isel-Servo-Leistungsendstufe UVE 8012 - Bedienungsanleitungen ...
isel-Servo-Leistungsendstufe UVE 8012 - Bedienungsanleitungen ...
isel-Servo-Leistungsendstufe UVE 8012 - Bedienungsanleitungen ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>isel</strong>-<strong>Servo</strong>-<strong>Leistungsendstufe</strong> <strong>UVE</strong> <strong>8012</strong><br />
<strong>isel</strong>automation KG<br />
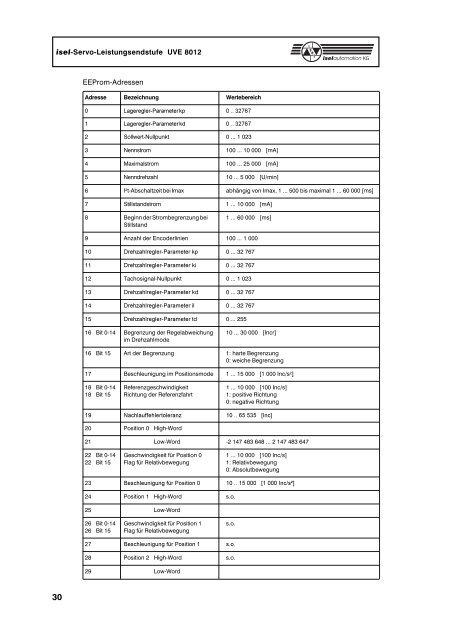
EEProm-Adressen<br />
Adresse Bezeichnung Wertebereich<br />
0 Lageregler-Parameter kp 0 .. 32767<br />
1 Lageregler-Parameter kd 0 .. 32767<br />
2 Sollwert-Nullpunkt 0 ... 1 023<br />
3 Nennstrom 100 ... 10 000 [mA]<br />
4 Maximalstrom 100 ... 25 000 [mA]<br />
5 Nenndrehzahl 10 ... 5 000 [U/min]<br />
6 I²t-Abschaltzeit bei Imax abhängig von Imax, 1 ... 500 bis maximal 1 ... 60 000 [ms]<br />
7 Stillstandstrom 1 ... 10 000 [mA]<br />
8 Beginn der Strombegrenzung bei 1 ... 60 000 [ms]<br />
Stillstand<br />
9 Anzahl der Encoderlinien 100 ... 1 000<br />
10 Drehzahlregler-Parameter kp 0 ... 32 767<br />
11 Drehzahlregler-Parameter ki 0 ... 32 767<br />
12 Tachosignal-Nullpunkt 0 ... 1 023<br />
13 Drehzahlregler-Parameter kd 0 ... 32 767<br />
14 Drehzahlregler-Parameter il 0 ... 32 767<br />
15 Drehzahlregler-Parameter td 0 ... 255<br />
16 Bit 0-14 Begrenzung der Regelabweichung 10 ... 30 000 [Incr]<br />
im Drehzahlmode<br />
16 Bit 15 Art der Begrenzung 1: harte Begrenzung<br />
0: weiche Begrenzung<br />
17 Beschleunigung im Positionsmode 1 ... 15 000 [1 000 Inc/s²]<br />
18 Bit 0-14 Referenzgeschwindigkeit 1 ... 10 000 [100 Inc/s]<br />
18 Bit 15 Richtung der Referenzfahrt 1: positive Richtung<br />
0: negative Richtung<br />
19 Nachlauffehlertoleranz 10 .. 65 535 [Inc]<br />
20 Position 0 High-Word<br />
21 Low-Word -2 147 483 648 ... 2 147 483 647<br />
22 Bit 0-14 Geschwindigkeit für Position 0 1 ... 10 000 [100 Inc/s]<br />
22 Bit 15 Flag für Relativbewegung 1: Relativbewegung<br />
0: Absolutbewegung<br />
23 Beschleunigung für Position 0 10 .. 15 000 [1 000 Inc/s²]<br />
24 Position 1 High-Word s.o.<br />
25 Low-Word<br />
26 Bit 0-14 Geschwindigkeit für Position 1 s.o.<br />
26 Bit 15 Flag für Relativbewegung<br />
27 Beschleunigung für Position 1 s.o.<br />
28 Position 2 High-Word s.o.<br />
29 Low-Word<br />
30