Implementierung Massiv Paralleler Systeme - Institut für Informatik ...
Implementierung Massiv Paralleler Systeme - Institut für Informatik ...
Implementierung Massiv Paralleler Systeme - Institut für Informatik ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Implementierung</strong><br />
<strong>Massiv</strong><br />
<strong>Paralleler</strong><br />
<strong>Systeme</strong><br />
Manfred Schimmler, Lars Wienbrandt, Sven Koschnicke<br />
<strong>Institut</strong> <strong>für</strong> <strong>Informatik</strong><br />
Lehrstuhl Technische <strong>Informatik</strong><br />
Christian-Albrechts-Universität zu Kiel<br />
1
Inhalt der Vorlesung<br />
1. Motivation und Einleitung<br />
2. Einführung in VHDL<br />
3. Automatenmodellierung mit VHDL<br />
4. Synthesefähiger Entwurf eines Mikroprozessors in VHDL<br />
5. FPGA-Technologie<br />
6. Taktung<br />
7. Parallelität<br />
8. Topologien und Komplexitätsmaße<br />
9. Parallele Architekturen 1 (Das Instruction Systolic Array)<br />
10.ISA-Prozessor-Architektur<br />
11.Parallele Hardware-Algorithmen 1 (Paralleles Merge)<br />
12.Parallele Hardware-Algorithmen 2 (Paralleles Sortieren)<br />
13.Parallele Hardware-Algorithmen 3 (Graphen-Algorithmen)<br />
14.Parallele Hardware-Algorithmen 4 (Brücken und FFT)<br />
15.Parallele Architekturen 2 (Vektorrechner)<br />
16.Parallele Architekturen 3 (Systolische Felder)<br />
17.Cloud Computing<br />
18. Der FPGA-basierte Parallelrechner Rivyera<br />
19. Rivyera API<br />
20. Bio-<strong>Informatik</strong> Algorithmen 1<br />
21. Bio-<strong>Informatik</strong> Algorithmen 2<br />
2
Was erwartet sie heute?<br />
1. Motivation<br />
Arten digitaler integrierter Schaltkreise<br />
Welche Zielarchitektur passt <strong>für</strong> welche Anwendung?<br />
Taxonomie der ICs<br />
Typen konfigurierbarer und rekonfigurierbarer Logik<br />
Ebenen beim Entwurf digitaler Schaltungen<br />
Entwurfsprozess<br />
Funktion der Hardwarebeschreibungssprache<br />
3
Arten digitaler integrierter Schaltungen<br />
• Diskrete Bauteile mit einer kleinen Anzahl einzelner Gattern zum<br />
Auflöten oder Aufstecken auf Platinen (z.B. in TTL, 7400)<br />
• Einfache fest konfigurierte Funktionsblöcke auf einem Chip ohne oder<br />
mit sehr begrenzter Möglichkeit der Programmierung (z.B. einfache<br />
Speicherchips, Zähler, Taschenrechner, Uhren)<br />
• Komplexe fest konfigurierte programmierbare Einheiten auf einem<br />
Chip (z.B. Mikroprozessoren, Mikrocontroller, Digitale Signal<br />
Prozessoren (DSPs), Massenspeicher mit integrierter Logik)<br />
• Kundenspezifisch konfigurierbare einfache Bausteine, z.B. PLA, FPLA<br />
(Programmable Logic Array, Field Programmable Logic Array)<br />
• Kundenspezifisch konfigurierbare komplexe Bausteine, z.B. FPGA<br />
(Field Programmable Gate Array)<br />
• Anwenderspezifische Integrierte Schaltkreise, ASICs<br />
4
Welche Zielarchitektur <strong>für</strong> welche Anforderung?<br />
Hauptkriterium: Datendominanz oder Kontrolldominanz?<br />
1. Beispiel: Die Steuerung der Einspritzung von Kraftstoff in einem<br />
Verbrennungsmotor<br />
2. Beispiel: Eine Grafikkarte<br />
3. Beispiel: Gesucht ist eine Hardwarelösung zum Angriff auf ein<br />
symmetrisches Verschlüsselungsverfahren, z.B. DES (Data<br />
Encryption Standard).<br />
4. Beispiel: Warum leisten Mikroprozessoren in datendominanten<br />
Anwendungen weniger als DSPs?<br />
5. Beispiel: Vektorprozessoren<br />
5
Welche Zielarchitektur <strong>für</strong> welche Anforderung?<br />
Hauptkriterium: Datendominanz oder Kontrolldominanz?<br />
1. Beispiel: Die Steuerung der Einspritzung von Kraftstoff in einem<br />
Verbrennungsmotor erfordert nicht viele (numerische) Berechnungen.<br />
Andererseits muss aber echtzeitig und zuverlässig reagiert werden. Es<br />
sind eine Reihe von Sondersituationen denkbar, die über spezielle<br />
Programme behandelt werden müssen. Die Art der Berechnung ist<br />
weitgehend ereignisgesteuert. Hier überwiegt die Kontrolle gegenüber<br />
der Datenverarbeitung, die Anwendung ist „kontrolldominant“.<br />
Für eine solche Anwendung verwendet man einen Mikrocontroller (was<br />
nichts anderes ist als ein auf Kosten optimierter Mikroprozessor).<br />
2. Beispiel: Eine Grafikkarte muss <strong>für</strong> Millionen von Pixeln dieselben<br />
Operationen durchführen, um einen Frame auf dem Bildschirm zu<br />
berechnen. Die Folge der Operationen ist fest vorgegeben, es gibt keine<br />
oder fast keine Sondersituationen und Interrupts. Der Datendurchsatz<br />
soll optimal sein, d.h. in einer festen Zeit sollen soviele (gleichartige)<br />
Berechnungen wie möglich gemacht werden. Eine solche Anwendung<br />
ist „datendominant“. Typische Zielarchitekturen hier sind DSPs oder<br />
Spezialprozessoren.<br />
6
Welche Zielarchitektur <strong>für</strong> welche Anforderung?<br />
3. Beispiel: Gesucht ist eine Hardwarelösung zum Angriff auf ein<br />
symmetrisches Verschlüsselungsverfahren, z.B. DES (Data Encryption<br />
Standard). Diese muss 2 56 mögliche Schlüssel einer Chiffre<br />
durchprobieren, um einen chiffrierten Text in den zugehörigen Klartext<br />
zurück zu übersetzen. Selbst schnellste Mikroprozessoren und sogar<br />
schnellste DSPs würden Jahrzehnte rechnen, um diese Aufgabe zu<br />
erfüllen. Dieses (ganz klar datendominierte) Anwendung erfordert eine<br />
individuelle Lösung, die speziell <strong>für</strong> diese Anwendung entwickelt wird.<br />
Man nennt eine solche Lösung „kundenspezifisch“, „application specific“<br />
oder „custom solution“. In diesem Falle könnte die Lösung eine<br />
Parallelarchitektur aus mehreren speziell <strong>für</strong> DES konfigurierten FPGAs<br />
sein, die mit deutlich höherem Durchsatz die möglichen Schlüssel<br />
durchprobieren können, als jeder Standardrechner. Oft werden mit<br />
solchen kundenspezifischen Lösungen Geschwindigkeiten erreicht, die<br />
sogar deutlich über denen von Superrechnern liegen.<br />
7
Welche Zielarchitektur <strong>für</strong> welche Anforderung?<br />
4. Beispiel: Warum leisten Mikroprozessoren in datendominanten<br />
Anwendungen weniger als DSPs?<br />
Mikroprozessoren sind „Alleskönner“, die <strong>für</strong> den Universaleinsatz<br />
optimiert sind. Sie haben aufwendige Pipelines, Branch-Prediction-<br />
Einheiten, Interrupt-Einheiten usw. die darauf ausgelegt sind,<br />
Unregelmäßigkeiten im Kontrollfluss effizient bearbeiten zu können.<br />
DSPs sind im Gegensatz dazu Rechenknechte. Sie haben (oft) viele<br />
Recheneinheiten, die parallel arbeiten können. Oft sind diese auch<br />
kombiniert, um spezielle Funktionen besonders schnell oder mit<br />
besonders hohem Durchsatz berechnen zu können. Ein Beispiel da<strong>für</strong><br />
ist eine Multiply-Add-Einheit, die viele Anwendungen in der linearen<br />
Algebra beschleunigen kann, z.B. Matrix-Multiplikation oder –Inversion.<br />
DSPs haben breite Datenleitungen (<strong>für</strong> Ein- und Ausgabe). Ein anderes<br />
Extrem in dieser Richtung sind die Netzwerkprozessoren, die darauf<br />
zugeschneidert sind, Anwendungen aus der modernen Digitalen<br />
Nachrichtenvermittlung zu beschleunigen.<br />
8
Welche Zielarchitektur <strong>für</strong> welche Anforderung?<br />
5. Beispiel: Vektorprozessoren verfügen über spezielle Einheiten, mit<br />
denen Vektoren verarbeitet werden können. Diese zeichnen sich durch<br />
eine besonders tiefe Pipeline aus. Ferner gibt es Register mit<br />
Vektorbreite und einen schnellen vektoriellen Speicherzugriff.<br />
Aufeinanderfolgende Operationen werden durch das sogenannte<br />
Chaining (Forewarding zwischen Operationen) beschleunigt.<br />
Vektorprozessoren waren in den 70-er und 80-er Jahren die ersten<br />
Superrechner. Heute verfügen viele Standardprozessoren über<br />
assoziierte Vektoreinheiten.<br />
9
Ein ASIC (Application Specific Integrated Circuit) ist ein<br />
anwendungsspezifischer integrierter Schaltkreis.<br />
Wenn es sich um einen Chip handelt, dessen sämtliche Transistoren<br />
und Leitungen frei vom Anwender entworfen, positioniert und<br />
dimensioniert werden, spricht man von einem Full-custom ASIC.<br />
Beim Full-Custom ASIC stehen dem Entwerfer alle Möglichkeiten zur<br />
Verfügung, die auch die Entwerfer von Mikroprozessoren (z.B. bei<br />
Intel oder Texas Instruments) benutzen (allerdings haben die kleineren<br />
Entwurfshäuser in der Regel nicht Zugang zu den jeweils besten<br />
Fabrikationsstätten, die in der Hand der großen Chiphersteller sind).<br />
Ein Beispiel <strong>für</strong> einen ASIC sehen wir auf der folgenden Folie. Die<br />
farbigen Striche und Rechtecke sind Leitungen in unterschiedlichen<br />
Materialien aus denen die Transistoren und Verbindungen aufgebaut<br />
werden.<br />
10
Full Custom Entwurf<br />
11
Full-custom<br />
ASIC-Entwurfsprozess<br />
Funktionale Beschreibung<br />
Floorplanning<br />
Design und Layout<br />
Design Rule Check<br />
Extraktion der Netzliste<br />
Simulation<br />
Electrical Rule Check<br />
Maskengenerierung<br />
Fertigung<br />
Test<br />
12
Wenn der Anwender sich beim Entwurf auf eine Menge von<br />
vorgegebenen Standardzellen beschränken kann und das Plazieren<br />
auf dem Chip (Placement) sowie das Verdrahten der Standardzellen<br />
untereinander (Routing) durch ein Programm durchgeführt wird,<br />
spricht man von einem Semi-Custom ASIC. Ein solcher Entwurf ist oft<br />
signifikant preisgünstiger als ein Full-Custom Entwurf, erreicht aber<br />
nicht die Integrationsdichte eines solchen.<br />
Die folgende Folie zeigt das Bild eines Semi-Custom Chips. Man<br />
erkennt deutlich die Zeilen, in denen die Standardzellen<br />
nebeneinander andgeordnet sind, und zwischen denen sich so<br />
genannte Routing-Kanäle <strong>für</strong> die Verbindung der Standardzellen<br />
untereinander befinden.<br />
Zur Semi-Custom-Klasse zählen auch Gate-Arrays. Dies sind Chips,<br />
bei denen in einem ersten Fabbrikationsschritt eine große Menge von<br />
Gattern auf dem Chip integriert wurde, aber zunächst ohne Routing. In<br />
einem zweiten, vom Kunden gesteuerten Fertigungsprozess, werden<br />
die Verbindungsleitungen entsprechend der kundenspezifischen<br />
Schaltung hinzugefügt. Diese Technologie hat aber in den letzten<br />
Jahren an Bedeutung verloren.<br />
13
Semi-Custom Entwurf<br />
14
Wenn die Strukturen auf dem Silizium weitgehend<br />
anwendungsunspezifisch vorgegeben sind und der Anwender seine<br />
Schaltung durch nachträgliche Manipulation eines solchen Chips<br />
implementiert, spricht man von Field Programmable Logic. Sie wird<br />
also quasi erst im Anwendungsfeld programmiert.<br />
Diese gibt es in zwei grundsätzlich verschiedenen Ausprägungen:<br />
• Einmalig programmierbar<br />
• Reprogrammierbar<br />
Einmalig programmierbare Schaltungen sind in der Regel schneller<br />
und flächeneffizienter aufgebaut. Diese Vorteile stehen dem Nachteil<br />
gegenüber, dass der Entwurfsprozess wesentlich komfortabler mit<br />
reprogrammierbarer Logik gestaltet werden kann. Beispiele da<strong>für</strong><br />
werden wir später kennen lernen.<br />
15
Taxonomie der ICs<br />
Standard ICs<br />
Standard ICs<br />
Logik Logik<br />
Familien<br />
Speicher<br />
Mikroprozessoren<br />
Digitale integrierte Schaltkreise<br />
Digitale integrierte Schaltkreise<br />
Field Fieldpro programmable<br />
Speicher<br />
PROM PROM<br />
EPROM<br />
EEPROM<br />
Logik<br />
Logik<br />
PLDs<br />
PLDs<br />
ASICs<br />
ASICs<br />
Full Full<br />
Custom<br />
Gate- Gate-<br />
Array Array<br />
FPGAs<br />
FPGAs<br />
Semi Semi<br />
Custom<br />
Standard-<br />
Cell Cell<br />
16
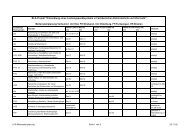
Full-Custom<br />
IC<br />
Standard-<br />
Cell IC<br />
Gate Array FPGA<br />
Anzahl Gatter 500.000.000 10.000.000 1.000.000 1.000.000<br />
Entw.-Zeit 1-2 Jahre 2-4 Monate 3-6 Wochen 1-30 Tage<br />
Entw.-Kosten<br />
Witschaftl.<br />
Stückzahl<br />
hoch<br />
ab ca. 200.000<br />
mittel<br />
ca. 80.000<br />
mittel<br />
ca. 50.000<br />
niedrig<br />
ca. 10.000<br />
ab 100.000 ab 5000 ab 1000 ab 1<br />
PLD<br />
2.000<br />
1 Tag<br />
niedrig<br />
ca. 300<br />
ab 1<br />
17
Rechenleistung<br />
ASIC<br />
Rechenleistung vs. Flexibilität<br />
Spezialrechner<br />
ASIC: application specific integrated circuit<br />
FPGA: field programmable gate array<br />
FPGA<br />
Mikroprozessoren<br />
Größe des<br />
Anwendungsspektrums<br />
18
Integrationsdichte<br />
Höchstintegration vs. schneller Entwurf<br />
ASIC<br />
angepasster<br />
Mikroprozessor<br />
PCB<br />
ASIC: Application Specific Integrated Circuit<br />
FPGA: Field Programmable Gate Array<br />
PLA: Programmable Logic Array<br />
PCB: Printed Circuit Board<br />
PLA<br />
FPGA<br />
Designgeschwindigkeit<br />
19
Typen konfigurierbarer und rekonfigurierbarer Logik<br />
Üblich sind zwei Arten der <strong>Implementierung</strong>:<br />
Schaltnetzrealisierung durch Speicher<br />
Schaltnetzrealisierung mit AND- und OR-Plane<br />
Wir sehen Beispiele <strong>für</strong> die beiden Techniken auf den folgenden<br />
Folien.<br />
Die Realisierung kann unveränderlich oder reprogrammierbar sein. Bei<br />
unveränderlicher Realisierung werden im Moment des Erzeugens der<br />
individuellen Schaltung bestimmte Verbindungen durchtrennt (man<br />
bezeichnet diesen Vorgang häufig als „Brennen“). Die Stellen, an<br />
denen Verbindungen so durchtrennt werden können, werden als<br />
Fuses (Sicherungen) bezeichnet. Durch das Brennen wird die Ein-<br />
Ausgabe-Funktion der Schaltung festgelegt.<br />
Bei reprogrammierbarer Realisierung werden Speicher beschrieben,<br />
die danach den Betrieb der Schaltung steuern. Im Allgemeinen ist der<br />
Speicher selbst schon die Realisierung der Schaltung, d.h. die<br />
Eingaben sind die Adressen und die Ausgaben sind die gespeicherten<br />
Werte.<br />
20
Beispiel: Realisierung eines Schaltnetzes als ROM (Read Only<br />
Memory)<br />
Ein ROM wird zur Generierung des Schaltnetzes mit der Wertetabelle<br />
der zu entwerfenden Funktion beschrieben.<br />
Im Betrieb wird dieses ROM danach benutzt, indem die Eingaben in<br />
das Schaltnetz an die Addresseingänge des ROM gelegt werden, und<br />
die Ausgaben des Schaltnetzes durch die Ausgaben des ROM<br />
geliefert werden.<br />
Eingaben<br />
Ausgaben<br />
21
Beispiel: Ein Volladdierer, realisiert mit einem 8x2-Bit ROM<br />
Wertetabelle ROM<br />
x 2 x 1 x 0 s c<br />
0 0 0 0 0<br />
0 0 1 1 0<br />
0 1 0 1 0<br />
0 1 1 0 1<br />
1 0 0 1 0<br />
1 0 1 0 1<br />
1 1 0 0 1<br />
1 1 1 1 1<br />
Eingaben<br />
x 2 ,x 1 ,x 0<br />
000<br />
001<br />
010<br />
011<br />
100<br />
101<br />
110<br />
111<br />
0 0<br />
1 0<br />
1<br />
0<br />
0 1<br />
1 0<br />
0 1<br />
0 1<br />
1 1<br />
c<br />
s<br />
22
Beispiel: Ein 8x2-Bit ROM (Fuse-Technik, d.h. nicht<br />
reprogrammierbar), bisher noch nicht „gebrannt“<br />
Eingaben<br />
x 2 ,x 1 ,x 0<br />
000<br />
001<br />
010<br />
011<br />
100<br />
101<br />
110<br />
111<br />
1 0 1<br />
1<br />
1<br />
23
Beispiel: Ein Volladdierer, realisiert mit einem 8x2-Bit ROM. Das<br />
„Brennen“ erfolgt durch herausnehmen von Source-Verbindungen der<br />
MOSFETs (Fuses).<br />
1 0 1<br />
Eingaben<br />
x 2 ,x 1 ,x 0<br />
000<br />
001<br />
010<br />
011<br />
100<br />
101<br />
110<br />
111<br />
1<br />
1<br />
s<br />
c<br />
24
Die letzte Folie hat gezeigt: Ein Bit der Wertetabelle einer booleschen<br />
Funktion benötigt in einer Fuse-Technik einen Transistor (der durch<br />
den Prozess des Brennens aktiviert oder deaktiviert sein kann).<br />
Natürlich können wir auch dieselbe Wertetabelle in einem<br />
wiederbeschreibbaren Speicher, z.B. einem SRAM unterbringen. Der<br />
Unterschied ist der Schaltungsaufwand. Für ein Bit in einer SRAM<br />
Zelle benötigen wir 6 Transistoren. D.h. wir haben ungefähr einen um<br />
einen Faktor 6 höheren Flächenaufwand. Entsprechend sind logisch<br />
gleichgroße Speicher in Antifuse-ROM-Technologie kleiner und<br />
schneller.<br />
Dieses Merkmal zieht sich durch alle Schaltkreisfamilien, in denen wir<br />
reprogrammierbare oder einmalig brennbare Bausteine vorfinden. Wir<br />
bezahlen die Reprogrammierbarkeit mit einer geringeren Integrations-<br />
Dichte und einer geringeren Schaltgeschwindigkeit.<br />
25
Der Vorteil von Reprogrammierbarkeit soll aber hier auch nicht<br />
verschwiegen werden: Im Prozess des Entwurfs einer Schaltung ist<br />
die Bearbeitung von Designfehlern und der Test erheblich<br />
kostengünstiger. Dies macht die reprogrammierbaren Bausteine<br />
besonders <strong>für</strong> den Einsatz in Forschung und Entwicklung besonders<br />
attraktiv.<br />
Tatsächlich machen die beiden größten Firmen im Bereich der FPGAs<br />
(Xilinx und Altera) gegenwärtig mehr als 90% ihres Geschäfts mit<br />
reprogrammierbaren Bausteinen.<br />
26
Realisierung eines Schaltnetzes als PLA mit AND- und OR-Plane<br />
AND-Plane<br />
&<br />
&<br />
&<br />
Minterme<br />
OR-plane<br />
≥1 ≥1 ≥1<br />
Eingaben Ausgaben<br />
27
Beispiel: Volladdierer als PLA mit AND- und OR-Plane<br />
x 2<br />
AND-Plane<br />
1 1 1<br />
x 1<br />
x 0<br />
Minterme<br />
OR-plane<br />
s c<br />
28
0<br />
1<br />
0<br />
Beispiel: Funktionen y1 = x0x1x2 + x0x1x2 und y0 = x0x1x2 realisiert als PLA mit AND- und OR-Plane<br />
0<br />
x 2<br />
1 1 1<br />
x 1<br />
x 0<br />
Eingänge Ausgänge<br />
y 1<br />
1<br />
0<br />
y 0<br />
29
FPGA (Field Programmable Gate Arrays)<br />
FPGAs sind heute die leistungsfähigsten anwenderprogrammierbaren<br />
Bausteine. Es gibt weltweit etwa 10 Hersteller, von denen Xilinx, Altera,<br />
Quicklogic, Actel die wichtigsten sind.<br />
Das Konzept des FPGAs ist die Bereitstellung einer Vielzahl von<br />
identischen konfigurierbaren Zellen, so genannten Configurable Logical<br />
Blocks (CLBs). Diese können Boolesche Schaltnetze mit zwischen 4<br />
und 16 Eingängen realisieren und haben in der Regel ein bis vier<br />
Flipflops zur Speicherung der Ergebnisse zur Verfügung.<br />
XilinX: Configurable Logic Block (CLB)<br />
Altera: Logic Element (LE)<br />
Actel: Logic Tile (LT)<br />
QuickLogic: Logic Cell (LC)<br />
In modernen FPGAs wird häufig als zusätzliche Funktionalität ein oder<br />
mehrere Blöcke RAM vorgehalten. Auch das integrieren von einfachen<br />
Prozessorkernen wird unterstützt.<br />
FPGAs gibt es sowohl als einmalig brennbare Bauteile als auch als<br />
reprogrammierbare Einheiten.<br />
Auf der nächsten Folie ist der Floorplan eines typischen FPGAs<br />
abgebildet.<br />
30
Beispiel <strong>für</strong> einen CLB eines XilinX XC3000 FPGAs<br />
31
Beispiel: Floorplan eines FPGA<br />
CLB<br />
RAM<br />
Verdrahtungskanäle<br />
Pad-Cellen <strong>für</strong> die<br />
Verbindung nach außen<br />
32
Ebenen beim Entwurf digitaler Schaltungen<br />
Die Ebenen, die bei dem Entwurf einer Schaltung durchlaufen werden,<br />
definieren die Anforderungen an ein Softwaresystem, das den<br />
Entwurfprozess unterstützen soll. Wir wollen diese Ebenen zunächst<br />
kennen lernen, um danach beurteilen zu können, an welcher Stelle des<br />
Entwurfs wir uns Unterstützung durch Software erhoffen können.<br />
Die oberste Ebene ist die Verhaltensebene. Auf dieser wird die<br />
Schaltung durch Leistungsanforderungen an ihr Ein-Ausgabe-Verhalten<br />
beschrieben. Die Verhaltens-Beschreibung macht keine Festlegung<br />
über die Strukturierung, <strong>Implementierung</strong>, Technologie usw.<br />
Darunter liegt die Architektur-Ebene. Hier wird festgelegt, aus welchen<br />
Komponenten die Schaltung aufgebaut werden soll, mit welchen<br />
Hardware-Bausteinen also die Funktion erfüllt werden kann. Beispiele<br />
<strong>für</strong> solche Bausteine können <strong>für</strong> ein komplexes System wie z.B. das<br />
Motherboard eines Computers die beteiligten Prozessoren,<br />
Speicherchips, Controller, usw. Zwischen diesen Bauteilen bestehen<br />
Schnittstellen, die ebenso wie die Bauteile selbst wiederum funktional<br />
beschrieben werden müssen. Ein Beispiel <strong>für</strong> ein weniger komplexes<br />
33
&<br />
≥1<br />
Abstraktionsebenen beim Entwurf digitaler <strong>Systeme</strong><br />
J Q<br />
K<br />
Verhaltens-Ebene<br />
Architektur-Ebene<br />
RT-Ebene<br />
Logik-Ebene<br />
Transistor-Ebene<br />
Physikalische Ebene<br />
Speicher CPU I/O<br />
A B<br />
Mux<br />
Control<br />
ALU<br />
34
System ist ein zu entwerfender Mikrocontroller. Hier könnten die<br />
Bausteine eine ALU, ein Multiplizierer, ein On-Chip-Cache, ein<br />
Registersatz, eine Befehls-Dekodierungs-Einheit usw. sein. Wiederum<br />
sind diese Komponenten und ihre Schnittstellen funktional zu<br />
beschreiben.<br />
Die Ebene darunter ist die Register-Transfer-Ebene (RT-Ebene).<br />
Bausteine sind hier Register, Multiplexer, Addierer, Schaltnetze, Shifter,<br />
usw. Die Schnittstellen zwischen diesen Einheiten sind Datenpfade, auf<br />
denen Registerinhalte ausgetauscht werden. Das Verhalten der<br />
Einheiten ist durch die Operationen bestimmt, <strong>für</strong> deren Ausführung sie<br />
erforderlich sind.<br />
Unter der Register-Transfer-Ebene liegt die Logik-Ebene. Hier sind die<br />
Einheiten Gatter, Flipflops, Transmissionsgatter. Ihr Verhalten kann<br />
durch boolsche Ausdrücke beschrieben werden.<br />
Unter der Logik-Ebene kommt die Transistor-Ebene. Diese ist aus<br />
Transistoren und passiven Elementen wie Leitungen aufgebaut. Die<br />
physikalischen Ebenen unterhalb der Transistor-Ebene sollen uns in<br />
dieser Vorlesung nicht interessieren.<br />
35
Verhaltens-<br />
Ebene<br />
Architektur<br />
Ebene<br />
Register Transfer<br />
Ebene<br />
Verhaltensbeschreibung<br />
Struktur<br />
Leistungsanforderungen keine<br />
Ein-Ausgabeverhalten<br />
der Architektur<br />
Datenfluss, State<br />
Machines<br />
Blockschaltbild<br />
RT-Diagramme<br />
Logik-Ebene Boolesche Gleichungen Netzliste<br />
Transistor-Ebene Differenzialgleichungen el. Schaltbild<br />
Elemente<br />
Prozessoren, Speicher<br />
Busse, Controller<br />
Register, Multiplexer,<br />
Dekodierer<br />
Flipflops, Gatter<br />
Transistoren, Dioden<br />
Kondensatoren<br />
36
Daten<br />
Speicher<br />
Befehls-Dekodierung<br />
ALU<br />
FPU<br />
Multiplizierer<br />
Daten, Befehle, Selektoren<br />
OP-<br />
Muxe<br />
Clk<br />
Daten<br />
Daten, Befehle, Selektoren<br />
37
Spaltenselektor<br />
In<br />
Zeilenselektor<br />
In<br />
Datalink<br />
Westen<br />
Vom CW<br />
Spaltenselektor<br />
Out<br />
2<br />
12<br />
2<br />
Instruction<br />
Out<br />
Instruction<br />
In<br />
rs cs<br />
Writeport<br />
ALU<br />
6<br />
Datalink<br />
Norden<br />
Flag-Manager<br />
Floating Point Einheit (FPU)<br />
Shifter<br />
Datalink<br />
Süden<br />
RAM-Registerfile<br />
Befehlsdekoder<br />
Bedingt-Logische<br />
Einheit<br />
Multipizierer<br />
Vom CN<br />
R0<br />
R1<br />
R31<br />
Op0-Indexreg. Op1-Indexreg. Res-Indexreg.<br />
Kommunikationsregister<br />
Vom CS<br />
Op0-MUX<br />
Read-<br />
Port<br />
Op1-MUX<br />
Clock-<br />
Verteiler<br />
Zeilenselektor<br />
Out<br />
Datalink<br />
Osten<br />
Vom CE<br />
Clock<br />
38
ybar<br />
x<br />
r_mult<br />
s_mult<br />
1<br />
≥1<br />
VA<br />
≥1<br />
VA<br />
39
Beim Entwurf eines digitalen Systems durchläuft man die hier<br />
angesprochenen Ebenen der Abstraktion.<br />
In bestimmten Entwurfsprozessen ist die Detailkenntnis aller Ebenen<br />
nicht erforderlich. Z.B. braucht ein Standard-Cell-Designer nur sehr<br />
wenig über die Transistor-Ebene zu wissen, da sein Entwurfziel auf der<br />
Logik-Ebene bereits erreicht ist. Die Umsetzung seiner bis dahin<br />
entworfenen Schaltung in ein physikalisches Layout ist Aufgabe des<br />
Semi-Custom-Entwurfssystems (also eines Programms).<br />
Wir favorisieren hier einen Top-Down-Entwurfsprozess. Wir wollen bei<br />
unseren Entwürfen bei der Verhaltens-Ebene beginnen, und nach und<br />
nach auf dem Weg hinunter zur Logik-Ebene das Verhalten der<br />
Schaltung durch eine Strukturierung ihrer Bauteile sicherstellen. Man<br />
implementiert also auf diesem Weg „Verhalten“ durch „Struktur“.<br />
Begleitend soll der Entwurf in jeder Phase überprüfbar korrekt sein. Dies<br />
geschieht durch Simulation.<br />
43
Simulation erfordert die Modellierung der<br />
Schaltung auf der jeweiligen<br />
Entwurfsebene und die Kontrolle der<br />
Funktion dieses Modells bei der Eingabe<br />
von aussagefähigen Simulationsstimuli<br />
(Eingabewerten).<br />
44
Am wünschenswertesten ist eine Simulationsumgebung, die unabhängig<br />
vom Stadium des Entwurfs (dem Anteil von Verhaltensmodell und<br />
Strukturmodell) ist. Man möchte also einen Satz von Simulationsstimuli<br />
benutzen, mit dem dieselbe Funktionalität in allen Ebenen des Entwurfs<br />
verifiziert werden kann.<br />
45
Strukturelle vs. Verhaltensbeschreibung von Schaltungen<br />
Man kann Schaltungen mit Ihrer Struktur oder mit ihrem Verhalten<br />
beschreiben. Bei der Beschreibung mittels der Struktur beziehen wir uns<br />
auf den Aufbau der Schaltung aus einzelnen Komponenten, die<br />
wiederum ihrerseits beschrieben werden können. Bei einer<br />
Verhaltensbeschreibung wird angegeben, welche datenverarbeitenden<br />
Prozesse die Schaltung realisiert. Wir beschreiben also ihr<br />
Verarbeitungsverhalten der Eingangsdaten und geben auf diese Weise<br />
algorithmisch an, wie die Ausgangsdaten aus den Eingangsdaten<br />
berechnet werden.<br />
Man kann Strukturbeschreibung und Verhaltensbeschreibung mischen.<br />
Z.B. könnten die Komponenten einer Strukturbeschreibung eines<br />
Bausteins in ihrem Verhalten beschrieben werden. Im Hardwareentwurf<br />
beginnen wir in der Regel mit Verhaltensbeschreibungen. Diese werden<br />
dann nach und nach durch Strukturbeschreibungen ersetzt.<br />
Der Prozess des Hardwareentwurfs kann also im weitesten Sinne als<br />
kontinuierliche Ersetzung von Verhalten durch Struktur verstanden<br />
werden.<br />
46
Definition<br />
Unter einer strukturellen Beschreibung eines Bausteins versteht man<br />
die Beschreibung einer Skizze, die angibt, welche Komponenten (und<br />
wie viele Instanzen der Komponenten) zur Realisierung des Bausteins<br />
genutzt werden und wie diese Komponenten mit den Ein- und<br />
Ausgängen des Bausteins verdrahtet sind.<br />
47
Definition<br />
Unter einer Verhaltensbeschreibung eines Bausteins versteht die<br />
funktionale Modellierung seines Ein-/Ausgabeverhaltens.<br />
48
Beispiel: Verhaltensbeschreibung eines Volladdierers<br />
architecture Behavioral of VA is<br />
Begin<br />
s
Beispiel: Strukturbeschreibung eines Volladdierers<br />
architecture Structural of VA is<br />
BEGIN<br />
HA1: HA PORT MAP(<br />
A => A,<br />
B => B,<br />
S => S1HA,<br />
Cout => C1HA<br />
);<br />
HA2: HA PORT MAP(<br />
A => S1HA,<br />
B => Cin,<br />
S => S2HA,<br />
Cout => C2HA<br />
);<br />
Cout
Beispiel: Der FPGA-Entwurfsablauf ab der RT-Ebene<br />
Eingabe<br />
VHDL Verilog<br />
Netzliste<br />
Synthese<br />
Implementation<br />
Bitfile<br />
Chip<br />
Programmierung<br />
Verhaltenssimulation<br />
Funktionale Simulation<br />
Statische Timing Analyse<br />
Timing Simulation<br />
In-Circuit Verification<br />
Verifikation<br />
51
Synthese<br />
VHDL<br />
VHDL<br />
Syntax Check<br />
grafische RTL<br />
Darstellung<br />
Technology Mapping<br />
Netzliste<br />
Netzliste<br />
Netzliste<br />
Überprüfung des VHDL Codes<br />
auf Syntax und Semantik<br />
Abbildung der Logik von RTL<br />
Ebene auf Gatter-Ebene<br />
52
Implementation<br />
Netzliste<br />
Netzliste<br />
Netzliste<br />
Translate<br />
Map<br />
Place & Route (PAR)<br />
Bitfile<br />
Constraints<br />
Generiert aus mehreren Netzlisten und<br />
Constraints eine einzige Netzliste<br />
Logischer „Design Rule Check“ und<br />
Abbildung der Logik auf<br />
Komponententypen der Zielarchitektur<br />
Abbildung der Komponenten auf<br />
definierte physikalische Einheiten der<br />
Zielarchitektur und erstellen<br />
der Verbindungen<br />
53
Funktion der Hardwarebeschreibungssprache<br />
Die Hardware Description Language (HDL) hat die Aufgabe, den<br />
Entstehungsprozess eines Hardwareentwurfs durch die verschiedenen<br />
Ebenen zu unterstützen. Die Sprachen Verilog HDL und VHLD sind<br />
weltweit etwa gleichstark vertreten. In Europa gibt es ein Übergewicht<br />
von VHDL, in Amerika von Verilog HDL.<br />
HDLs unterstützen den Top-Down-Entwurf. In der HDL kann eine<br />
Schaltung auf der Verhaltensebene modelliert und simuliert werden.<br />
Sodann kann sie durch schrittweise Ersetzung von Verhalten durch<br />
Struktur in eine synthetisierbare Form gebracht werden. Jeder dieser<br />
Schritte kann wiederum durch Simulation verifiziert werden.<br />
Die finale strukturierte HDL-Beschreibung ist schließlich die Eingabe in<br />
das zur Verfügung stehende Synthese-Tool.<br />
Gegenstand dieser Vorlesung ist das Erlernen von VHDL in der<br />
Anwendung, einfache Schaltungen auf eine FPGA-Zielarchitektur zu<br />
bringen.<br />
54
Funktion der Hardwarebeschreibungssprache<br />
• Macht die Komplexität heutiger <strong>Systeme</strong> beherrschbar<br />
• Manueller Entwurf fehleranfällig<br />
• Simulation des Gesamtsystems zu rechenaufwendig<br />
• Entwurfsaufgaben können auf meherere Personen verteilt werden<br />
• Wiederverwendung von bestehenden Entwürfen wird unterstützt<br />
• Kann zum Datenaustausch dienen<br />
• Auftraggeber und –nehmer<br />
• Entwickler im selben Entwurfsteam<br />
• Zwischen verschiedenen Ebenen des Entwurfs<br />
• Zwischen unterschiedlichen Tools verschiedener Hersteller<br />
• Kann der Dokumentation dienen<br />
• Lebensdauer des Systems höher als Zugriffszeit auf Entwickler<br />
• Erleichtert Wiederverwendung bei Modifikationen im Entwurf<br />
• Erleichtert Wiederverwendung bei Technologiewechsel<br />
• Garantiert Konsistenz in der Dolumentation<br />
55