Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ...
Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ... Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ...
Verwendete Parameter Synchron-/Kommandopositionierung 04 STÖBER ANTRIEBSTECHNIK G.. Technologie Par. Beschreibung Feldbus- Adresse G34 Achse r=1, w=1 Referenzposition der Masterachse: Wert, der im Referenzpunkt als Ist-Position für die Master-Achse geladen wird. Der Referenzpunkt wird beim Referenzieren der Slave-Achse übernommen. Eine fortlaufende Nachreferenzierung ist über den Master-Referenzschalter möglich. HINWEIS Der Parameter ist identisch zu I34 der Slaveachse. 2C22h 0h Wertebereich in G49: -21474836.48 ... 0,00 ... 21474836.47 Feldbus: 1LSB=siehe G46; PDO ; Typ: P64; USS-Adr: 07 08 80 00 hex Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. G36 Achse Fortlaufende Master-Referenzierung: Eine steigende Flanke am Master-Referenzschalter- Eingang führt zum dynamischen Nachreferenzieren der Master-Istposition. 2C24h 0h r=1, w=1 ACHTUNG Im eingekoppelten Zustand führt ein Nachreferenzieren dazu, dass sich abrupt ein Schleppabstand in Höhe der Positionsänderung beim Nachreferenzieren ergibt. 0: inaktiv; 1: standard; im ganzen Verfahrbereich bzw. innerhalb einer Umlauflänge (Endlos-Achse) gibt es genau einen Referenzschalter. Beim Vorbeifahren an der Referenzflanke dieses Referenzschalters wird die Istposition automatisch korrigiert. 2: periodisch; entlang des Verfahrbereichs sind im Abstand von G41 Referenz-Periode mehrere Referenzschalter angeordnet, die jeweils zur Korrektur der Istposition führen. Feldbus: 1LSB=1; Typ: U8; USS-Adr: 07 09 00 00 hex Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. G37 Achse r=1, w=1 Referenzierung bei Netz-Ein: Bei 1:aktiv wird der Inkrementenrest der Masterposition und die aktuelle Position des Master-Encoders 100 ms nach Wegschalten der Gerätefreigabe gespeichert und nach Aus- und Wiedereinschalten des Gerätes rekonstruiert. Bei Singleturn-Absolutwertgebern (z.B. Resolver) wird nach Wiedereinschalten die Position nur dann rekonstruiert, wenn die Winkelabweichung kleiner 5° war. Bei Inkrementalgebern wird die Position immer rekonstruiert. 2C25h 0h HINWEIS Um die Funktion zu realisieren, muss zusätzlich I37 auf 2:gespeicherten Winkel rekonstruieren gestellt werden. 0: inaktiv; 1: aktiv; Feldbus: 1LSB=1; Typ: I8; USS-Adr: 07 09 40 00 hex G40 Achse Umlauflänge der Masterachse: Maximalwert für die Master-Ist-Position, ab welchem die Position wieder von Null an gezählt wird, z.B. 360 Grad (Modulo-Funktion). 2C28h 0h r=1, w=1 Wertebereich in G49: 0.00 ... 0,00 ... 47185919.97 Feldbus: 1LSB=siehe G46; Typ: P64; Rohwert:1LSB=Fnkt.Nr.19; USS-Adr: 07 0A 00 00 hex ID 441729.02 302
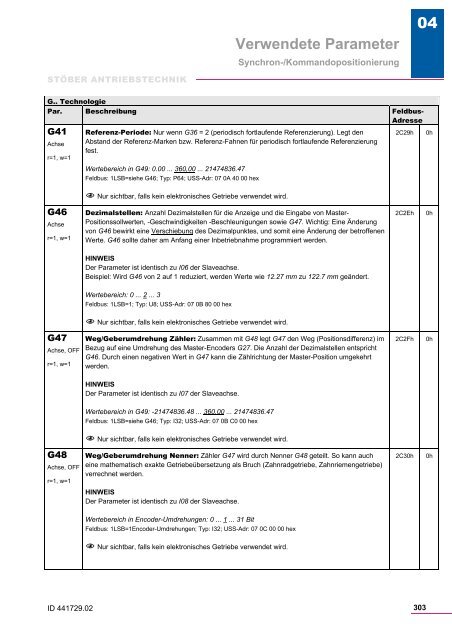
Verwendete Parameter Synchron-/Kommandopositionierung 04 STÖBER ANTRIEBSTECHNIK G.. Technologie Par. Beschreibung Feldbus- Adresse G41 Achse r=1, w=1 Referenz-Periode: Nur wenn G36 = 2 (periodisch fortlaufende Referenzierung). Legt den Abstand der Referenz-Marken bzw. Referenz-Fahnen für periodisch fortlaufende Referenzierung fest. Wertebereich in G49: 0.00 ... 360,00 ... 21474836.47 Feldbus: 1LSB=siehe G46; Typ: P64; USS-Adr: 07 0A 40 00 hex 2C29h 0h Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. G46 Achse r=1, w=1 Dezimalstellen: Anzahl Dezimalstellen für die Anzeige und die Eingabe von Master- Positionssollwerten, -Geschwindigkeiten -Beschleunigungen sowie G47. Wichtig: Eine Änderung von G46 bewirkt eine Verschiebung des Dezimalpunktes, und somit eine Änderung der betroffenen Werte. G46 sollte daher am Anfang einer Inbetriebnahme programmiert werden. 2C2Eh 0h HINWEIS Der Parameter ist identisch zu I06 der Slaveachse. Beispiel: Wird G46 von 2 auf 1 reduziert, werden Werte wie 12.27 mm zu 122.7 mm geändert. Wertebereich: 0 ... 2 ... 3 Feldbus: 1LSB=1; Typ: U8; USS-Adr: 07 0B 80 00 hex Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. G47 Achse, OFF r=1, w=1 Weg/Geberumdrehung Zähler: Zusammen mit G48 legt G47 den Weg (Positionsdifferenz) im Bezug auf eine Umdrehung des Master-Encoders G27. Die Anzahl der Dezimalstellen entspricht G46. Durch einen negativen Wert in G47 kann die Zählrichtung der Master-Position umgekehrt werden. 2C2Fh 0h HINWEIS Der Parameter ist identisch zu I07 der Slaveachse. Wertebereich in G49: -21474836.48 ... 360,00 ... 21474836.47 Feldbus: 1LSB=siehe G46; Typ: I32; USS-Adr: 07 0B C0 00 hex Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. G48 Achse, OFF r=1, w=1 Weg/Geberumdrehung Nenner: Zähler G47 wird durch Nenner G48 geteilt. So kann auch eine mathematisch exakte Getriebeübersetzung als Bruch (Zahnradgetriebe, Zahnriemengetriebe) verrechnet werden. 2C30h 0h HINWEIS Der Parameter ist identisch zu I08 der Slaveachse. Wertebereich in Encoder-Umdrehungen: 0 ... 1 ... 31 Bit Feldbus: 1LSB=1Encoder-Umdrehungen; Typ: I32; USS-Adr: 07 0C 00 00 hex Nur sichtbar, falls kein elektronisches Getriebe verwendet wird. ID 441729.02 303
- Seite 255 und 256: Verwendete Parameter Synchron-/Komm
- Seite 257 und 258: Verwendete Parameter Synchron-/Komm
- Seite 259 und 260: Verwendete Parameter Synchron-/Komm
- Seite 261 und 262: Verwendete Parameter Synchron-/Komm
- Seite 263 und 264: Verwendete Parameter Synchron-/Komm
- Seite 265 und 266: Verwendete Parameter Synchron-/Komm
- Seite 267 und 268: Verwendete Parameter Synchron-/Komm
- Seite 269 und 270: Verwendete Parameter Synchron-/Komm
- Seite 271 und 272: Verwendete Parameter Synchron-/Komm
- Seite 273 und 274: Verwendete Parameter Synchron-/Komm
- Seite 275 und 276: Verwendete Parameter Synchron-/Komm
- Seite 277 und 278: Verwendete Parameter Synchron-/Komm
- Seite 279 und 280: Verwendete Parameter Synchron-/Komm
- Seite 281 und 282: Verwendete Parameter Synchron-/Komm
- Seite 283 und 284: Verwendete Parameter Synchron-/Komm
- Seite 285 und 286: Verwendete Parameter Synchron-/Komm
- Seite 287 und 288: Verwendete Parameter Synchron-/Komm
- Seite 289 und 290: Verwendete Parameter Synchron-/Komm
- Seite 291 und 292: Verwendete Parameter Synchron-/Komm
- Seite 293 und 294: Verwendete Parameter Synchron-/Komm
- Seite 295 und 296: Verwendete Parameter Synchron-/Komm
- Seite 297 und 298: Verwendete Parameter Synchron-/Komm
- Seite 299 und 300: Verwendete Parameter Synchron-/Komm
- Seite 301 und 302: Verwendete Parameter Synchron-/Komm
- Seite 303 und 304: Verwendete Parameter Synchron-/Komm
- Seite 305: Verwendete Parameter Synchron-/Komm
- Seite 309 und 310: Verwendete Parameter Synchron-/Komm
- Seite 311 und 312: Verwendete Parameter Synchron-/Komm
- Seite 313 und 314: Verwendete Parameter Synchron-/Komm
- Seite 315 und 316: Verwendete Parameter Synchron-/Komm
- Seite 317 und 318: Verwendete Parameter Synchron-/Komm
- Seite 319 und 320: Verwendete Parameter Synchron-/Komm
- Seite 321 und 322: Verwendete Parameter Synchron-/Komm
- Seite 323 und 324: Verwendete Parameter Synchron-/Komm
- Seite 325 und 326: Verwendete Parameter Synchron-/Komm
- Seite 327 und 328: Verwendete Parameter Synchron-/Komm
- Seite 329 und 330: Verwendete Parameter Synchron-/Komm
- Seite 331 und 332: Verwendete Parameter Synchron-/Komm
- Seite 333 und 334: Verwendete Parameter Synchron-/Komm
- Seite 335 und 336: Verwendete Parameter Synchron-/Komm
- Seite 337 und 338: Verwendete Parameter Synchron-/Komm
- Seite 339 und 340: Verwendete Parameter Synchron-/Komm
- Seite 341 und 342: Verwendete Parameter Synchron-/Komm
- Seite 343 und 344: Verwendete Parameter Synchron-/Komm
- Seite 345 und 346: Verwendete Parameter Synchron-/Komm
- Seite 347 und 348: Verwendete Parameter Synchron-/Komm
- Seite 349 und 350: Verwendete Parameter Synchron-/Komm
- Seite 351 und 352: Verwendete Parameter Synchron-/Komm
- Seite 353 und 354: Verwendete Parameter Synchron-/Komm
- Seite 355 und 356: Verwendete Parameter Synchron-/Komm
<strong>Verwendete</strong> <strong>Parameter</strong><br />
Synchron-/Kommandopositionierung<br />
04<br />
STÖBER <strong>ANTRIEBSTECHNIK</strong><br />
G.. Technologie<br />
Par. Beschreibung Feldbus-<br />
Adresse<br />
G41<br />
Achse<br />
r=1, w=1<br />
Referenz-Periode: Nur wenn G36 = 2 (periodisch fortlaufende Referenzierung). Legt den<br />
Abstand der Referenz-Marken bzw. Referenz-Fahnen für periodisch fortlaufende Referenzierung<br />
fest.<br />
Wertebereich in G49: 0.00 ... 360,00 ... 21474836.47<br />
Feldbus: 1LSB=siehe G46; Typ: P64; USS-Adr: 07 0A 40 00 hex<br />
2C29h 0h<br />
Nur sichtbar, falls kein elektronisches Getriebe verwendet wird.<br />
G46<br />
Achse<br />
r=1, w=1<br />
Dezimalstellen: Anzahl Dezimalstellen für die Anzeige und die Eingabe von Master-<br />
Positionssollwerten, -Geschwindigkeiten -Beschleunigungen sowie G47. Wichtig: Eine Änderung<br />
von G46 bewirkt eine Verschiebung des Dezimalpunktes, und somit eine Änderung der betroffenen<br />
Werte. G46 sollte daher am Anfang einer Inbetriebnahme programmiert werden.<br />
2C2Eh<br />
0h<br />
HINWEIS<br />
Der <strong>Parameter</strong> ist identisch zu I06 der Slaveachse.<br />
Beispiel: Wird G46 von 2 auf 1 reduziert, werden Werte wie 12.27 mm zu 122.7 mm geändert.<br />
Wertebereich: 0 ... 2 ... 3<br />
Feldbus: 1LSB=1; Typ: U8; USS-Adr: 07 0B 80 00 hex<br />
Nur sichtbar, falls kein elektronisches Getriebe verwendet wird.<br />
G47<br />
Achse, OFF<br />
r=1, w=1<br />
Weg/Geberumdrehung Zähler: Zusammen mit G48 legt G47 den Weg (Positionsdifferenz) im<br />
Bezug auf eine Umdrehung des Master-Encoders G27. Die Anzahl der Dezimalstellen entspricht<br />
G46. Durch einen negativen Wert in G47 kann die Zählrichtung der Master-Position umgekehrt<br />
werden.<br />
2C2Fh<br />
0h<br />
HINWEIS<br />
Der <strong>Parameter</strong> ist identisch zu I07 der Slaveachse.<br />
Wertebereich in G49: -21474836.48 ... 360,00 ... 21474836.47<br />
Feldbus: 1LSB=siehe G46; Typ: I32; USS-Adr: 07 0B C0 00 hex<br />
Nur sichtbar, falls kein elektronisches Getriebe verwendet wird.<br />
G48<br />
Achse, OFF<br />
r=1, w=1<br />
Weg/Geberumdrehung Nenner: Zähler G47 wird durch Nenner G48 geteilt. So kann auch<br />
eine mathematisch exakte Getriebeübersetzung als Bruch (Zahnradgetriebe, Zahnriemengetriebe)<br />
verrechnet werden.<br />
2C30h<br />
0h<br />
HINWEIS<br />
Der <strong>Parameter</strong> ist identisch zu I08 der Slaveachse.<br />
Wertebereich in Encoder-Umdrehungen: 0 ... 1 ... 31 Bit<br />
Feldbus: 1LSB=1Encoder-Umdrehungen; Typ: I32; USS-Adr: 07 0C 00 00 hex<br />
Nur sichtbar, falls kein elektronisches Getriebe verwendet wird.<br />
ID 441729.02 303


