Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ...
Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ... Verwendete Parameter - STÃBER ANTRIEBSTECHNIK GmbH + Co ...
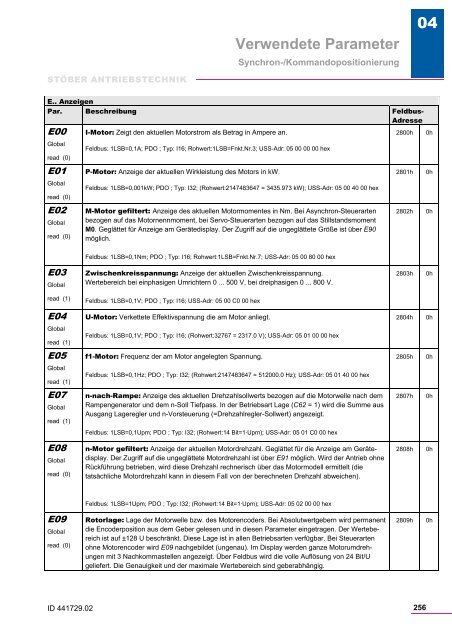
Verwendete Parameter Synchron-/Kommandopositionierung 04 STÖBER ANTRIEBSTECHNIK E.. Anzeigen Par. Beschreibung Feldbus- Adresse I-Motor: Zeigt den aktuellen Motorstrom als Betrag in Ampere an. 2800h 0h E00 Global read (0) E01 Global read (0) E02 Global read (0) Feldbus: 1LSB=0,1A; PDO ; Typ: I16; Rohwert:1LSB=Fnkt.Nr.3; USS-Adr: 05 00 00 00 hex P-Motor: Anzeige der aktuellen Wirkleistung des Motors in kW. Feldbus: 1LSB=0,001kW; PDO ; Typ: I32; (Rohwert:2147483647 = 3435.973 kW); USS-Adr: 05 00 40 00 hex M-Motor gefiltert: Anzeige des aktuellen Motormomentes in Nm. Bei Asynchron-Steuerarten bezogen auf das Motornennmoment, bei Servo-Steuerarten bezogen auf das Stillstandsmoment M0. Geglättet für Anzeige am Gerätedisplay. Der Zugriff auf die ungeglättete Größe ist über E90 möglich. 2801h 2802h 0h 0h Feldbus: 1LSB=0,1Nm; PDO ; Typ: I16; Rohwert:1LSB=Fnkt.Nr.7; USS-Adr: 05 00 80 00 hex E03 Global Zwischenkreisspannung: Anzeige der aktuellen Zwischenkreisspannung. Wertebereich bei einphasigen Umrichtern 0 ... 500 V, bei dreiphasigen 0 ... 800 V. 2803h 0h read (1) Feldbus: 1LSB=0,1V; PDO ; Typ: I16; USS-Adr: 05 00 C0 00 hex E04 U-Motor: Verkettete Effektivspannung die am Motor anliegt. 2804h 0h Global read (1) Feldbus: 1LSB=0,1V; PDO ; Typ: I16; (Rohwert:32767 = 2317.0 V); USS-Adr: 05 01 00 00 hex E05 f1-Motor: Frequenz der am Motor angelegten Spannung. 2805h 0h Global read (1) Feldbus: 1LSB=0,1Hz; PDO ; Typ: I32; (Rohwert:2147483647 = 512000.0 Hz); USS-Adr: 05 01 40 00 hex E07 Global read (1) n-nach-Rampe: Anzeige des aktuellen Drehzahlsollwerts bezogen auf die Motorwelle nach dem Rampengenerator und dem n-Soll Tiefpass. In der Betriebsart Lage (C62 = 1) wird die Summe aus Ausgang Lageregler und n-Vorsteuerung (=Drehzahlregler-Sollwert) angezeigt. 2807h 0h Feldbus: 1LSB=0,1Upm; PDO ; Typ: I32; (Rohwert:14 Bit=1·Upm); USS-Adr: 05 01 C0 00 hex E08 Global read (0) n-Motor gefiltert: Anzeige der aktuellen Motordrehzahl. Geglättet für die Anzeige am Gerätedisplay. Der Zugriff auf die ungeglättete Motordrehzahl ist über E91 möglich. Wird der Antrieb ohne Rückführung betrieben, wird diese Drehzahl rechnerisch über das Motormodell ermittelt (die tatsächliche Motordrehzahl kann in diesem Fall von der berechneten Drehzahl abweichen). 2808h 0h Feldbus: 1LSB=1Upm; PDO ; Typ: I32; (Rohwert:14 Bit=1·Upm); USS-Adr: 05 02 00 00 hex E09 Global read (0) Rotorlage: Lage der Motorwelle bzw. des Motorencoders. Bei Absolutwertgebern wird permanent die Encoderposition aus dem Geber gelesen und in diesen Parameter eingetragen. Der Wertebereich ist auf ±128 U beschränkt. Diese Lage ist in allen Betriebsarten verfügbar. Bei Steuerarten ohne Motorencoder wird E09 nachgebildet (ungenau). Im Display werden ganze Motorumdrehungen mit 3 Nachkommastellen angezeigt. Über Feldbus wird die volle Auflösung von 24 Bit/U geliefert. Die Genauigkeit und der maximale Wertebereich sind geberabhängig. 2809h 0h ID 441729.02 256
Verwendete Parameter Synchron-/Kommandopositionierung 04 STÖBER ANTRIEBSTECHNIK E.. Anzeigen Par. Beschreibung Feldbus- Adresse Wird E09 von einer übergeordneten Steuerung zur Lageerfassung ausgewertet, muss • Die Geberstrichzahl einer glatten Zweierpotenz entsprechen, • E09 zyklisch ausgelesen und • Die Position in der Steuerung aufakkumuliert werden. Feldbus: 1LSB=0,001Umdrehungen; PDO ; Typ: I32; (Rohwert:24 Bit=1·Umdrehungen); USS-Adr: 05 02 40 00 hex E10 Global read (1) AE1-Pegel: Pegel des am Analogeingang 1 (X100.1 - X100.3 ) anstehenden Signals (ohne Berücksichtigung von F11, F12). Um einen Offset zu kompensieren (der Wert, der am Umrichter ankommt, wenn die Steuerung 0 V vorgibt), muss dieser mit umgekehrtem Vorzeichen in F11 eingegeben werden. 280Ah 0h Feldbus: 1LSB=0,001V; PDO ; Typ: I16; (Rohwert:32767 = 20.000 V); USS-Adr: 05 02 80 00 hex E11 Global read (1) AE2-Pegel: Pegel des am Analogeingang 2 (X100.4 - X100.5 ) anstehenden Signals (ohne Berücksichtigung von F21, F22). Um einen Offset zu kompensieren (der Wert, der am Umrichter ankommt, wenn die Steuerung 0 V vorgibt), muss dieser mit umgekehrtem Vorzeichen in F21 eingegeben werden. 280Bh 0h Feldbus: 1LSB=0,001V; PDO ; Typ: I16; (Rohwert:32767 = 20.000 V); USS-Adr: 05 02 C0 00 hex E12 Temperatur Motor: Über den Motortemperaturfühler an X2 gemessene Temperatur. 280Ch 0h Global read (1) Feldbus: 1LSB=1°C; PDO ; Typ: I16; (Rohwert:32767 = 328 °C); USS-Adr: 05 03 00 00 hex Nur wenn B38 ungleich 0 ist. E14 Global read (2) Laderelais: Zustand des internen Laderelais. Aktiv bedeutet, der Relaiskontakt ist geschlossen, die Ladewiderstände vom Netz zum Zwischenkreis sind überbrückt. Beim Einschalten der Netzspannung bleibt das Laderelais zunächst offen. Es schließt, wenn der Zwischenkreis über die Ladewiderstände aufgeladen ist. 280Eh 0h HINWEIS Stellen Sie sicher, dass die Laderelais-Kontakte geöffnet sind (E14 = 0:inaktiv), bevor Sie die Netzversorgung zuschalten. Beachten Sie besonders in einem Zwischenkreisverbund, dass die Laderelais aller verbundenen Umrichter vor dem Zuschalten der Netzversorgung geöffnet sind. 0: inaktiv; 1: aktiv; Feldbus: 1LSB=1; Typ: B; USS-Adr: 05 03 80 00 hex E15 Global n-Motorencoder: Aus dem in B26 angegebenen Motorencoder ermittelte Drehzahl. Diese Anzeige funktioniert auch, wenn die Steuerart in B20 keinen Geber erfordert. 280Fh 0h read (1) Feldbus: 1LSB=0,1Upm; PDO ; Typ: I32; (Rohwert:14 Bit=1·Upm); USS-Adr: 05 03 C0 00 hex E16 Global AnalogAusg.1-Pegel: Anzeige des Pegels am Analogausgang (X100.6 und X100.7). ±16384 werden als ±10 V ausgegeben. 2810h 0h read (1) Feldbus: 1LSB=0,001V; PDO ; Typ: I16; (Rohwert:32767 = 20.000 V); USS-Adr: 05 04 00 00 hex ID 441729.02 257
- Seite 209 und 210: Verwendete Parameter Synchron-/Komm
- Seite 211 und 212: Verwendete Parameter Synchron-/Komm
- Seite 213 und 214: Verwendete Parameter Synchron-/Komm
- Seite 215 und 216: Verwendete Parameter Synchron-/Komm
- Seite 217 und 218: Verwendete Parameter Synchron-/Komm
- Seite 219 und 220: Verwendete Parameter Synchron-/Komm
- Seite 221 und 222: Verwendete Parameter Synchron-/Komm
- Seite 223 und 224: Verwendete Parameter Synchron-/Komm
- Seite 225 und 226: Verwendete Parameter Synchron-/Komm
- Seite 227 und 228: Verwendete Parameter Synchron-/Komm
- Seite 229 und 230: Verwendete Parameter Synchron-/Komm
- Seite 231 und 232: Verwendete Parameter Synchron-/Komm
- Seite 233 und 234: Verwendete Parameter Synchron-/Komm
- Seite 235 und 236: Verwendete Parameter Synchron-/Komm
- Seite 237 und 238: Verwendete Parameter Synchron-/Komm
- Seite 239 und 240: Verwendete Parameter Synchron-/Komm
- Seite 241 und 242: Verwendete Parameter Synchron-/Komm
- Seite 243 und 244: Verwendete Parameter Synchron-/Komm
- Seite 245 und 246: Verwendete Parameter Synchron-/Komm
- Seite 247 und 248: Verwendete Parameter Synchron-/Komm
- Seite 249 und 250: Verwendete Parameter Synchron-/Komm
- Seite 251 und 252: Verwendete Parameter Synchron-/Komm
- Seite 253 und 254: Verwendete Parameter Synchron-/Komm
- Seite 255 und 256: Verwendete Parameter Synchron-/Komm
- Seite 257 und 258: Verwendete Parameter Synchron-/Komm
- Seite 259: Verwendete Parameter Synchron-/Komm
- Seite 263 und 264: Verwendete Parameter Synchron-/Komm
- Seite 265 und 266: Verwendete Parameter Synchron-/Komm
- Seite 267 und 268: Verwendete Parameter Synchron-/Komm
- Seite 269 und 270: Verwendete Parameter Synchron-/Komm
- Seite 271 und 272: Verwendete Parameter Synchron-/Komm
- Seite 273 und 274: Verwendete Parameter Synchron-/Komm
- Seite 275 und 276: Verwendete Parameter Synchron-/Komm
- Seite 277 und 278: Verwendete Parameter Synchron-/Komm
- Seite 279 und 280: Verwendete Parameter Synchron-/Komm
- Seite 281 und 282: Verwendete Parameter Synchron-/Komm
- Seite 283 und 284: Verwendete Parameter Synchron-/Komm
- Seite 285 und 286: Verwendete Parameter Synchron-/Komm
- Seite 287 und 288: Verwendete Parameter Synchron-/Komm
- Seite 289 und 290: Verwendete Parameter Synchron-/Komm
- Seite 291 und 292: Verwendete Parameter Synchron-/Komm
- Seite 293 und 294: Verwendete Parameter Synchron-/Komm
- Seite 295 und 296: Verwendete Parameter Synchron-/Komm
- Seite 297 und 298: Verwendete Parameter Synchron-/Komm
- Seite 299 und 300: Verwendete Parameter Synchron-/Komm
- Seite 301 und 302: Verwendete Parameter Synchron-/Komm
- Seite 303 und 304: Verwendete Parameter Synchron-/Komm
- Seite 305 und 306: Verwendete Parameter Synchron-/Komm
- Seite 307 und 308: Verwendete Parameter Synchron-/Komm
- Seite 309 und 310: Verwendete Parameter Synchron-/Komm
<strong>Verwendete</strong> <strong>Parameter</strong><br />
Synchron-/Kommandopositionierung<br />
04<br />
STÖBER <strong>ANTRIEBSTECHNIK</strong><br />
E.. Anzeigen<br />
Par. Beschreibung Feldbus-<br />
Adresse<br />
I-Motor: Zeigt den aktuellen Motorstrom als Betrag in Ampere an.<br />
2800h 0h<br />
E00<br />
Global<br />
read (0)<br />
E01<br />
Global<br />
read (0)<br />
E02<br />
Global<br />
read (0)<br />
Feldbus: 1LSB=0,1A; PDO ; Typ: I16; Rohwert:1LSB=Fnkt.Nr.3; USS-Adr: 05 00 00 00 hex<br />
P-Motor: Anzeige der aktuellen Wirkleistung des Motors in kW.<br />
Feldbus: 1LSB=0,001kW; PDO ; Typ: I32; (Rohwert:2147483647 = 3435.973 kW); USS-Adr: 05 00 40 00 hex<br />
M-Motor gefiltert: Anzeige des aktuellen Motormomentes in Nm. Bei Asynchron-Steuerarten<br />
bezogen auf das Motornennmoment, bei Servo-Steuerarten bezogen auf das Stillstandsmoment<br />
M0. Geglättet für Anzeige am Gerätedisplay. Der Zugriff auf die ungeglättete Größe ist über E90<br />
möglich.<br />
2801h<br />
2802h<br />
0h<br />
0h<br />
Feldbus: 1LSB=0,1Nm; PDO ; Typ: I16; Rohwert:1LSB=Fnkt.Nr.7; USS-Adr: 05 00 80 00 hex<br />
E03<br />
Global<br />
Zwischenkreisspannung: Anzeige der aktuellen Zwischenkreisspannung.<br />
Wertebereich bei einphasigen Umrichtern 0 ... 500 V, bei dreiphasigen 0 ... 800 V.<br />
2803h<br />
0h<br />
read (1)<br />
Feldbus: 1LSB=0,1V; PDO ; Typ: I16; USS-Adr: 05 00 C0 00 hex<br />
E04<br />
U-Motor: Verkettete Effektivspannung die am Motor anliegt.<br />
2804h<br />
0h<br />
Global<br />
read (1)<br />
Feldbus: 1LSB=0,1V; PDO ; Typ: I16; (Rohwert:32767 = 2317.0 V); USS-Adr: 05 01 00 00 hex<br />
E05<br />
f1-Motor: Frequenz der am Motor angelegten Spannung.<br />
2805h<br />
0h<br />
Global<br />
read (1)<br />
Feldbus: 1LSB=0,1Hz; PDO ; Typ: I32; (Rohwert:2147483647 = 512000.0 Hz); USS-Adr: 05 01 40 00 hex<br />
E07<br />
Global<br />
read (1)<br />
n-nach-Rampe: Anzeige des aktuellen Drehzahlsollwerts bezogen auf die Motorwelle nach dem<br />
Rampengenerator und dem n-Soll Tiefpass. In der Betriebsart Lage (C62 = 1) wird die Summe aus<br />
Ausgang Lageregler und n-Vorsteuerung (=Drehzahlregler-Sollwert) angezeigt.<br />
2807h<br />
0h<br />
Feldbus: 1LSB=0,1Upm; PDO ; Typ: I32; (Rohwert:14 Bit=1·Upm); USS-Adr: 05 01 C0 00 hex<br />
E08<br />
Global<br />
read (0)<br />
n-Motor gefiltert: Anzeige der aktuellen Motordrehzahl. Geglättet für die Anzeige am Gerätedisplay.<br />
Der Zugriff auf die ungeglättete Motordrehzahl ist über E91 möglich. Wird der Antrieb ohne<br />
Rückführung betrieben, wird diese Drehzahl rechnerisch über das Motormodell ermittelt (die<br />
tatsächliche Motordrehzahl kann in diesem Fall von der berechneten Drehzahl abweichen).<br />
2808h<br />
0h<br />
Feldbus: 1LSB=1Upm; PDO ; Typ: I32; (Rohwert:14 Bit=1·Upm); USS-Adr: 05 02 00 00 hex<br />
E09<br />
Global<br />
read (0)<br />
Rotorlage: Lage der Motorwelle bzw. des Motorencoders. Bei Absolutwertgebern wird permanent<br />
die Encoderposition aus dem Geber gelesen und in diesen <strong>Parameter</strong> eingetragen. Der Wertebereich<br />
ist auf ±128 U beschränkt. Diese Lage ist in allen Betriebsarten verfügbar. Bei Steuerarten<br />
ohne Motorencoder wird E09 nachgebildet (ungenau). Im Display werden ganze Motorumdrehungen<br />
mit 3 Nachkommastellen angezeigt. Über Feldbus wird die volle Auflösung von 24 Bit/U<br />
geliefert. Die Genauigkeit und der maximale Wertebereich sind geberabhängig.<br />
2809h<br />
0h<br />
ID 441729.02 256


