Vektorrechnung - imng
Vektorrechnung - imng
Vektorrechnung - imng

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Vektorrechnung</strong><br />
Das Handout ist Bestandteil der Vortragsfolien zur Höheren Mathematik; siehe die Hinweise auf der Internetseite<br />
www.<strong>imng</strong>.uni-stuttgart.de/LstNumGeoMod/VHM/ für Erläuterungen zur Nutzung und zum Copyright.<br />
<strong>Vektorrechnung</strong> 1-1
Kartesisches Koordinatensystem in der Ebene und im<br />
Raum<br />
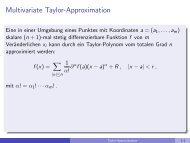
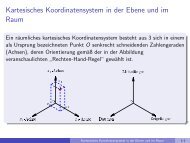
Ein räumliches kartesisches Koordinatensystem besteht aus 3 sich in einem<br />
ÖÔÐÑÒØ× Ü¿¹×<br />
als Ursprung bezeichneten Punkt O senkrecht schneidenden Zahlengeraden<br />
(Achsen), deren Orientierung gemäß der in der Abbildung<br />
veranschaulichten Rechten-Hand-Regel“ gewählt ist.<br />
” ܽ¹× ܽÇ<br />
ÅØØЬÒÖ<br />
ܾÈËÖÖÔÐÑÒØ× Ü¾¹× ÙÑÒ Ç ¬ÒÖ<br />
<strong>Vektorrechnung</strong> – Koordinaten Kartesisches Koordinatensystem in der Ebene und im Raum 1-1
Ein Punkt X wird durch seine als Koordinaten x i bezeichneten Werte der<br />
Projektionen auf die Achsen festgelegt: X = (x 1 , x 2 , x 3 ). Verwendet man<br />
keine Indexschreibweise, so bezeichnet man die Koordinaten üblicherweise<br />
mit (x, y, z) und die Zahlenachsen als x-, y- und z-Achse.<br />
Analog definiert man ein ebenenes kartesisches Koordinatensystem.<br />
<strong>Vektorrechnung</strong> – Koordinaten Kartesisches Koordinatensystem in der Ebene und im Raum 1-2
Beispiel:<br />
Grafik-Fenster:<br />
Objekte in Pixel-Koordinaten, meist bezogen auf die linke obere Bildecke<br />
20 40 60 80 100 120<br />
10<br />
(74, 8)<br />
20<br />
30<br />
40<br />
50<br />
60<br />
70<br />
(85, 69)<br />
80<br />
(30, 80)<br />
90<br />
<strong>Vektorrechnung</strong> – Koordinaten Kartesisches Koordinatensystem in der Ebene und im Raum 2-1
Kugelkoordinaten<br />
Ein Punkt P = (x, y, z) kann durch seinen Abstand r = |OP| zum<br />
Ursprung, den Winkel ϕ zwischen der x-Achse und der Projektion von OP<br />
auf die xy-Ebene und dem Winkel ϑ ∈ [0, π] zwischen OP und der z-Achse<br />
dargestellt werden. Der Winkel ϕ ist nur bis auf ein Vielfaches von 2π<br />
bestimmt. Als Standardbereich wird meist ϕ ∈ (−π, π] vereinbart.<br />
z-Achse<br />
P<br />
ϑ r<br />
O<br />
ϕ<br />
x-Achse<br />
y-Achse<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 1-1
Es gilt<br />
bzw.<br />
x = r cos ϕ sin ϑ, y = r sin ϕ sin ϑ, z = r cos ϑ<br />
r = √ x 2 + y 2 + z 2 , ϕ = arctan(y/x), ϑ = arccos(z/ √ x 2 + y 2 + z 2 ) ,<br />
wobei je nach Vorzeichen von x, y und z ein geeigneter Zweig des<br />
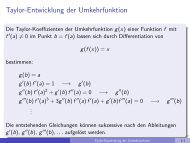
Arcustangens zu wählen ist. Mit dem Hauptzweig-Winkel<br />
ϕ H = arctan(y/x) ∈ (−π/2, π/2) gilt<br />
⎧<br />
ϕ H , für x > 0,<br />
⎪⎨<br />
sign(y)π/2, für x = 0,<br />
ϕ =<br />
ϕ H + π, für x < 0 ∧ y ≥ 0,<br />
⎪⎩<br />
ϕ H − π, für x < 0 ∧ y < 0.<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 1-2
Beispiel:<br />
regelmäßiges Tetraeder mit Kantenlänge 2 √ 2 und Schwerpunkt O<br />
P 1 = (1, 1, 1), P 2 = (1, −1, −1), P 3 = (−1, 1, −1), P 4 = (−1, −1, 1)<br />
z<br />
P 4<br />
P 1<br />
O<br />
y<br />
x<br />
P 2<br />
P 3<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 2-1
Eckpunkte in Kugelkoordinaten (r, ϑ, ϕ)<br />
P 1 = (1, 1, 1) → P ′ 1 = (√ 3, ψ, π/4)<br />
P 2 = (1, −1, −1) → P ′ 2 = (√ 3, π − ψ, −π/4)<br />
P 3 = (−1, 1, −1) → P ′ 3 = (√ 3, π − ψ, 3π/4)<br />
P 4 = (−1, −1, 1) → P ′ 4 = (√ 3, ψ, −3π/4)<br />
ψ = arccos(z/r) = arccos(1/ √ 3)<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 2-2
Beispiel:<br />
Längen- und Breitengrade auf der Erdkugel:<br />
Kugelkoordinaten mit anderen Winkelbereichen<br />
N<br />
Stuttgart<br />
r<br />
ϑ<br />
ϕ<br />
y<br />
x<br />
S<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 3-1
N<br />
Stuttgart<br />
r<br />
ϑ<br />
ϕ<br />
y<br />
x<br />
S<br />
östliche Länge 0 ◦ – 180 ◦ ϕ = 0 . . . π<br />
westliche Länge 0 ◦ – 180 ◦ ϕ = 0 . . . −π<br />
nördliche Breite 0 ◦ – 90 ◦ ϑ = π/2 . . . 0<br />
südliche Breite 0 ◦ – 90 ◦ ϑ = π/2 . . . π<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 3-2
N<br />
ϑ<br />
Stuttgart<br />
r<br />
ϕ<br />
y<br />
x<br />
S<br />
Äquator (Breite 0 ◦ ) und nullter Längenkreis fett<br />
Nordpol: 90 ◦ n. Br., Südpol: 90 ◦ s. Br.<br />
Längen- und Breitenkreise für Stuttgart (blau): 9 ◦ ö. L., 49 ◦ n. Br.<br />
ϕ = 1<br />
19<br />
20π (östliche Halbkugel) oder ϕ = −<br />
20π (westliche Halbkugel)<br />
ϑ = 90−49<br />
180 π = 41<br />
180 π<br />
<strong>Vektorrechnung</strong> – Koordinaten Kugelkoordinaten 3-3
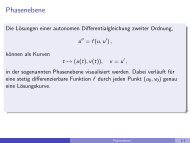
Zylinderkoordinaten<br />
Ein Punkt P = (x, y, z) kann durch den Winkel ϕ zwischen der x-Achse<br />
und der Projektion von OP auf die xy-Ebene, die Länge ϱ der Projektion<br />
und die z-Koordinate dargestellt werden. Der Winkel ϕ ist nur bis auf ein<br />
Vielfaches von 2π bestimmt. Als Standardbereich wird meist ϕ ∈ (−π, π]<br />
vereinbart.<br />
z-Achse<br />
P<br />
O<br />
z<br />
ϕ̺<br />
x-Achse<br />
y-Achse<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 1-1
Es gilt<br />
bzw.<br />
x = ϱ cos ϕ, y = ϱ sin ϕ, z = z<br />
ϱ = √ x 2 + y 2 , ϕ = arctan(y/x), z = z ,<br />
wobei je nach Vorzeichen von x und y ein geeigneter Zweig des<br />
Arcustangens zu wählen ist. Mit dem Hauptzweig-Winkel<br />
ϕ H = arctan(y/x) ∈ (−π/2, π/2) gilt<br />
⎧<br />
ϕ H , für x > 0,<br />
⎪⎨<br />
sign(y)π/2, für x = 0,<br />
ϕ =<br />
ϕ H + π, für x < 0 ∧ y ≥ 0,<br />
⎪⎩<br />
ϕ H − π, für x < 0 ∧ y < 0.<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 1-2
Beispiel:<br />
Zylinder- und Kugelkoordinaten, (ϱ, ϕ, z) bzw. (r, ϑ, ϕ),<br />
von (x, y, z) = (−1, √ 3, 2)<br />
z<br />
2<br />
P<br />
ϑ<br />
−1<br />
x<br />
ϕ<br />
√<br />
3<br />
y<br />
Q<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 2-1
Abstände vom Ursprung:<br />
ϱ = √ x 2 + y 2 = √ 1 + 3 = 2, r = √ x 2 + y 2 + z 2 = √ 1 + 3 + 4 = 2 √ 2<br />
z<br />
2<br />
P<br />
ϑ<br />
−1<br />
x<br />
ϕ<br />
√<br />
3<br />
y<br />
Q<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 2-2
z<br />
2<br />
P<br />
ϑ<br />
−1<br />
x<br />
Winkel mit der x-Achse:<br />
ϕ<br />
√<br />
3<br />
y<br />
Q<br />
ϕ = arctan(y/x) + π = arctan(− √ 3) + π = − π 3 + π = 2 3 π<br />
wegen x < 0 und y > 0<br />
Winkel mit der z-Achse:<br />
ϑ = arccos(z/r) = arccos(1/ √ 2) = π 4<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 2-3
alternativ:<br />
(x, 0, 0), O, Q bilden die Hälfte eines gleichseitigen Dreiecks;<br />
(0, 0, z), O, P bilden ein gleichschenkliges, rechtwinkliges Dreieck<br />
z<br />
2<br />
P<br />
ϑ<br />
−1<br />
x<br />
ϕ<br />
√<br />
3<br />
y<br />
Q<br />
<strong>Vektorrechnung</strong> – Koordinaten Zylinderkoordinaten 2-4
Translation eines kartesischen Koordinatensystems<br />
Bei einer Verschiebung des Ursprungs O nach O ′ = (p 1 , p 2 , p 3 ) ändern<br />
sich bei gleichbleibender Richtung der Achsen die Koordinaten eines<br />
Punktes X = (x 1 , x 2 , x 3 ) gemäß<br />
X ′ = (x 1 − p 1 , x 2 − p 2 , x 3 − p 3 ) .<br />
x 2<br />
x ′ 2<br />
X ̂=X ′<br />
p 2<br />
O ′<br />
x ′ 1<br />
O p 1<br />
x 1<br />
<strong>Vektorrechnung</strong> – Koordinaten Translation 1-1
Beispiel:<br />
ebene gleichförmige Bewegung<br />
(x(t), y(t)) = (p + αt, q + βt), t ≥ 0 ,<br />
betrachtet aus einem in x-Richtung mit Geschwindigkeit v fahrenden Zug<br />
Änderung der Koordinaten:<br />
x ′ = x − vt,<br />
y ′ = y<br />
andere beobachtete Geschwindigkeit<br />
<strong>Vektorrechnung</strong> – Koordinaten Translation 2-1
Ý<br />
½Ø¼<br />
ؽ ؽ ؼ ½ÚØ<br />
Ü<br />
ؽݼ<br />
½Ø¼ ؼ ؽ ½<br />
ܼ<br />
transformierte Koordinaten eines Objekts, das sich in einer Zeiteinheit von<br />
P = (1, 1) nach Q = (4, 3) bewegt (roter Pfeil) für v = 2:<br />
P ′ = (1, 1), Q ′ = (4 − 2, 3 − 0) = (2, 3)<br />
tatsächliche und beobachtete Geschwindigkeit:<br />
√<br />
v t = (4 − 1) 2 + (3 − 1) 2 = √ 13, v b = √ 5<br />
<strong>Vektorrechnung</strong> – Koordinaten Translation 2-2
Rotation eines kartesischen Koordinatensystems<br />
Bei einer Drehung der xy-Ebene um die z-Achse mit dem Winkel α<br />
transformieren sich die Koordinaten eines Punktes P = (p 1 , p 2 , p 3 ) gemäß<br />
p ′ 1 = cos α p 1 + sin α p 2 , p ′ 2 = − sin α p 1 + cos α p 2 , p ′ 3 = p 3 .<br />
y<br />
y ′ 1<br />
p 2<br />
P<br />
x ′<br />
1<br />
p ′ 1<br />
p ′ 2<br />
α<br />
p 1<br />
x<br />
<strong>Vektorrechnung</strong> – Koordinaten Rotation 1-1
Analoge Formeln erhält man für Drehungen der yz- und zx-Ebene.<br />
<strong>Vektorrechnung</strong> – Koordinaten Rotation 1-2
Beweis:<br />
y<br />
∢(S, P, Q) = α =⇒<br />
△(S, O, R) ∼ △(S, P, Q)<br />
p 2<br />
S<br />
P<br />
Q<br />
x ′<br />
p ′ 1<br />
erstes Dreieck:<br />
zweites Dreieck:<br />
|OS| = p 1 / cos α,<br />
y ′ p 1<br />
p ′ 2<br />
O<br />
|RS| = p 1 tan α<br />
α<br />
R<br />
x<br />
p 2 ′ = cos α |PS| = cos α (p 2 − |RS|) = cos α p 2 − sin α p 1<br />
p 1 ′ = |OS| + |SQ| = p 1 / cos α + sin α (p 2 − |RS|)<br />
= 1 − sin2 α<br />
cos α p 1 + sin α p 2 = cos α p 1 + sin α p 2<br />
<strong>Vektorrechnung</strong> – Koordinaten Rotation 2-1
Beispiel:<br />
Bahnkurven von geradlinigen und kreisförmigen Bewegungen (links)<br />
G : (x, y) = (1, 2 + t/(2π)),<br />
K : (x, y) = (1 + cos(t), 2 − sin(t))<br />
beobachtet in einem mit Winkelgeschwindigkeit ω = 1 rotierenden<br />
ÖÖÔÐÑÒØ× Ý Ý¼<br />
Bezugssystem (rechts)<br />
¾<br />
½Ø Ü ¾<br />
½ ܼ<br />
<strong>Vektorrechnung</strong> – Koordinaten Rotation 3-1
Transformation<br />
x ′ = cx + sy,<br />
mit c = cos(ωt), s = sin(ωt)<br />
geradlinige Bewegung Spirale:<br />
x ′ = c + s(2 + t/(2π)),<br />
y ′ = −sx + cy<br />
y ′ = −s + c(2 + t/(2π))<br />
kreisförmige Bewegung:<br />
x ′ = c(1 + ˜c) + s(2 − ˜s),<br />
y ′ = −s(1 + ˜c) + c(2 − ˜s)<br />
(˜c = cos t, ˜s = sin t)<br />
abrupte Richtungsänderung möglich<br />
<strong>Vektorrechnung</strong> – Koordinaten Rotation 3-2
Vektoren im Raum<br />
Ein Vektor ist eine gerichtete Strecke:<br />
⃗a = −→ PQ<br />
bezeichnet den Vektor vom Punkt P zum Punkt Q. Alternativ kann ein<br />
Vektor als Parallel-Verschiebung des Raumes interpretiert und mit einem<br />
Pfeil identifiziert werden.<br />
−⃗a<br />
P 2<br />
P 1 ⃗a<br />
⃗a<br />
Q 2<br />
Q 1<br />
<strong>Vektorrechnung</strong> – Vektoren Vektoren im Raum 1-1
Wie aus der Abbildung ersichtlich ist, stellen gleichlange Pfeile mit gleicher<br />
Richtung den gleichen Vektor dar, −−−→ P 1 Q 1 = −−−→ P 2 Q 2 . Die spezielle Darstellung<br />
bezogen auf den Ursprung des Koordinatensystems wird als Ortsvektor<br />
bezeichnet und definiert die Koordinaten des Vektors:<br />
⎛ ⎞<br />
a<br />
−→ 1<br />
OA = ⎝ a 2<br />
⎠ .<br />
a 3<br />
Die Koordinaten von ⃗a lassen sich ebenfalls als Differenz der Koordinaten<br />
der Punkte Q und P berechnen. Schließlich wird mit<br />
der Nullvektor bezeichnet.<br />
−→<br />
OO = −→ PP = ⃗0<br />
<strong>Vektorrechnung</strong> – Vektoren Vektoren im Raum 1-2
Addition von Vektoren<br />
Die Summe von zwei Vektoren entspricht der Hintereinanderschaltung<br />
zweier Verschiebungen,<br />
−→<br />
PR = −→ PQ + −→ QR .<br />
Q<br />
⃗a<br />
⃗ b<br />
P<br />
⃗c<br />
R<br />
<strong>Vektorrechnung</strong> – Vektoren Addition von Vektoren 1-1
Für die Koordinaten gilt entsprechend<br />
⎛ ⎞ ⎛<br />
⃗c = ⃗a + ⃗ a 1<br />
b = ⎝ a 2<br />
⎠ + ⎝<br />
a 3<br />
⎞ ⎛<br />
b 1<br />
b 2<br />
⎠ = ⎝<br />
b 3<br />
⎞<br />
a 1 + b 1<br />
a 2 + b 2<br />
⎠ .<br />
a 3 + b 3<br />
Mit<br />
−→<br />
QP = − −→ PQ<br />
wird die zu ⃗a = −→ PQ entgegengesetzte Verschiebung −⃗a bezeichnet.<br />
Insbesondere gilt<br />
⃗a + (−⃗a) = ⃗0, ⃗a + ⃗0 = ⃗a .<br />
<strong>Vektorrechnung</strong> – Vektoren Addition von Vektoren 1-2
Beispiel:<br />
berechne<br />
−→<br />
PR = −→ PQ + −→ QR,<br />
ÈËÖÖÔÐÑÒØ× È<br />
É<br />
−→<br />
RP = −→ RQ + −→ QP = − −→ (<br />
PQ + − −→ )<br />
QR<br />
<br />
Ê<br />
<br />
<strong>Vektorrechnung</strong> – Vektoren Addition von Vektoren 2-1
Koordinaten:<br />
P = (1, 1, 1), Q = (4, 2, 7), R = (1, 4, 3)<br />
⃗a = −→ PQ, ⃗ b = −→ QR, ⃗c = −→ PR<br />
⃗c = ⃗a + ⃗ b =<br />
=<br />
− ⃗ b + (−⃗a) =<br />
=<br />
⎛<br />
⎝<br />
⎛<br />
⎝<br />
⎛<br />
⎝<br />
⎛<br />
⎝<br />
4 − 1<br />
2 − 1<br />
7 − 1<br />
3<br />
1<br />
6<br />
⎞<br />
⎞<br />
⎠ + ⎝<br />
4 − 1<br />
2 − 4<br />
7 − 3<br />
0<br />
−3<br />
−2<br />
⎞<br />
⎛<br />
⎠ + ⎝<br />
⎛<br />
⎞<br />
−3<br />
2<br />
−4<br />
⎛<br />
⎠ + ⎝<br />
⎠ = −⃗c<br />
1 − 4<br />
4 − 2<br />
3 − 7<br />
⎞<br />
⎛<br />
⎞<br />
⎠<br />
⎠ = ⎝<br />
1 − 4<br />
1 − 2<br />
1 − 7<br />
⎞<br />
0<br />
3<br />
2<br />
⎞<br />
⎠<br />
⎛<br />
⎠ = ⎝<br />
3<br />
−2<br />
4<br />
⎞<br />
⎛<br />
⎠ + ⎝<br />
−3<br />
−1<br />
−6<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Vektoren Addition von Vektoren 2-2
Beispiel:<br />
Zerlegung der Gewichtskraft ⃗ f G für eine schiefe Ebene mit Hilfe des<br />
Kräfteparallelogramms:<br />
⃗ fG =<br />
⃗ fN<br />
}{{}<br />
+ ⃗ fH<br />
}{{}<br />
Normalkraft Hangabtriebskraft<br />
⃗f H<br />
⃗f N<br />
⃗f G<br />
<strong>Vektorrechnung</strong> – Vektoren Addition von Vektoren 3-1
Skalarmultiplikation<br />
Der Vektor s⃗a entspricht einer s-fachen Verschiebung, d.h.<br />
⎛ ⎞ ⎛ ⎞<br />
a 1 sa 1<br />
s ⎝ a 2<br />
⎠ = ⎝ sa 2<br />
⎠ .<br />
a 3 sa 3<br />
Speziell ist 0⃗a = ⃗0.<br />
sa 2<br />
a 2<br />
s⃗a<br />
⃗a<br />
a 1 sa 1<br />
<strong>Vektorrechnung</strong> – Vektoren Skalarmultiplikation 1-1
Beispiel:<br />
Schnittpunkt S (Schwerpunkt) der Seitenhalbierenden in einem Dreieck:<br />
C<br />
⃗s = 1 3<br />
(<br />
⃗a + ⃗ )<br />
b + ⃗c<br />
M b<br />
S<br />
M a<br />
Darstellung der Punkte auf der Seitenhalbierenden AM a :<br />
( 1<br />
⃗p = ⃗a + t(⃗m a − ⃗a) = ⃗a + t<br />
2 ⃗ b + 1 )<br />
2 ⃗c − ⃗a , t ∈ [0, 1]<br />
A<br />
M c<br />
B<br />
t = 2/3 =⇒ ⃗p = ⃗s =⇒ S teilt AM a im Verhältnis 2 : 1<br />
analoges Argument für BM b und CM c<br />
S gemeinsamer Punkt der 3 Seitenhalbierenden<br />
<strong>Vektorrechnung</strong> – Vektoren Skalarmultiplikation 2-1
Betrag eines Vektors im Raum<br />
Der Betrag von ⃗a = −→ PQ ist die Länge des Pfeils von P nach Q bzw. von O<br />
nach A, d.h.,<br />
√<br />
|⃗a| = a1 2 + a2 2 + a2 3 .<br />
Insbesondere ist |s⃗a| = |s||⃗a|.<br />
Ein Vektor mit Betrag 1 wird als Einheitsvektor bezeichnet. Man benutzt<br />
die Schreibweise<br />
⃗v 0 = ⃗v/|⃗v|<br />
für einen normierten Vektor.<br />
<strong>Vektorrechnung</strong> – Vektoren Betrag 1-1
Beispiel:<br />
Betrag:<br />
normierter Vektor:<br />
⃗a 0 = ⎝<br />
⎛<br />
⃗a = ⎝<br />
4<br />
−1<br />
8<br />
⎞<br />
⎠<br />
|⃗a| = √ 16 + 1 + 64 = 9<br />
⎛<br />
4<br />
−1<br />
8<br />
⎞<br />
⎛<br />
⎠ /9 = ⎝<br />
4/9<br />
−1/9<br />
8/9<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Vektoren Betrag 2-1
Dreiecksungleichung<br />
Für eine Summe zweier Vektoren gilt<br />
|⃗a + ⃗ b| ≤ |⃗a| + | ⃗ b|<br />
mit Gleichheit genau dann, wenn ⃗a und ⃗ b parallel sind, d.h. ⃗a = s ⃗ b.<br />
⃗a<br />
⃗ b<br />
⃗a + ⃗ b<br />
<strong>Vektorrechnung</strong> – Vektoren Dreiecksungleichung 1-1
Rechenregeln für Vektoren<br />
Für Vektoren gelten die folgenden Rechenregeln.<br />
Kommutativgesetz:<br />
⃗a + ⃗ b = ⃗ b + ⃗a<br />
Assoziativgesetz:<br />
⃗a + ( ⃗ b + ⃗c) = (⃗a + ⃗ b) + ⃗c<br />
Distributivgesetz:<br />
s(⃗a + ⃗ b) = s⃗a + s ⃗ b<br />
<strong>Vektorrechnung</strong> – Vektoren Rechenregeln 1-1
ÖÖÔÐÑÒØ× Beispiel:<br />
Ç<br />
Flug nach Osten mit 800km/h,<br />
Ü Ü·Ý<br />
Windgeschwindigkeit<br />
ÔÝ<br />
50km/h<br />
Ü·Ô <br />
aus WSW<br />
Geschwindigkeitsvektor des Flugzeugs:<br />
( 800<br />
⃗x =<br />
0<br />
)<br />
Wind:<br />
⃗y =<br />
( 50 cos(π/8)<br />
50 sin(π/8)<br />
)<br />
<strong>Vektorrechnung</strong> – Vektoren Rechenregeln 2-1
Position nach einer Stunde:<br />
( 800 + 50 cos(π/8)<br />
⃗x + ⃗y =<br />
50 sin(π/8)<br />
)<br />
≈<br />
( 846.19<br />
19.13<br />
)<br />
⃗p: orthogonale Projektion von ⃗y auf die Gerade in Richtung von ⃗x<br />
Geschwindigkeitskomponente nach Osten:<br />
( ) ( )<br />
800 + 50 cos(π/8) 846.19<br />
⃗x + ⃗p =<br />
≈<br />
0<br />
0<br />
Drift nach Norden:<br />
⃗ d = ⃗x + ⃗y − (⃗x + ⃗p) =<br />
(<br />
Gesamtgeschwindigkeit ⃗x + ⃗p + ⃗ d<br />
0<br />
50 sin(π/8)<br />
)<br />
≈<br />
( 0<br />
19.13<br />
)<br />
<strong>Vektorrechnung</strong> – Vektoren Rechenregeln 2-2
Winkel zwischen zwei Vektoren<br />
Für ⃗a, ⃗ b ≠ ⃗0 bezeichnet man mit<br />
∢(⃗a, ⃗ b) ∈ [0, π]<br />
den kleineren der beiden Winkel, den die mit den Vektoren assoziierten<br />
Pfeile in einem gemeinsamen Scheitelpunkt bilden.<br />
⃗a<br />
∢(⃗a, ⃗ b)<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Winkel 1-1<br />
⃗ b
Die beiden Vektoren sind orthogonal, ⃗a ⊥ ⃗ b, wenn der Winkel gleich π/2<br />
ist. Dabei vereinbart man, dass der Nullvektor auf jedem Vektor senkrecht<br />
steht.<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Winkel 1-2
Beispiel:<br />
Winkel zwischen Vektoren<br />
ÖÔÐÑÒØ× <br />
´µ¼<br />
ÈËÖÖÔÐÑÒØ× <br />
´µ<br />
⃗a<br />
⃗ b<br />
∢(⃗a, ⃗ b) = π 2<br />
ÈËÖÖÔÐÑÒØ× <br />
´µ<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Winkel 2-1
Kosinussatz<br />
In einem Dreieck gilt für den der Seite AB gegenüberliegenden Winkel γ<br />
c 2 = a 2 + b 2 − 2ab cos γ .<br />
B<br />
a<br />
c<br />
γ<br />
b<br />
A<br />
Als Spezialfall erhält man für γ = π/2 den Satz des Pythagoras:<br />
c 2 = a 2 + b 2 .<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Kosinussatz 1-1
Beweis:<br />
a<br />
h<br />
c<br />
γ<br />
p<br />
q<br />
b<br />
Satz des Pythagoras =⇒<br />
mit q = b − p, p = a cos γ<br />
Einsetzen <br />
c 2 = h 2 + q 2 , h 2 = a 2 − p 2<br />
c 2 = (a 2 − p 2 ) + (b − p) 2<br />
= a 2 − p 2 + b 2 − 2b(a cos γ) + p 2<br />
= a 2 + b 2 − 2ab cos γ<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Kosinussatz 2-1
Sinussatz<br />
In einem Dreieck<br />
C<br />
γ<br />
b<br />
a<br />
A<br />
α<br />
c<br />
β<br />
B<br />
verhalten sich die Längen der Seiten wie die Sinuswerte der<br />
gegenüberliegenden Winkel:<br />
sin α<br />
a<br />
= sin β<br />
b<br />
= sin γ<br />
c<br />
oder sin α : sin β : sin γ = a : b : c .<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Sinussatz 1-1
•<br />
Beweis:<br />
bilde durch Höhe begrenzte rechtwinklige Dreiecke<br />
b<br />
h<br />
a<br />
α<br />
β<br />
=⇒<br />
sin α = h b ,<br />
sin β = h a<br />
sin α : sin β = h b : h a = a : b<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Sinussatz 2-1
Beispiel:<br />
Entfernung d zweier schwer zugänglicher Punkte P und Q<br />
A<br />
P<br />
Q<br />
α<br />
a<br />
b<br />
30 ◦ 45 ◦<br />
30 ◦<br />
c = 100<br />
B<br />
Sinussatz =⇒ b : 100 = sin 135 ◦ : sin 15 ◦ , d.h.<br />
d<br />
∠(A, B, P) = 90 ◦ <br />
a = 100/ sin 30 ◦ = 200<br />
Winkelsumme gleich 180 ◦ <br />
α = 15 ◦<br />
b = 273.2<br />
Kosinussatz =⇒ d 2 = a 2 + b 2 − 2ab cos 30 ◦ , d.h.<br />
d = (40000 + 74640 − 2 · 54640 · 0.8660) 1/2 = 141.4<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Sinussatz 3-1
Skalarprodukt von Vektoren im Raum<br />
Das Skalarprodukt zweier Vektoren ist durch<br />
⃗a · ⃗b = |⃗a|| ⃗ b| cos ∢(⃗a, ⃗ b) = a 1 b 1 + a 2 b 2 + a 3 b 3<br />
definiert. Insbesondere ist<br />
⃗a · ⃗a = |⃗a| 2<br />
und<br />
⃗a · ⃗b = 0 ⇔ ⃗a ⊥ ⃗ b .<br />
Aus der Koordinatendarstellung des Skalarproduktes folgt<br />
⃗a · ⃗b = ⃗ b · ⃗a<br />
sowie (<br />
s⃗a + r ⃗ )<br />
b · ⃗c = s⃗a · ⃗c + r ⃗ b · ⃗c ,<br />
d.h. es gelten die für Produkte üblichen Rechenregeln.<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Skalarprodukt 1-1
Beweis:<br />
ÈËÖÖÔÐÑÒØ×<br />
Kosinussatz:<br />
|⃗c| 2 = |⃗a| 2 + | ⃗ b| 2 − 2|⃗a|| ⃗ b| cos γ<br />
<br />
<br />
<br />
<br />
Umformung <br />
2|⃗a|| ⃗ b| cos γ = (a 2 1 + a 2 2 + a 2 3) + (b 2 1 + b 2 2 + b 2 3) − (c 2 1 + c 2 2 + c 2 3 )<br />
substituiere c 2 i<br />
= (b i − a i ) 2<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Skalarprodukt 2-1
Beispiel:<br />
Dreieck mit A = (6, 0), B = (4, 4), C = (0, 0)<br />
⃗a = −→ ( )<br />
( )<br />
4<br />
CB = , ⃗<br />
−→ 6 b = CA = , ⃗c = −→ ( 2<br />
BA =<br />
4<br />
0<br />
−4<br />
)<br />
B<br />
⃗a<br />
⃗c<br />
C<br />
γ<br />
⃗ b<br />
A<br />
Winkelberechnung mit Hilfe des Skalarproduktes:<br />
( ) ( )<br />
4 6<br />
·<br />
4 0<br />
cos γ =<br />
)∣ ∣( )∣ = ∣ 4 ∣∣∣ ∣∣∣ 6<br />
∣( ∣∣∣ 6 √ 32 = √ 1<br />
2<br />
4 0<br />
=⇒ γ = π/4<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Skalarprodukt 3-1
prüfe Kosinussatz für △(A, B, C):<br />
|⃗c| 2 − |⃗a| 2 − | ⃗ b| 2 = 20 − 32 − 36 = −48<br />
⃗a = (4, 4) t , ⃗ b = (6, 0) t , ⃗c = (2, −4) t<br />
−2|⃗a|| ⃗ b| cos γ = −2 (4 √ 2) 6/ √ 2<br />
γ = π/4<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Skalarprodukt 3-2
Orthogonalbasis im Raum<br />
Eine Orthogonalbasis im Raum besteht aus drei paarweise orthogonalen<br />
Vektoren ⃗u, ⃗v, ⃗w, jeweils ungleich ⃗0.<br />
⃗a w<br />
⃗w<br />
⃗a<br />
⃗a u<br />
⃗v<br />
⃗a v<br />
⃗u<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 1-1
Wie in der Abbildung illustriert ist, lässt sich jeder Vektor ⃗a als<br />
Linearkombination<br />
⃗a · ⃗u ⃗a · ⃗v ⃗a · ⃗w<br />
⃗a = ⃗u + ⃗v +<br />
2 2<br />
|⃗u| |⃗v| |⃗w| 2 ⃗w<br />
darstellen. Die Summanden sind die Projektionen ⃗a u , ⃗a v , ⃗a w , auf die durch<br />
die Basisvektoren erzeugten Achsen, und für die Koeffizienten gilt<br />
|⃗a · ⃗u| 2<br />
|⃗u| 2<br />
+<br />
|⃗a · ⃗v|2<br />
|⃗v| 2<br />
+<br />
|⃗a · ⃗w|2<br />
|⃗w| 2 = |⃗a| 2 .<br />
Sind die Vektoren ⃗u, ⃗v, ⃗w normiert (|⃗u| = |⃗v| = |⃗w| = 1), so spricht man<br />
von einer Orthonormalbasis.<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 1-2
Speziell ist<br />
⎛<br />
⎝<br />
⎞<br />
a 1<br />
a 2<br />
⎠ = a 1 ⃗e x + a 2 ⃗e y + a 3 ⃗e z<br />
a 3<br />
für die kanonische Orthonormalbasis<br />
⎛ ⎞ ⎛<br />
1<br />
⃗e x = ⎝ 0 ⎠ , ⃗e y = ⎝<br />
0<br />
des kartesisches Koordinatensystems.<br />
0<br />
1<br />
0<br />
⎞<br />
⎛<br />
⎠ , ⃗e z = ⎝<br />
0<br />
0<br />
1<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 1-3
Beweis:<br />
bilde Skalarprodukt von<br />
mit den Basisvektoren<br />
⃗u · ⃗u = |⃗u| 2 , ⃗v · ⃗u = ⃗w · ⃗u = 0 =⇒<br />
=⇒ α = ⃗a · ⃗u/|⃗u| 2<br />
analoge Berechnung von β und γ<br />
⃗a = α⃗u + β⃗v + γ⃗w<br />
⃗a · ⃗u = (α⃗u + β⃗v + γ⃗w) · ⃗u = α|⃗u| 2<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 2-1
Formel für die Quadratsumme:<br />
Ausmultiplizieren <br />
|⃗a| 2 = (α⃗u + β⃗v + γ⃗w) · (α⃗u + β⃗v + γ⃗w)<br />
|⃗a| 2 = α 2 |⃗u| 2 + β 2 |⃗v| 2 + γ 2 |⃗w| 2<br />
wegen Orthogonalität der Basisvektoren<br />
Differenzvektoren zu den Projektionen:<br />
⃗a − α⃗u, ⃗a − β⃗v, ⃗a − γ⃗w<br />
senkrecht auf den entsprechenden Basisvektoren, z.B.<br />
(⃗a − α⃗u) · ⃗u = (β⃗v + γ⃗w) · ⃗u = 0<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 2-2
Beispiel:<br />
Bzgl. der orthogonalen Basis<br />
besitzt der Vektor<br />
die Koeffizienten<br />
⃗u = (1, 1, 0) t , ⃗v = (1, −1, 1) t , ⃗w = (−1, 1, 2) t<br />
α =<br />
β =<br />
γ =<br />
⃗a = (1, 2, 4) t = ⃗e x + 2⃗e y + 4⃗e z<br />
⎛<br />
⃗a · ⃗u<br />
|⃗u| 2 = 1 ⎝<br />
2<br />
⎛<br />
⃗a · ⃗v<br />
|⃗v| 2 = 1 3<br />
⃗a · ⃗w<br />
|⃗w| 2 = 1 6<br />
⎝<br />
⎛<br />
⎝<br />
1<br />
2<br />
4<br />
1<br />
2<br />
4<br />
1<br />
2<br />
4<br />
⎞<br />
⎛<br />
⎠ · ⎝<br />
⎞<br />
⎛<br />
⎠ · ⎝<br />
⎞<br />
⎛<br />
⎠ · ⎝<br />
1<br />
1<br />
0<br />
⎞<br />
1<br />
−1<br />
1<br />
−1<br />
1<br />
2<br />
⎠ = 3 2<br />
⎞<br />
⎠ = 1<br />
⎞<br />
⎠ = 3 2<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 3-1
Basisdarstellung<br />
⎛<br />
⃗a = 3 2 · ⎝<br />
=<br />
Quadrat des Betrags:<br />
⎛<br />
⎝<br />
1<br />
2<br />
4<br />
1<br />
1<br />
0<br />
⎞<br />
⎠<br />
⎞<br />
Quadratsumme der Koeffizienten:<br />
⎛<br />
⎠ + ⎝<br />
1<br />
−1<br />
1<br />
⎞<br />
⎛<br />
⎠ + 3 ⎝<br />
2<br />
|⃗a| 2 = 1 + 4 + 16 = 21<br />
−1<br />
1<br />
2<br />
⎞<br />
⎠<br />
α 2 |⃗u| 2 + β 2 |⃗v| 2 + γ 2 |⃗w| 2 = 9 4 · 2 + 1 · 3 + 9 4 · 6 = 21<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Orthogonalbasis 3-2
Satz des Pythagoras<br />
Für orthogonale Vektoren ⃗u und ⃗v gilt<br />
|⃗u + ⃗v| 2 = |⃗u| 2 + |⃗v| 2 .<br />
Der Satz ist heute als Satz des Pythagoras (569-475 v. Chr.) bekannt,<br />
obwohl ihn bereits die Babylonier 1000 Jahre früher kannten.<br />
Möglicherweise war aber Pythagoras der erste, der ihn bewiesen hat.<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Satz des Pythagoras 1-1
Beweis:<br />
Linearität des Skalarprodukts =⇒<br />
|⃗u + ⃗v| 2 = 〈⃗u + ⃗v,⃗u + ⃗v〉<br />
= 〈⃗u,⃗u〉 + 〈⃗u,⃗v〉 + 〈⃗v,⃗u〉 +〈⃗v,⃗v〉<br />
} {{ }<br />
=0, da ⃗u⊥⃗v<br />
= |⃗u| 2 + |⃗v| 2<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Satz des Pythagoras 2-1
Beispiel:<br />
Pythagoräisches Tripel:<br />
l, m, n ∈ N : l 2 + m 2 = n 2 ,<br />
d.h. ganzzahlige Seitenlängen für rechtwinklige Dreiecke.<br />
Anwendung durch Ägypter: Konstruktion rechter Winkel via Ergänzung<br />
ungerader Zahlen l durch m = (l 2 − 1)/2 und n = (l 2 + 1)/2 zu einem<br />
Pythagoräischen Tripel:<br />
l 2 + l4 − 2l 2 + 1<br />
4<br />
= l4 + 2l 2 + 1<br />
4<br />
( l 2 + 1<br />
=<br />
2<br />
) 2<br />
Multiplikation der Tripel mit 2 Tripel für jede gerade Zahl l ≥ 6.<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Satz des Pythagoras 3-1
allgemeineres Konstruktionsprinzip mit Hilfe der dritten Binomischen<br />
Formel<br />
c 2 − b 2 = (c − b)(c + b) = a 2<br />
ganzzahlige Lösung, wenn a 2 in zwei unterschiedliche Faktoren<br />
zerlegbar ist, die eine gerade Differenz (= 2b) aufweisen<br />
Für a = l ungerade ist dies für die Aufteilung a 2 = a 2 · 1 mit<br />
(obiger Spezialfall)<br />
b = a2 − 1<br />
2<br />
, c = a2 + 1<br />
2<br />
<strong>Vektorrechnung</strong> – Skalarprodukt Satz des Pythagoras 3-2
Vektorprodukt<br />
Der Vektor<br />
⃗c = ⃗a × ⃗ b<br />
ist zu ⃗a und ⃗ b orthogonal, gemäß der ”<br />
Rechten-Hand-Regel“ orientiert und<br />
hat die Länge ∣ ∣ ⃗c ∣ ∣ = ∣ ∣⃗a ∣ ∣ ∣ ∣⃗ b<br />
∣ ∣ sin(∢(⃗a, ⃗ b)) ,<br />
die dem Flächeninhalt des von den Vektoren ⃗a und ⃗ b aufgespannten<br />
Parallelogramms entspricht.<br />
Mittelfinger<br />
⃗c<br />
⃗a<br />
∢(⃗a, ⃗ b)<br />
⃗ b<br />
Zeigefinger<br />
Daumen<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 1-1
Insbesondere gilt<br />
⃗a × ⃗ b = ⃗0 für ⃗a‖ ⃗ b;<br />
∣<br />
∣⃗a × ⃗ b ∣ ∣ = ∣ ∣⃗a ∣ ∣ ∣ ∣⃗ b<br />
∣ ∣ für ⃗a⊥ ⃗ b.<br />
Alternativ lässt sich das Vektorprodukt durch<br />
⎛<br />
⎞<br />
⃗a × ⃗ a 2 b 3 − a 3 b 2<br />
b = ⎝ a 3 b 1 − a 1 b 3<br />
⎠<br />
a 1 b 2 − a 2 b 1<br />
definieren.<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 1-2
Beweis:<br />
(i) Linearität der geometrischen Definition:<br />
Multiplikation mit Skalaren ̌<br />
Invarianz unter Drehungen ⃗a = ⃗e z<br />
additiv, da<br />
⃗c = ⃗e z × (b 1 , b 2 , b 3 ) t = (−b 2 , b 1 , 0) t<br />
Begründung:<br />
⃗c ⊥ ⃗e z , ⃗ b<br />
b 3 irrelevant für Flächeninhalt (Scherung) O.E. b 3 = 0<br />
∡(⃗e z , ⃗ b) = π/2, |⃗e z | = 1 |⃗c|̌<br />
richtige Orientierung (prüfe alle Vorzeichenkombinationen mit<br />
” rechter Hand Regel ” )<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 2-1
(ii) Übereinstimmung mit analytischer Definition:<br />
bereits gezeigt für ⃗a = ⃗e z , ⃗e x , ⃗e y analog<br />
Antisymmetrie und Linearität allgemeiner Fall<br />
(iii) Flächeninhalt A des Parallelogramms:<br />
A = | ⃗ b| h mit<br />
h = |⃗a| sin ∢(⃗a, ⃗ b)<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 2-2
Beispiel:<br />
Vektorprodukt ⃗c der Vektoren<br />
⃗c ⊥ ⃗a, ⃗ b <br />
⃗a = (2, 1, 2) t ,<br />
Rechte-Hand-Regel =⇒ λ > 0<br />
Winkel:<br />
cos ∢(⃗a, ⃗ b) =<br />
⃗ b = (3, 3, 0)<br />
t<br />
⃗c = λ(−1, 1, 1/2) t<br />
=⇒ ∢(⃗a, ⃗ b) = π/4<br />
Fläche des aufgespannten Parallelogramms:<br />
⃗a · ⃗b<br />
|⃗a| | ⃗ b| = 9<br />
3 · 3 √ 2 = 1 √<br />
2<br />
|⃗c| = |⃗a| | ⃗ b| sin ∢(⃗a, ⃗ b) = 3 · 3 √ 2 ·<br />
1<br />
√<br />
2<br />
= 9<br />
<br />
⃗c = λ(−1, 1, 1/2) t = (−6, 6, 3) t<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 3-1
analytische Definition <br />
⎛ ⎞ ⎛<br />
2<br />
⃗c = ⎝ 1 ⎠ × ⎝<br />
2<br />
3<br />
3<br />
0<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
1 · 0 − 2 · 3<br />
2 · 3 − 2 · 0<br />
2 · 3 − 1 · 3<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
−6<br />
6<br />
3<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 3-2
Beispiel:<br />
Vektorprodukte der kanonischen Basisvektoren:<br />
⃗e x × ⃗e y = ⃗e z , ⃗e y × ⃗e z = ⃗e x , ⃗e z × ⃗e x = ⃗e y<br />
⃗e x × ⃗e x = ⃗0, ⃗e y × ⃗e y = ⃗0, ⃗e z × ⃗e z = ⃗0<br />
entsprechende Formeln für eine beliebige, gemäß der Rechten-Hand-Regel<br />
orientierte Orthonormalbasis<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 4-1
Beispiel:<br />
Lorentzkraft für Elektron mit Ladung −e und Geschwindigkeit ⃗v in einem<br />
Magnetfeld ⃗ b:<br />
⃗ f = e ⃗ b × ⃗v<br />
Auslenkung des stromdurchflossenen Leiters in Richtung ⃗ f<br />
−<br />
+<br />
⃗v<br />
⃗ f<br />
⃗ b<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 5-1
Regeln für Vektorprodukte<br />
Für Vektorprodukte gelten die folgenden Rechenregeln:<br />
Antisymmetrie<br />
⃗a × ⃗ b = − ( ⃗ b × ⃗a<br />
)<br />
Linearität<br />
(<br />
α1 ⃗a 1 + α 2 ⃗a 2<br />
)<br />
×<br />
(<br />
β1 ⃗ b1 + β 2<br />
⃗ b2<br />
)<br />
=<br />
α 1 β 1<br />
( ⃗a1 × ⃗ b 1<br />
)<br />
+ α1 β 2<br />
( ⃗a1 × ⃗ b 2<br />
)<br />
+ α2 β 1<br />
( ⃗a2 × ⃗ b 1<br />
)<br />
+ α2 β 2<br />
( ⃗a2 × ⃗ b 2<br />
)<br />
Grassmann-Identität<br />
Lagrange-Identität<br />
(⃗a × ⃗ b) × ⃗c = (⃗a · ⃗c) ⃗ b − ( ⃗ b · ⃗c)⃗a<br />
(⃗a × ⃗ b) · (⃗c × ⃗ d) = (⃗a · ⃗c)( ⃗ b · ⃗d) − (⃗a · ⃗d)( ⃗ b · ⃗c)<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 6-1
Beweis:<br />
Antisymmetrie und Linearität ̌<br />
Grassmann- und Lagrange-Identität:<br />
Linearität o.B.d.A. ⃗a, ⃗ b kanonische Basisvektoren<br />
⃗a = ⃗e x = ⃗ b: beide Seiten der Identitäten Null<br />
⃗a = ⃗e x , ⃗ b = ⃗e y :<br />
linke Seite der Grassmann-Identität<br />
⎛<br />
(⃗e x × ⃗e y ) × ⃗c = ⎝<br />
0<br />
0<br />
1<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
⎞ ⎛<br />
c 1<br />
c 2<br />
⎠ = ⎝<br />
c 3<br />
−c 2<br />
c 1<br />
0<br />
Übereinstimmung mit rechter Seite c 1 ⃗e y − c 2 ⃗e x<br />
Lagrange-Identität im betrachteten Spezialfall<br />
⎛ ⎞ ⎛<br />
⎞<br />
0<br />
· · ·<br />
⎝ 0 ⎠ · ⎝ · · · ⎠ = c 1 d 2 − d 1 c 2<br />
1 c 1 d 2 − c 2 d 1<br />
analoge Argumentation für andere Vektorkombinationen<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 7-1<br />
⎞<br />
⎠
Beispiel:<br />
Linearität vorteilhaft bei parallelen Vektoren:<br />
⎛ ⎛ ⎞ ⎛ ⎞⎞<br />
⎛⎛<br />
0 1<br />
0<br />
⎝3 ⎝ 0 ⎠ + ⎝ 2 ⎠⎠ × ⎝⎝<br />
0<br />
1 0<br />
1<br />
⎛<br />
= 6 ⎝<br />
⎛<br />
= 5 ⎝<br />
0<br />
0<br />
1<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
0 − 2<br />
1 − 0<br />
0 − 0<br />
⎞<br />
1<br />
2<br />
0<br />
⎞<br />
⎛<br />
⎠ + ⎝<br />
⎛<br />
⎠ = ⎝<br />
−10<br />
5<br />
0<br />
1<br />
2<br />
0<br />
⎞<br />
⎠<br />
⎞<br />
⎛<br />
⎠ + 2 ⎝<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
1<br />
2<br />
0<br />
0<br />
0<br />
1<br />
⎞⎞<br />
⎠⎠<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 8-1
Vektorprodukte einfacher berechenbare Skalarprodukte<br />
Grassmann-Identität: (⃗a × ⃗ b) × ⃗c = (⃗a · ⃗c) ⃗ b − ( ⃗ b · ⃗c)⃗a <br />
⎛⎛<br />
⎝⎝<br />
1<br />
2<br />
3<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
0<br />
1<br />
2<br />
⎞⎞<br />
⎛<br />
⎠⎠ × ⎝<br />
−2<br />
1<br />
0<br />
⎞<br />
⎛<br />
⎠ = 0 ⎝<br />
0<br />
1<br />
2<br />
⎞<br />
⎛<br />
⎠ − 1 ⎝<br />
1<br />
2<br />
3<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
−1<br />
−2<br />
−3<br />
Lagrange-Identität: (⃗a × ⃗ b) · (⃗c × ⃗ d) = (⃗a · ⃗c)( ⃗ b · ⃗d) − (⃗a · ⃗d)( ⃗ b · ⃗c) <br />
⎛⎛<br />
⎝⎝<br />
1<br />
2<br />
3<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
0<br />
1<br />
2<br />
⎞⎞<br />
⎛⎛<br />
⎠⎠ · ⎝⎝<br />
−2<br />
1<br />
0<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
3<br />
0<br />
3<br />
⎞⎞<br />
⎞<br />
⎠<br />
⎠⎠ = 0 · 6 − 12 · 1 = −12<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Vektorprodukt 8-2
Epsilon-Tensor<br />
Der ε-Tensor<br />
ε i,j,k ∈ {−1, 0, 1}, i, j, k ∈ {1, 2, 3} ,<br />
ist Null bei zwei gleichen Indizes und hat für paarweise verschiedene<br />
Indizes die Werte<br />
ε 1,2,3 = ε 2,3,1 = ε 3,1,2 = 1 ,<br />
ε 1,3,2 = ε 2,1,3 = ε 3,2,1 = −1 .<br />
Er ist also invariant unter zyklischer Permutation und ändert bei<br />
Vertauschung von Indizes das Vorzeichen.<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Epsilon-Tensor 1-1
Beispiel:<br />
Vektorprodukt<br />
⎛<br />
⃗c = ⃗a × ⃗ b = ⎝<br />
Darstellung mit Hilfe des ε-Tensors<br />
z.B.<br />
c i =<br />
⎞<br />
a 2 b 3 − a 3 b 2<br />
a 3 b 1 − a 1 b 3<br />
⎠<br />
a 1 b 2 − a 2 b 1<br />
3∑<br />
ε i,j,k a j b k<br />
j,k=1<br />
c 1 = ε 1,2,3 a 2 b 3 + ε 1,3,2 a 3 b 2<br />
} {{ } } {{ }<br />
1<br />
−1<br />
c 2 , c 3 durch zyklische Indexverschiebung<br />
<strong>Vektorrechnung</strong> – Vektorprodukt Epsilon-Tensor 2-1
Spatprodukt<br />
Das Spatprodukt<br />
[ ⃗a, ⃗ b,⃗c<br />
]<br />
= ⃗a · ( ⃗ b × ⃗c) =<br />
a 1 (b 2 c 3 − b 3 c 2 ) + a 2 (b 3 c 1 − b 1 c 3 ) + a 3 (b 1 c 2 − b 2 c 1 )<br />
stimmt bis auf Vorzeichen mit dem Volumen des von den drei Vektoren ⃗a,<br />
⃗ b, ⃗c aufgespannten Spats überein. Es ist positiv, wenn die Vektoren ⃗a, ⃗ b, ⃗c<br />
gemäß der Rechten-Hand-Regel orientiert sind.<br />
⃗ b × ⃗c<br />
⃗a<br />
⃗c<br />
⃗ b<br />
<strong>Vektorrechnung</strong> – Spatprodukt Spatprodukt 1-1
Mit Hilfe des ε-Tensors lässt sich das Spatprodukt auch in der Form<br />
[ ]<br />
3∑<br />
⃗a, ⃗ b,⃗c = ε i,j,k a i b j c k<br />
schreiben.<br />
i,j,k=1<br />
<strong>Vektorrechnung</strong> – Spatprodukt Spatprodukt 1-2
Beweis:<br />
Normale des von ⃗ b, ⃗c aufgespannten Parallelogramms:<br />
⃗ d =<br />
⃗ b × ⃗c<br />
| ⃗ b × ⃗c|<br />
Höhe des Spats (Länge der Projektion von ⃗a auf ⃗ d):<br />
∣<br />
h = |⃗a| ∣cos ∢(⃗a, ⃗ d) ∣ = |⃗a · ⃗d| ,<br />
da | ⃗ d| = 1<br />
Volumen (Produkt aus Höhe und Flächeninhalt des Parallelogramms):<br />
( )∣ ⃗b × ⃗c ∣∣∣∣ ∣ ⃗a · | ⃗ | ⃗ b × ⃗c| = |[⃗a, ⃗ b,⃗c]|<br />
b × ⃗c|<br />
<strong>Vektorrechnung</strong> – Spatprodukt Spatprodukt 2-1
Beispiel:<br />
Oberfläche und Volumen des von den Vektoren<br />
⎛ ⎞ ⎛ ⎞<br />
0<br />
⃗a = ⎝ 1 ⎠ , ⃗ 2<br />
b = ⎝ 0 ⎠ , ⃗c =<br />
0<br />
3<br />
aufgespannten Spats:<br />
(i) Oberfläche<br />
⃗a ⊥ ⃗ b Rechteck F ab = 1 · √2 2 + 3 2 = √ 13<br />
Permutation und Scherung F ca = F ab<br />
⎛<br />
F bc =<br />
⎝<br />
∣<br />
2<br />
0<br />
3<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
3<br />
1<br />
2<br />
⎞<br />
∣⎛<br />
∣∣∣∣∣ ⎠<br />
∣ = ⎝<br />
−3<br />
5<br />
2<br />
⎛<br />
⎝<br />
3<br />
1<br />
2<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
∣ = √ 9 + 25 + 4 = √ 38<br />
Oberfläche = 2F ab + 2F ca + 2F bc = 4 √ 13 + 2 √ ⎛ 38 ⎞ ≈⎛<br />
26.75 ⎞<br />
0 −3<br />
(ii) Volumen = |[⃗a, ⃗ b,⃗c]| = |⃗a · ( ⃗ b × ⃗c)| = | ⎝ 1 ⎠ · ⎝<br />
0<br />
5<br />
2<br />
⎠ | = 5<br />
<strong>Vektorrechnung</strong> – Spatprodukt Spatprodukt 3-1
Eigenschaften des Spatprodukts<br />
Das Spatprodukt ist linear in jedem Argument und besitzt darüber hinaus<br />
die folgenden weiteren Eigenschaften.<br />
zyklische Vertauschung:<br />
lineare Abhängigkeit:<br />
[⃗a, ⃗ b,⃗c] = [ ⃗ b,⃗c,⃗a] = [⃗c,⃗a, ⃗ b]<br />
[⃗a, ⃗ b,⃗c] = 0 ⇔ ⃗0 = α⃗a + β ⃗ b + γ⃗c<br />
mit mindestens einem Skalar α, β, γ ungleich 0.<br />
Orientierung:<br />
für jedes Rechtssystem.<br />
[⃗a, ⃗ b,⃗c] > 0<br />
<strong>Vektorrechnung</strong> – Spatprodukt Spatprodukt 4-1
Volumen eines Tetraeders<br />
Das Volumen V eines Tetraeders,<br />
<br />
der von den Vektoren ⃗a, ⃗ b und ⃗c<br />
aufgespannt wird, lässt sich mit Hilfe des Spatproduktes berechnen:<br />
V = 1 6 |[⃗a,⃗ b,⃗c]| .<br />
ÖÖÔÐÑÒØ× <br />
<br />
<strong>Vektorrechnung</strong> – Spatprodukt Volumen eines Tetraeders 1-1
Beweis:<br />
Volumen eines Tetraeders:<br />
V = 1 3 Gh<br />
mit h der Höhe und G dem Inhalt der Grundfläche: G = G Spat /2<br />
=⇒<br />
V = 1 6 G Spath = 1 6 V Spat = 1 6 |[⃗a,⃗ b,⃗c]|<br />
mit dem Spatvolumen V Spat<br />
<strong>Vektorrechnung</strong> – Spatprodukt Volumen eines Tetraeders 2-1
Beispiel:<br />
Tetraeder, aufgespannt von<br />
⎛ ⎞<br />
0<br />
⃗a = ⎝ 1 ⎠ ,<br />
1<br />
Volumen:<br />
⃗ b =<br />
⎛<br />
⎝<br />
1<br />
1<br />
0<br />
⎞<br />
⎛<br />
⎠ , ⃗c = ⎝<br />
V = 1 6 |[⃗a,⃗ b,⃗c]|<br />
⎛ ⎞ ⎛⎛<br />
⎞ ⎛<br />
= 1 0 1<br />
⎝<br />
6<br />
1 ⎠ · ⎝⎝<br />
1 ⎠ × ⎝<br />
∣ 1 0<br />
⎛ ⎞ ⎛ ⎞<br />
= 1 0 0<br />
⎝<br />
6<br />
1 ⎠ · ⎝ 0 ⎠<br />
∣ 1 2 ∣<br />
= 2 6 = 1 3<br />
0<br />
2<br />
0<br />
0<br />
2<br />
0<br />
⎞<br />
⎠<br />
⎞⎞<br />
⎠⎠<br />
∣<br />
<strong>Vektorrechnung</strong> – Spatprodukt Volumen eines Tetraeders 3-1
Berechnung von Koordinaten mit Hilfe des Spatproduktes<br />
Spannen die Vektoren ⃗u, ⃗v und ⃗w ein echtes Spat auf, so lässt sich ein<br />
beliebiger Vektor ⃗x als Linearkombination<br />
darstellen mit den Koeffizienten<br />
⃗x = α⃗u + β⃗v + γ⃗w<br />
α =<br />
[⃗x,⃗v, ⃗w]<br />
[⃗u,⃗v, ⃗w] ,<br />
[⃗x, ⃗w,⃗u]<br />
β =<br />
[⃗v, ⃗w,⃗u] ,<br />
γ = [⃗x,⃗u,⃗v]<br />
[⃗w,⃗u,⃗v] .<br />
<strong>Vektorrechnung</strong> – Spatprodukt Berechnung von Koordinaten 1-1
Beweis:<br />
Skalarprodukt mit ⃗v × ⃗w <br />
⃗x = α⃗u + β⃗v + γ⃗w<br />
⃗x · (⃗v × ⃗w) = α⃗u · (⃗v × ⃗w)<br />
wegen ⃗v · (⃗v × ⃗w) = 0 = ⃗w · (⃗v × ⃗w)<br />
[⃗u,⃗v, ⃗w] ≠ 0 =⇒<br />
[⃗x,⃗v, ⃗w]<br />
α =<br />
[⃗u,⃗v, ⃗w]<br />
analoge Berechnung von β und γ<br />
<strong>Vektorrechnung</strong> – Spatprodukt Berechnung von Koordinaten 2-1
Beispiel:<br />
Darstellung des Vektors<br />
⎛<br />
⃗x = ⎝<br />
−2<br />
8<br />
2<br />
als Linearkombination der Basisvektoren<br />
⎛ ⎞ ⎛<br />
2<br />
1<br />
⃗u = ⎝ 0 ⎠ , ⃗v = ⎝ 1<br />
2<br />
1<br />
Spatprodukte:<br />
⎛<br />
[⃗u,⃗v, ⃗w] = [⃗v, ⃗w,⃗u] = [⃗w,⃗u,⃗v] = ⎝<br />
⎛<br />
= ⎝<br />
⎞<br />
⎞<br />
⎠<br />
⎛<br />
⎠ , ⃗w = ⎝<br />
2<br />
0<br />
2<br />
2<br />
0<br />
2<br />
⎞<br />
⎛⎛<br />
⎠ · ⎝⎝<br />
⎞<br />
⎛<br />
⎠ · ⎝<br />
1<br />
1<br />
1<br />
0<br />
−1<br />
1<br />
0<br />
1<br />
1<br />
⎞<br />
⎞<br />
⎠<br />
⎛<br />
⎠ × ⎝<br />
⎞<br />
⎠ = 2<br />
0<br />
1<br />
1<br />
⎞⎞<br />
⎠⎠<br />
<strong>Vektorrechnung</strong> – Spatprodukt Berechnung von Koordinaten 3-1
⎛<br />
[⃗x,⃗v, ⃗w] = ⎝<br />
⎛<br />
= ⎝<br />
−2<br />
8<br />
2<br />
−2<br />
8<br />
2<br />
⎞<br />
⎛⎛<br />
⎠ · ⎝⎝<br />
⎞<br />
⎛<br />
⎠ · ⎝<br />
1<br />
1<br />
1<br />
0<br />
−1<br />
1<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
⎞<br />
⎠ = −6<br />
0<br />
1<br />
1<br />
⎞⎞<br />
⎠⎠<br />
analog<br />
Quotienten Koeffizienten<br />
[⃗x, ⃗w,⃗u] = 8, [⃗x,⃗u,⃗v] = 8<br />
⃗x = −6<br />
2 ⃗u + 8 2 ⃗v + 8 ⃗w = −3⃗u + 4⃗v + 4⃗w<br />
2<br />
<strong>Vektorrechnung</strong> – Spatprodukt Berechnung von Koordinaten 3-2
Punkt-Richtungs-Form<br />
Die Punkte X auf einer Geraden durch P mit Richtung ⃗u lassen sich in<br />
parametrischer Form durch<br />
darstellen.<br />
−→<br />
PX = t⃗u,<br />
t ∈ R<br />
P<br />
⃗u<br />
X<br />
Entsprechend gilt<br />
x i = p i + tu i , i = 1, 2, 3 ,<br />
für die Koordinaten des Ortsvektors ⃗x.<br />
<strong>Vektorrechnung</strong> – Geraden Punkt-Richtungs-Form 1-1
Beispiel:<br />
Punkt-Richtungs-Form einer Geraden<br />
( ) ( 1 2<br />
g : ⃗x = + t<br />
3 −1<br />
)<br />
, t ∈ R<br />
4<br />
3<br />
P<br />
( )<br />
3<br />
⃗u = 3<br />
2 −1.5<br />
X : Parameterwert t = 3/2<br />
2<br />
X<br />
( )<br />
1<br />
1<br />
⃗p =<br />
3<br />
( ) ( ) ( )<br />
1 3 4<br />
⃗x = + =<br />
3 −1.5 1.5<br />
0<br />
−1 0 1 2 3 4 5 6<br />
<strong>Vektorrechnung</strong> – Geraden Punkt-Richtungs-Form 2-1
Zwei-Punkte-Form<br />
Die Punkte X auf einer Geraden durch zwei Punkte P ≠ Q lassen sich in<br />
der Form<br />
−→<br />
PX = t −→ PQ, t ∈ R ,<br />
darstellen. Die Parameterwerte t ∈ [0, 1] entsprechen der Strecke PQ.<br />
−→<br />
P Q<br />
Q<br />
X<br />
P<br />
−−→<br />
P X<br />
Entsprechend gilt<br />
x i = p i + t(q i − p i ), i = 1, 2, 3 ,<br />
für die Koordinaten des Ortsvektors ⃗x.<br />
<strong>Vektorrechnung</strong> – Geraden Zwei-Punkte-Form 1-1
Beispiel:<br />
Zwei-Punkte-Form einer Geraden<br />
( 1<br />
g : ⃗x =<br />
3<br />
)<br />
+ t<br />
( 5 − 1<br />
1 − 3<br />
)<br />
, t ∈ R<br />
3<br />
P<br />
2<br />
( ) 1<br />
⃗p =<br />
3<br />
X<br />
1<br />
Q = (5, 1)<br />
( ) ( ) ( )<br />
1 5 − 1 3<br />
⃗x = +<br />
3<br />
1 =<br />
2 1 − 3 2<br />
0<br />
0 1 2 3 4 5 6<br />
X teilt PQ im Verhältnis t : (1 − t)<br />
t = 1/2 Mittelpunkt zwischen den Punkten P und Q<br />
<strong>Vektorrechnung</strong> – Geraden Zwei-Punkte-Form 2-1
Momentenform<br />
Die Punkte X auf einer Geraden durch P mit Richtung ⃗u lassen sich durch<br />
beschreiben.<br />
−→<br />
PX × ⃗u = ⃗0<br />
P<br />
−→<br />
OP = ⃗p<br />
O<br />
⃗u<br />
|⃗p × ⃗u| = |⃗c|<br />
−−→<br />
P X<br />
X<br />
⃗x = −−→ OX<br />
⃗u<br />
|⃗x × ⃗u| = |⃗c|<br />
Entsprechend gilt für den Ortsvektor ⃗x × ⃗u = ⃗c, ⃗c = ⃗p × ⃗u.<br />
<strong>Vektorrechnung</strong> – Geraden Momentenform 1-1
Beispiel:<br />
Momentenform einer Geraden: X ∈ g ⇔ −→ PX × ⃗u = ⃗0<br />
4<br />
3<br />
| −−→ P X2 × ⃗u|<br />
P = (1, 3)<br />
( )<br />
2<br />
⃗u =<br />
−1<br />
2<br />
1<br />
−−→<br />
P X2<br />
X2 = (3.5, 1)<br />
−−→<br />
P X1<br />
X1 = (5, 1)<br />
0<br />
−1 0 1 2 3 4 5 6 7<br />
−−→<br />
PX 1 × ⃗u =<br />
=<br />
⎛⎛<br />
⎝⎝<br />
⎛<br />
⎝<br />
5<br />
1<br />
0<br />
4<br />
−2<br />
0<br />
⎞<br />
⎛<br />
⎠ − ⎝<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
1<br />
3<br />
0<br />
2<br />
−1<br />
0<br />
⎞⎞<br />
⎛<br />
⎠⎠ × ⎝<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
2<br />
−1<br />
0<br />
⎞<br />
⎠<br />
0<br />
0<br />
4 · (−1) − (−2) · 2<br />
⎞<br />
⎠ = ⃗0<br />
<strong>Vektorrechnung</strong> – Geraden Momentenform 2-1
−−→<br />
PX 2 × ⃗u =<br />
=<br />
⎛<br />
⎝<br />
⎛<br />
⎝<br />
2.5<br />
−2<br />
0<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
2<br />
−1<br />
0<br />
⎞<br />
⎠<br />
0<br />
0<br />
2.5 · (−1) − (−2) · 2<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
0<br />
0<br />
1.5<br />
⎞<br />
⎠ ≠ ⃗0<br />
<strong>Vektorrechnung</strong> – Geraden Momentenform 2-2
Abstand Punkt-Gerade<br />
Die Projektion X eines Punktes Q auf eine Gerade durch P mit Richtung<br />
⃗u erfüllt<br />
−→<br />
(⃗q − ⃗p) · ⃗u<br />
PX = t⃗u, t =<br />
|⃗u| 2 .<br />
⃗u<br />
t⃗u = −−→ X<br />
P X<br />
|(⃗q − ⃗p) × ⃗u|<br />
P<br />
⃗u<br />
−→<br />
P Q = ⃗q − ⃗p<br />
Q<br />
−→<br />
OP = ⃗p<br />
−→<br />
OQ = ⃗q<br />
O<br />
<strong>Vektorrechnung</strong> – Geraden Abstand Punkt-Gerade 1-1
Der Abstand d = | −→ XQ| lässt sich alternativ mit dem Vektorprodukt<br />
berechnen:<br />
|(⃗q − ⃗p) × ⃗u|<br />
d = .<br />
|⃗u|<br />
<strong>Vektorrechnung</strong> – Geraden Abstand Punkt-Gerade 1-2
Beweis:<br />
prüfe Orthogonalität von −→ XQ zu ⃗u (⃗x = ⃗p + t⃗u):<br />
( (<br />
))<br />
−→<br />
(⃗q − ⃗p) · ⃗u<br />
XQ ·⃗u = ⃗q − ⃗p +<br />
|⃗u| 2 ⃗u ·⃗u = (⃗q − ⃗p) ·⃗u −<br />
Definition des Vektorproduktes:<br />
|⃗a × ⃗ b| = |⃗a| | ⃗ b| sin ∢(⃗a, ⃗ b)<br />
(⃗q − ⃗p)⃗u<br />
|⃗u| 2 |⃗u| 2 = 0<br />
Formel für den Abstand d:<br />
d = ∣ −→<br />
XQ∣ = ∣ −→<br />
PQ∣ sin ∢( −→ PQ,⃗u) =<br />
|(⃗q − ⃗p) × ⃗u|<br />
=<br />
|⃗u|<br />
∣ −→<br />
PQ∣ |⃗u| sin ∢( −→ PQ,⃗u)<br />
|⃗u|<br />
<strong>Vektorrechnung</strong> – Geraden Abstand Punkt-Gerade 2-1
Beispiel:<br />
Projektion von Q = (3, 3, 3) auf die Gerade<br />
⎛ ⎞ ⎛<br />
2<br />
g : ⎝ 1 ⎠ + t ⎝<br />
3<br />
Punkt X mit dem Ortsvektor<br />
⃗p +<br />
(⃗q − ⃗p) · ⃗u<br />
|⃗u| 2 ⃗u =<br />
=<br />
⎛<br />
⎝<br />
⎛<br />
⎝<br />
2<br />
1<br />
3<br />
2<br />
1<br />
3<br />
⎞<br />
⎠ +<br />
⎞<br />
⎛⎛<br />
⎝⎝<br />
3<br />
3<br />
3<br />
⎞<br />
1<br />
1<br />
1<br />
⎞<br />
⎠<br />
⎛<br />
⎠ + 1 · 1 + 2 · 1 + 0 · 1<br />
3<br />
⎞⎞<br />
⎛<br />
⎞<br />
2 1<br />
⎠ − ⎝ 1 ⎠⎠ · ⎝ 1 ⎠ ⎛<br />
3 1<br />
⎝<br />
1 2 + 1 2 + 1 2<br />
⎛<br />
⎝<br />
1<br />
1<br />
1<br />
⎞<br />
⎛<br />
⎠ = ⎝<br />
3<br />
2<br />
4<br />
1<br />
1<br />
1<br />
⎞<br />
⎠<br />
⎞<br />
⎠<br />
<strong>Vektorrechnung</strong> – Geraden Abstand Punkt-Gerade 3-1
Abstand:<br />
d = ∣ −→<br />
XQ∣ =<br />
√<br />
(3 − 3) 2 + (3 − 2) 2 + (3 − 4) 2 = √ 2<br />
alternativ (Anwendung der Formel d = |(⃗q−⃗p)×⃗u|<br />
|⃗u|<br />
):<br />
∣⎛<br />
⎞ ⎛ ⎞∣<br />
⎝<br />
∣<br />
d =<br />
1<br />
2<br />
0<br />
1<br />
⎠ × ⎝ 1 ⎠<br />
√<br />
1 ∣ (2 − 0)<br />
√ =<br />
2 + (0 − 1) 2 + (1 − 2) 2<br />
3 3<br />
= √ 2<br />
<strong>Vektorrechnung</strong> – Geraden Abstand Punkt-Gerade 3-2
Abstand zweier Geraden<br />
Der Abstand zweier durch die Punkte P, Q und Richtungen ⃗u, ⃗v<br />
gegebener Geraden ist<br />
d = |[−→ PQ,⃗u,⃗v]|<br />
,<br />
|⃗u × ⃗v|<br />
falls ⃗u ̸‖ ⃗v.<br />
[ −→ ]∣ ∣∣<br />
∣ P Q, ⃗u, ⃗v<br />
⃗v<br />
Q<br />
−→<br />
P Q<br />
⃗u<br />
P<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 1-1
Für parallele Geraden gilt<br />
d = |−→ PQ × ⃗u|<br />
.<br />
|⃗u|<br />
Man bezeichnet zwei Geraden als windschief, wenn sie nicht parallel sind<br />
und einen positiven Abstand haben.<br />
Die Punkte X , Y kürzesten Abstandes erhält man aus den<br />
Orthogonalitätsbedingungen<br />
⃗x − ⃗y ⊥ ⃗u,⃗v,<br />
⃗x = ⃗p + s⃗u, ⃗y = ⃗q + t⃗v<br />
durch Lösen des resultierenden linearen Gleichungssystems für die<br />
Parameter s, t.<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 1-2
Beweis:<br />
Ortsvektoren der Punkte kürzesten Abstandes:<br />
⃗x = ⃗p + s⃗u,<br />
⃗y = ⃗q + t⃗v<br />
Differenzvektor:<br />
−→<br />
XY = −→ PQ + t⃗v − s⃗u<br />
orthogonal zu beiden Richtungsvektoren, also parallel zu<br />
⃗c = ⃗u × ⃗v<br />
berechne | −→ XY | als Betrag des Skalarproduktes mit einem parallelen<br />
Einheitsvektor:<br />
d = | −→ XY | =<br />
∣ (−→ PQ + t⃗v − s⃗u) · ⃗c<br />
∣ ∣∣∣ |⃗c| ∣ = −→ ⃗c<br />
PQ · |⃗c| ∣<br />
parallele Geraden: Formel für den Abstand eines Punktes<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 2-1
Beispiel:<br />
Geraden:<br />
g : ⃗x = (1, 1, 3) t + s(1, 2, 1) t ,<br />
Abstand:<br />
⎛⎛<br />
[ −→<br />
]∣ ⎝⎝<br />
∣∣<br />
∣ PQ,⃗u,⃗v ∣<br />
d =<br />
=<br />
|⃗u × ⃗v|<br />
=<br />
4<br />
1<br />
4<br />
⎞<br />
⎠ − ⎝<br />
h : ⃗y = (4, 1, 4) t + t(1, −2, 1) t<br />
⎛<br />
1<br />
1<br />
3<br />
⎛<br />
⎝<br />
∣<br />
⎞⎞<br />
⎛⎛<br />
⎠⎠ · ⎝⎝<br />
1<br />
2<br />
1<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
1<br />
2<br />
1<br />
1<br />
−2<br />
1<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
⎞<br />
⎠<br />
∣<br />
⎛ ⎞ ⎛ ⎞<br />
3 4<br />
⎝<br />
0 ⎠ · ⎝ 0 ⎠<br />
∣ 1 −4 ∣<br />
√<br />
(2 − (−2)) 2 + (1 − 1) 2 + ((−2) − 2) = 8<br />
2 4 √ 2 = √ 2<br />
1<br />
−2<br />
1<br />
⎞⎞<br />
⎠⎠<br />
∣<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 3-1
Punkte kürzesten Abstandes:<br />
⃗x − ⃗y ⊥ (1, 2, 1) t , (1, −2, 1) t ⇔ lineares Gleichungssystem<br />
0 = ( (−3, 0, −1) t + s(1, 2, 1) t − t(1, −2, 1) t) · (1, 2, 1) t<br />
= −4 + 6s + 2t<br />
0 = ( (−3, 0, −1) t + s(1, 2, 1) t − t(1, −2, 1) t) · (1, −2, 1) t<br />
= −4 − 2s − 6t<br />
Lösung s = 1, t = −1 <br />
⃗x = (2, 3, 4) t ,<br />
⃗y = (3, 3, 3) t<br />
zur Kontrolle:<br />
d = |⃗x − ⃗y| = |(−1, 0, 1) t | = √ 2<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 3-2
Beispiel:<br />
Flugkorridore:<br />
300<br />
200<br />
Frankfurt<br />
100<br />
0<br />
Stuttgart<br />
Kopenhagen<br />
Stuttgart: S = (0, 0, 0)<br />
Frankfurt: F = (−50, 150, −1/4)<br />
Frankfurt nach Kairo ‖ (34, −31, 4) t<br />
Stuttgart nach Kopenhagen ‖ (8, 16, 1) t<br />
−100<br />
Kairo<br />
−100 0 100 200 300<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 4-1
Steigflug Stuttgart nach Kopenhagen (Flughöhe 8 km):<br />
s(8, 16, 1) t , s ∈ [0, 8]<br />
Steigflug Frankfurt nach Kairo (Flughöhe 12 km):<br />
Abstand der Flugbahnen<br />
⎛⎛<br />
⎞ ⎛<br />
−50<br />
⎝⎝<br />
150 ⎠ − ⎝<br />
∣ −1/4<br />
d =<br />
⎛<br />
⎝<br />
∣<br />
=<br />
⎛<br />
⎝<br />
∣<br />
t(34, −31, 4) t , t ∈ [0, 3]<br />
0<br />
0<br />
0<br />
8<br />
16<br />
1<br />
⎞⎞<br />
⎛⎛<br />
⎠⎠ · ⎝⎝<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
8<br />
16<br />
1<br />
34<br />
−31<br />
4<br />
⎞<br />
⎛<br />
⎠ × ⎝<br />
⎞<br />
⎠<br />
∣<br />
⎞ ⎛ ⎞<br />
−50 95<br />
150 ⎠ · ⎝ 2 ⎠<br />
−1/4 −792 ∣<br />
√ = √ 4252 ≈ 5.33<br />
95 2 + 2 2 + 792 2 636293<br />
34<br />
−31<br />
4<br />
⎞⎞<br />
⎠⎠<br />
∣<br />
<strong>Vektorrechnung</strong> – Geraden Abstand zweier Geraden 4-2
Parametrische Darstellung einer Ebene<br />
Punkte X auf einer Ebene durch P, die von zwei nicht parallelen<br />
Richtungen ⃗u und ⃗v aufgespannt wird, erfüllen<br />
−→<br />
PX = s⃗u + t⃗v, s, t ∈ R .<br />
s⃗v<br />
X<br />
P<br />
r⃗u<br />
O<br />
<strong>Vektorrechnung</strong> – Ebenen Parameterdarstellung einer Ebene 1-1
Entsprechend gilt<br />
x i = p i + su i + tv i , i = 1, 2, 3 .<br />
für die Koordinaten des Ortsvektors ⃗x.<br />
<strong>Vektorrechnung</strong> – Ebenen Parameterdarstellung einer Ebene 1-2
Beispiel:<br />
Ebene durch P = (1, 2, 3), aufgespannt von ⃗u = (2, 0, 0) t , ⃗v = (1, 1, 1) t<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
1 2 1<br />
E : ⃗x = ⎝ 2 ⎠ + s ⎝ 0 ⎠ + t ⎝ 1 ⎠ , s, t ∈ R<br />
3 0 1<br />
X = (1, 1, 2) ∈ E:<br />
⎛ ⎞<br />
0<br />
−→<br />
PX = ⎝−1⎠ = 1 ⃗u + (−1)⃗v<br />
2<br />
−1<br />
X = (0, 0, 0) /∈ E:<br />
für alle s, t<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
−1 2 1<br />
−→<br />
PX = ⎝−2⎠ ≠ s ⎝0⎠ + t ⎝1⎠<br />
−3 0 1<br />
<strong>Vektorrechnung</strong> – Ebenen Parameterdarstellung einer Ebene 2-1
Drei-Punkte-Form einer Ebene<br />
Für Punkte X auf einer Ebene durch drei Punkte P, Q, R, die ein echtes<br />
Dreieck bilden, verschwindet<br />
Ê<br />
das Spatprodukt:<br />
[ −→ PX , −→ PQ, −→ PR] = 0 .<br />
ÑÒØ× È É<br />
<strong>Vektorrechnung</strong> – Ebenen Drei-Punkte-Form einer Ebene 1-1
Mit Hilfe von Determinanten lässt sich die Ebenengleichung auch in der<br />
Form<br />
p 1 q 1 r 1 x 1<br />
p 2 q 2 r 2 x 2 = 0<br />
p 3 q 3 r 3 x 3<br />
1 1 1 1<br />
schreiben.<br />
<strong>Vektorrechnung</strong> – Ebenen Drei-Punkte-Form einer Ebene 1-2
Beispiel:<br />
Ebene E durch P = (1, 2, 3), Q = (3, 2, 3), R = (2, 3, 4)<br />
X = (1, 1, 2) ∈ E:<br />
⎡⎛<br />
⎞ ⎛ ⎞ ⎛ ⎞⎤<br />
⎛ ⎞ ⎛ ⎞<br />
[ −→ PX , −→ PQ, −→ 0 2 1 0 0<br />
PR] = ⎣⎝−1⎠ , ⎝0⎠ , ⎝1⎠⎦ = ⎝−1⎠ · ⎝−2⎠ = 0<br />
−1 0 1 −1 2<br />
X = (0, 0, 0) /∈ E:<br />
⎡⎛<br />
⎞ ⎛ ⎞ ⎛ ⎞⎤<br />
[ −→ PX , −→ PQ, −→ −1 2 1<br />
PR] = ⎣⎝−2⎠ , ⎝0⎠ , ⎝1⎠⎦ = 4 − 6 = −2 ≠ 0<br />
−3 0 1<br />
<strong>Vektorrechnung</strong> – Ebenen Drei-Punkte-Form einer Ebene 2-1
Ebenengleichung:<br />
0 =<br />
1 3 2 x 1<br />
2 2 3 x 2<br />
3 3 4 x 3<br />
1 1 1 1<br />
=<br />
1 3 2<br />
2 2 3<br />
3 3 4<br />
− x 3<br />
1 3 2<br />
2 2 3<br />
1 1 1<br />
+ x 2<br />
1 3 2<br />
3 3 4<br />
1 1 1<br />
− x 1<br />
2 2 3<br />
3 3 4<br />
1 1 1<br />
= 2 − 2x 3 + 2x 2 − 0x 1<br />
d.h. x 3 − x 2 = 1<br />
<strong>Vektorrechnung</strong> – Ebenen Drei-Punkte-Form einer Ebene 2-2
Hesse-Normalform einer Ebene<br />
Der Ortsvektor ⃗x eines Punktes X auf einer Ebene durch P orthogonal zu<br />
einem Normalenvektor ⃗n erfüllt<br />
⃗x · ⃗n = d,<br />
ÒÒ½ Ò<br />
d = ⃗p · ⃗n .<br />
È <br />
ÈËÖÖÔÐÑÒØ×<br />
Ç<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 1-1
Bei der Normalform wird dabei |⃗n| = 1 und d ≥ 0 angenommen. In diesem<br />
Fall ist d der Abstand der Ebene zum Ursprung. Der Normalenvektor zeigt<br />
vom Ursprung in Richtung der Ebene.<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 1-2
Beispiel:<br />
Ebene E durch P = (1, 2, 3) mit normierten Normalenvektor<br />
⃗n = (2, 2, 1) t /3<br />
Abstand zum Ursprung:<br />
⎛ ⎞ ⎛ ⎞<br />
1<br />
d = ⎝2⎠ · 1 2<br />
⎝2⎠ = 3<br />
3<br />
3 1<br />
Normalform<br />
X = (4, 0, 1) ∈ E:<br />
X = (0, 0, 0) /∈ E:<br />
E :<br />
2<br />
3 x 1 + 2 3 x 2 + 1 3 x 3 = 3<br />
⃗x · ⃗n = 1 (8 + 0 + 1) = d<br />
3<br />
⃗x · ⃗n = 0 ≠ d<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 2-1
Beispiel:<br />
Umrechnen von Ebenendarstellungen<br />
(i) Ebene durch den Punkt P, aufgespannt durch zwei nicht parallele<br />
Vektoren ⃗u,⃗v<br />
Parameterdarstellung<br />
E : ⃗x = ⃗p + s⃗u + t⃗v,<br />
s, t ∈ R<br />
weitere Punkte Q, R ∈ E:<br />
⃗q = ⃗p + ⃗u,<br />
⃗r = ⃗p + ⃗v<br />
normierter Normalenvektor:<br />
⃗u × ⃗v<br />
⃗n = σ<br />
|⃗u × ⃗v|<br />
σ ∈ {−1, 1} d = ⃗p · ⃗n ≥ 0 Hesse-Normalform ⃗x · ⃗n = d<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 3-1
(ii) Ebene durch drei Punkte P, Q und R, die ein echtes Dreieck bilden<br />
Drei-Punkte-Form<br />
E : [ ⃗x − ⃗p,⃗q − ⃗p,⃗r − ⃗p ] = 0<br />
Vektoren, die E aufspannen:<br />
⃗u = −→ PQ,<br />
⃗v = −→ PR<br />
Konstruktion der Hesse-Normalform wie in (i)<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 3-2
(iii) Ebene durch einen Punkt P und einen Normalvektor ⃗n<br />
Hesse-Normalform<br />
E : ⃗x · ⃗n 0 = d, d = ⃗p · ⃗n 0<br />
mit ⃗n 0 = σ · ⃗n/|⃗n|, σ ∈ {−1, 1} d ≥ 0<br />
Vektoren, die E aufspannen:<br />
⃗u = ⃗n × ⃗x,<br />
⃗v = ⃗n × ⃗u<br />
mit ⃗x ≠ λ⃗n<br />
Konstruktion der Drei-Punkte-Form wie in (i)<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 3-3
Beispiel:<br />
Ebene durch die Punkte<br />
P = (7, 2, 0), Q = (1, −6, 2), R = (−1, −8, 3)<br />
Drei-Punkte-Form:<br />
⎡ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎤<br />
7 1 7 −1 7<br />
E : ⎣⃗x − ⎝2⎠ , ⎝−6⎠ − ⎝2⎠ , ⎝−8⎠ − ⎝2⎠⎦ = 0<br />
0 2 0 3 0<br />
Differenzen der Ortsvektoren Richtungen, die die Ebene aufspannen:<br />
⎛ ⎞<br />
⎛ ⎞<br />
⃗u = −→ −6<br />
PQ = ⎝−8⎠ , ⃗v = −→ −8<br />
PR = ⎝−10⎠<br />
2<br />
3<br />
Parameterdarstellung der Ebene<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
7 −6 −8<br />
E : ⃗x = ⎝2⎠ + s ⎝−8⎠ + t ⎝−10⎠ ,<br />
0 2 3<br />
s, t ∈ R<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 4-1
Normalenvektor:<br />
⎛ ⎞ ⎛ ⎞<br />
−24 + 20 −4<br />
⃗n = ⃗u × ⃗v = ⎝−16 + 18⎠ = ⎝ 2 ⎠<br />
60 − 64 −4<br />
Normierung:<br />
σ = −1 <br />
Hesse-Normalform:<br />
⃗n 0 = σ 6<br />
⎛ ⎞<br />
−4<br />
⎝ 2 ⎠ , σ ∈ {−1, 1}<br />
−4<br />
⎛ ⎞ ⎛ ⎞<br />
7 −2/3<br />
d = ⃗p · ⃗n 0 = ⎝2⎠ · σ ⎝ 1/3 ⎠ = 4 > 0<br />
0 −2/3<br />
E : 2 3 x 1 − 1 3 x 2 + 2 3 x 3 = 4<br />
<strong>Vektorrechnung</strong> – Ebenen Hesse-Normalform einer Ebene 4-2
Abstand Punkt-Ebene<br />
Der Lotvektor eines Punktes Q auf eine Ebene E durch P mit<br />
Normalenvektor ⃗n ist<br />
−→<br />
−→ PQ · ⃗n<br />
XQ =<br />
|⃗n| 2 ⃗n .<br />
Q<br />
−→<br />
P Q<br />
−−→<br />
XQ<br />
⃗n<br />
P<br />
X<br />
O<br />
<strong>Vektorrechnung</strong> – Ebenen Abstand Punkt-Ebene 1-1
Die Länge des Lotvektors,<br />
d = |−→ PQ · ⃗n|<br />
,<br />
|⃗n|<br />
ist der Abstand der Ebene zu Q. Der Punkt X mit Ortsvektor<br />
⃗x = ⃗q −<br />
(⃗q − ⃗p) · ⃗n<br />
|⃗n| 2 ⃗n<br />
wird als Projektion von Q auf E bezeichnet.<br />
<strong>Vektorrechnung</strong> – Ebenen Abstand Punkt-Ebene 1-2
Beweis:<br />
Projektion:<br />
X ∈ E =⇒<br />
⃗x = ⃗q − λ⃗n<br />
⃗x · ⃗n = ⃗q · ⃗n − λ|⃗n| 2 = ⃗p · ⃗n<br />
Auflösen nach λ Formel für den Abstand<br />
λ =<br />
(⃗q − ⃗p) · ⃗n<br />
|⃗n| 2 , d = |λ⃗n|<br />
Lotvektor:<br />
⃗q − ⃗x = λ⃗n<br />
<strong>Vektorrechnung</strong> – Ebenen Abstand Punkt-Ebene 2-1
Beispiel:<br />
Ebene E durch den Punkt P = (1, 2, 3) mit Normalenvektor ⃗n = (2, 1, 2)<br />
berechne Abstand d von Q = (3, 2, 3) sowie die Projektion X auf E<br />
⎛ ⎞<br />
−→<br />
PQ =<br />
2<br />
⎝0⎠ ,<br />
0<br />
Lotvektor und Abstand:<br />
⎛ ⎞<br />
−→<br />
−→ PQ · ⃗n<br />
XQ =<br />
|⃗n| 2 ⃗n = 4 2<br />
⎝1⎠ ,<br />
9<br />
2<br />
−→<br />
PQ · ⃗n = 4, |⃗n| = 3<br />
d = | −→ XQ| = 4 3<br />
Projektion:<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⃗x = ⃗q − −→ 3 8/9<br />
XQ = ⎝2⎠ − ⎝4/9⎠ = 1 19<br />
⎝14⎠<br />
9<br />
3 8/9 19<br />
<strong>Vektorrechnung</strong> – Ebenen Abstand Punkt-Ebene 3-1
Schnitt zweier Ebenen<br />
Der kleinere der beiden Winkel ϕ ∈ [0, π/2] zwischen zwei Ebenen mit<br />
Normalenvektoren ⃗n i ist durch<br />
cos ϕ = |⃗n 1 · ⃗n 2 |<br />
|⃗n 1 ||⃗n 2 |<br />
eindeutig bestimmt und ⃗u = ⃗n 1 ×⃗n 2 ist die Richtung der Schnittgeraden g.<br />
Ò½ Ò¾<br />
<strong>Vektorrechnung</strong> – Ebenen Schnitt zweier Ebenen 1-1
Einen Punkt P auf g kann man durch simultanes Einsetzen in beide<br />
Ebenengleichungen bestimmen und erhält dann<br />
g : ⃗x = ⃗p + t⃗u,<br />
t ∈ R<br />
als Parameterdarstellung von g.<br />
<strong>Vektorrechnung</strong> – Ebenen Schnitt zweier Ebenen 1-2
Beispiel:<br />
Schnitt von Ebenen durch die Punkte P 1 = (1, 2, 0), P 2 = (0, 1, 3) mit<br />
Normalenvektoren ⃗n 1 = (1, −1, 0) t , ⃗n 2 = (0, −1, 1) t<br />
Winkel:<br />
cos ϕ = |⃗n 1 · ⃗n 2 |<br />
|⃗n 1 ||⃗n 2 | = 1 2<br />
ϕ = π/3<br />
Richtung der Schnittgeraden g:<br />
⎛ ⎞<br />
−1<br />
⃗u = ⃗n 1 × ⃗n 2 = ⎝−1⎠<br />
−1<br />
<strong>Vektorrechnung</strong> – Ebenen Schnitt zweier Ebenen 2-1
Punkt X auf g durch Lösung der Ebenengleichungen ⃗x · ⃗n k = ⃗p k · ⃗n k :<br />
E 1 : x 1 − x 2 = −1, E 2 : −x 2 + x 3 = 2<br />
x 2 = 0 x 1 = −1 und x 3 = 2<br />
Parameterdarstellung der Schnittgeraden:<br />
⎛ ⎞ ⎛ ⎞<br />
−1 −1<br />
g : ⃗x = ⎝ 0 ⎠ + t ⎝−1⎠ ,<br />
2 −1<br />
t ∈ R<br />
<strong>Vektorrechnung</strong> – Ebenen Schnitt zweier Ebenen 2-2
Beispiel:<br />
Winkel zwischen Flächen eines regelmäßigen Tetraeders<br />
wähle<br />
P 1 = (1, 0, 0), P 2 = (−1, 0, 0), P 3 = (0, 1, √ 2), P 4 = (0, −1, √ 2)<br />
und betrachte Ebenen durch P 1 , P 2 , P 3 und P 1 , P 2 , P 4<br />
Normalenvektoren:<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⃗n 1 = P −−→<br />
1 P 2 × P −−→ −2 −1 0<br />
1 P 3 = ⎝ 0 ⎠ × ⎝<br />
√<br />
1 ⎠ = ⎝2 √ 2⎠<br />
0 2 −2<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⃗n 2 = P −−→<br />
1 P 2 × P −−→ −2 −1 0<br />
1 P 4 = ⎝ 0 ⎠ × ⎝<br />
√<br />
−1⎠ = ⎝2 √ 2⎠<br />
0 2 2<br />
Winkel:<br />
ϕ ≈ 70.53 ◦<br />
cos(ϕ) = |⃗n 1 · ⃗n 2 |<br />
|⃗n 1 ||⃗n 2 | = 4<br />
√<br />
12<br />
√<br />
12<br />
= 1 3<br />
<strong>Vektorrechnung</strong> – Ebenen Schnitt zweier Ebenen 3-1
Ellipse<br />
Für die Punkte P = (x, y) auf einer Ellipse ist die Summe der Abstände zu<br />
zwei Brennpunkten F ± konstant:<br />
mit 2a > | −−−→ F − F + |.<br />
| −−→ PF − | + | −−→ PF + | = 2a<br />
y<br />
P<br />
b<br />
r<br />
ϕ<br />
a<br />
F− F+<br />
x<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 1-1
Ist F ± = (±f , 0), so gilt für die Koordinaten<br />
und<br />
x 2<br />
a 2 + y 2<br />
b 2 = 1, b2 = a 2 − f 2 ,<br />
r 2 =<br />
für die Polarkoordinaten der Punkte P.<br />
Eine Parametrisierung der Ellipse ist<br />
b 2<br />
1 − (f /a) 2 cos 2 ϕ<br />
x = a cos t,<br />
y = b sin t<br />
mit t ∈ [0, 2π).<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 1-2
Beweis:<br />
(i) Äquivalenz der Darstellungen:<br />
| −−→ PF − | + | −−→ PF + | = 2a ⇐⇒ x 2<br />
a 2 + y 2<br />
b 2 = 1, b2 = a 2 − f 2<br />
Quadrieren von<br />
√<br />
2a − (x + f ) 2 + y 2 =<br />
} {{ }<br />
>0<br />
äquivalente Form der linken Gleichung<br />
√<br />
}<br />
4a 2 {{<br />
+ 4xf<br />
}<br />
= 4a (x + f ) 2 + y 2<br />
>0<br />
erneutes Quadrieren und Division durch (4a) 2 <br />
√<br />
(x − f ) 2 + y 2 = | −−→ PF + |<br />
a 2 + 2xf + f 2<br />
a 2 x 2 = x 2 + 2xf + f 2 + y 2<br />
Substitution von f 2 = a 2 − b 2 , Division durch b 2 Koordinatenform<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 2-1
(ii) Polarform:<br />
r 2 =<br />
b 2<br />
1 − (f /a) 2 cos 2 ϕ<br />
Multiplikation mit dem Nenner und Substitution von<br />
<br />
r 2 = x 2 + y 2 , f 2 = a 2 − b 2 , r 2 cos 2 (ϕ) = x 2<br />
x 2 + y 2 − a2 − b 2<br />
Koordinatenform nach Division durch b 2<br />
a 2 x 2 = b 2<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 2-2
Beispiel:<br />
Reflektion von Brennpunktstrahlen (F + P → PF − )<br />
Q<br />
P<br />
α<br />
α<br />
R<br />
F− F+<br />
Hilfspunkt Q ≠ P auf Tangente g außerhalb der Ellipse =⇒<br />
2a = | −−→ PF − | + | −−→ PF + | < | −−→ QF − | + | −−→ QF + |<br />
Ersetzen von PF + durch Spiegelbild PR an g <br />
| −−→ PF − | + | −→ PR| < | −−→ QF − | + | −→ QR| ∀Q ∈ g<br />
=⇒ F − , P, R kollinear, bzw. ∢(F − PQ) = α<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 3-1
Anwendung: Zertrümmerung von Nierensteinen<br />
Bündelung von Strahlen aus einer radialen Quelle im Brennpunkt F − durch<br />
einen elliptischen Reflektor im Brennpunkt F +<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Ellipse 3-2
Parabel<br />
Die Punkte P = (x, y) auf einer Parabel haben von einem Brennpunkt F<br />
und einer Leitgerade g den gleichen Abstand.<br />
y<br />
P<br />
F<br />
r<br />
ϕ<br />
x<br />
g<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Parabel 1-1
Ist F = (0, f ) und g : y = −f , so gilt für die Koordinaten<br />
und<br />
4fy = x 2<br />
r =<br />
für die Polarkoordinaten der Punkte P.<br />
4f sin ϕ<br />
cos 2 ϕ<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Parabel 1-2
Beweis:<br />
(i) Äquivalenz der Darstellungen:<br />
Gleichsetzen der quadrierten Abstände <br />
| −→ PF | 2 = x 2 + (y − f ) 2 = (y + f ) 2 = (dist(P, g)) 2<br />
Vereinfachung <br />
(ii) Polarform:<br />
substituiere<br />
<br />
x 2 = 4fy<br />
x = r cos ϕ, y = r sin ϕ<br />
r cos 2 ϕ = 4f sin ϕ<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Parabel 2-1
Beispiel:<br />
Bündelung senkrecht zur Leitgerade einfallender Strahlen im Brennpunkt<br />
y<br />
α<br />
α<br />
P<br />
F<br />
x<br />
g<br />
R<br />
Q<br />
−→<br />
FP + −→ (( x<br />
QP =<br />
y<br />
) ( 0<br />
−<br />
f<br />
)) (( x<br />
+<br />
y<br />
) ( x<br />
−<br />
−f<br />
))<br />
=<br />
( x<br />
2y<br />
)<br />
parallel zur Richtung (1, x/(2f )) t der Tangente im Punkt P,<br />
| −→ FP| = | −→ QP| (Definition der Parabel) =⇒ ∢(F , P, R) = α = ∢(R, P, Q)<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Parabel 3-1
Hyperbel<br />
Für die Punkte P = (x, y) auf einer Hyperbel ist die Differenz der<br />
Abstände zu zwei Brennpunkten F ± konstant:<br />
mit 2a < | −−−→ F − F + |.<br />
| −−→ PF − | − | −−→ PF + | = ±2a<br />
y<br />
F−<br />
b<br />
r<br />
ϕ<br />
a<br />
P<br />
F+<br />
x<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 1-1
Ist F ± = (±f , 0), so gilt für die Koordinaten<br />
und<br />
x 2<br />
a 2 − y 2<br />
b 2 = 1, b2 = f 2 − a 2 ,<br />
b 2<br />
r 2 = −<br />
1 − (f /a) 2 cos 2 ϕ<br />
für die Polarkoordinaten der Punkte P. Die Asymptoten haben die<br />
Steigung ±b/a.<br />
Parametrisierungen der Hyperbeläste sind<br />
x = ±a cosh t,<br />
y = b sinh t<br />
mit t ∈ R.<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 1-2
Beweis:<br />
(i) Äquivalenz der Darstellungen:<br />
| −−→ PF − | − | −−→ PF + | = ±2a ⇐⇒ x 2<br />
a 2 − y 2<br />
b 2 = 1, b2 = f 2 − a 2<br />
Quadrieren von<br />
√<br />
√<br />
(x + f ) 2 + y 2 ∓ 2a = (x − f ) 2 + y 2 = | −−→ PF + |<br />
} {{ }<br />
>0<br />
äquivalente Identität zur linken Gleichung:<br />
√<br />
4a 2 + 4xf = ±4a (x + f ) 2 + y 2<br />
erneutes Quadrieren und Division durch (4a) 2 <br />
a 2 + 2xf + f 2<br />
a 2 x 2 = x 2 + 2xf + f 2 + y 2<br />
Substitution von f 2 = a 2 + b 2 und Division durch b 2 Koordinatenform<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 2-1
(ii) Polarform:<br />
b 2<br />
r 2 = −<br />
1 − (f /a) 2 cos 2 ϕ<br />
Multiplikation mit dem Nenner unter Berücksichtigung von<br />
r 2 = x 2 + y 2 , f 2 = a 2 + b 2 , x = r cos ϕ<br />
<br />
x 2 + y 2 − a2 + b 2<br />
a 2 x 2 = −b 2<br />
Division durch −b 2 Koordinatenform<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 2-2
Beispiel:<br />
Positionsbestimmung durch Zeitdifferenzen 2a j,k synchroner Radiosignale<br />
von Sendestationen F i<br />
F 1 F 2<br />
F 4<br />
S 1<br />
S 3<br />
S 4<br />
S 2<br />
F 3<br />
Position P: Schnittpunkt von Hyperbeln<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 3-1
konkrete Daten<br />
F 1 = (−2, 0), F 2 = (2, 0), F 3 = (0, −3), F 4 = (0, 3)<br />
a 1,2 = a 3,4 = 1<br />
Hyperbelgleichungen:<br />
x 2 − y 2<br />
3 = 1, y 2 − x 2<br />
(f 2 = a 2 + b 2 mit a = 1 und f = 2 bzw. f = 3)<br />
Koordinaten der möglichen 4 Schnittpunkte S i<br />
x 2 = 32<br />
23 , y 2 = 27<br />
23<br />
8 = 1<br />
<strong>Vektorrechnung</strong> – Quadratische Kurven Hyperbel 3-2