Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck
Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck
Leistungscharakteristika von ATM-Netzen für ... - Torsten E. Neck

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2 0Informationstechnische Grundkomponenten eines<br />
Telepräsenzsystemes<br />
Bereits an früherer Stelle wurde festgehalten, daß in einem Telepräsenzsystem Konzepte aus<br />
der Prozeßautomatisierung und der Telematik vereint werden. Sie sollen vor der späteren<br />
Synthese deswegen separat vorgestellt werden.<br />
2.1 Prozeßsteuerung und Prozeßregelung<br />
Will man ein technisches System automatisieren, so müssen die den Systemzustand<br />
kennzeichnenden Größen erfaßt und interpretiert werden. Aus der Kenntnis über einen<br />
momentanen Systemzustand und über ein gesetzmäßig dynamisches Verhalten des Systems<br />
heraus können dann durch geeignete Beeinflussungen der Systemgrößen gewünschte<br />
Folgezustände herbeigeführt werden /ReLe94/.<br />
Folgende Begriffe sind dabei <strong>von</strong> Bedeutung:<br />
2.1.1 Strecke<br />
Die Strecke oder Steuerstrecke/Regelstrecke ist derjenige Teil des Systems, in dem technische<br />
oder physikalische Größen gemäß einer Zielfunktion beeinflußt werden. Im Fall etwa der<br />
dezentralen Steuerung einer Endoskop-Positionierung stellt jede einzeln ansteuerbare Achse<br />
der Positioniermechanik eine einzelne Strecke dar, im Fall einer zentralen Steuerung wird<br />
das kinematische Gesamsystem der Achsen als eine einzige Strecke betrachtet.<br />
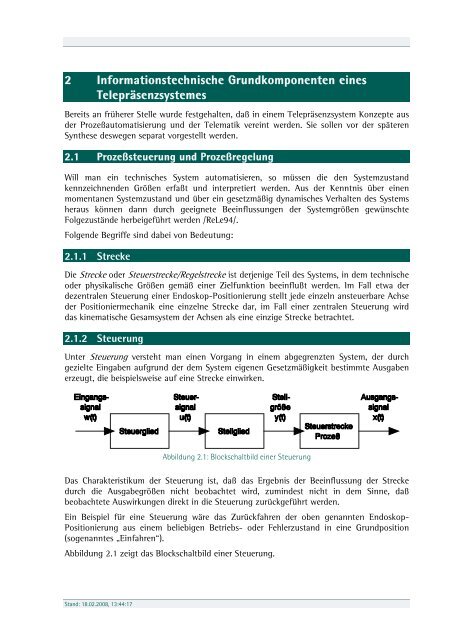
2.1.2 Steuerung<br />
Unter Steuerung versteht man einen Vorgang in einem abgegrenzten System, der durch<br />
gezielte Eingaben aufgrund der dem System eigenen Gesetzmäßigkeit bestimmte Ausgaben<br />
erzeugt, die beispielsweise auf eine Strecke einwirken.<br />
Abbildung 2.1: Blockschaltbild einer Steuerung<br />
Das Charakteristikum der Steuerung ist, daß das Ergebnis der Beeinflussung der Strecke<br />
durch die Ausgabegrößen nicht beobachtet wird, zumindest nicht in dem Sinne, daß<br />
beobachtete Auswirkungen direkt in die Steuerung zurückgeführt werden.<br />
Ein Beispiel <strong>für</strong> eine Steuerung wäre das Zurückfahren der oben genannten Endoskop-<br />
Positionierung aus einem beliebigen Betriebs- oder Fehlerzustand in eine Grundposition<br />
(sogenanntes „Einfahren“).<br />
2Abbildung 2.1 zeigt das Blockschaltbild einer Steuerung.<br />
Stand: 18.02.2008, 13:44:17