Synchronmaschinen
Synchronmaschinen
Synchronmaschinen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
7. <strong>Synchronmaschinen</strong><br />
<strong>Synchronmaschinen</strong> wurden zunächst als Einphasengeneratoren gebaut, die etwa ab der Mitte des<br />
19. Jahrhunderts zur Versorgung von Beleuchtungsanlagen Anwendung fanden. Den ersten<br />
dreiphasigen Synchrongenerator entwickelten 1887 unabhängig voneinander Bradley und<br />
Haselwander. In der Folgezeit bildeten sich mit der Schenkelpolmaschine und dem Turbogenerator<br />
die typischen Bauformen aus. Die weitere Entwicklung der Synchronmaschine ist eng mit<br />
dem Ausbau der elektrischen Energieversorgung zu immer größeren Generator-Einheitsleistungen<br />
verbunden.<br />
Synchronmotoren wurden schon immer als Industrieantriebe eingesetzt, wenn man eine konstante<br />
Antriebsdrehzahl benötigte oder wenn man die Möglichkeit des Phasenschieberbetriebs nutzen<br />
wollte.<br />
Drehstrom-Synchrongeneratoren besitzen die größten Einheitsleistungen elektrischer Maschinen.<br />
Als Turbogeneratoren für Wärmekraftwerke werden derzeit zweipolige Generatoren mit<br />
Leistungen von rd. 1200 MVA bei 50 Hz und 21 kV Nennspannung gefertigt. Bei vierpoligen<br />
Maschinen liegen die Daten sogar bei rd. 1700 MVA und 27 kV. Die größten Schenkelpolmaschinen<br />
für Wasserkraftwerke erreichen über 800 MVA mit bis zu 80 Einzelpolen.<br />
Als Industrieantrieb hat die Synchronmaschine durch die Entwicklung der Frequenzumrichter<br />
stark an Bedeutung gewonnen. Sie steht dadurch als drehzahlregelbarer Antrieb vom Bereich des<br />
Servomotors mit permanenter Erregung durch Dauermagnete bis zu den größten Leistungen<br />
(30 MW) zur Verfügung.<br />
7.1 Aufbau und Wirkungsweise<br />
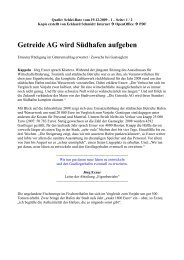
Die wesentlichen Unterschiede im Aufbau gleichstromerregter <strong>Synchronmaschinen</strong> bestehen in<br />
der Konstruktion zur Erzeugung des Erregergleichfeldes.<br />
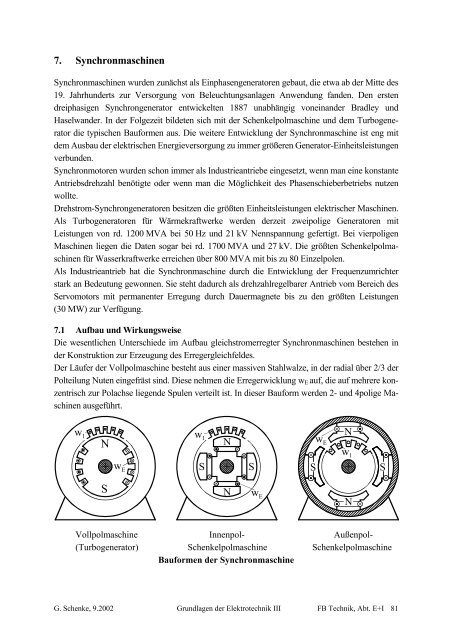
Der Läufer der Vollpolmaschine besteht aus einer massiven Stahlwalze, in der radial über 2/3 der<br />
Polteilung Nuten eingefräst sind. Diese nehmen die Erregerwicklung w E auf, die auf mehrere konzentrisch<br />
zur Polachse liegende Spulen verteilt ist. In dieser Bauform werden 2- und 4polige Maschinen<br />
ausgeführt.<br />
w 1 w 1<br />
w E<br />
N<br />
N<br />
N<br />
w E<br />
w 1<br />
w E<br />
S S S S<br />
S<br />
N<br />
N<br />
Vollpolmaschine Innenpol- Außenpol-<br />
(Turbogenerator) Schenkelpolmaschine Schenkelpolmaschine<br />
Bauformen der Synchronmaschine<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 81
Regler<br />
V2<br />
Innenpol-Schenkelpolmaschinen besitzen den gleichen Ständeraufbau wie Vollpolmaschinen, im<br />
Läufer dagegen ausgeprägte Einzelpole zur Erzeugung des Gleichfeldes. Wie bei Gleichstrommaschinen<br />
liegt um jeden Polkern eine Erregerwicklung w E , während zum Luftspalt hin durch<br />
den Polschuh eine möglichst sinusförmige Feldform angestrebt wird.<br />
Die Außenpol-Schenkelpolmaschine ist ähnlich einer Gleichstrommaschine aufgebaut, nur trägt<br />
der Läufer eine Drehstromwicklung w 1 , deren Anschlüsse über Schleifringe zugänglich sind.<br />
Der Ständer der Synchronmaschine besteht wie bei der Asynchronmaschine aus einer<br />
geschweißten Tragkonstruktion zur Aufnahme des geschichteten Blechpaketes. Die meist offenen<br />
Nuten entlang der Ständerbohrung nehmen die Drehstromwicklung auf, die bei größeren Leistungen<br />
als Hochspannungswicklung ausgeführt ist.<br />
Mit Rücksicht auf einen guten Wirkungsgrad verwendet man bei Generatoren Dynamobleche mit<br />
niedrigen Verlustziffern bis hinab zu v 10 = 1 W/kg. Auch kornorientierte Bleche werden bereits<br />
eingesetzt.<br />
Für den Betrieb einer elektrisch erregten Synchronmaschine und speziell im Einsatz als Drehstromgenerator<br />
benötigt man für die Läuferwicklung einen einstellbaren Gleichstrom. Dieser wird<br />
durch das Erregersystem geliefert, dessen Regeleinrichtungen vor allem die Spannungshaltung<br />
und die Blindlaststeuerung im stationären und dynamischen Betrieb (Laststöße) übernehmen.<br />
Die erforderlichen Erregerleistungen erstrecken sich für zweipolige Turbogeneratoren von rd.<br />
3 kW bei 100 kW bis 4 MW bei einer 1000-MVA-Maschine.<br />
Je nach Leistung der Synchronmaschine, haben sich für das Erregersystem verschiedene Techniken<br />
herausgebildet. Die früher allgemein angewandte Erregertechnik, eine direkt angekuppelte<br />
Gleichstromhaupt- mit Hilfserregermaschine, läßt sich mit Rücksicht auf die mechanische und<br />
elektrische Belastung des Ankers nur bis zu Einheitsleistungen der Synchronmaschine von rd.<br />
150 MVA ausführen. Dem Spannungsregler steht die konstante Ankerspannung des Hilfsgenerators,<br />
der selbsterregt ist, hierbei zur Verfügung.<br />
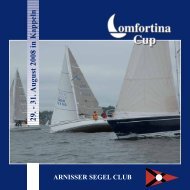
Modernere Erregersysteme basieren auf Schaltungen der Leistungselektronik und stehen bis zu<br />
den höchsten Leistungen zur Verfügung. Heute wird vorwiegend in allen Leistungsbereichen der<br />
schleifringlose Außenpol-Drehstromerregergenerator mit rotierendem Diodengleichrichter eingesetzt.<br />
SM Synchronmaschine<br />
G1 Außenpol-Drehstromerregermaschine<br />
G2 Hilfserregermaschine<br />
mit Dauermagnetläufer<br />
V1 Mitrotierender<br />
Diodengleichrichter<br />
V2 Thyristorstromrichter<br />
I E<br />
SM V1 G1 G2<br />
Synchronmaschine mit<br />
schleifringloser<br />
Erregereinrichtung<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 82
Der Synchrongenerator kann sich auch selbst erregen, wenn man seine Klemmenspannung über<br />
Gleichrichter zur Erzeugung des Erregerstromes heranzieht. Darüberhinaus kann auch die zur<br />
Spannungshaltung erforderliche verstärkte Erregung bei Belastung selbsttätig durch eine Kompoundierung<br />
bereitgestellt werden. <strong>Synchronmaschinen</strong> mit einem derartigen Erregersystem<br />
werden als "Konstantspannungsgeneratoren" bezeichnet und beispielsweise zur Versorgung von<br />
Schiffsbordnetzen eingesetzt.<br />
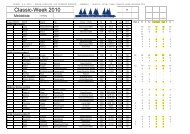
Die Fortschritte in der Dauermagnettechnik haben die Entwicklung dauermagneterregter<br />
Synchronmotoren gefördert. In Verbindung mit Zwischenkreisumrichtern werden sie als Einzelund<br />
Gruppenantriebe im unteren Leistungsbereich (bis 100 kW) sowie zu Positionieraufgaben<br />
eingesetzt. Verschiedene Läuferkonstruktionen mit Ferrit- oder auch Seltenerd-Kobaltmagneten<br />
sind bereits realisiert worden. Dauermagneterregte <strong>Synchronmaschinen</strong> mit kleinem Trägheitsmoment<br />
werden bei Antrieben mit kurzen Stellzeiten (Servoantrieben) eingesetzt.<br />
S<br />
N<br />
S<br />
3<br />
4<br />
N<br />
S<br />
S<br />
N<br />
2<br />
N<br />
N 1<br />
N S<br />
1<br />
2<br />
1<br />
S<br />
N<br />
Vierpoliger Läufer Achtpoliger Läufer Sechspoliger Läufer mit<br />
mit Dämpferkäfig<br />
geringem Trägheitsmoment<br />
1 Rechteckmagnete, 2 Weicheisen 1 Rechteckmagnete 1 Seltenerd-Kobaltmagnete<br />
3 Luftspalt, 4 Dämpferkäfig 2 Weicheisenpole<br />
Konstruktion dauermagneterregter Läufer von Synchronmotoren<br />
N<br />
S<br />
S<br />
N<br />
S<br />
7.2 Betriebsverhalten der Synchronmaschine<br />
Da die Erregerwicklung beim Vollpoläufer auf eine Anzahl Nuten verteilt ist, erhält die Durchflutung,<br />
und wegen des konstanten Luftspaltes auch die Feldkurve, einen treppenförmigen Verlauf.<br />
V E<br />
τ P<br />
Felderregerkurve V E eines Vollpolläufers<br />
Durch entsprechende Auslegung der Ständerwicklung können die Wicklungsfaktoren für die<br />
Oberschwingungen klein gehalten werden, so daß nahezu eine sinusförmige Spannungskurve<br />
erreicht wird.<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 83
Der Effektivwert der induzierten Spannung ist durch die zeitlich sinusförmige Verkettung des<br />
Hauptfeldes mit dem Wicklungsstrang gegeben. Es gilt entsprechend Gl. (5.18):<br />
U<br />
q<br />
= 4,44 ⋅ f ⋅ w ⋅ ξ ⋅ Φ<br />
(7.1)<br />
1<br />
1<br />
1<br />
h<br />
Wird die Synchronmaschine belastet, so führt die Ständerwicklung Strom und baut im Zusammenwirken<br />
der drei Wicklungsstränge eine eigene Drehdurchflutung auf. Diese rotiert mit<br />
n 1 = f 1 /p und daher synchron mit dem Läufer und dessen Durchflutung. Beide Anteile können<br />
infolgedessen zu einem resultierenden Wert zusammengefaßt werden. Es gilt:<br />
Θ µ = Θ + Θ<br />
(7.2)<br />
E<br />
1<br />
Man bezeichnet die Beeinflussung des Luftspaltfeldes durch den Belastungsstrom wie bei der<br />
Gleichstrommaschine als Ankerrückwirkung.<br />
Anstelle der Addition der Drehdurchflutungen kann man auch direkt die Stromzeiger zusammensetzen,<br />
wenn man den Ständerstrom I 1 in einen äquivalenten Erregerstrom I 1 umformt. Für die<br />
Ständerdrehdurc '<br />
hflutung gilt nach (5.13):<br />
2 ⋅ 2 w1<br />
⋅ ξ1<br />
Θ 1 = ⋅ m ⋅ ⋅ I1<br />
(7.3)<br />
π p<br />
Für die Grundwelle der Treppendurchflutung der Erregerwicklung erhält man:<br />
4 w E ⋅ ξE<br />
ΘE<br />
= ⋅ IE<br />
(7.4)<br />
π p<br />
Damit erhält man den Magnetisierungsstrom I µ :<br />
' m ⋅ w1<br />
⋅ ξ1<br />
Iµ = I E + I1<br />
= IE<br />
+<br />
⋅ I1<br />
(7.5)<br />
2 ⋅ w ⋅ ξ<br />
E<br />
E<br />
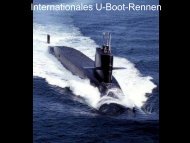
Unter Berücksichtigung des ohmschen Wicklungswiderstandes R 1 , des Streublindwiderstandes<br />
X 1σ und der Hauptreaktanz X h läßt sich das komplette Zeigerdiagramm mit der sogenannten<br />
ideellen Polradspannung U p , der induzierten Spannung U q und der Klemmenspannung U 1 angeben.<br />
U p<br />
jX h·I 1<br />
jX 1σ·I 1<br />
R 1·I 1<br />
U<br />
U q<br />
X h · I 1<br />
I 1<br />
' I µ<br />
U q = f(I E )<br />
I E<br />
U p U q<br />
ϑ U 1<br />
I E<br />
I 1<br />
'<br />
I µ<br />
I 1<br />
Im Betriebspunkt linearisierte Kennlinie Vollständiges Zeigerdiagramm des<br />
Synchrongenerators bei ohmsch-induktiver Last<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 84
Über das Zeigerdiagramm läßt sich die Spannungsgleichung der Synchronmaschine angeben.<br />
U = U + I1<br />
⋅ [R1<br />
+ j⋅<br />
(Xh<br />
+ X1<br />
)]<br />
(7.6)<br />
1 P<br />
σ<br />
Hauptreaktanz und Streureaktanz werden zur Synchronreaktanz zusammengefaßt.<br />
X = X + X<br />
(7.7)<br />
d<br />
h<br />
1σ<br />
I 1<br />
R 1<br />
X 1σ X h<br />
U q U p<br />
~<br />
U 1<br />
I E<br />
Ersatzschaltbild der Synchronmaschine<br />
Die Belastungskennlinie U 1 = f{I 1 } läßt sich über das Ersatzschaltbild des Generators berechnen,<br />
wobei man üblicherweise bei größeren Maschinen den relativ sehr kleinen Ständerwiderstand R 1<br />
vernachläßigt.<br />
jX h·I k<br />
U p<br />
Wird eine Synchronmaschine im Inselbetrieb erregt<br />
und ständerseitig dreipolig kurzgeschlossen, so wird<br />
der Generator mit der Quellenspannung U p durch den<br />
Blindwiderstand X d belastet.<br />
U q<br />
I k<br />
I µ<br />
I k<br />
'<br />
I E<br />
Zeigerdiagramm für<br />
Dauerkurzschluß<br />
Die Kennlinien des Generator für Leerlauf und Kurzschluß lassen sich in einem Diagramm<br />
zusammenfassen. Dabei arbeitet man im allgemeinen mit relativen Werten und definiert:<br />
U<br />
I<br />
I<br />
q<br />
k<br />
E<br />
u q = ik<br />
= iE<br />
=<br />
(7.8)<br />
U N<br />
I N<br />
IE0<br />
Wird der Generator aus dem Leerlauf heraus bei Nennspannung kurzgeschlossen, so fließt nach<br />
dem Ausgleichsvorgang der Kurzschlußstrom I k0 . Bezieht man diesen Wert auf den Nennstrom so<br />
erhält man das Leerlauf-Kurzschlußverhältnis (X dges -gesättigter Wert).<br />
I<br />
U<br />
X<br />
Z<br />
1<br />
k0 N dges N<br />
K C = =<br />
= =<br />
(7.9)<br />
I N U N ZN<br />
Xdges<br />
xdges<br />
Das Leerlaufkurzschlußverhältnis K c liegt bei Turbogeneratoren im Bereich 0,4 bis 0,65. Beim<br />
Kurzschluß eines mit Nenspannung leerlaufenden Synchrongenerators erreicht der Dauerkurz-<br />
I k0 im Ständer somit nicht einmal den Wert des Nennstromes I N schlußstrom .<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 85
1,2<br />
A<br />
1,0<br />
u , i k<br />
0,8<br />
i µ<br />
0<br />
G<br />
i k<br />
'<br />
i Ek<br />
H<br />
0,6<br />
u q<br />
0,4<br />
0,2<br />
A<br />
i k<br />
Bestimmung des<br />
Potier-Dreiecks<br />
0<br />
G<br />
i 1<br />
µ i k<br />
' 2 i E<br />
3<br />
H<br />
i Ek<br />
i EÜ<br />
Im allgemeinen ist die Synchronmaschine auf ein Netz geschaltet, dessen Spannung und Frequenz<br />
konstant gehalten werden und für die einzelne Maschine damit fest vorgegeben ist.<br />
Eine leerlaufende Synchronmaschine geht in den Generatorbetrieb über, wenn man ihrer Welle<br />
ein erhöhtes Antriebsmoment zuführt. Wird sie dagegen mechanisch belastet, so bezieht sie als<br />
Motor eine entsprechende Energie aus dem Netz.<br />
Mit der Erregung läßt sich die Blindleistungsbilanz beeinflussen; bei Übererregung gibt sie induktiven<br />
Blindstrom ab und bei Untererregung nimmt sie induktiven Blindstrom auf.<br />
Bei der Erstellung der Betriebsdiagramme der Synchronmaschine wird im allgemeinen der<br />
ohmsche Spannungsverlust vernachlässigt. Aus Gl. (7.6) und (7.7) läßt sich der Strom der<br />
Maschine angeben.<br />
U1<br />
U P<br />
I1<br />
= - j⋅ + j⋅<br />
(7.10)<br />
Xd<br />
Xd<br />
jX d·U 1<br />
U 1<br />
U q<br />
U p<br />
jX d·U 1<br />
Vierquadrantenbetrieb der<br />
Synchronmaschine am Netz<br />
ϑ<br />
I 1<br />
I µ<br />
I<br />
I 1<br />
'<br />
E<br />
Motorbetrieb<br />
ϑ<br />
U 1 U q<br />
I 1 U p<br />
I µ<br />
I E I 1<br />
'<br />
Übererregung<br />
Untererregung<br />
U p<br />
jX d·U 1<br />
U q<br />
U 1<br />
ϑ<br />
I E<br />
I 1<br />
'<br />
I µ<br />
I 1<br />
jX d·U 1<br />
Generatorbetrieb<br />
ϑ<br />
U q<br />
U p<br />
U 1<br />
I E I 1<br />
'<br />
I µ<br />
I 1<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 86
Motor<br />
U 1<br />
U p<br />
j<br />
X d<br />
0,6<br />
I 1<br />
ϕ<br />
ϑ < 90°<br />
stabil<br />
ϑ > 90°<br />
instabil<br />
1,0<br />
U p /U N = 1,4<br />
Legt man den Zeiger U 1 in<br />
die reelle senkrechte Achse,<br />
so erhält man mit Gl. (7.10)<br />
als Ortskurve des Ständerstromes<br />
einen Kreis des<br />
Radius U p /X d um die Spitze<br />
des Zeigers -jU 1 /X d .<br />
ϑ<br />
Generator<br />
-j<br />
U 1<br />
X d<br />
Stromortskurve der Vollpolmaschine<br />
bei R 1 = 0<br />
Nach der Stromortskurve gilt für die Wirkkomponente des Ständerstromes:<br />
U P<br />
I1 ⋅ cosϕ1<br />
= - ⋅ sinϑ<br />
(7.11)<br />
X<br />
d<br />
Für die Ständerwirkleistung folgt:<br />
U P<br />
P1 = m ⋅ U1<br />
⋅ I1<br />
⋅ cosϕ1<br />
= - m ⋅ U1<br />
⋅ ⋅ sin ϑ<br />
(7.12)<br />
X<br />
d<br />
Das innere Drehmoment M i der Synchronmaschine verläuft als Funktion des Polradwinkels ϑ<br />
sinusförmig (7.13).<br />
M<br />
i<br />
m ⋅ U1<br />
= -<br />
2π<br />
⋅ n<br />
1<br />
⋅ U<br />
⋅ X<br />
P<br />
d<br />
⋅ sin ϑ<br />
(7.13)<br />
Im Nennbetrieb erreichen Turbogeneratoren etwa einen Polradwinkel bis 30° und Schenkelpolmaschinen<br />
einem Winkel von 20 bis 25°. Das Kippmoment beträgt damit rd. das 2fache Nennmoment.<br />
Das Leistungsdiagramm ergibt sich aus der Stromortskurve, wenn man diese mit dem<br />
Faktor m · U 1 multipliziert.<br />
I EN<br />
2<br />
P/S N<br />
x d = 1,23 cosϕ N = 0,8<br />
0,8 I E0<br />
I 1 /I N 3<br />
ϕ N<br />
1<br />
4<br />
ϑ N I Emin<br />
-1 -0,5 0 0,5 1/x d<br />
1<br />
Q/S N<br />
Grenzlinien für Dauerbetrieb<br />
1 maximaler Erregerstrom<br />
2 maximaler Ständerstrom<br />
3 maximaler Polradwinkel<br />
4 minimaler Erregerstrom<br />
Leistungsdiagramm der<br />
Synchronmaschine<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 87
7.3 Sonderbauarten von <strong>Synchronmaschinen</strong><br />
Reluktanzmotoren<br />
Die Schenkelpolmaschine entwickelt ohne Gleichstromerregung das Reaktionsmoment M R mit<br />
der sie als Motor belastet werden kann.<br />
M<br />
R<br />
2<br />
m ⋅ U1<br />
= -<br />
4π<br />
⋅ n<br />
1<br />
⎛<br />
⋅ ⎜<br />
⎝<br />
1<br />
X<br />
q<br />
-<br />
1<br />
X<br />
d<br />
⎞<br />
⎟ ⋅ sin 2ϑ<br />
⎠<br />
(7.14)<br />
Diese Erscheinung wird zum Bau von Reluktanzmotoren ausgenutzt, die man aus normalen<br />
Asynchronmaschinen mit Kurzschlußläufern entwickelt hat.<br />
Durch Aussparungen im Läufereisen erhält der magnetische Widerstand (Reluktanz) längs des<br />
Umfangs verschiedene Werte, so daß je eine Achse maximalen und minimalen Leitwertes und<br />
damit zwei Ständerreaktanzen X d und X q < X d entstehen.<br />
Der Anlauf des Reluktanzmotors erfolgt wie der eines normalen Kurzschlußläufermotors über die<br />
Käfigwicklung. In der Nähe der Synchrondrehzahl fällt der Läufer bei einem Intrittfallmoment<br />
M S in Tritt (er synchronisiert) und kann danach bis zu einem Außertrittfallmoment M As > M S bei<br />
synchroner Drehzahl belastet werden.<br />
Die abgegebene Leistung des Reluktanzmotors, der bis 10 kW gebaut wird, erreicht rd. 50 % der<br />
Typenleistung der entsprechenden Asynchronmaschine. Der Leistungsfaktor λ = 0,5 und der<br />
Wirkungsgrad η = 0,6 sind relativ niedrig.<br />
M<br />
M As<br />
M S<br />
0 1<br />
n/n 1<br />
Läuferblechschnitt<br />
eines Reluktanzmotors<br />
Momentenkennlinie<br />
eines Reluktanzmotors<br />
Hysteresemotoren<br />
Der Hysteresemotor ist eine Synchronmaschine mit Dauermagneterregung und günstigem<br />
asynchronen Anlaufeigenschaften. Der Ständer wird bei Kleinstmotoren meist im Spaltpolprinzip<br />
mit ausgeprägten Polen ausgeführt. Der Läufer besitzt keine Wicklung, sondern besteht aus einem<br />
Zylinder aus hartmagnetischem Werkstoff.<br />
Im asynchronen Betrieb entwickelt der Motor entsprechend Gl. (5.24) ein Drehmoment:<br />
= c ⋅ Φ ⋅ I ⋅ sinβ<br />
(7.15)<br />
M h 1<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 88
Zur Erzielung hoher Drehmomente ist also eine breite Hystereseschleife mit sinβ → 1 günstig.<br />
Φ<br />
i<br />
Φ<br />
i<br />
ωt<br />
β<br />
Magnetisierungskennlinie Φ = f{i}<br />
Diagramme von Feld Φ und Erregerstrom i<br />
Magnetisierung eines hartmagnetischen Werkstoffes<br />
Im synchronen Lauf entwickelt der Hysteresemotor sein Drehmoment wie eine gewöhnliche<br />
dauermagneterregte Synchronmaschine. Hysteresemotoren werden bei Leistungen unter 100 W<br />
für Kleinantriebe, die mit synchroner Drehzahl laufen müssen, eingesetzt.<br />
P 1<br />
P<br />
P L<br />
P FeH<br />
P v1<br />
P 2<br />
M<br />
M H ∆M<br />
0<br />
n/n 1 1<br />
Leistungsbilanz eines Hysteresemotors<br />
0<br />
n/n 1 1<br />
Momentenkennlinie eines Hysteresemotors<br />
Schrittmotoren<br />
Schrittmotoren sind eine Sonderbauform der Synchronmaschine mit ausgeprägten Ständerpolen,<br />
deren Wicklungen durch Stromimpulse zyklisch angesteuert werden.<br />
Dem sprungförmig umlaufendem Magnetfeld folgt der Läufer jeweils mit einem Schritt um den<br />
Winkel α.<br />
Einer Reihe von n Steuerimpulsen entspricht daher eine Drehung der Welle um den Drehwinkel<br />
ϕ = n · α, was eine Positionierung ohne Rückmeldung erlaubt.<br />
Zu einem Motor gehört immer ein dem Motor zugeordnetes Ansteuergerät.<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 89
1<br />
S<br />
+<br />
I<br />
2<br />
N<br />
N<br />
3<br />
Steuerung<br />
α<br />
S<br />
Schaltung eines dreisträngigen Reluktanzschrittmotors mit einem Schrittwinkel α = 15°<br />
Das Prinzip der Schrittmotortechnik kann am Beispiel eines dreisträngigen Motors mit Reluktanzläufer<br />
gezeigt werden. Durch die Stromimpulse werden die Wicklungsstränge 1 bis 3 nacheinander<br />
erregt und damit eine sprungförmige Winkeländerung der Ständerfeldlage erreicht. Der<br />
Läufer stellt sich jeweils so in dieses Ständerfeld ein, daß vier seiner Zähne mit den gerade<br />
erregten Ständerpolen deckungsgleich sind, was der Stellung kleinsten magnetischen Widerstandes<br />
(Reluktanz) entspricht. Im Beispiel ergibt jeder Impuls einen Winkelschritt von α = 15°.<br />
In der Praxis werden häufig im Vollschrittbetrieb mit einem Winkelschritt von α immer alle m<br />
Wicklungen mit unterschiedlicher Polarität bestromt (möglichst großer Wirkungsgrad). Im<br />
Halbschrittbetrieb mit einem Winkelschritt von α/2 werden dann abwechselnd m Wicklungen<br />
und m-1 Wicklungen bestromt.<br />
Schrittmotoren werden als permanenterregte Motoren, als Reluktanzmotoren mit weichmagnetischem<br />
Läuferzahnrad oder als Hybridmotoren mit m = 2 bis m = 5 Wicklungssträngen ausgeführt.<br />
G. Schenke, 9.2002 Grundlagen der Elektrotechnik III FB Technik, Abt. E+I 90