Skript
Skript
Skript

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
d.h. die Genauigkeit der Approximation durch den zentralen Differenzenquotienten<br />
hängt von der Glattheit der exakten Daten f ab. Betrachten wir nun die<br />
Situation für unsere gestörte Funktion (1.1). Es gilt:<br />
f δ (x + h) − f δ (x − h)<br />
2h<br />
der Fehler der Approximation beträgt also<br />
∼<br />
O(h ν ) + δ h ,<br />
f(x + h) − f(x − h)<br />
2h<br />
+ δ h ,<br />
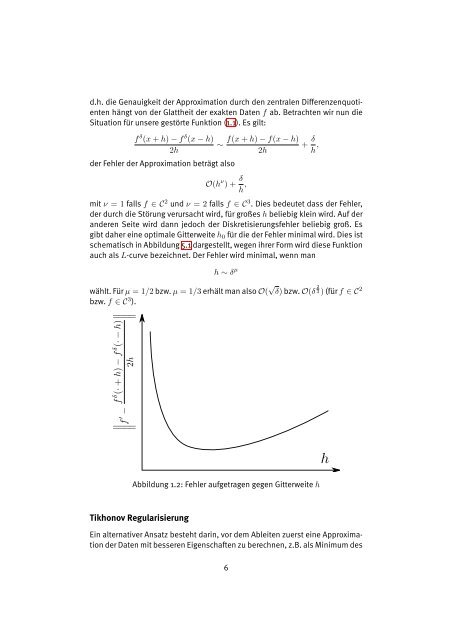
mit ν = 1 falls f ∈ C 2 und ν = 2 falls f ∈ C 3 . Dies bedeutet dass der Fehler,<br />
der durch die Störung verursacht wird, für großes h beliebig klein wird. Auf der<br />
anderen Seite wird dann jedoch der Diskretisierungsfehler beliebig groß. Es<br />
gibt daher eine optimale Gitterweite h 0 für die der Fehler minimal wird. Dies ist<br />
schematisch in Abbildung 5.1 dargestellt, wegen ihrer Form wird diese Funktion<br />
auch als L-curve bezeichnet. Der Fehler wird minimal, wenn man<br />
h ∼ δ µ<br />
wählt. Für µ = 1/2 bzw. µ = 1/3 erhält man also O( √ δ) bzw. O(δ 2 3 ) (für f ∈ C 2<br />
bzw. f ∈ C 3 ).<br />
Abbildung 1.2: Fehler aufgetragen gegen Gitterweite h<br />
Tikhonov Regularisierung<br />
Ein alternativer Ansatz besteht darin, vor dem Ableiten zuerst eine Approximation<br />
der Daten mit besseren Eigenschaften zu berechnen, z.B. als Minimum des<br />
6