e - Institut für Angewandte Mechanik
e - Institut für Angewandte Mechanik
e - Institut für Angewandte Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
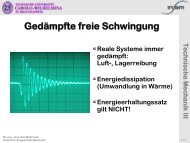
VL 5<br />
Impulssatz, Stoß<br />
Momentensatz<br />
Arbeitssatz<br />
Energiesatz<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
5 7
Impulssatz, Stoß<br />
Integration des 2. NEWTONschen Axioms<br />
d<br />
dt m ẋ= d m v=F<br />
dt<br />
Führt auf den Impulssatz<br />
m v−m v 0<br />
= ∫ t<br />
Der Impuls ist gegeben durch<br />
t 0<br />
p=m v=m ẋ<br />
F d t<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
5 8
Impulssatz, Stoß<br />
Wirkt keine Kraft bleibt der Impuls konstant<br />
Stoßkraft ergibt sich aus Integration der Kraft<br />
Für Stoßvorgänge gilt<br />
p=m v=m v 0<br />
=const.<br />
F= ∫ t s<br />
0<br />
F dt<br />
F=mv−v 0<br />
<br />
t s<br />
Stoßzeit<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
5 9
Impulssatz, Stoß<br />
v=v 0<br />
v=0<br />
t M<br />
v=v<br />
Kompression<br />
-Kraft wächst bis Max.<br />
-Körper verformen sich<br />
F<br />
K<br />
=m⋅0−mv 0<br />
=<br />
Restitution<br />
∫ t M<br />
t=0<br />
K dt<br />
-Kraft sinkt bis auf Null<br />
-Körper entspannen sich<br />
F R<br />
=mv−m⋅0= ∫ t s<br />
t M<br />
R dt<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 0
Impulssatz, Stoß<br />
In Komponenten<br />
F x<br />
=m v x −m v x<br />
F y<br />
=m v y −m v y<br />
Winkelbeziehungen<br />
v x<br />
=−v cos ,<br />
v x<br />
=v cos ,<br />
Glatte Wand<br />
F y<br />
=0 <br />
v y<br />
=v sin <br />
v y<br />
=v sin <br />
v y<br />
=v y<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 1
Impulssatz, Stoß<br />
Ideal elastischer Stoß<br />
Vollständige Rückbildung<br />
daher:<br />
F<br />
R<br />
= F<br />
K<br />
m v x<br />
=−m v x<br />
v x<br />
=−v x<br />
Einfallswinkel = Ausfallswinkel<br />
=<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 2
Impulssatz, Stoß<br />
Ideal-Plastischer Stoß<br />
Keine Restitution<br />
also<br />
F R<br />
=0<br />
v x =0=v cos = 2<br />
Massenpunkt rutscht entlang der<br />
glatten Wand mit<br />
v= v y<br />
=v y<br />
90°<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 3
Impulssatz, Stoß<br />
Teilelastischer Stoß<br />
teilweise Restitution<br />
reale Bedingungen<br />
Stoßzahl<br />
F<br />
R<br />
=e F<br />
K<br />
e<br />
ideal-elastisch<br />
ideal-plastisch<br />
teilelastisch (real)<br />
e=1<br />
e=0<br />
0≤e≤1<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 4
Impulssatz, Stoß<br />
Teilelastischer Stoß<br />
F<br />
R<br />
=e <br />
einsetzen<br />
und<br />
wegen<br />
folgt<br />
F K<br />
m v x<br />
=e−m v x<br />
<br />
v x<br />
=−e v x<br />
v<br />
tan = y<br />
= = 1 v x<br />
−e v x<br />
e tan <br />
e≤1<br />
≥<br />
v y<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 5
Impulssatz, Stoß<br />
Stoßzahl<br />
Experimentell Bestimmung<br />
freier Fall<br />
nach dem Aufprall<br />
es folgt<br />
e=− v x<br />
v x<br />
v=2 g h 1<br />
h 2<br />
= v 2<br />
2g v=2 g h 2<br />
e=− v<br />
v = 2 g h 2<br />
<br />
e= h 2<br />
2 g h 1<br />
h 1<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 6
Impulssatz, Stoß<br />
Tennisball: Qualitätsprüfung<br />
Ideal-elastisch<br />
h 2<br />
=h 1<br />
Ideal-plastisch<br />
h 2<br />
=0<br />
teilelastisch<br />
h 2<br />
≤h 1<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 7
Momentensatz<br />
Statik:<br />
M 0 =r×F<br />
Kinetik:<br />
L 0 =r× p=r×m v<br />
Kraft x Hebelarm = Moment<br />
Impuls x Abstand = Impulsmoment<br />
auch: Drehimpulsvektor oder Drallvektor<br />
Senkrecht auf Ortsvektor und<br />
Geschwindigkeitsvektor<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 8
Momentensatz<br />
Ortsvektor vom festen<br />
Pkt. Zum Massenpunkt<br />
r<br />
Geschwindigkeitsvektor<br />
v<br />
Betrag vom Drallvektor<br />
L 0 =r ⊥<br />
m v<br />
Impuls x Abstand<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
6 9
Momentensatz<br />
Zusammenhang zwischen Drehimpuls und Moment<br />
NETONsche Axiom mit Ortsvektor multiplizieren<br />
Umformung ergibt<br />
also<br />
r×m d v<br />
dt<br />
d L 0<br />
dt<br />
M 0<br />
r× m d v<br />
dt =r×F<br />
= d dt<br />
r×m v<br />
= d L0<br />
dt<br />
L 0<br />
=M 0 Zeitl. Änderung des Drehimpulses<br />
Ist gleich dem Moment<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 0
Momentensatz<br />
Falls das Moment verschwindet<br />
Bewegung in 2-D (x,y Ebene)<br />
nur z-Komponente<br />
also<br />
d L z<br />
0<br />
dt<br />
M 0 =0 L 0 =r×mv=const.<br />
=M z<br />
0<br />
L 0 =r ⊥<br />
m v<br />
L 0 =mx v y<br />
− y v x<br />
<br />
Drall konstant<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 1
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Momentensatz<br />
Sonderfall: Kreisbewegung<br />
also<br />
v=r =r ˙<br />
L 0 =m r v=m r 2 <br />
Massenträgheitsmoment<br />
m r 2 = 0<br />
Drehimpuls wird zu<br />
L 0 = 0 <br />
Momentensatz<br />
M 0 = 0 ¨<br />
Technische <strong>Mechanik</strong> III<br />
7 2
Technische <strong>Mechanik</strong> III<br />
Momentensatz<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 3
Momentensatz<br />
Beispiel: Punktpendel<br />
∑ M A =−mgl sin = A ¨<br />
A =m l 2<br />
mit:<br />
folgt:<br />
−mgl sin =ml 2 ¨<br />
¨ g sin =0<br />
l<br />
Für kleine Winkel gilt:<br />
sin ≈ ¨ g l =0<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 4
Arbeitssatz, Energiesatz<br />
NEWTONsche Axiom mit kleiner Lageänderung<br />
m d v<br />
dt d r=F d r ,<br />
einsetzen und Integration<br />
∫ v 1<br />
v 0<br />
m v d v= ∫ r 1<br />
⇒ m v 2<br />
1<br />
2 − m v 2<br />
0<br />
2<br />
r 0<br />
= ∫ r 1<br />
r 0<br />
F d r<br />
F d r<br />
<br />
d r=v dt<br />
Kinetische Arbeit W der Kraft F<br />
Energie E k<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 5
Arbeitssatz, Energiesatz<br />
Arbeitssatz<br />
Einheit: Kraft x Weg<br />
E k1<br />
−E k0<br />
=W<br />
Die Arbeit welche die Kräfte zwischen<br />
Zwei Bahnpunkten verrichten<br />
Ist gleich der Änderung der<br />
Kinetischen Energie<br />
W , E k<br />
[1 Nm]=[1 Joule]<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 6
Arbeitssatz, Energiesatz<br />
Am Massenpunkt greifen eingeprägte und<br />
Zwangskräfte an.<br />
-Zwangskräfte (Reaktionskräfte) senkrecht zur<br />
Bahn! Daher keine Arbeit!<br />
Arbeitsintegral<br />
W = ∫ r 1<br />
r 0<br />
F e ⋅d r<br />
Nur die eingeprägten Kräfte verrichten Arbeit!<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 7
Arbeitssatz, Energiesatz<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Beispiel: Klotz auf schiefer<br />
Ebene, mit Reibung!<br />
Gewicht:<br />
Reibung:<br />
Für<br />
Arbeitssatz:<br />
W G<br />
=mg sin x<br />
W R<br />
=−R x=− N x<br />
W R<br />
=− mg cos x<br />
0 v 0<br />
=0, 1 v=v 1<br />
1<br />
2 m v 2 1−0=mg sin x−mg cos x<br />
Technische <strong>Mechanik</strong> III<br />
7 8
Arbeitssatz, Energiesatz<br />
Arbeitssatz:<br />
1<br />
2 m v 1<br />
2<br />
<br />
E kin<br />
Mit:<br />
folgt:<br />
=mg sin x−mg cos x<br />
∑ W<br />
h=x sin <br />
v 1 =2gh1−cot <br />
Bewegung nur <strong>für</strong><br />
cot 1 tan <br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
7 9
Arbeitssatz, Energiesatz<br />
Leistung:<br />
P= dW dt<br />
Pro Zeiteinheit verrichtete Arbeit<br />
, dW =F⋅d r<br />
P=F⋅v , [1W]=[ 1 Nm s ]<br />
Wirkungsgrad: Nutzarbeit zu Aufgewendeter Arbeit<br />
= P N<br />
P A<br />
,<br />
1<br />
(Infinitesimale Änderung)<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 0
Arbeitssatz, Energiesatz<br />
Einfache Form:<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
Für Konservative Kräfte<br />
Konservative Kräfte:<br />
-Arbeit ist unabhängig vom Weg<br />
-Sie besitzen ein Potential<br />
W = ∫ 1<br />
0<br />
Es ergibt sich die Arbeit zu:<br />
F=F x<br />
e x<br />
F y<br />
e y<br />
F z<br />
e z<br />
F d r= ∫ 1<br />
0<br />
F x<br />
dxF y<br />
dyF z<br />
dz <br />
Das Integral ist wegunabhängig falls<br />
Integrand vollständiges Differential<br />
Technische <strong>Mechanik</strong> III<br />
8 1
Arbeitssatz, Energiesatz<br />
Potential oder potentielle Energie<br />
−d E P<br />
=F x<br />
dxF y<br />
dyF z<br />
dz<br />
Totales Differential<br />
d E P = ∂ E p<br />
∂ x dx∂ E p<br />
∂ y dy∂ E p<br />
∂ z dz<br />
vergleichen liefert<br />
F x =− ∂ E p<br />
∂ x ,<br />
F y=− ∂ E p<br />
∂ y ,<br />
F z=− ∂ E p<br />
∂ z<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 2
Arbeitssatz, Energiesatz<br />
Kraft<br />
F x =− ∂ E p<br />
∂ x ,<br />
Gradient einführen<br />
grad E P = ∂ E p<br />
∂ x e x ∂ E p<br />
∂ y e y ∂ E p<br />
∂ z e z<br />
also<br />
F=−grad E p<br />
F y=− ∂ E p<br />
∂ y ,<br />
F z=− ∂ E p<br />
∂ z<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 3
Arbeitssatz, Energiesatz<br />
Kraft<br />
F x =− ∂ E p<br />
∂ x ,<br />
F y=− ∂ E p<br />
∂ y ,<br />
x-Komponente nach y Ableiten<br />
y-Komponente nach x Ableiten<br />
⋮<br />
Es folgt bei zyklischem Vertauschen d. Koordinaten<br />
∂ F x<br />
∂ y =−∂ F y<br />
∂ x ,<br />
∂ F y<br />
∂ z =−∂ F z<br />
∂ y ,<br />
F z=− ∂ E p<br />
∂ z<br />
∂ F z<br />
∂ x =−∂ F x<br />
∂ z<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 4
Arbeitssatz, Energiesatz<br />
Überprüfen, ob Kraft aus Potential abgeleitet<br />
werden kann.<br />
=∣<br />
Mit Rotation:<br />
∂<br />
e x<br />
e y<br />
e z<br />
∂ x<br />
rot F<br />
∂ ∂ ∂<br />
∂ x ∂ y ∂ z<br />
F x<br />
F y<br />
F z∣=∇×F=<br />
×<br />
∂<br />
∂ y<br />
∂<br />
∂ z<br />
F<br />
x<br />
F y<br />
F z<br />
<br />
= ∂ F z<br />
∂ y −∂ F y<br />
∂ z e x ∂ F x<br />
∂ z −∂ F z<br />
∂ x e y ∂ F y<br />
∂ x − ∂ F x<br />
∂ y e z=0<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 5
Arbeitssatz, Energiesatz<br />
Für wirbelfreies Kraftfeld<br />
somit besitzen die Kräfte ein Potential und es gilt<br />
dW =−dE p<br />
Für die Arbeit folgt<br />
W = ∫ 1<br />
0<br />
rot F =0<br />
Änderung der Arbeit gleich<br />
Änderung der Potentiellen Energie<br />
dW =− ∫ 1<br />
0<br />
dE p<br />
=−E p1<br />
−E p0<br />
<br />
Potentielle Energie abhängig vom Bezugssystem<br />
Änderung zw. (0) und (1) unabhängig davon!<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 6
Arbeitssatz, Energiesatz<br />
Energiesatz<br />
E k1<br />
E p1<br />
=E k0<br />
E p0<br />
=const.<br />
Bei konservativen Systemen (Kräfte haben ein<br />
Potential) bleibt bei der Bewegung die Summe aus<br />
kinetischer und potentieller Energie konstant!<br />
Potential der Gewichtskraft<br />
Potential der Federkraft<br />
Reibung ist nicht konservativ:<br />
!Arbeitssatz anwenden!<br />
E p<br />
=G z<br />
E p<br />
= 1 2 cx2 , E p<br />
= 1 2 c T<br />
2<br />
Technische <strong>Mechanik</strong> III<br />
Dr.-Ing. Jens-Uwe Böhrnsen<br />
<strong>Institut</strong> <strong>für</strong> <strong>Angewandte</strong> <strong>Mechanik</strong><br />
8 7