e - Institut für Angewandte Mechanik
e - Institut für Angewandte Mechanik
e - Institut für Angewandte Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
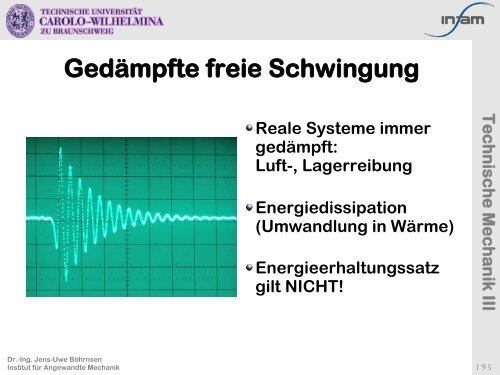
Gedämpfte freie Schwingung<br />
Reale Systeme immer<br />
gedämpft:<br />
Luft-, Lagerreibung<br />
Energiedissipation<br />
(Umwandlung in Wärme)<br />
Energieerhaltungssatz<br />
gilt NICHT!<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
1 9 5
Gedämpfte freie Schwingung<br />
COULOMBsche Reibung<br />
Reibungskraft<br />
R= N , N =mg , R= mg<br />
Reibungskraft entgegen der<br />
Bewegungsrichtung<br />
Rückstellkraft aus Feder<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
1 9 6
Gedämpfte freie Schwingung<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Bewegung nach NEWTON<br />
→: m ẍ= {<br />
− c x− R <strong>für</strong> ẋ0,<br />
}<br />
− c xR <strong>für</strong> ẋ0<br />
→: m ẍcx= {<br />
− R <strong>für</strong> ẋ0,<br />
R <strong>für</strong> ẋ0 }<br />
Mit<br />
Ergibt sich<br />
2 = c m , r= R c<br />
ẍ 2 x={ −2 r <strong>für</strong> ẋ0,<br />
2 r <strong>für</strong> ẋ0 }<br />
Technische <strong>Mechanik</strong> III<br />
1 9 7
Gedämpfte freie Schwingung<br />
Umkehr der Bewegungsrichtung<br />
1. Abschnitt: nach links<br />
ẍ 2 x= 2 r<br />
Rechte Seite ungleich Null:<br />
inhomogene DGL<br />
Schwingungs-DGL des<br />
Einmassenschwingers mit konstanter<br />
Belastung<br />
Allgemeine Lösung:<br />
Lösung aus Homogener DGL +<br />
Partikularlösung<br />
Technische <strong>Mechanik</strong> III<br />
x=x h<br />
x p<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
1 9 8
Lösen einer inhomogenen DGL<br />
Inhomogene DGL: Einmassenschwinger mit<br />
konstanter Belastung (Reibung)<br />
Lösung der Homogenen Gleichung (ungedämpft)<br />
Partikularlösung (gedämpft)<br />
Gesamtlösung<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
ẍ 2 x= 2 r<br />
ẍ 2 x=0<br />
x h<br />
t 1<br />
=A 1<br />
cost 1<br />
B 1<br />
sin t 1<br />
x p<br />
=r= 2 r<br />
2<br />
0 2 r= 2 r<br />
xt 1<br />
=x h<br />
x p<br />
=A 1<br />
cost 1<br />
B 1<br />
sin t 1<br />
r<br />
Technische <strong>Mechanik</strong> III<br />
1 9 9
Lösen der inhomogenen DGL<br />
Gesamtlösung<br />
xt 1<br />
=x h<br />
x p<br />
=A 1<br />
cost 1<br />
B 1<br />
sin t 1<br />
r<br />
Konstanten aus den Anfangsbedingungen<br />
xt 1<br />
=0=A 1<br />
r=x 0<br />
A 1<br />
=x 0<br />
−r<br />
ẋt 1<br />
=0= B 1<br />
=0 B 1<br />
=0<br />
Bewegung im ersten Abschnitt (nach links)<br />
xt 1<br />
= x 0<br />
− rcos t 1<br />
r<br />
Technische <strong>Mechanik</strong> III<br />
ẋt 1<br />
=− x 0<br />
− rsin t 1<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 0
Lösen der DGL im 2. Abschnitt<br />
Geschwindigkeit gleich Null und Auslenkung Max.<br />
zum Zeitpunkt t 1<br />
=/<br />
x/= x 0 − rcos r=−x 02r<br />
ẋ/=− x 0 − rsin =0<br />
Bewegungsrichtung dreht sich um<br />
ẍ 2 x=− 2 r<br />
Allgemeine Lösung der DGL mit 'neuer' Zeit<br />
xt 2<br />
=x h<br />
x p<br />
=A 2<br />
cost 2<br />
B 2<br />
sin t 2<br />
−r<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 1
Lösen der DGL (2.Abschnitt)<br />
Konstanten aus den Übergangsbedingungen vom<br />
1. Abschnitt zum 2. Abschnitt<br />
xt 1<br />
=/=−x 0<br />
2r<br />
xt 2<br />
=A 2<br />
cost 2<br />
B 2<br />
sin t 2<br />
−r<br />
Lage<br />
xt 2 =0=x t 1 = → A 2=− x 0 3r<br />
Geschwindigkeit<br />
ẋt 2 =0=ẋ t 1 = → B 2=0<br />
Ende 1. Abschnitt<br />
Lösung <strong>für</strong> 2. Abschnitt<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 2
Bewegungsgleichung: Weg-Zeit<br />
r= R c<br />
Weg-Zeit-Diagramm<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Lösung 1. Abschnitt (n. Links)<br />
xt 1<br />
= x 0<br />
− rcost 1<br />
r<br />
x 0<br />
−r<br />
r<br />
Amplitude<br />
Verschoben<br />
Lösung 2. Abschnitt (n. Rechts)<br />
xt s2<br />
=− x 0<br />
−3rcost 2<br />
−r<br />
Amplitude<br />
Verschoben<br />
x 0<br />
−3r<br />
−r<br />
Bei jeder Halbschwingung<br />
nimmt die Amplitude ab, um<br />
Wenn x kleiner r : Klotz bleibt<br />
liegen (Federkraft zu klein)<br />
2 r<br />
Technische <strong>Mechanik</strong> III<br />
2 0 3
Viskose Dämpfung<br />
Dämpfung ist Geschwindigkeitsabhängig<br />
Flüssigkeitsreibung (Stoßdämpfer)<br />
Lineare Dämpfungskraft<br />
F d<br />
=d v , d <br />
[<br />
N<br />
] m/ s = [ Ns<br />
m<br />
Kraft ist der Geschwindigkeit<br />
entgegen gerichtet<br />
]<br />
Dämpfungskonstante<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 4
Gedämpftes Feder-Masse-System<br />
Koordinate von Ruhelage aus<br />
Rückstellkraft<br />
Dämpfungskraft<br />
Bewegungsgleichung<br />
↓:m ẍ=−c x− d ẋ<br />
m ẍd ẋc x=0<br />
F R<br />
=c x<br />
F D<br />
=d ẋ<br />
Technische <strong>Mechanik</strong> III<br />
ẍ d m ẋ c m x=0<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 5
DGL gedämpfte Schwingung<br />
Abklingkoeffizient<br />
2= d m<br />
Eigenfrequenz (ungedämpft)<br />
2 = c m<br />
Differentialgleichung<br />
ẍ2 ẋ 2 x=0<br />
Lösung mit Exponentialansatz<br />
x=A e t<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 6
Charakteristische Gleichung<br />
Exponentialansatz einsetzen ergibt die<br />
Charakteristische Gleichung<br />
2 2 2 =0<br />
Quadratische Gleichung (zwei Lösungen)<br />
1,2<br />
=−± 2 − 2<br />
Mit Dämpfungsgrad<br />
D= <br />
1,2<br />
=−± D 2 −1<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 7
Starke Dämpfung<br />
Starke Dämpfung:<br />
1,2<br />
=−± D 2 −1<br />
Reelle Werte<br />
1,2<br />
=−± ,<br />
D1<br />
= D 2 −1<br />
Gesamtlösung ist Linearkombination aus<br />
beiden Teillösungen<br />
xt=A 1 e t 1<br />
A 2 e 2t =e − t A 1 e t A 2 e −t <br />
A 1,<br />
A 2 aus<br />
Bestimmung der Konstanten<br />
Anfangsbedingungen<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
x0=x 0,<br />
ẋ0=v 0<br />
2 0 8
Starke Dämpfung: Abklingkurve<br />
D1<br />
xt=e − t A 1<br />
e t A 2<br />
e −t <br />
2= d m<br />
= D 2 −1<br />
2 = c m<br />
D= <br />
Höchstens einen Extremwert und höchstens<br />
einen Nulldurchgang<br />
Kriechbewegung <strong>für</strong> unterschiedliche<br />
Anfangsgeschwindigkeiten<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 0 9
Aperiodischer Grenzfall<br />
D=1<br />
Wie starke Dämpfung und schneller<br />
gegen Null<br />
Allgemeine Lösung lautet<br />
1,2<br />
=−± D 2 −1<br />
1<br />
= 2<br />
=−<br />
xt=A 1 e 1 t A 2 t e 1t = A 1 A 2 te − t<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 1 0
Schwache Dämpfung<br />
D1<br />
Radikant wird negativ, Lsg.<br />
d. charakteristischen Gl.<br />
Allgemeine Lösung<br />
Kreisfrequenz der<br />
Gedämpften Schwingung<br />
i=−1 d<br />
=1− D 2<br />
λ 1,2<br />
=− ± i 1− D 2 =− ± i d<br />
xt=A 1 e 1 t A 2 e 2t =e − t A 1 e i d t A 2 e −i d t <br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 1 1
Schwache Dämpfung<br />
Umformung mit<br />
e ±i d t =cos d t ± i sin d t<br />
Ergibt sich<br />
zu:<br />
xt=e − t A 1 e i d t A 2 e −i d t <br />
xt=e − t [ A 1<br />
A 2<br />
cos d<br />
ti A 1<br />
− A 2<br />
sin d<br />
t ]<br />
bzw.:<br />
=e − t Acos d<br />
tB sin d<br />
t<br />
xt=C e − t cos d<br />
t −<br />
Neue Konstanten<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 1 2
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Schwache Dämpfung<br />
xtT d =C e −tT d cos d t −<br />
xt=C e − t cos d<br />
t −<br />
Amplitude nimmt exponentiell ab<br />
± C e −t Einhüllende<br />
C , <br />
Integrationskonstanten aus<br />
Anfgangsbedingungen<br />
Verhältnis von zwei Ausschlägen<br />
nach Schwingungsdauer<br />
xt<br />
xtT d<br />
=eT d<br />
Technische <strong>Mechanik</strong> III<br />
2 1 3
Schwache Dämpfung<br />
Logarithmisches Dekrement:<br />
Logarithmus aus dem Verhältnis von zwei<br />
Ausschlägen im Abstand der Schwingungsdauer<br />
=ln<br />
xt<br />
xtT d<br />
=T d= 2<br />
d<br />
=2 D<br />
1− D 2<br />
Experimentell die Abnahme der Amplitude<br />
bestimmen und das Dämpfungsmaß berechnen<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 1 4
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Beispiel<br />
Welche Dämpfungskonstante,<br />
damit das System schwach<br />
gedämpft ist?<br />
Bewegungsgleichung <strong>für</strong><br />
Anfangsgeschwindigkeit durch<br />
Gleichgewichtslage?<br />
Lösung:<br />
˙<br />
0<br />
-Momentensatz bzgl. A aufstellen<br />
-Bewegungs-DGL ergibt sich<br />
-Bedingung <strong>für</strong> Dämpfungskonstante<br />
berechnen<br />
Technische <strong>Mechanik</strong> III<br />
2 1 5
Beispiel: Bewegungs-DGL<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Momentensatz um A<br />
Bewegungs-DGL<br />
mit:<br />
A<br />
=2a 2 m<br />
F c<br />
=c a <br />
A ¨=−aF c<br />
−3aF d<br />
F d<br />
=d 3a ˙<br />
→ 4m ¨9 d ˙c=0<br />
¨2 2 =0<br />
2=9d /4m , 2 =c/4m<br />
Technische <strong>Mechanik</strong> III<br />
2 1 6
Beispiel: Bedingung <strong>für</strong> Dämpfung<br />
DGL<br />
¨2 2 =0<br />
Schwache Dämpfung <strong>für</strong>:<br />
D1<br />
2=9d/4m , 2 =c/4m<br />
D= = 9d<br />
8m 2 m c = 9 d<br />
4 mc 1<br />
Dämpfungskonstante<br />
d 4 9 mc<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 1 7
Beispiel: Bewegungsgleichung<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Allgemeine Lösung<br />
t =C e −t cos d<br />
t−<br />
Frequenz im Beispiel<br />
d<br />
=1− D 2 = 1 2 c m <br />
Integrationkonstanten aus<br />
Anfangsbedingungen<br />
DGL<br />
1−<br />
81 d<br />
2<br />
16 mc<br />
0=0, ˙0= 0 = 2, C= ˙<br />
t = ˙ 0<br />
d<br />
e − t sin d<br />
t<br />
0<br />
d<br />
Technische <strong>Mechanik</strong> III<br />
2 1 8
Erzwungene Schwingung<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Äußere Kraft regt das System mit<br />
Erregerfrequenz an<br />
F=F 0<br />
cost<br />
Koordinate von Ruhelage aus<br />
Bewegungsgleichung<br />
↓: m ẍ=−c xF 0<br />
cost<br />
m ẍc x=F 0<br />
cos t<br />
rechte Seite nicht Null!<br />
Inhomogene DGL<br />
Eigenfrequenz (freie Schwingung) und<br />
Statische Verlängerung<br />
2 = c m , x 0= F 0<br />
c<br />
Technische <strong>Mechanik</strong> III<br />
2 1 9
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Erzwungene Schwingung<br />
Bewegungsgleichung wird zu<br />
ẍ 2 x= 2 x 0<br />
cos t<br />
Allgemeine Lösung einer inhomogenen<br />
DGL: x=x h<br />
x p<br />
Lsg. aus homogner + partikular Lsg.<br />
Homogne Lösung<br />
x h<br />
=C cost −<br />
Partikularlösung vom Typ der rechten<br />
Seite<br />
x p<br />
=x 0<br />
V cost<br />
einsetzen in DGL Bestimmung von V<br />
− x 0<br />
V 2 cost 2 x 0<br />
V cost= 2 x 0<br />
cost<br />
Technische <strong>Mechanik</strong> III<br />
2 2 0
Erzwungene Schwingung<br />
Dimensionslose Größe V<br />
→V =<br />
2<br />
2 − = 1<br />
2 1− 2<br />
Frequenzverhältnis, die Abstimmung<br />
(Erregerfrequenz zu Eigenfrequenz)<br />
= <br />
Allgemeine Lösung der DGL<br />
xt=x h<br />
x p<br />
=C cost −x 0<br />
V cost<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 2 1
Erzwungene Schwingung<br />
V = 1<br />
1− 2<br />
Nach Einschwingvorgang klingt<br />
homogene Lösung wg. Dämpfung ab,<br />
es verbleibt die Partikular Lösung<br />
xt=x 0<br />
V cos t<br />
Resonanz<br />
1 ⇒V ∞<br />
Überkritisch<br />
Unterkritisch<br />
1<br />
1<br />
Technische <strong>Mechanik</strong> III<br />
Vergrößerungsfunktion V<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
= <br />
2 2 2
Erzwungene Schwingung:<br />
Resonanz<br />
Im Resonanzfall ist die<br />
Partikularlösung nicht gültig<br />
1 ⇒V ∞<br />
Es gilt der Ansatz<br />
als Lösung der DGL<br />
Ableiten<br />
=<br />
x p<br />
=x 0<br />
V t sin t=x 0<br />
V t sin t<br />
ẋ p<br />
=x 0<br />
V sin tx 0<br />
V t cost<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
ẍ p<br />
=2x 0<br />
V cost−x 0<br />
V 2 t sin t<br />
2 2 3
Erzwungene Schwingung:<br />
Resonanz<br />
Einsetzen<br />
2 x 0<br />
V cost − x 0<br />
V 2 t sin t 2 x 0<br />
V t sin t=<br />
2 x 0<br />
cost<br />
→ V = 2<br />
x p<br />
= 1 2 x 0t sin t<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
2 2 4