulen finden vielfältige Anwendungen, wenn es auf große Empfindlichkeit<br />
und Zuverlässigkeit ankommt und keine große Ortsauflösung gefordert wird. Messungen<br />
des Erdmagnetfeldes, sowie magnetischer Felder in der Astronomie werden häufig<br />
in <strong>die</strong>ser Technik ausgeführt. In anderen Anwendungsbereichen erfolgt lediglich <strong>die</strong><br />
Anzeige bewegter magnetisierter Materie, z.B. bei Sicherungssystemen im Eisenbahnverkehr.<br />
5.3.2 Sättigungskernverfahren<br />
Bild 5.3.2-2<br />
Sättigungskernverfahren mit Auswertung der zweiten Harmonischen einer sinusförmigen<br />
Aussteuerung des Kerns (nach [5.18]): Betrachtet werden <strong>die</strong> Signalformen ohne<br />
äußeres Magnetfeld (durchgezogen) und bei Wirkung eines Magnetfeldes H ext (gestrichelt).<br />
a) Magnetfeld der Ansteuerungsspule<br />
b) Hysteresekennlinie des hochpermeablen Spulenkerns<br />
c) Induktionsflußdichte im Kern aufgrund der Ansteuerung<br />
d) induzierte elektrische Spannung in der Aufnahmespule