Erweiterung der harmonischen Balance für die numerische ...
Erweiterung der harmonischen Balance für die numerische ... Erweiterung der harmonischen Balance für die numerische ...
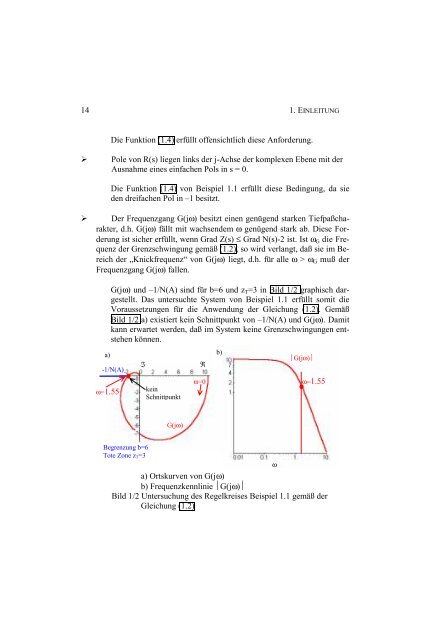
14 1. EINLEITUNG Die Funktion (1.4) erfüllt offensichtlich diese Anforderung. Pole von R(s) liegen links der j-Achse der komplexen Ebene mit der Ausnahme eines einfachen Pols in s = 0. Die Funktion (1.4) von Beispiel 1.1 erfüllt diese Bedingung, da sie den dreifachen Pol in –1 besitzt. Der Frequenzgang G(jω) besitzt einen genügend starken Tiefpaßcharakter, d.h. G(jω) fällt mit wachsendem ω genügend stark ab. Diese Forderung ist sicher erfüllt, wenn Grad Z(s) ≤ Grad N(s)-2 ist. Ist ω G die Frequenz der Grenzschwingung gemäß (1.2), so wird verlangt, daß sie im Bereich der „Knickfrequenz“ von G(jω) liegt, d.h. für alle ω > ω G muß der Frequenzgang G(jω) fallen. G(jω) und –1/N(A) sind für b=6 und z T =3 in Bild 1/2 graphisch dargestellt. Das untersuchte System von Beispiel 1.1 erfüllt somit die Voraussetzungen für die Anwendung der Gleichung (1.2). Gemäß Bild 1/2 a) existiert kein Schnittpunkt von –1/N(A) und G(jω). Damit kann erwartet werden, daß im System keine Grenzschwingungen entstehen können. a) -1/N(A) I R b) ⏐G(jω)⏐ ω=1.55 kein Schnittpunkt ω=0 ω=1.55 G(jω) Begrenzung b=6 Tote Zone z T=3 ω a) Ortskurven von G(jω) b) Frequenzkennlinie ⏐G(jω)⏐ Bild 1/2 Untersuchung des Regelkreises Beispiel 1.1 gemäß der Gleichung (1.2)
1.1 MOTIVATION UND ZIELE DER ARBEIT 15 Die in Bild 1/3 dargestellten Simulationsergebnisse widerlegen diese Aussage. 40 30 20 10 w(t) y(t) 0 -10 0 50 100 150 200 250 300 Bild 1/3 Simulationsergebnisse des Regelkreises von Beispiel 1.1 für b=6 und z T =3 t/Sek. Durch die Änderung der Begrenzung von b=6 auf b=5,9 wird die –1/N(A)- Kennlinie nach links verschoben. Der Abstand zwischen G(jω) und der Funktion –1/N(A) wird größer und die Untersuchungsergebnisse von Bild 1/2 stellen sich ein. Die Simulationsverläufe für b=5,9 sind in Bild 1/4 dargestellt. 40 30 20 10 w(t) y(t) 0 -10 0 50 100 150 200 250 300 350 t/Sek. Bild 1/4 Simulationsergebnisse des Regelkreises von Beispiel 1.1 für b=5,9 und z T =3 Die folgenden Beispiele verdeutlichen die angesprochenen Probleme.
- Seite 1: UNIVERSITÄT DER BUNDESWEHR MÜNCHE
- Seite 5: Vorwort Die vorliegende Arbeit ents
- Seite 8 und 9: 8 INHALTSVERZEICHNIS 6. STABILITÄT
- Seite 10 und 11: 10 1. EINLEITUNG Weiterhin zeigt di
- Seite 12 und 13: 12 1. EINLEITUNG Die grundlegende F
- Seite 16 und 17: 16 1. EINLEITUNG Beispiel 1.2 (vgl.
- Seite 18 und 19: 18 1. EINLEITUNG Demnach soll das S
- Seite 20 und 21: 20 1. EINLEITUNG Aus Bild 1/9 geht
- Seite 22 und 23: 1.2 AUFBAU DER ARBEIT 22 1.2 Aufbau
- Seite 25 und 26: 25 2. Nichtlineare dynamische Syste
- Seite 27 und 28: 2.1 GEEIGNETE STRUKTUR NICHTLINEARE
- Seite 29 und 30: 2.1 GEEIGNETE STRUKTUR NICHTLINEARE
- Seite 31 und 32: 2.2 AUFSTELLUNG DER SYSTEMGLEICHUNG
- Seite 33 und 34: 33 3. Das Systemverhalten und die E
- Seite 35 und 36: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 37 und 38: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 39 und 40: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 41 und 42: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 43 und 44: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 45 und 46: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 47 und 48: 3.1 LINEARE BETRACHTUNG NICHTLINEAR
- Seite 49 und 50: 3.2 HARMONISCHE BETRACHTUNG TRANSIE
- Seite 51 und 52: 3.2 HARMONISCHE BETRACHTUNG TRANSIE
- Seite 53: 3.2 HARMONISCHE BETRACHTUNG TRANSIE
- Seite 56 und 57: 56 4.2 BERECHNUNG DER BESCHREIBUNGS
- Seite 58 und 59: 58 4. BESCHREIBUNGSFUNKTION Die Gle
- Seite 60 und 61: 60 4. BESCHREIBUNGSFUNKTION Nun mu
- Seite 62 und 63: 62 4. BESCHREIBUNGSFUNKTION 4.2 Ber
14 1. EINLEITUNG<br />
Die Funktion (1.4) erfüllt offensichtlich <strong>die</strong>se Anfor<strong>der</strong>ung.<br />
<br />
Pole von R(s) liegen links <strong>der</strong> j-Achse <strong>der</strong> komplexen Ebene mit <strong>der</strong><br />
Ausnahme eines einfachen Pols in s = 0.<br />
Die Funktion (1.4) von Beispiel 1.1 erfüllt <strong>die</strong>se Bedingung, da sie<br />
den dreifachen Pol in –1 besitzt.<br />
<br />
Der Frequenzgang G(jω) besitzt einen genügend starken Tiefpaßcharakter,<br />
d.h. G(jω) fällt mit wachsendem ω genügend stark ab. Diese For<strong>der</strong>ung<br />
ist sicher erfüllt, wenn Grad Z(s) ≤ Grad N(s)-2 ist. Ist ω G <strong>die</strong> Frequenz<br />
<strong>der</strong> Grenzschwingung gemäß (1.2), so wird verlangt, daß sie im Bereich<br />
<strong>der</strong> „Knickfrequenz“ von G(jω) liegt, d.h. für alle ω > ω G muß <strong>der</strong><br />
Frequenzgang G(jω) fallen.<br />
G(jω) und –1/N(A) sind für b=6 und z T =3 in Bild 1/2 graphisch dargestellt.<br />
Das untersuchte System von Beispiel 1.1 erfüllt somit <strong>die</strong><br />
Voraussetzungen für <strong>die</strong> Anwendung <strong>der</strong> Gleichung (1.2). Gemäß<br />
Bild 1/2 a) existiert kein Schnittpunkt von –1/N(A) und G(jω). Damit<br />
kann erwartet werden, daß im System keine Grenzschwingungen entstehen<br />
können.<br />
a)<br />
-1/N(A)<br />
I<br />
R<br />
b)<br />
⏐G(jω)⏐<br />
ω=1.55<br />
kein<br />
Schnittpunkt<br />
ω=0<br />
ω=1.55<br />
G(jω)<br />
Begrenzung b=6<br />
Tote Zone z T=3<br />
ω<br />
a) Ortskurven von G(jω)<br />
b) Frequenzkennlinie ⏐G(jω)⏐<br />
Bild 1/2 Untersuchung des Regelkreises Beispiel 1.1 gemäß <strong>der</strong><br />
Gleichung (1.2)


