

Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt
Download - tuprints - Technische Universität Darmstadt

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5 Maschinelle Umfeldwahrnehmung<br />
200<br />
Erforderliche Sensorreichweiten am Gate<br />
Sensorreichweite in x-Richtung in m<br />
150<br />
100<br />
50<br />
0<br />
-50<br />
III<br />
II<br />
IV<br />
I<br />
-100<br />
-150<br />
200 150 100 50 0 -50 -100 -150 -200<br />
Sensorreichweite in y-Richtung m<br />
120 km/h 100 km/h 90 km/h 70 km/h 50 km/h 30 km/h<br />
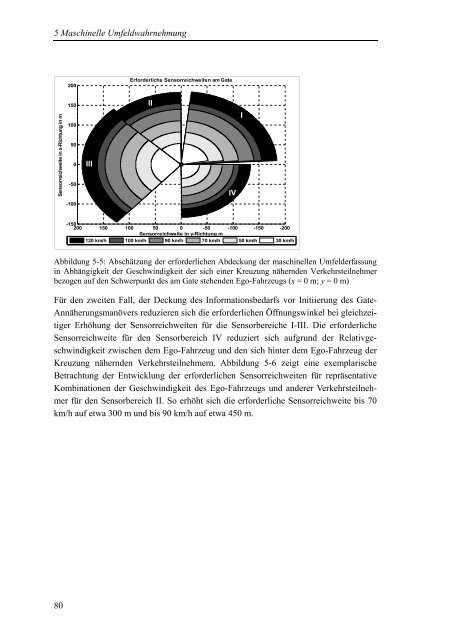
Abbildung 5-5: Abschätzung der erforderlichen Abdeckung der maschinellen Umfelderfassung<br />
in Abhängigkeit der Geschwindigkeit der sich einer Kreuzung nähernden Verkehrsteilnehmer<br />
bezogen auf den Schwerpunkt des am Gate stehenden Ego-Fahrzeugs (x = 0 m; y = 0 m)<br />
Für den zweiten Fall, der Deckung des Informationsbedarfs vor Initiierung des Gate-<br />
Annäherungsmanövers reduzieren sich die erforderlichen Öffnungswinkel bei gleichzeitiger<br />
Erhöhung der Sensorreichweiten für die Sensorbereiche I-III. Die erforderliche<br />
Sensorreichweite für den Sensorbereich IV reduziert sich aufgrund der Relativgeschwindigkeit<br />
zwischen dem Ego-Fahrzeug und den sich hinter dem Ego-Fahrzeug der<br />
Kreuzung nähernden Verkehrsteilnehmern. Abbildung 5-6 zeigt eine exemplarische<br />
Betrachtung der Entwicklung der erforderlichen Sensorreichweiten für repräsentative<br />
Kombinationen der Geschwindigkeit des Ego-Fahrzeugs und anderer Verkehrsteilnehmer<br />
für den Sensorbereich II. So erhöht sich die erforderliche Sensorreichweite bis 70<br />
km/h auf etwa 300 m und bis 90 km/h auf etwa 450 m.<br />
80













