Berechnung und Optimierung von Bolzen-Lasche-Verbindungen
Berechnung und Optimierung von Bolzen-Lasche-Verbindungen
Berechnung und Optimierung von Bolzen-Lasche-Verbindungen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
22 IMW - Institutsmitteilung Nr. 19 (1994)<br />
Anhang: Formelsammlung zur <strong>Berechnung</strong> <strong>von</strong> <strong>Bolzen</strong>-<strong>Lasche</strong>-<strong>Verbindungen</strong><br />
bei elastischen Beanspruchungen<br />
A1<br />
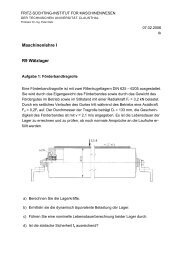
Schnittgrößen für die unterschiedlichen Belastungstypen<br />
Lastfall<br />
Schnittgrößen<br />
Q(ϕ)<br />
M(ϕ)<br />
Punktlast<br />
ρ cos ϕ<br />
ϕ<br />
α<br />
ρ sin ϕ<br />
N(ϕ)<br />
F s<br />
ϕ M s<br />
ϕ<br />
ρ<br />
F n<br />
NPL( ϕ)= Fn sin ϕ + Fq<br />
cos ϕ<br />
QPL( ϕ)= Fq sin ϕ − Fn<br />
cos ϕ<br />
M ( ϕ)= F ρ( 1 −sin<br />
ϕ)− F ( l+<br />
ρ cos ϕ)−<br />
M<br />
PL n q b<br />
Q(ϕ)<br />
M(ϕ)<br />
Streckenlast<br />
ϕ<br />
N(ϕ)<br />
2<br />
N ( ϕ)= F sin ϕ + F cos ϕ<br />
SL n q<br />
( )<br />
Q ( ϕ)= F − F cos ϕ sin ϕ<br />
SL q n<br />
α<br />
r i sin ϕ<br />
r i<br />
F S<br />
ϕ<br />
q<br />
F s<br />
ϕ M s<br />
ϕ<br />
F n<br />
M<br />
SL<br />
⎛ ri<br />
⎞<br />
2<br />
( ϕ)= ⎜1 − ⎟ F ρ cos ϕ − F ( l+<br />
ρ cos ϕ)−<br />
M<br />
⎝ 2 ρ⎠<br />
n q b<br />
Drucklast<br />
Q(ϕ)<br />
M(ϕ)<br />
N(ϕ)<br />
⎛ 2 α − ϕ<br />
2sin<br />
⎞<br />
NDL( ϕ)=<br />
F<br />
⎜ 2<br />
n<br />
− sin ϕ<br />
⎟<br />
+ Fq<br />
cos ϕ<br />
⎜ sin α<br />
⎟<br />
⎝<br />
⎠<br />
ϕ<br />
α<br />
F D<br />
(α−ϕ)/2<br />
(α+ϕ)/2<br />
F s<br />
p<br />
ϕ M s<br />
ϕ<br />
F n<br />
⎛ α −ϕ α −ϕ<br />
2sin<br />
cos<br />
⎞<br />
QDL( ϕ)=<br />
F<br />
⎜ 2 2<br />
n<br />
− cos ϕ<br />
⎟<br />
+ Fq<br />
sin ϕ<br />
⎜ sin α<br />
⎟<br />
⎝<br />
⎠<br />
⎛<br />
2 α − ϕ<br />
2sin<br />
⎞<br />
MDL( ϕ)= Fn ρ<br />
⎜<br />
1 − 2 − sin ϕ<br />
⎟<br />
− Fq<br />
l+<br />
ρ ϕ<br />
⎜ α<br />
( cos )− M b<br />
sin<br />
⎟<br />
⎝<br />
⎠
IMW - Institutsmitteilung Nr. 19 (1994)<br />
23<br />
A2 Verformungsgleichungen für die unterschiedlichen Lastfälle nach Bild 4.1<br />
Lastfall<br />
Punktlast<br />
F s<br />
β PL<br />
δ PL<br />
β<br />
PL<br />
Verformungen<br />
Fz ρ ϕ κ ϕ Fs ρ ϕ Ms<br />
ϕ κ<br />
(<br />
[ 1− ( 1+<br />
)− cos ]+ sin + ( 1+<br />
)<br />
ϕ)=<br />
A Eκ<br />
r<br />
( )= ( ) +<br />
L<br />
δPL<br />
ϕ βPL<br />
ϕ ρ cosϕ<br />
2<br />
Fz ρ( 1−2sinα −cos α)+ Fs ρ( α + sinαcosα)+<br />
2Mssinα<br />
+<br />
2A Eκ<br />
L<br />
M s<br />
F z<br />
F s<br />
Streckenlast<br />
q<br />
β SL<br />
F z<br />
Drucklast<br />
F<br />
p s<br />
β DL<br />
F z<br />
δ SL<br />
M s<br />
δ DL<br />
M s<br />
β<br />
SL<br />
( ) +<br />
i<br />
ϕ ϕ ϕ κ ρ ϕ κ ϕ ϕ<br />
ϕ F r + cos sin ( 1 )− 2 ( 1+<br />
2 )+ cos sin<br />
( )=<br />
n<br />
4AE<br />
L<br />
κρ<br />
ρsinϕ<br />
ϕ( 1 + κ)<br />
+ Fs<br />
+ Ms<br />
AE κρ AE κρ<br />
δ ϕ β ϕ ρ cosϕ<br />
L<br />
( )= ( ) +<br />
SL SL n<br />
( ) +<br />
2<br />
sinϕ ri<br />
− 2ρ 2 cos ϕ<br />
F<br />
6AEκ<br />
ρϕ+<br />
cosϕsinϕ<br />
sinϕ<br />
+ Fs<br />
Ms<br />
2A Eκ<br />
AE κ<br />
L<br />
L<br />
L<br />
[ ] +<br />
( )( + ) +<br />
2<br />
Fnρϕ ( − sinϕϕ( 1 + κ)−<br />
cosϕsinϕ)+ Fsρsin ϕ+<br />
Msϕsinϕ<br />
βDL( ϕ)=<br />
AE<br />
L<br />
κρsinϕ<br />
41 ( − cosϕ) ( 1−<br />
sinϕ)−<br />
sinϕsin2ϕ<br />
δDL( ϕ)= βSL( ϕ) ρ cosϕ + Fn<br />
ρ<br />
+<br />
4AEκsinϕ<br />
( ) +<br />
sinϕ<br />
1−<br />
cos2ϕ<br />
+ Fs<br />
ρ<br />
4AEκsinϕ<br />
L<br />
M<br />
s<br />
L<br />
sinϕ<br />
1−<br />
cos2ϕ<br />
AEκsinϕ<br />
L<br />
L<br />
( )<br />
A3 Lagerreaktionen für unterschiedliche Fesselung nach Bild 4.2<br />
A 3.1 Punktlast nach Bild 4.1 <strong>und</strong> unterschiedliche Lagerung nach Bild 4.2<br />
Skizze<br />
Fesselungsbezeichnung <strong>und</strong> Schnittgrößen<br />
Typ 1: Enden frei beweglich<br />
F<br />
PL1<br />
M<br />
PL1<br />
= 0<br />
= 0<br />
F z<br />
F z<br />
F PL2<br />
Typ 2: Enden verdrehbar, nicht verschieblich<br />
F<br />
PL2<br />
M<br />
PL2<br />
2<br />
ρ{ 2cos α[ α( 1+<br />
κ)−<br />
1]+ 3cos α + 2sin<br />
α −1}+<br />
+ 2l[ α( 1+<br />
κ)+ cos α −1]<br />
= 3Fz<br />
J ρ<br />
2<br />
⎡ρ ( α + 3cos<br />
α sin α)+<br />
⎤<br />
3J⎢<br />
⎥ +<br />
2<br />
⎣⎢<br />
+ 2ρ l[ α( 1+<br />
κ) cos α + 2sin<br />
α]+ 2l<br />
α( 1+<br />
κ)<br />
⎦⎥<br />
= 0<br />
+ 2A<br />
L<br />
κρl<br />
3
24 IMW - Institutsmitteilung Nr. 19 (1994)<br />
A3.1 Punktlast nach Bild 4.1 <strong>und</strong> unterschiedliche Lagerung nach Bild 4.2 (Fortsetzung)<br />
Skizze<br />
Fesselungsbezeichnung <strong>und</strong> Schnittgrößen<br />
Typ 3: Enden verschieblich, nicht verdrehbar<br />
F z<br />
M PL3<br />
F<br />
PL3<br />
M<br />
PL3<br />
= 0<br />
1 1<br />
= Fz<br />
J ρ α ( + κ )+ cos α −<br />
Jα( 1 + κ)+<br />
A κ ρ l<br />
L<br />
F PL4<br />
F z<br />
M PL4<br />
Typ 4: Enden eingespannt<br />
F<br />
PL4<br />
M<br />
PL3<br />
2<br />
J{ α( 1+<br />
κ) ( cos α − 1)+ 2sin( 1−cosα)<br />
}+<br />
⎧⎪<br />
2cosαα<br />
[ ( 1+<br />
κ)−<br />
1]+<br />
⎫⎪<br />
+ Al<br />
L<br />
κ l[ α( 1+<br />
κ)+ cosα −1]+<br />
ρ⎨<br />
⎬<br />
2<br />
⎩⎪ + 3cos<br />
α + 2sinα<br />
−1⎭⎪<br />
= 6FJr<br />
n 2 2<br />
6J<br />
ραα [ ( + cosαsin) ( 1+<br />
κ)−<br />
2sin<br />
α]+<br />
2<br />
⎧⎪<br />
2αl<br />
( 1+<br />
κ)+ 3lρ[ αcosα( 1+<br />
κ)+<br />
2sinα]+<br />
⎫⎪<br />
+ 2AJ L<br />
κl⎨<br />
⎬<br />
2<br />
⎩⎪ + 3ρ ( α + 3cosαsinα)<br />
⎭⎪ +<br />
2 2 4<br />
+ ALκ<br />
l ρ<br />
2<br />
l[ α( cos α − 1) ( 1+<br />
κ )+ 2sinα( 1 − cosα)<br />
]+<br />
6J<br />
⎧⎪<br />
1 1<br />
ρ α [ − ( +<br />
+<br />
κ )( α + cosαsinα)−<br />
cosα]−⎫⎪<br />
+<br />
⎨<br />
⎬<br />
⎩⎪ −sinα( 1−cosα −2sinα)<br />
⎭⎪<br />
2κl[ α( 1+<br />
κ)+ cosα<br />
−1]+<br />
2<br />
+ Al<br />
L ⎧⎪<br />
2cosαα<br />
[ ( 1+<br />
κ)−<br />
1]+<br />
⎫⎪<br />
+ 3κρ⎨<br />
⎬<br />
2<br />
⎩⎪ + 3cos<br />
α + 2sinα<br />
−1⎭⎪<br />
= Fz<br />
Jρ<br />
2<br />
2<br />
6J<br />
ραα [ ( + cosαsinα) ( 1+<br />
κ) − 2sin<br />
α]+<br />
2<br />
⎧⎪<br />
2αl<br />
( 1+<br />
κ)+ 3ρl[ αcosα( 1+<br />
κ)+<br />
2sinα]+<br />
⎫⎪<br />
+ 2JA<br />
κ ⎨<br />
⎬<br />
⎩⎪ + 3 ( + 3 )<br />
⎭⎪ +<br />
L<br />
l<br />
2<br />
ρ α cosαsinα<br />
2 2 4<br />
+ A κ l ρ<br />
L
IMW - Institutsmitteilung Nr. 19 (1994)<br />
25<br />
A 3.2: Streckenlast nach Bild 4.1 <strong>und</strong> unterschiedliche Lagerung nach Bild 4.2<br />
Skizze<br />
Fesselungsbezeichnung <strong>und</strong> Schnittgrößen<br />
Typ 1: Enden frei<br />
q<br />
F<br />
SL1<br />
M<br />
SL1<br />
= 0<br />
= 0<br />
F z<br />
Typ 2: Enden verdrehbar, nicht verschieblich<br />
q<br />
F z<br />
F SL2<br />
F<br />
= FI<br />
SL2<br />
n y<br />
M<br />
SL2<br />
= 0<br />
6ρl[ α( 1+<br />
2κ)+<br />
cosαsinα]−<br />
− 3lri<br />
( α + cosαsinα) ( 1+<br />
κ)+<br />
2 2<br />
+ 2ρ [ 3αcosα( 1+<br />
2κ)+ sinα( 4+<br />
5cos<br />
α)<br />
]−<br />
{ [ ]}<br />
2<br />
− ρri<br />
3αcosα( 1+<br />
κ)+ sinα 4+ cos α( 5+<br />
3κ)<br />
2<br />
⎧⎪<br />
2αl<br />
( 1+<br />
κ)+<br />
2ρl[ cosα( 1+<br />
κ)+<br />
2sinα]+<br />
⎫⎪<br />
6Iy<br />
⎨<br />
⎬<br />
2<br />
⎩⎪ + ρ ( α + 3cosαsinα)<br />
⎭⎪ +<br />
3<br />
+ 4Aκl<br />
ρ<br />
L<br />
Typ 3: Enden verschieblich, nicht verdrehbar<br />
q<br />
F z<br />
M SL3<br />
F<br />
SL3<br />
M<br />
= 0<br />
= FI<br />
SL3<br />
n y<br />
2ρα [ ( 1+<br />
2κ)+<br />
cosαsinα]− ri<br />
( α+<br />
cosαsinα) ( 1+<br />
κ)<br />
4 I α( 1+<br />
κ)+<br />
Aκlρ<br />
[ y<br />
L ]<br />
Typ 34: Enden eingespannt<br />
q<br />
F SL4<br />
F z<br />
M SL4<br />
keine geschlossene Lösung
26 IMW - Institutsmitteilung Nr. 19 (1994)<br />
A 3.3: Drucklast nach Bild 4.1 <strong>und</strong> unterschiedliche Lagerung nach Bild 4.2<br />
Skizze<br />
Fesselungsbezeichnung <strong>und</strong> Schnittgrößen<br />
Typ 1: Enden frei<br />
p<br />
F<br />
DL1<br />
M<br />
DL1<br />
= 0<br />
= 0<br />
F z<br />
Typ 2: Enden verdrehbar, nicht verschieblich<br />
p<br />
F z<br />
F DL2<br />
F<br />
4l[ sin αα( 1+<br />
κ)+ cos αsin<br />
α−α]+<br />
⎡4cos<br />
α sin α α( 1+<br />
κ)−<br />
⎤<br />
+ ρ⎢<br />
⎥<br />
3FJ<br />
− 2 + 2 + 4−3<br />
z<br />
ρ<br />
( )<br />
=<br />
⎣ α cos α sin α cos α ⎦<br />
sin α ⎡12l<br />
α( 1 + κ)+ 12ρ l[ α( 1 + κ) cos α + 2sin<br />
α]+<br />
⎤<br />
J⎢<br />
⎥ +<br />
2<br />
⎣⎢<br />
+ ρ ( 6α + 12cos α sin α + 3sin<br />
2α)<br />
⎦⎥<br />
DL2 2<br />
M<br />
DL2<br />
= 0<br />
+ 4A<br />
L<br />
κρl<br />
3<br />
Typ 3: Enden verschieblich, nicht verdrehbar<br />
p<br />
F z<br />
M DL3<br />
F<br />
DL3<br />
M<br />
DL3<br />
= 0<br />
FJ<br />
z<br />
ρ sin αα [ ( 1 + κ)+<br />
cos α]−<br />
α<br />
=<br />
sin α Jα( 1 + κ)+<br />
Aκ ρ s<br />
Typ 34: Enden eingespannt<br />
p<br />
keine geschlossene Lösung<br />
F DL4<br />
F z<br />
M DL4