Kapitel 4 als PDF-Datei öffnen/herunterladen - IEM
Kapitel 4 als PDF-Datei öffnen/herunterladen - IEM
Kapitel 4 als PDF-Datei öffnen/herunterladen - IEM

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4 Oszillatoren © 2007 Dennis Melikjan<br />
Zur Erzeugung von ungedämpften sinusförmigen Schwingungen kann man Zweipol- bzw.<br />
Vierpol-Oszillatoren einsetzen.<br />
Bei den Zweipol-Oszillatoren wird durch Einbeziehung eines aktiven Zweipols mit negativem<br />
Widerstandsbereich (z.B. Tunneldioden u.a.) die Entdämpfung eines Schwingkreises<br />
herbeigeführt.<br />
Bei den Vierpol-Oszillatoren wird i.a. durch geeignete äußere Rückkopplung des<br />
Wechselsignales vom Ausgang eines Verstärker-Vierpols auf den Eingang eine Schwingung<br />
angeregt. Beurteilungskriterien von Oszillator-Schaltungen sind in erster Linie die<br />
Frequenzstabilität sowie ein möglichst geringer Oberwellengehalt der Ausgangsschwingung. Bei<br />
höheren Anforderungen hinsichtlich der Frequenzstabilität ist meist ein Schwingquarz<br />
einzusetzen.<br />
Zur Erzeugung eines Frequenzrasters (für ein Frequenz-Multiplex) werden heute i.a. PLL-Kreise<br />
eingesetzt.<br />
4.1 Grundprinzip eines Zweipol-Oszillators<br />
Zunächst sei kurz ein Reihenschwingkreis bestehend aus den Elementen R, L, C betrachtet, der<br />
im Zeitpunkt t = 0 an eine Quelle mit der Gleichspannung U 0 gelegt wird und dann sich selbst<br />
überlassen bleibt (Bild 4.1-1a).<br />
t≥0<br />
b)<br />
I<br />
I<br />
1<br />
A<br />
U<br />
2<br />
r =<br />
~<br />
U<br />
I<br />
U<br />
< 0<br />
Bild 4.1-1<br />
Reihenschwingkreis<br />
a) Einschalten einer Gleichspannung beim<br />
verlustbehafteten Schwingkreis<br />
b) Entdämpfung durch negativen<br />
differentiellen Widerstand<br />
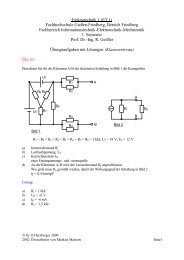
Ein Maschenumlauf in Bild 4.1-1a für t ≥ 0 (u C (0⎯) = 0 ) liefert die Gl.(4.1/1).<br />
i R + u L + u C = u 1 = U 0 (4.1/1)<br />
Mit u L = L di/dt sowie i = i C = C du C /dt in (4.1/1) erhält man die Differentialgleichung (4.1/2).<br />
L C d2 u C<br />
dt 2 + C R du C<br />
dt + u C = u 1 = U 0 (4.1/2)<br />
1
Aus dem homogenen Differentialgleichungsanteil erhält man mit dem Lösungsansatz<br />
u C,hom(t) = k e λ t (siehe TF, Übung 1/1, Hilfsgl. (6)) <strong>als</strong> charakteristische Gleichung<br />
L C λ² + C R λ + 1 = 0 und damit <strong>als</strong> Lösung die Gl.(4.1/3).<br />
aus TF, Üb.1/1, Hilfsgl. (7) λ = – R 1,2<br />
2L ± ⎝ ⎜⎛ R<br />
2L⎠ ⎟⎞ ² 1 –<br />
LC<br />
(4.1/3)<br />
Bei positivem Radikand (d.h. beim Vorliegen einer stärkeren Dämpfung) besteht in (4.1/3)<br />
für ⎜ ⎛ R<br />
⎝ 2L ⎠ ⎟⎞ ² 1 ><br />
LC<br />
der flüchtige Anteil aus zwei abklingenden Exponentialfunktionen.<br />
aus TF, Üb 1/1, Hilfsgl. (10) u C,hom(t) = k 1 e λ 1 t + k 2 e λ 2 t<br />
Spezielle Lösung (eingeschwungener Zustand) u C,spez(t) = u C (t→∞) = U 0<br />
u C (t) = u C,spez(t) + u C,hom(t) = U 0 + k 1 e λ 1 t + k 2 e λ 2 t (4.1/4)<br />
Der Gesamtlösungsansatz für u C (t) berechnet sich mit Gl.(4.1/4).<br />
Bei negativem Radikand (beim Vorliegen einer schwachen Dämpfung), d.h. für 1<br />
LC > ⎝ ⎜⎛ R<br />
2L⎠ ⎟⎞ ²<br />
in (4.1/3) gilt die Gl. (4.1/5).<br />
analog zu TF, Üb. 1/1, Hilfsgl. (7) + (8)<br />
λ 1,2 = – R 2L ± j 1<br />
LC – ⎝ ⎜⎛ R<br />
2L⎠ ⎟⎞ ² = – δ ± j ω0 ² - δ² = – δ ± jω e (4.1/5)<br />
In Gl.(4.1/5) beschreibt δ = R 2L das Dämpfungsmaß, ω 1<br />
0 = die Kreisfrequenz der<br />
LC<br />
ungedämpften Schwingung und ω e = ω 0 ² - δ² die Eigenkreisfrequenz der gedämpften<br />
Schwingung.<br />
analog zu TF, Üb. 1/1, Hilfsgl. (18)<br />
u C (t) = U 0 [ 1 – e – δt (cos (ω e t) + δ ω e<br />
sin (ω e t)) ] (4.1/6)<br />
Die gedämpfte Schwingung u C (t) lässt sich mit Gl.(4.1/6) berechnen.<br />
Beim normalen Reihenschwingkreis ist auf Grund der geringen Verluste der Widerstand R<br />
zwar klein, aber sicher positiv. Beim Schließen des Schalters (Bild 4.1-1a) tritt <strong>als</strong><br />
Ausgleichsvorgang eine gedämpfte Schwingung auf, die nach einiger Zeit abgeklungen ist.<br />
Im stationären (eingeschwungenen) Zustand (theoretisch t → ∞) ist dann <strong>als</strong> Spannung am<br />
Kondensator nur noch die Gleichspannung U 0 vorhanden.<br />
Interessant dagegen ist der Fall, dass man eine Entdämpfung des Schwingkreises erreicht und<br />
zwar durch Einbringen eines negativen Zusatzwiderstandes. Dadurch ließen sich die<br />
Gesamtverluste gerade zu null machen. Für den Sonderfall R ges = 0 und damit auch δ = 0<br />
bekäme man beim Einschalten einer Gleichspannung U 0 nach (4.1/6) eine ungedämpfte<br />
Schwingung mit der Frequenz ƒ 0 nach Gl. (4.1/6a).<br />
2
analog zu Gl. (4.1/5):<br />
δ = R ges<br />
2L = 0 => ω 1<br />
e = ω 0 => ƒ 0 =<br />
2π LC<br />
(4.1/6a)<br />
Für eine Entdämpfung eignen sich Bauelemente, die negative Widerstandsbereiche aufweisen.<br />
D. h. hierbei liegen i-u-Kennlinien vor, bei denen z.B. mit wachsender Spannung der Strom<br />
abnimmt (Bild 4.1-1b). Der differentielle (negative) Widerstand r n im Arbeitspunkt A lässt<br />
sich dann durch den Differenzen-Quotienten in Gl. (4.1/7) annähern.<br />
aus Bild (4.1-1b)<br />
negativer, differentieller Widerstand: r n = dU<br />
dI<br />
≈ ΔU<br />
ΔI<br />
= U 2 – U 1<br />
I 2 – I 1<br />
< 0 (4.1/7)<br />
I F<br />
R L =<br />
A<br />
T<br />
U B<br />
L<br />
Z<br />
R<br />
L<br />
a)<br />
U<br />
U<br />
U<br />
H B T F<br />
U<br />
b)<br />
I H<br />
IT<br />
H<br />
TD<br />
c)<br />
u<br />
i<br />
1<br />
rn<br />
i3<br />
L s A<br />
i2<br />
TD<br />
L z<br />
R L<br />
B<br />
äußerer<br />
Kreis<br />
Bild 4.1-2<br />
Zweipol-Oszillator mit Tunneldiode<br />
a) Kennlinie einer Tunneldiode<br />
b) Einfacher Tunneldioden-Oszillator<br />
c) Ersatzschaltbild zu b)<br />
Eine solche Kennlinie besitzen z.B. Tunneldioden (Bild 4.1-2a). Im Verlauf zwischen dem<br />
Höckerpunkt H und dem Talpunkt T tritt ein negativer Widerstandsbereich auf. Hier muss<br />
somit auch der Arbeitspunkt A gewählt werden.<br />
Eine einfache Schwingschaltung ergibt sich, wenn man eine Tunneldiode mit einem äußeren<br />
Kreis, bestehend aus einer Zusatzinduktivität L Z und einem Lastwiderstand R L , in Reihe an<br />
eine kleine Betriebsspannung U B legt (Bild 4.1-2b). Für einen stabilen Arbeitspunkt A muss die<br />
Gleichstrom-Lastgerade R L = so gewählt werden, wie im Bild 4.1-2a dargestellt, d.h U B muss<br />
zwischen U H und U T liegen. Das wechselmäßige Ersatzschaltbild für die Tunneldiode im<br />
Arbeitspunkt A mit der äußeren Beschaltung ist im Bild 4.1-2c angegeben. Die hier enthaltenen<br />
Ersatzgrößen sind in erster Linie der negative differentielle Widerstand –|r n | der Tunneldiode<br />
sowie die Kapazität Cj der Grenzschicht des pn-Übergangs. Zusätzlich kann man noch den<br />
Bahnwiderstand r B der Diode sowie die Zuleitungsinduktivität L S berücksichtigen. Aus dem<br />
Ersatzbild ist ersichtlich, dass Cj die erforderliche Schwingkreiskapazität darstellt.<br />
3
Um eine Aussage über die Schwingfrequenz ƒ 0 des Tunneldioden-Oszillators zu erhalten, setzt<br />
man wiederum die Differentialgleichung z.B. für u in der Ersatz-Schaltung (Bild 4.1-2c) an<br />
und entnimmt ω 0 aus der charakteristischen Gleichung. Mit den Abkürzungen R = r B + R L<br />
und L = L S + L Z erhält man mit Hilfe des Operators s und den dort eingetragenen Zählpfeilen<br />
die Gl. (4.1/8).<br />
aus Bild (4.1-2c)<br />
Abkürzungen: R = r B + R L , L = L S + L Z<br />
i 3 =<br />
u<br />
R + sL = –i 1 – i 2 = –u<br />
–|r n |<br />
u<br />
R + sL = – u( – 1<br />
|r n | + sC j )<br />
(– 1<br />
|r n | + sC j ) (R + sL) + 1 = 0<br />
–<br />
u<br />
1<br />
sCj<br />
= – u ( – 1<br />
|r n |<br />
+ sCj )<br />
s²LCj + s (RCj – L<br />
|r n | ) + 1 – R<br />
|r n | = 0 (4.1/8)<br />
a b c<br />
Als Lösung der quadratischen Gleichung (4.1/8) für den Schwingungsfall erhält man mit den<br />
Abkürzungen a = LCj, b = [RCj – L ] |r n | und c = ⎝ ⎜⎛ 1 – R<br />
|r ⎠ ⎟⎞<br />
n |<br />
in Analogie zu (4.1/5)<br />
die Gl. (4.1/5).<br />
analog zu (4.1/5) + Bsp. 2.6.1/1 (TF) für den Schwingungsfall:<br />
s²a + s b + c = 0<br />
s² + s b a + c a = 0<br />
s 1,2 = – ⎜ ⎛ b<br />
⎝ 2a ⎠ ⎟⎞ ± ⎝ ⎜⎛ b<br />
2a⎠ ⎟⎞ ² c –<br />
a = – b 2a ± j<br />
1<br />
s 1,2 = –<br />
2LCj ⎝ ⎜⎛ RCj – L<br />
|r ⎠ ⎟⎞<br />
n |<br />
± j<br />
c<br />
a – ⎝ ⎜⎛<br />
b<br />
2a⎠ ⎟⎞ ²<br />
1<br />
LCj ⎝ ⎜⎛ 1 – R<br />
|r ⎠ ⎟⎞ 1<br />
n |<br />
–<br />
4(LCj)² ⎝ ⎜⎛ RCj – L<br />
|r ⎠ ⎟⎞<br />
²<br />
n | = – δ ± jωe (4.1/9)<br />
δ ω 0<br />
2<br />
δ 2<br />
Schwingung nur möglich für ω 0 > 0 => ω 0 ² = 1<br />
LCj ⎝ ⎜⎛ 1 – R<br />
|r ⎠ ⎟⎞<br />
n |<br />
> 0<br />
=> 1 – R<br />
|r n | > 0 => |r n| – R > 0 => |r n | > R => R < |r n | (4.1/10)<br />
Nach (4.1/9) tritt nur bei positivem Radikand eine Schwingung auf. Hierfür ist zu fordern, dass<br />
(1 – R/|r n |) > 0, d.h. es gilt Ungleichung (4.1/10).<br />
1<br />
Anschwingen nur möglich für δ =<br />
2LCj ⎝ ⎜⎛ RCj – L<br />
|r ⎠ ⎟⎞<br />
n |<br />
< 0<br />
=> RCj – L<br />
|r n | < 0 => R < L<br />
|r n |<br />
(4.1/11)<br />
Cj<br />
4
Anderseits ist für ein Anschwingen aus (4.1/9) entnehmbar, dass (RCj – L/|r n |) < 0 sein muss, d.h<br />
dafür gilt die Ungleichung (4.1/11).<br />
Die Aussage über R nach (4.1/10) wird in [51] <strong>als</strong> Gleichstrom-Stabilitätsbedingung<br />
bezeichnet. Die Gleichstrom-Lastgerade R muss in jedem Fall steiler verlaufen <strong>als</strong> die Flanke der<br />
fallenden Tunneldioden-Kennlinie zwischen H und T, sonst ergibt sich kein stabiler Arbeitspunkt<br />
(Bild 4.1-2a).<br />
Die Aussage über R nach (4.1/11) ist in [51] <strong>als</strong> Wechselstrom-Stabilitätsbedingung bezeichnet.<br />
Beim Nichterfüllen dieser Bedingung würde statt einer dauerhaften Schwingung lediglich eine<br />
gedämpfte Schwingung auftreten.<br />
Nach dem Anschwingen (zunächst δ < 0) wird auf Grund der Kennlinien-Krümmung die<br />
Entdämpfung abnehmen, d.h r n kleiner werden, so dass sich im stationären Zustand eine<br />
ungedämpfte Schwingung (δ ≈ 0) entsprechend (4.1/9) einstellt.<br />
Dann berechnet sich die Schwingfrequenz ƒ 0 des Tunneldioden-Oszillators mit der Gl. (4.1/12).<br />
Ungedämpfte Schwingung (stationärer Schwingungszustand):<br />
=> δ = 0 => aus (4.1/9) ω e = ω 0 =<br />
1<br />
LCj ⎝ ⎜⎛ 1 – R<br />
|r ⎠ ⎟⎞ 1<br />
n |<br />
=> ƒ 0 =<br />
2π LCj<br />
1 – R<br />
|r n |<br />
(4.1/12)<br />
Aus (4.1/12) ist ersichtlich, wie die Frequenz der erzeugten Schwingung eines Tunneldioden-<br />
Oszillators durch die äußere Beschaltung beeinflusst wird. Der Tunneldioden-Oszillator wurde<br />
hier <strong>als</strong> Beispiel eines einfachen Zweipol-Oszillators vorgestellt, da er rechnerisch einfach<br />
verfolgbar ist und dabei interessante Grundzusammenhänge aufzeigt.<br />
Tunneldioden sind zwar bis in den GHz-Bereich einsetzbar, allerdings ist auf Grund der<br />
niedrigen Betriebsspannung die Leistung auf einige mW begrenzt, was die Anwendung sehr<br />
einschränkt. Eine Oszillator-Schaltung, bei der eine Tunneldiode im GHz-Bereich in einem<br />
koaxialen Resonator eingesetzt wird und dessen Abstimmung mit einem Kurzschluss-Schieber<br />
erfolgt, ist in [51] dargestellt.<br />
Höhere Ausgangsleistungen bei Zweipol-Oszillatoren im Mikrowellenbereich lassen sich mit<br />
Gunn-Elementen, Impatt-Dioden und Laufzeit-Röhren erreichen [44, 51].<br />
Die Impatt-Diode z.B. wird im Sperrbereich bis kurz vor den Avalanche-Effekt vorgespannt.<br />
Eine überlagerte Wechselspannung u (mit der Frequenz ƒ) löst Stoßionisationslawinen aus.<br />
Infolge der endlichen Laufzeit t D der Ladungsträger durch die Driftzone (abhängig von der<br />
Driftzonenweite w und der Sättigungsdriftgeschwindigkeit v S ) tritt eine Phasenverschiebung<br />
φ = 2 π ƒ t D im äußeren Kreis zwischen u (<strong>als</strong> Ursache) und Strom i auf, wodurch in einem<br />
bestimmten Frequenzbereich ein negativer Realteil der Diodenimpedanz entstehen kann. D.h. die<br />
Impatt-Diode ist ebenfalls zur Entdämpfung in Resonatoren bei Mikrowellen-Oszillatoren<br />
einsetzbar und da die Durchbruchsspannungen bei ca. 10 V...100 V liegen, sind auch wesentlich<br />
höhere Wechselleistungen <strong>als</strong> bei der Tunneldiode zu erwarten. Als Leistungen sind hiermit<br />
momentan erreichbar bis ca. 10 W bei 10 GHz, einige Watt bei 50 GHz und ca. 0,1 W<br />
bei 100 GHz. Für Zweipol-Oszillatoren mit Leistungen (Dauerleistungen) bis in den kW-Bereich<br />
und bei Frequenzen bis zu mehreren 100 GHz werden Laufzeit-Röhren (z.B. Magnetrons und<br />
Gyrotrons) verwendet [51].<br />
5
4.2 Grundprinzip eines Vierpol-Oszillators<br />
Vor der Darstellung einzelner Transistor-Oszillatoren sei zunächst die allgemeine Betrachtung<br />
eines Vierpol-Oszillators vorangestellt. Hiernach kann man sich einen Vierpol-Oszillator aus<br />
einem Verstärker-Vierpol (aktiv) und einem Rückkopplungs-Vierpol (passiv) zusammengesetzt<br />
denken (Bild 4.2-1a).<br />
1<br />
U 1`<br />
3<br />
1<br />
2<br />
3<br />
U 1 V<br />
U K<br />
U<br />
2<br />
3<br />
a)<br />
Verstärkervierpol<br />
Rückkopplungsvierpol<br />
U 1<br />
V U 2<br />
K U = U<br />
Z einK<br />
Z ein V<br />
3 1<br />
b)<br />
Bild 4.2-1<br />
Allgemeine Darstellung eines Vierpol-Oszillators<br />
a) Kettenschaltung aus Verstärker-Vierpol und Rückkoppel-Vierpol<br />
b) Nachbildung der Belastungs-Einflüsse (offene Kette)<br />
Die Verstärkung V desVerstärker-Vierpols berechnet sich mit Gl.(4.2/1).<br />
V = U 2<br />
U 1<br />
(4.2/1)<br />
Mit der Gl.(4.2/2) lässt sich der Rückkopplungsfaktor K des Rückkopplungs-Vierpols ermitteln.<br />
K = U 3<br />
U<br />
(4.2/2)<br />
2<br />
Aus Bild (4.2-1a): ∑ U = 0 = U `1 + U 3 – U 1<br />
U `1 = U 1 – U 3 = U 1 – K U 2 (4.2/3)<br />
aus (4.2/2)<br />
U 3<br />
U 1<br />
= U 3<br />
U 2<br />
U 2<br />
U 1<br />
= K V (4.2/4)<br />
aus (4.2/2) K V aus (4.2/1)<br />
Ein Umlauf in der Anordnung nach Bild 4.2-1a mit (4.2/2) ergibt die Gl.(4.2/3).<br />
Wenn nach (4.2/3) U `1 = 0 ist, d.h. die rückgeführte Spannung U 3 in Betrag und Phase mit der<br />
gedachten Eingangsspannung U 1 übereinstimmt, dürfen die Klemmen 1-3 verbunden werden. In<br />
diesem Falle wird ein stationärer Zustand aufrechterhalten. Es tritt <strong>als</strong>o eine Ausgangsspannung<br />
U 2 auf, ohne dass eine externe Eingangswechselspannung U 1 angelegt wurde. Somit ist durch<br />
6
die vorliegende Rückkopplung auf den Eingang ein Oszillator entstanden. Betrachtet man das<br />
Verhältnis in (4.2/4), so gilt bei Verbindung der Punkte 1 und 3 mit U `1= 0 bzw. U 1 = U 3<br />
die für eine Schwingschaltung wichtige Beziehung (4.2/5).<br />
U `1 = 0 => Kurzschluss von 1 und 3 => U 1 = U 3 in (4.2/4) eingesetzt:<br />
U 3<br />
1<br />
U 3<br />
= K V => K V = 1 (4.2/5)<br />
K = | K | e jφ k<br />
, V = | V | e jφ v<br />
| K | | V | e j(φ k + φ v ) = 1<br />
Die Schwingbedingung in Gl.(4.2/5) stellt eine komplexe Gleichung dar, sie enthält eine<br />
Betrags- und Phasenbedingung ( Gl.(4.2/6)).<br />
| K | | V | = 1<br />
φk + φv = 0 (bzw. 360°) (4.2/6)<br />
Diese beiden Gleichungen sind die Grundbeziehungen für das Verständnis eines Vierpol-<br />
Oszillators. Liegt z.B. bei einem Verstärker (Emitter-Schaltung) eine Phasendrehung<br />
von φ V = 180° vor, so muss der Rückkopplungs-Vierpol ebenfalls φ K = 180° drehen, um eine<br />
Gleichphasigkeit am Verstärker-Eingang (<strong>als</strong>o 360° bzw. 0°) zu erreichen. Der Betrag des<br />
Rückkoppelfaktors müsste nach (4.2/6) | K | = 1/| V | sein. In der Regel wird man aber | K | etwas<br />
größer <strong>als</strong> 1/| V | wählen, um beim Einschalten der Gleichspannung ein sicheres Anschwingen<br />
des Oszillators aus dem Rauschen heraus zu gewährleisten. Schematisiert lassen sich folgende<br />
Schritte für die Analyse eines Vierpol-Oszillators angeben:<br />
1) Man trenne den Rückkopplungskreis der Oszillator-Schaltung an geeigneter Stelle auf (d.h.<br />
man öffne die Kette).<br />
2) Man berücksichtige hierbei die Belastungsverhältnisse der Vierpole dadurch, dass man sie<br />
entsprechend Bild 4.2-1b näherungsweise nachbildet. Hierbei ist der Verstärker-Ausgang mit der<br />
Eingangsimpedanz Z einK des Rückkoppel-Vierpols und der Ausgang des Rückkoppel-Vierpols mit<br />
der Eingangsimpedanz Z einV des Verstärkers belastet.<br />
3) Man berechne V = U 2 /U 1 und K = U 3 /U 2 der offenen Kette. Hierbei gelten folgende<br />
Abhängigkeiten:<br />
V = ƒ (Verstärkerparameter, Z einK )<br />
K = ƒ (Rückkopplungsparameter, Z einV ) (4.2/7)<br />
4) Man gewinne aus der Schwingbedingung (4.2/6) die gewünschten Aussagen über | K |, φ und<br />
die Schwingfrequenz ƒ 0 der Schaltung [153].<br />
4.3 Einige Grundtypen von Vierpol-Oszillatoren<br />
4.3.1 RC-Oszillatoren<br />
In tieferen Frequenzbereichen bis zu einigen MHz verwendet man oft RC-Oszillatoren, da hier<br />
Spulen meist relativ groß und teuer sind. Insbesondere bei Einsatz von Operationsverstärkern<br />
und Brückenschaltungen lassen sich auch hier relativ stabile Oszillatoren erreichen.<br />
a) Oszillator mit RC-Phasenschieber-Kette<br />
In Bild 4.3.1-1a ist eine einfache Grundschaltung betrachtet. Der Verstärker-Vierpol ist hier eine<br />
Emitter-Schaltung. Bei Annahme einer Phasendrehung von 180° zwischen Basis und Kollektor<br />
ist nach (4.2/6) auch bei Rückkopplungs-Vierpol eine Phasendrehung von 180° erforderlich. Um<br />
diese Phasendrehung zu erreichen, werden bei der RC-Phasenschieber-Kette 3 Glieder benötigt<br />
7
(auf Grund der gegenseitigen Belastung der RC-Glieder !). Der Widerstand R E soll nur eine<br />
gleichstrommäßige Arbeitspunkt-Stabilisierung bewirken. Zur Vereinfachung seien folgende<br />
Annahmen getroffen:<br />
Die Ein- und Ausgangsimpedanzen des Verstärkers seien reell (Gl. 4.3.1/1), wobei R 1T ≈ 1/Y 11<br />
den Transistor-Eingangswiderstand und R 2T ≈ 1/Y 22 den Transistor-Ausgangswiderstand bei<br />
Vernachlässigung der Transistor-Rückwirkung (Y 12 ) darstellt.<br />
Annahme: reelle Ein- und Ausgangsimpedanzen des Verstärkers<br />
R 1T ^= Transistoreingangswiderstand<br />
R 2T ^= Transistorausgangswiderstand<br />
aus Bild (4.3.1-1a)<br />
Z einV = R ein = R 1 || R 2 || R 1T<br />
Z ausV = R aus = R 2T || R C (4.3.1/1)<br />
+U B<br />
R<br />
R<br />
1 c<br />
Z ein K<br />
C<br />
U<br />
2<br />
R<br />
C<br />
C<br />
Z ein V<br />
Z aus V<br />
U 1<br />
R R<br />
2 E<br />
C >><br />
R<br />
U 3<br />
C<br />
C<br />
C<br />
U 1<br />
Y 21<br />
U 1<br />
Y R<br />
22 c U 2<br />
R U B<br />
R U A<br />
R=R ein U 3<br />
Z ein K<br />
R aus<br />
Verstärkervierpol<br />
Rückkopplungsvierpol<br />
Bild 4.3.1-1<br />
Oszillator mit RC-Phasenschieber-Kette<br />
a) Schaltung<br />
b) Ersatzschaltung<br />
Um 3 gleiche CR-Glieder zu erhalten, wählt man R nach Gl. (4.3.1/2).<br />
symmetrischer Aufbau des Rückkopplungsvierpols => aus Bild (4.3.1-1b)<br />
R = ! R ein (4.3.1/2)<br />
Damit die Belastung des Verstärker-Ausgangswiderstandes R aus durch die Eingangsimpedanz Z einK<br />
des Rückkoppel-Vierpols gering bleibt, ist zu fordern die Ungleichung (4.3.1/3).<br />
8
Forderung: R aus 0:<br />
Z einK –> ∞<br />
ω –> ∞: Z einK = R || R || R = R 3<br />
in (4.3.1/3) eingesetzt: R aus R >> 3R aus (4.3.1/4)<br />
Zu einer Abschätzung von Z einK kann man durch folgende Überlegungen gelangen: bei ω –> 0<br />
geht Z einK –> ∞, während bei ω –> ∞ der kleinste Wert von Z einK , nämlich<br />
Z einK = R || R || R = R/3 auftritt. Man liegt <strong>als</strong>o nach (4.3.1/3) auf der sicheren Seite, wenn man R<br />
hochohmig genug wählt, <strong>als</strong>o die Ungleichung (4.3.1/4) gilt.<br />
Sollte sich diese Bedingung ungenügend realisieren lassen, könnte man notfalls zwischen<br />
Verstärkerausgang und Phasenschieber-Kette einen Emitterfolger <strong>als</strong> Impedanzwandler<br />
dazwischenschalten.<br />
Nach obigen Vorüberlegungen lässt sich der Oszillator mit Hilfe der vereinfachten<br />
Ersatzschaltung nach Bild 4.3.1-1b berechnen.<br />
aus Bild (4.3.1-1b) U 2 = – ұ 21 U 1 (R aus || Z einK )<br />
aus (4.3.1/3)<br />
R aus R aus || Z einK ≈ R aus<br />
=> U 2 ≈ – ұ 21 U 1 R aus<br />
V = U 2<br />
U 1<br />
≈ – ұ 21 R aus = – V 0 (4.3.1/5)<br />
mit V 0 = ұ 21 R aus (Leerlaufverstärkung)<br />
K = U 3<br />
U 2<br />
= U 3<br />
U A<br />
U A<br />
U B<br />
U B<br />
U 2<br />
U 3<br />
U A<br />
=<br />
R<br />
1<br />
R+<br />
jωC<br />
=<br />
RjωC<br />
1+jωCR = jωτ<br />
1+jωτ<br />
(4.3.1/6)<br />
mit τ = CR<br />
U A<br />
U B<br />
=<br />
R || (R +<br />
1<br />
jωC )<br />
1<br />
jωC + [R || (R+ 1<br />
=<br />
jωC )]<br />
1<br />
R (R +<br />
jωC )<br />
1<br />
R + R +<br />
jωC<br />
1<br />
=<br />
R (R +<br />
1<br />
jωC + jωC )<br />
1<br />
R + R +<br />
jωC<br />
R (1 + jωCR)<br />
1 + j2ωCR<br />
1 R (1 + jωCR)<br />
jωC<br />
+<br />
1 + j2ωCR<br />
U A<br />
U B<br />
=<br />
1 + j2ωτ<br />
jωCR<br />
R (1 + jωτ) jωτ<br />
+ R (1 + jωτ) jωτ =<br />
jωτ (1 + jωτ)<br />
1 + j2ωτ + jωτ + (jωτ)² = jωτ (1 + jωτ)<br />
1 – (ωτ)² + j3ωτ<br />
(4.3.1/7)<br />
9
U B<br />
U 2<br />
=<br />
R || {<br />
1<br />
jωC + [R || (R + 1<br />
)]} jωC<br />
1<br />
jωC + R || { 1<br />
jωC + [R || (R + 1<br />
1<br />
R (R +<br />
1<br />
R {<br />
jωC + jωC )<br />
1<br />
}<br />
R + R +<br />
jωC<br />
1<br />
R (R +<br />
1<br />
R +<br />
jωC + jωC )<br />
1<br />
R + R +<br />
)]}<br />
= jωC<br />
1<br />
jωC<br />
R (R +<br />
1<br />
R {<br />
jωC + jωC )<br />
1<br />
R + R +<br />
1<br />
jωC + jωC<br />
R (R +<br />
1<br />
R +<br />
jωC + R + R +<br />
1<br />
jωC )<br />
}<br />
1<br />
jωC<br />
U B<br />
U 2<br />
=<br />
1 R (1 + jωCR)<br />
R {<br />
jωC<br />
+ }<br />
1 + j2ωCR<br />
1 R (1 + jωCR)<br />
R +<br />
jωC<br />
+<br />
1 + j2ωCR<br />
1 R (1 + jωCR)<br />
jωC<br />
+ }<br />
1 + j2ωCR<br />
1 R (1 + jωCR)<br />
R +<br />
jωC<br />
+<br />
1 + j2ωCR<br />
R {<br />
1<br />
jωC +<br />
=<br />
R { 1 + j2ωτ<br />
jωC<br />
+ R (1 + jωτ)}<br />
1<br />
(R +<br />
jωC<br />
) (1 + j2ωτ) + R (1 + jωτ)<br />
R { 1 + j2ωτ<br />
1<br />
jωC +<br />
(R +<br />
+ R (1 + jωτ)}<br />
jωC<br />
1<br />
jωC<br />
) (1 + j2ωτ) + R (1 + jωτ)<br />
U B<br />
U 2<br />
=<br />
U B<br />
U 2<br />
=<br />
R { 1 + j2ωτ<br />
jωCR<br />
+ R (1 +jωτ)}<br />
jωτ<br />
1<br />
jωCR [(R+ 1<br />
1 + j2ωτ<br />
jωCR<br />
) (1 + j2ωτ) + R (1 + jωτ)] + R{<br />
jωCR<br />
+ R (1 + jωτ)} jωτ<br />
1 + j2ωτ + jωτ (1 + jωτ)<br />
jωτ<br />
(1 + 1<br />
jωτ ) (1 + j2ωτ) + (1 + jωτ) +1 + j2ωτ + jωτ (1 + jωτ) jωτ<br />
U B<br />
jωτ (1 + j2ωτ) + (jωτ)² (1 + jωτ)<br />
U<br />
=<br />
2 (jωτ + 1) (1 + j2ωτ) + jωτ (1 + jωτ) + jωτ (1 + j2ωτ) + (jωτ)² (1 + jωτ)<br />
U B<br />
jωτ [1 + j2ωτ + jωτ + (jωτ)²]<br />
U<br />
=<br />
2 jωτ – 2 (ωτ)² + 1 + j2ωτ + jωτ – (ωτ)² + jωτ – 2 (ωτ)² – (ωτ)² – jωτ (ωτ)²<br />
U B jωτ [1 – (ωτ)² + j3ωτ]<br />
U<br />
=<br />
2 1 – 6 (ωτ)² + j5ωτ – jωτ (ωτ)²<br />
(4.3.1/8)<br />
(4.3.1/6) bis (4.3.1/8) in K<br />
10
K =<br />
jωτ<br />
1 + jωτ<br />
jωτ (1 + jωτ)<br />
1 – (ωτ)² + j3ωτ<br />
jωτ [1 – (ωτ)² + j3ωτ]<br />
1 – 6 (ωτ)² + j5ωτ – jωτ (ωτ)² = (jωτ) 3<br />
1 – 6 (ωτ)² + j5ωτ – jωτ (ωτ)²<br />
1<br />
K<br />
=<br />
1 – 6 (ωτ)² + j5ωτ – jωτ (ωτ)²<br />
– jωτ (ωτ)²<br />
= 1 –<br />
5<br />
(ωτ)² + j ( 1<br />
ωτ (ωτ)²<br />
– 6) (4.3.1/9)<br />
Aus der Schwingbedingung (4.2/5) erhält man die Gl.(4.3.1/10).<br />
aus (4.2/5) V K = 1 => V = – V 0 = 1 K = 1 – 5<br />
(ωτ)² + j ( 1<br />
ωτ (ωτ)²<br />
– 6) (4.3.1/10)<br />
aus (4.3.1/5) aus (4.3.1/9)<br />
aus (4.3.1/10) Imaginäranteile: 0 =<br />
Im{ 1 K } ! = 0<br />
2πƒ 0 RC = 1 6<br />
Schwingbedingung<br />
=> ƒ 0 =<br />
1<br />
2π 6 RC<br />
1<br />
(ω 0 τ)² – 6 => ω 0τ = 1 6 => ω 0 =<br />
(4.3.1/11b)<br />
1<br />
6 τ<br />
(4.3.1/11a)<br />
Die Schwingfrequenz ƒ 0 des Oszillators berechnet sich mit Gl.(4.3.1/11b).<br />
aus (4.3.1/10) –V 0 | ω0<br />
= 1 –<br />
5<br />
(ω 0 τ)² = 1 – 5<br />
1<br />
(<br />
6 τ/<br />
τ/) ² = 1 – 5 1<br />
6<br />
= 1 – 30 = –29<br />
Re{ 1 K }<br />
aus (4.3.1/11a)<br />
V 0 | ω0<br />
= 29 (4.3.1/12)<br />
Aus dem Realteil der Gl.(4.3.1/10) gewinnt man bei ω 0 (Im{ 1 K<br />
} = 0 ) die Amplitudenaussage in<br />
Gl.(4.3.1/12), d.h. zum Anschwingen des Oszillators muss die Verstärkung mindestens V 0 = 29<br />
betragen.<br />
Abschließend sei noch angemerkt, dass der gleiche Oszillator natürlich auch mit einem<br />
invertierenden Operationsverstärker (statt des Transistors) aufbaubar ist, wobei die Bedingungen<br />
nach (4.3.1/1) und (4.3.1/4) auf Grund der idealeren Verhältnisse beim Operationsverstärker<br />
einfacher zu realisieren sind.<br />
Von der Steilheit des Phasenverlaufes φ(ω) des frequenzbestimmenden Netzwerkes in der<br />
Gegend der Schwingfrequenz hängt in hohem Maße die Frequenzstabilität eines Oszillators ab.<br />
Tritt nämlich beim Verstärker infolge einer Störung eine Phasendrehung Δφ V auf, so muss diese<br />
auf Grund der Schwingbedingung (4.2/6) in der geschlossenen Schleife durch eine<br />
Phasenänderung Δφ K = – Δφ V des Rückkoppel-Vierpols ausgeglichen werden. Die hierdurch<br />
bedingte Frequenzänderung ist dann geringer, d.h. der Oszillator stabiler, wenn die<br />
Phasensteilheit groß ist. Bessere Phasensteilheiten <strong>als</strong> bei dem bisher betrachteten Oszillator<br />
erhält man im unteren Frequenzbereich durch Verwendung einer Brückenschaltung <strong>als</strong><br />
frequenzbestimmendes Netzwerk.<br />
11
) Wien-Brücken-Oszillator<br />
Die Prinzip-Schaltung eines Wien-Brücken-Oszillators ist in Bild 4.3.1-2a dargestellt. Für den<br />
nichtinvertierenden Verstärker (z.B. einen Operationsverstärker) sind folgende Annahmen<br />
getroffen:<br />
- die Leerlaufspannungs-Verstärkung V 0 sei positiv und reell,<br />
- Eingangswiderstand R ein und Ausgangswiderstand R aus seien ebenfalls reell;<br />
- R ein sei unabhängig von der Last am Ausgang des Verstärkers.<br />
Mit diesen Annahmen lässt sich die in Bild 4.3.1-2b dargestellte Ersatzschaltung angeben.<br />
R ein R aus<br />
U 1<br />
(nicht invertier.)<br />
U 2 U 3<br />
V 0<br />
R 1<br />
C1<br />
R 2<br />
C 2<br />
a)<br />
= R 1`<br />
= `<br />
R R C 1 aus 1<br />
`<br />
C 2<br />
R 2<br />
U 1 V 0 U 1 U 2 U 2 U 3<br />
R 2<br />
R ein<br />
b)<br />
Bild 4.3.1-2<br />
Verstärkervierpol<br />
Wien-Brücken-Oszillator<br />
a) Schaltung<br />
b) Ersatzschaltung<br />
Rückkoppelvierpol<br />
Zusammenfassung<br />
R`1 = R 1 + R aus<br />
R`2 = R 2 || R ein = R 2 R ein<br />
R 2 + R ein<br />
(4.3.1/13)<br />
Aus Bild 4.3.1-2b für Rückkopplungsnetzwerk<br />
1<br />
K = U ұ<br />
3<br />
U 2 ` = 2<br />
Z 1 + 1 ұ<br />
2<br />
1<br />
=<br />
1 + Z 1<br />
ұ<br />
2<br />
1<br />
mit Z 1 = R`1 +<br />
jωC<br />
und ұ = 1<br />
2<br />
1 R`2<br />
+ jωC 2<br />
12
1<br />
K =<br />
1<br />
1 + (R`1 +<br />
jωC 1<br />
) ( 1 + jωC 2 ) = 1<br />
1 + R`1 + C 2<br />
1<br />
R`2<br />
R`2 C<br />
+ j (ωC 2 R`1 – ) (4.3.1/14)<br />
1 ωC 1 R`2<br />
Der Rückkopplungsvierpol lässt sich mit Gl.(4.3.1/14) berechnen.<br />
aus Bild 4.3.1-2b für Verstärkungsvierpol<br />
V = U 2`<br />
U<br />
= V 0 U 1<br />
1 U<br />
= V 0<br />
1<br />
Aus Anschwingbedingung (4.2/5) K V = 1 => V = V 0 = 1 K<br />
=> V 0 = 1 K = 1 + R 1`<br />
R 2` + C 2<br />
1<br />
C<br />
+ j (ωC 2 R<br />
1<br />
1`–<br />
ωC 1 R 2`) (4.3.1/15)<br />
Realteil von (4.3.1/15), Amplitudenbedingung<br />
Imaginärteil von (4.3.1/15), Schwingfrequenz 0 = ω 0 C 2 R 1` –<br />
V 0 = 1 + R 1`<br />
R 2` + C 2<br />
C 1<br />
(4.3.1/16)<br />
1<br />
ω 0 C 1 R 2`<br />
1<br />
ω 0 C 2 R 1` =<br />
ω 0 C 1 R 2`<br />
2 1<br />
ω 0 =<br />
C 1 R 1`C 2 R 2`<br />
1<br />
ƒ 0 =<br />
(4.3.1/17)<br />
2π C 1 R 1`C 2 R 2`<br />
Zur Erfüllung der komplexen Gleichung (4.3.1/15) muss <strong>als</strong> Amplitudenbedingung die<br />
Gl.(4.3.1/16) gelten, während der Imaginärteil von (4.3.1/15) bei ω = ω 0 verschwinden muss,<br />
hieraus erhält man die Schwingfrequenz ƒ 0 des Oszillators (Gl.(4.3.1/17)).<br />
4.3.2 LC-Oszillatoren<br />
Ein LC-Oszillator besteht praktisch aus einem Selektivverstärker, von dessen Ausgang mit Hilfe<br />
eines geeigneten passiven Vierpols Signalanteile auf den Verstärker-Eingang im Sinne einer<br />
Mitkopplung rückgekoppelt werden.<br />
Diese Rückkopplung kann z.B. transformatorisch oder durch induktive bzw. kapazitive Teilung<br />
erfolgen. Nachstehend werden die wichtigsten LC-Oszillator-Schaltungen betrachtet. Um zu<br />
einer möglichst anschaulichen Darstellung der verschiedenen Oszillator-Grundtypen zu<br />
kommen, wird zunächst bewusst auf die verallgemeinerte Darstellung mit π-Ersatzbild und<br />
komplexen Y-Parametern verzichtet und statt dessen sehr einfache Ersatzbilder angenommen.<br />
Dies ist natürlich nur für tiefere Frequenzbereiche zulässig, wo die Blindanteile noch relativ<br />
gering sind und die Schwingfrequenz ƒ 0 sehr klein gegenüber der Transitfrequenz ƒ T des<br />
Transistors ist.<br />
a) Meißner-Schaltung<br />
Die Meißner-Schaltung ist eine der ältesten Oszillator-Schaltungen. Den recht einfachen Aufbau<br />
zeigt Bild 4.3.2-1a. Vom Ausgang des Selektivverstärkers wird durch einen Umkehrübertrager<br />
die notwendige Mitkopplung am Verstärker-Eingang erreicht. Die Punkte an den Wicklungen<br />
kennzeichnen die (gleiche) Phasenlage (z.B. Punkt = Wicklungsanfang). Bild 4.3.2-1b zeigt das<br />
wechselmäßige Ersatzschaltbild der Meißner-Schaltung. Vereinfachend sind<br />
Rückwirkungsfreiheit des Transistors (Y 12 ≈ 0), ein Kleinsignal-Ersatzbild mit reellen<br />
Parametern, sowie ein idealisierter Übertrager mit dem Übersetzungsverhältnis ü = n 1 / n 2 > 1<br />
angenommen. Die Ersatzgrößen in Bild 4.3.2-1b haben folgenden Zusammenhang mit den Y-<br />
Parametern (vgl. mit [15]):<br />
13
BE = 1 Y 11<br />
; r CE = 1 Y 22<br />
und die Steilheit S = Y 21<br />
+U B<br />
R 1<br />
C 1<br />
n 2 L, n 1<br />
C<br />
C2<br />
U<br />
U 1<br />
2<br />
a)<br />
B<br />
C<br />
n 1 n 2<br />
U 1<br />
r BE<br />
SU 1<br />
r CE<br />
U 2<br />
C<br />
R P<br />
L<br />
U K<br />
b)<br />
E<br />
E<br />
Bild 4.3.2-1<br />
Z Pges<br />
= 1 Y Pges<br />
Meißner-Oszillator<br />
a) Oszillator in Emitterschaltung<br />
b) Ersatzschaltbild zu a)<br />
aus Bild 4.3.2-1b U 2 = – S U 1 Z pges = – S U 1<br />
1<br />
ұ<br />
pges<br />
(4.3.2/1)<br />
Die Ausgangsspannung U 2 in Bild 4.3.2-1b berechnet sich mit der Gl.(4.3.2/1) und damit die<br />
Verstärkung V mit der Gl.(4.3.2/1a).<br />
V = U 2<br />
U<br />
= – S U 1 1<br />
1 U<br />
= – S<br />
(4.3.2/1a)<br />
1 ұ ұ<br />
pges pges<br />
Der Eingangswiderstand r BE wird auf die Kollektorseite hochtransformiert und bedämpft dabei<br />
mit dem Wert r`BE den Schwingkreis. Das Übersetzungsverhältnis ü wird festgelegt mit der<br />
Gl.(4.3.2/2).<br />
ü = n 1<br />
n 2<br />
> 1 (4.3.2/2)<br />
=> r`BE = r BE ( n 1<br />
n 2<br />
) ² = r BE ü 2<br />
(4.3.2/2a)<br />
Den Gesamtleitwert auf der Kollektorseite erhält man dann mit der Gl.(4.3.2/3), wobei R P den<br />
Verlustwiderstand des Parallelschwingkreises mit der Güte Q P darstellt (Gl.(4.3.2/3a)).<br />
ұ<br />
pges = 1<br />
r<br />
+ 1<br />
CE R<br />
+ 1 + j (ωC – 1 )<br />
P r`BE ωL (4.3.2/3)<br />
analog zu (2.3.1/6b) R P = Q P ω 0 L (4.3.2/3a)<br />
14
Mit der rückgekoppelten Spannung U K in Gl.(4.3.2/4) erhält man den<br />
Rückkoppelfaktor K (Gl.(4.3.2/4a)).<br />
U K = – n 2<br />
n<br />
U 2 = – U 2<br />
1 ü<br />
K = U K<br />
U<br />
= – U 2 1<br />
2 ü U<br />
= – 1<br />
2 ü<br />
(4.3.2/4)<br />
(4.3.2/4a)<br />
aus (4.3.2/4)<br />
Aus der Schwingbedingung folgt mit den Gl.(4.3.2/4a), (4.3.2/1a) und (4.3.2/3) die Gl.(4.3.2/5).<br />
K = 1 V<br />
– 1 ü = – ұ pges<br />
S<br />
= – 1 S [ 1<br />
r<br />
+ 1<br />
CE R<br />
+ 1 + j (ωC – 1<br />
P r`BE ωL ) ] (4.3.2/5)<br />
aus (4.3.2/4a) aus (4.3.2/1a) aus (4.3.2/3)<br />
Ein Vergleich der Realteile in (4.3.2/5) liefert die Amplitudenbedingung (4.3.2/6).<br />
Realteil von (4.3.2/5), Amplitudenbedingung – 1 ü = – 1 S ( 1<br />
r<br />
+ 1<br />
CE R<br />
+ 1 )<br />
P r`BE<br />
1<br />
ü = 1 S ( 1<br />
r<br />
+ 1<br />
CE R<br />
+ 1<br />
P<br />
r`BE<br />
) (4.3.2/6)<br />
Da nach (4.3.2/5) der Imaginärteil in der Schwingbedingung null sein muss, folgt hieraus, dass<br />
die Schwingfrequenz des Oszillators gleich der Resonanzfrequenz des Selektivverstärkers<br />
(Gl.(4.3.2/7)) ist.<br />
Imaginärteil von (4.3.2/5), Schwingfrequenz 0 = 1 S (ω 0C – 1<br />
ω 0 L ) , ω 0C = 1<br />
ω 0 L<br />
ω<br />
² 1<br />
0 =<br />
LC => ƒ 1<br />
0 =<br />
(4.3.2/7)<br />
2π LC<br />
Der Meißner-Oszillator schwingt <strong>als</strong>o auf der Resonanzfrequenz ƒ 0 . Nach dem Einschalten der<br />
Betriebsspannung U B soll der Oszillator sicher anschwingen.<br />
Ein exponentieller Anstieg der Schwingamplitude erfolgt solange, bis auf Grund von<br />
Nichtlinearitäten (z.B. geringe Abflachung der Steuerkennlinie) die Steilheit S und damit die<br />
Verstärkung V 0 abnimmt. Dann schwingt der Oszillator mit konstanter Amplitude und es gilt<br />
K V = 1. Besser sind sicher schaltungsmäßig vorgesehene Maßnahmen für eine Amplituden-<br />
Stabilisierung. So sollte man auf jeden Fall eine gleichstrommäßige Gegenkopplung zur<br />
Arbeitspunktstabilisierung vorsehen, eventuell auch eine geringe wechselmäßige<br />
Stromgegenkopplung zur Verringerung von Verstärkung und Klirrfaktor.<br />
Auch ein zu großes Übersetzungsverhältnis ü sollte man vermeiden, da sich dies ungünstig auf<br />
den Klirrfaktor der Oszillatorschwingung auswirkt.<br />
15
) Hartley-Oszillator<br />
Beim Hartley-Oszillator wird der Schwingkreis eines Resonanz-Verstärkers induktiv angezapft<br />
(induktive Dreipunkt-Schaltung). Bild 4.3.2-2a zeigt eine Ausführung in Basisschaltung. Die<br />
abgegriffene Teilspannung wird <strong>als</strong> Rückkoppel-Signal dem Verstärker-Eingang (hier Emitter)<br />
zugeführt.<br />
a)<br />
+U B<br />
+U B<br />
n1<br />
R 2<br />
C L<br />
n 2<br />
R E R 1<br />
C >><br />
C >><br />
E<br />
L n 2<br />
R E r EB SU 1<br />
r CB R C P U 2<br />
U 1<br />
–<br />
n 1<br />
U K<br />
b)<br />
B<br />
re<br />
B<br />
Z P<br />
= 1<br />
Y P<br />
Bild 4.3.2-2 Hartley-Oszillator<br />
a) Schaltung<br />
b) Ersatzschaltung<br />
In Bild 4.3.2-2b ist das wechselstrommäßige Ersatzschalbild des Hartley-Oszillators dargestellt,<br />
hier mit den Parametern der Basis-Schaltung. Aufgrund des höheren Eingangsstromes ist der<br />
Eingangswiderstand der Basisschaltung wesentlich niederohmiger <strong>als</strong> bei der Emitter-Schaltung.<br />
Den nicht invertierenden Charakter der Basis-Schaltung berücksichtigt man bei tieferen<br />
Frequenzen durch das negative Vorzeichen der reellen Steilheit, bei höheren Frequenzen rechnet<br />
man dann allgemein mit einer komplexen Steilheit.<br />
Für die Ersatzgrößen in Bild 4.3.2-2b gilt mit dem Stromverstärkungsfaktor β >> 1<br />
r EB = 1<br />
Y 11b<br />
≈ r EB<br />
β ;<br />
und r CB = 1<br />
Y 22b<br />
>> r CE .<br />
Y 21b = – Y 21e = – S<br />
Der Rückkopplungsfaktor K lässt sich mit der Gl.(4.3.2/8) und die Ausgangsspannung U 2 mit der<br />
Gl.(4.3.2/9) berechnen.<br />
Aus Bild 4.3.2-2b<br />
K = U K<br />
U 2<br />
=<br />
n 1<br />
n 1 + n 2<br />
= 1 ü`<br />
(4.3.2/8)<br />
U 2 = – ( – S U 1 ) Z p = S U 1 1 ұ<br />
p<br />
(4.3.2/9)<br />
16
V = U 2<br />
U 1<br />
= S U 1 1 ұ<br />
p<br />
1<br />
U 1<br />
= S ұ<br />
p<br />
(4.3.2/10)<br />
aus (4.3.2/9)<br />
Der Schwingkreis wird wieder durch den transformierten Eingangswiderstand r`e belastet<br />
(Gl.(4.3.2/11)).<br />
ұ<br />
p = 1<br />
r CB<br />
+<br />
r e = R E || r EB = R E r EB<br />
R E + r EB<br />
R E >> r EB => r e ≈ r EB<br />
r`e= ü`² r e ≈ ü`² r EB (4.3.2/11)<br />
1<br />
ü`² r<br />
+ 1<br />
EB R<br />
+ j (ωC – 1<br />
p ωL ) (4.3.2/12)<br />
Den Gesamtleitwert ұ p erhält man mit der Gl.(4.3.2/12), wobei R P den Verlustwiderstand des<br />
Parallelschwingkreises mit der Güte Q P darstellt (Gl.(4.3.2/13)).<br />
analog zu (2.3.1/6b) R P = Q P ω 0 L (4.3.2/13)<br />
Aus der Schwingbedingung folgt mit den Gl.(4.3.2/8), (4.3.2/10) und (4.3.2/12) die<br />
Gl.(4.3.2/14).<br />
K = 1 V<br />
1 ұ ü` = P<br />
S = 1 S [ 1 1<br />
r<br />
+<br />
CB ü`² r<br />
+ 1<br />
EB R<br />
+ j (ωC – 1<br />
P ωL<br />
)] (4.3.2/14)<br />
aus (4.3.2/8) aus (4.3.2/10) aus (4.3.2/12)<br />
Ein Vergleich der Realteile in (4.3.2/14) liefert die Amplitudenbedingung (4.3.2/15).<br />
1<br />
Realteil von (4.3.2/14), Amplitudenbedingung<br />
ü` = 1 S [ 1 1<br />
r<br />
+<br />
CB ü`² r<br />
+ 1<br />
EB R<br />
] (4.3.2/15)<br />
P<br />
Da nach (4.3.2/14) der Imaginärteil in der Schwingbedingung null sein muss, erhält man mit<br />
Gl.(4.3.2/16) die Schwing-(Resonanz)-Frequenz ƒ 0 des Hartley-Oszillators.<br />
Imaginärteil von (4.3.2/14), Schwingfrequenz 0 = 1 S ( ω 0C – 1<br />
ω 0 L )<br />
ω 0 C = 1<br />
ω 0 L<br />
ω 0<br />
² =<br />
1<br />
L C => ƒ 0 =<br />
1<br />
2π L C<br />
(4.3.2/16)<br />
c) Colpitts-Oszillator<br />
Beim Colpitts-Oszillator wird aus dem Schwingkreis eines Selektiv-Verstärkers kapazitiv ein<br />
Rückkoppelsignal ausgekoppelt und auf den Verstärker-Eingang rückgeführt (kapazitive<br />
Dreipunkt-Schaltung). Bild 4.3.2-3a zeigt eine typische Ausführung in Emitter-Schaltung und<br />
Bild 4.3.2-3b das dazugehörige wechselstrommäßige Ersatzschaltbild. Die Kondensatoren C»<br />
sind wieder <strong>als</strong> wechselstrommäßige Kurzschlüsse aufzufassen und daher im Ersatzbild nicht<br />
enthalten. Sie verhindern zwischen Kollektor und Basis einen gleichspannungsmäßigen<br />
Kurzschluss durch L und heben die wechselstrommäßige Strom-Gegenkopplung durch R E auf<br />
(nur Arbeitspunktstabilisierung).<br />
17
Zur rückgekoppelten Spannung (Bild 4.3.2-3b) gelangt man, wenn man den kapazitiven Teiler<br />
C 2 , C 1 <strong>als</strong> nahezu „unbelastet“ auffasst. Dann gilt für das Spannungsverhältnis die Gl.(4.3.2/17).<br />
1<br />
| U C1 | ωC 1<br />
| U C2 |<br />
≈<br />
1<br />
≈ C 2<br />
C<br />
(4.3.2/17)<br />
1<br />
ωC 2<br />
Die erforderliche Phasenumkehr von 180° wird dadurch erreicht, dass die Verbindung zwischen<br />
C 2 und C 1 an Masse gelegt ist (Punkt 2). Der Rückkoppelfaktor K ergibt sich mit Gl.(4.3.2/17a).<br />
K = U K<br />
U 2<br />
= –U C1<br />
U C2<br />
= – | U C1 |<br />
| U C2 |<br />
≈ – C 2<br />
C 1<br />
(4.3.2/17a)<br />
aus (4.3.2/17)<br />
U<br />
+<br />
B<br />
+<br />
U<br />
B<br />
1<br />
C >><br />
R<br />
C<br />
R<br />
2<br />
L<br />
2<br />
C<br />
2<br />
C<br />
1<br />
R<br />
1<br />
3<br />
R<br />
E<br />
C<br />
>><br />
a)<br />
U<br />
B<br />
1<br />
U C<br />
U<br />
R<br />
2<br />
B C<br />
1<br />
R ||<br />
1 R2<br />
r E S 1<br />
rC<br />
E<br />
2<br />
U<br />
C2<br />
re<br />
E<br />
r<br />
2<br />
U<br />
K<br />
2<br />
C<br />
1<br />
U<br />
C1<br />
U<br />
P<br />
R<br />
P<br />
L<br />
b)<br />
3<br />
SU 1<br />
rC<br />
E R C<br />
r R`P<br />
è U 2<br />
c)<br />
Bild 4.3.2-3<br />
R P0<br />
Colpitts-Oszillator<br />
a) Schaltung<br />
b) Ersatzbild zu a)<br />
c) Ersatzbild zur Berechnung von V 0<br />
18
Auch im vorliegenden Fall ist aus dem Ersatzbild erkennbar, dass die Schwingfrequenz wieder<br />
mit der Resonanzfrequenz übereinstimmen muss. Dies führt auf schnellstem Wege zur<br />
Schwingfrequenz des Colpitts-Oszillators (Gl.(4.3.2/18)).<br />
C ges = C 1 C 2<br />
C 1 + C 2<br />
1<br />
ƒ 0 =<br />
(4.3.2/18)<br />
2π L C ges<br />
Die Amplitudenbedingung erhält man dann aus K (reell) und der Verstärkung V 0 bei ƒ 0 (d.h. dem<br />
Realteil von V). Die Berechnung von V 0 kann man mit dem etwas umgezeichneten Ersatzbild<br />
(Bild 4.3.2-3c) vornehmen, das die Transformation bezüglich der Klemmen C-E bei Resonanz<br />
berücksichtigt (vgl. Bild 4.3.2-3b). Hierin bedeutet R p` den transformierten Verlustwiderstand R p<br />
des Schwingkreises.<br />
Damit berechnet sich die Verstärkung V 0 bei der Resonanzfrequenz ƒ 0 mit Gl.(4.3.2/19).<br />
aus Bild 4.3.2-3c<br />
U 2 = – S U 1 R P0<br />
V 0 = U 2<br />
U 1<br />
| = – S R P0 = – S<br />
ƒ0<br />
G<br />
(4.3.2/19)<br />
P0<br />
mit G p0 = 1<br />
r<br />
+ 1<br />
CE R<br />
+ 1<br />
C R P` + 1<br />
r e`<br />
Ersetzt man die Spule L durch einen Reihenschwingkreis, dessen Reaktanz-Summe bei ƒ 0<br />
induktiv ist, erhält man einen Clapp-Oszillator, der eine recht gute Frequenzstabilität besitzt.<br />
+U B<br />
L<br />
R 2 >><br />
2<br />
C<br />
L<br />
L<br />
C`2 C 22<br />
a)<br />
C >><br />
R 1<br />
R E<br />
C<br />
1<br />
C<br />
b)<br />
C`1 C 11<br />
L<br />
C 2 C 22<br />
L<br />
C 2 C 22<br />
X K<br />
=^<br />
C 1 C 11<br />
c)<br />
C<br />
C 1 C 11<br />
C<br />
Bild 4.3.2-4 Clapp-Oszillator<br />
a) Schaltung<br />
b) Colpitts-Oszillator in Basisschaltung (Prinzip)<br />
c) Rückführung des Clapp-Oszillators auf Colpits-Oszillator<br />
19
Bei freischwingenden LC-Oszillatoren lässt sich eine Frequenzkonstanz von ƒ / ƒ 0 ≈ (0,1 ....1)<br />
×10 –3 erreichen. Ein sorgfältiger Oszillator-Aufbau (z.B. Arbeitspunktstabilisierung, gute<br />
Schirmung, lose Lastankopplung) wirkt sich hierbei günstig auf eine optimale Stabilität der<br />
Schwingfrequenz aus.<br />
Im Falle höherer Anforderungen hinsichtlich der Frequenzstabilität sind in Oszillator-<br />
Schaltungen Quarze <strong>als</strong> Resonatoren mit wesentlich besseren Gütewerten (Q ≈ 10 4 ....10 6 ) <strong>als</strong> bei<br />
üblichen LC-Kreisen (Q ≈ 30 ...300) einzusetzen [51, 12].<br />
4.3.3 Quarz-Oszillatoren<br />
Bei einem Schwingquarz wird der reziproke Piezzo-Effekt ausgenutzt, d.h. eine angelegte<br />
Wechselspannung regt den Quarz zu mechanischen Schwingungen an.<br />
Abhängig von der Schnittführung (bezogen auf die Kristallachsen) sowie von der Form<br />
(Scheiben oder Stäbe) sind Schwinger mit unterschiedlichen Eigenschaften herstellbar. So<br />
werden z.B. bei tieferen Frequenzen ( < 100 kHz) überwiegend Biegeschwinger <strong>als</strong><br />
Grundwellenquarze verwendet, d.h. der Quarz wird in der Oszillator-Schaltung in seiner<br />
Grundschwingung angeregt.<br />
Im Anwendungsbereich zwischen ca. 300 kHz und 25 MHz werden Quarze meist <strong>als</strong><br />
Dickenscherschwinger hergestellt und dabei <strong>als</strong> Grundwellenquarze betrieben.<br />
Für Anwendungsbereiche oberhalb 25 MHz verwendet man Dickenscherschwinger <strong>als</strong><br />
Oberwellenquarze. Hier wird der Quarz durch geeignete Anregung in der Oszillator-Schaltung<br />
bei einer ungeraden Oberwelle (3., 5. oder 7. Harmonische) betrieben. Grundwellenquarze für<br />
höhere Frequenzen stellt man i.a. nicht her, da im Hinblick auf die mechanische Stabilität die<br />
Dicke des Quarzscheibchens nicht beliebig zu verringern ist. Näheres über besondere<br />
Quarzschnitte sowie deren Frequenzstabilität bei Temperaturänderungen sind in [51] dargestellt.<br />
a) Quarz-Ersatzschaltbild<br />
Da bei der Anregung eines Quarzes frequenzmäßig sehr selektive mechanische Resonanzen<br />
auftreten, entspricht der Schwingquarz somit einem Resonanzkreis mit sehr hoher Güte Q. Das<br />
elektrische Ersatzschaltbild hierfür zeigt Bild 4.3.3-1a. Die Ersatzschaltung besteht aus einem<br />
Reihenschwingkreis mit einer großen Induktivität L 1 , einer sehr kleinen Kapazität C 1 und dem<br />
Verlustwiderstand R 1 (dynamische Ersatzgrößen), sowie aus der hierzu parallelen Kapazität C 0<br />
(C 0 >> C 1 ), die durch die Anregungselektroden bzw. die Halterung bedingt ist (statische<br />
Ersatzgröße).Um eine Aussage über das elektrische Verhalten eines Quarzes in der Umgebung<br />
der zu erwartenden Resonanzstellen (Reihenresonanz, Parallelresonanz) zu erhalten, setzt man<br />
im Ersatzbild (Bild 4.3.3-1a) den Gesamt-Leitwert an.<br />
C 1<br />
a)<br />
C 0<br />
R 1<br />
L 1<br />
Bild 4.3.3-1<br />
Schwingquarz<br />
a) Elektrisches Ersatzbild<br />
b) Verlauf von G = Re {Y ges } und B = Im {Y ges }<br />
20
ұ<br />
ges =<br />
1<br />
R 1 + j( ωL 1 –<br />
R 1<br />
1<br />
+ jωC 0 =<br />
ωC 1<br />
) 2<br />
ұ<br />
ges =<br />
2 1<br />
+ j[ωC 0 –<br />
R 1 + (ωL 1 –<br />
ωC 1<br />
) 2<br />
1<br />
R 1 – j( ωL 1 –<br />
ωC 1<br />
)<br />
2 1<br />
R 1 + ( ωL 1 –<br />
ωC 1<br />
) 2 + jωC 0 (4.3.3/1)<br />
1<br />
ωL 1 –<br />
ωC 1<br />
R 1<br />
2<br />
+ (ωL 1 –<br />
1<br />
] (4.3.3/2)<br />
ωC 1<br />
) 2<br />
Zur Ermittlung der beiden Resonanzfrequenzen ƒ S und ƒ P sind in Gl.(4.3.3/2) die Nullstellen des<br />
Im{ ұ<br />
ges} zu suchen.<br />
Im { ұ !<br />
ges} = 0<br />
1<br />
ω r L 1 –<br />
ω r C 1<br />
ω r C 0 –<br />
!<br />
2 1 = 0<br />
R 1 + (ω r L 1 –<br />
ω r C 1<br />
) 2<br />
ω r<br />
2<br />
C0 [R 1<br />
2<br />
+ (ω r L 1 –<br />
2 2 L 1 1<br />
ω r L1 – 2<br />
C<br />
+ 2 2<br />
1 ω r C1<br />
1<br />
ω r C 1<br />
) 2 ] = ω r<br />
2<br />
L1 – 1 C 1<br />
Beim Ausmultiplizieren des Imaginärteils ergibt sich eine biquadratische Gleichung. Mit der<br />
2<br />
Substitution ω<br />
~ = ωr erhält man die Gl.(4.3.3/3).<br />
2<br />
C0 L 1<br />
2 2 4<br />
ω r C0 R 1 + ωr L1 C 0 – 2ω r<br />
C<br />
+ C 0 2<br />
2 = ω r L1 – 1<br />
1 C 1<br />
C 1<br />
ω r<br />
4<br />
L1<br />
2<br />
C0 + ω r<br />
2<br />
[C0 R 1<br />
2<br />
– L1 – 2C 0L 1<br />
C 1<br />
] = – C 0<br />
C 1<br />
2 – 1 C 1<br />
ω r<br />
4<br />
+ ωr<br />
2<br />
[<br />
R 1<br />
2<br />
2<br />
ω<br />
~ = ωr<br />
L 1<br />
2 –<br />
2<br />
ω<br />
~ 2 + ω<br />
~ R 1<br />
[ 2 –<br />
L 1<br />
ω<br />
~<br />
1,2 =<br />
1<br />
L 1 C 1<br />
+<br />
1<br />
L 1 C 0<br />
–<br />
1<br />
L 1 C 0<br />
–<br />
2<br />
C 1 L 1<br />
] = –<br />
2<br />
C 1 L 1<br />
] +<br />
1<br />
2L 1 C<br />
– R 1<br />
2 ±<br />
0<br />
(<br />
2L 1<br />
2<br />
1<br />
C 1<br />
2<br />
L1<br />
2 –<br />
1<br />
C 1<br />
2<br />
L 1<br />
2 +<br />
1<br />
L 1 C 1<br />
+<br />
1<br />
2<br />
C 1 L 1 C0<br />
1<br />
C 0 C 1 L 1<br />
2 = 0<br />
1<br />
2L 1 C<br />
– R 1<br />
0<br />
2<br />
2L 1<br />
2) 2 –<br />
1 1<br />
2 2 –<br />
2 (4.3.3/3)<br />
C 1 L 1 C 0 C 1 L 1<br />
1<br />
L 1<br />
2<br />
C1<br />
2 +<br />
2<br />
1<br />
2L 1<br />
2<br />
C0 C 1<br />
–<br />
R 1<br />
2<br />
2L 1<br />
3<br />
C1<br />
+<br />
R 1<br />
2<br />
1<br />
2L 1<br />
2<br />
C0 C 1<br />
+<br />
4<br />
1<br />
4L 1<br />
2<br />
C0<br />
2 –<br />
R 1<br />
2<br />
4L 1<br />
3<br />
C0<br />
–<br />
R 1<br />
2<br />
2L 1<br />
3<br />
C1<br />
–<br />
R 1<br />
2<br />
3 + R 1<br />
4 –<br />
4L 1 C0 4L 1<br />
– R 1 1<br />
3 + 2 2 – 3 + R 1 1<br />
4 =<br />
L 1 C1 4L 1 C0 2L 1 C0 4L 1<br />
4L 2 2 [ 1 + R 1<br />
2 – 4R 1<br />
1 C 0 L 1 L 1 C<br />
– 2R 2<br />
1<br />
1 L<br />
]<br />
1<br />
4C 0<br />
2<br />
2C 0<br />
2<br />
C 0<br />
4<br />
1<br />
C 1<br />
2<br />
L1<br />
2 –<br />
1<br />
C 0 C 1 L 1<br />
2<br />
21
ω<br />
~<br />
1,2 = ω r<br />
21,2 =<br />
1<br />
L 1 C 1<br />
+<br />
2<br />
4<br />
C0<br />
2<br />
2<br />
C0<br />
2<br />
1<br />
2L 1 C<br />
– R 1 1<br />
2 ±<br />
0 2L 1<br />
2L 1 C<br />
1 + R 1<br />
2 – 4R 1<br />
0 L 1<br />
L 1 C<br />
– 2R 1<br />
1<br />
L 1<br />
2<br />
C0<br />
(4.3.3/3a)<br />
vernachlässigbar<br />
Da im Allgemeinen L 1 sehr groß und R 1 sowie C 0 klein sind, ist der Ausdruck R 1<br />
2
aus (4.3.3/5)<br />
mit ω P |<br />
R1 =0 ≈ 1<br />
L1C1<br />
1 + C 1<br />
C 0<br />
(4.3.3/6a)<br />
2<br />
C0<br />
ω S ≈ L 1 C 1 1 + R 1<br />
L<br />
≈ ω S<br />
1<br />
| [ 1 + 1 R1 =0 2<br />
R 1<br />
2<br />
C0<br />
L 1<br />
] (4.3.3/7)<br />
aus (4.3.3/5a) ω S |<br />
R1 =0<br />
1 + x ≈ 1 + 1 2 x<br />
mit ω S |<br />
R1 =0 ≈ 1<br />
L 1 C 1<br />
(4.3.3/7a)<br />
Die Güten des Quarzes lassen sich angeben, wenn man wie üblich ein Blindelement des<br />
Reihenkreises (z.B. L 1 ) bei Resonanz auf den Verlustwiderstand R 1<br />
bezieht (Gl.(4.3.3/8) + (4.3.3/9)).<br />
Q S =<br />
1<br />
tan(δ S ) = ω ω<br />
SL S<br />
1<br />
| L R1 =0<br />
1<br />
R<br />
≈<br />
1 R<br />
=<br />
1<br />
1<br />
C 1 L 1<br />
L 1<br />
R 1<br />
= 1 R 1<br />
L 1<br />
C 1<br />
(4.3.3/8)<br />
aus (4.3.3/7a)<br />
Q P =<br />
1<br />
tan(δ P ) = ω PL 1<br />
R 1<br />
≈ ω P |<br />
R1 =0<br />
L 1<br />
R 1<br />
=<br />
1<br />
L 1 C 1<br />
1 + C 1<br />
C 0<br />
L 1<br />
R 1<br />
aus (4.3.3/6a)<br />
Q P ≈ 1 R 1<br />
L 1<br />
C 1<br />
1 + C 1<br />
C 0<br />
= Q S 1+ C 1<br />
C 0<br />
(4.3.3/9)<br />
aus (4.3.3/8) Q S<br />
In (4.3.3/8) ist der Kennwiderstand des Quarzes aus den dynamischen Ersatzgrößen (<strong>als</strong>o das<br />
L/C-Verhältnis) sehr groß gegenüber dem Verlustwiderstand R 1 und damit die Güte sehr groß. In<br />
Bild 4.3.3-1b sind die Verläufe von G = Re{Y ges } und B = Im{Y ges } nach (4.3.3/2) qualitativ<br />
aufgetragen. Man erkennt hieraus, dass der Quarz bei ƒ S niederohmig ist, d.h. einem<br />
Reihenschwingkreis mit dem Verlustwiderstand R 1 und der hohen Güte Q S entspricht (bis auf den<br />
kleinen Blindanteil jω S C 0 ). Bei ƒ P ist der Quarz hochohmig, entspricht <strong>als</strong>o einem<br />
Parallelschwingkreis mit dem Verlustwiderstand R P [51].<br />
Zwischen ƒ S und ƒ P hat Y ges einen negativen und somit Z ges = 1/Y ges einen positiven Blindanteil. Der<br />
Quarz entspricht <strong>als</strong>o in diesem Bereich einer Impedanz mit induktivem Charakter. Somit lässt<br />
sich z.B. im Colpitts-Oszillator die Spule L durch einen Quarz ersetzen, der in obigem<br />
Frequenzbereich schwingt.<br />
Zur Veranschaulichung der Größenverhältnisse sind für einen Quarz mit seinen Ersatzgrößen<br />
(nach Herstellerangabe) nochm<strong>als</strong> die wichtigsten Kenngrößen verfolgt (Beispiel 4.3.3/1).<br />
23
Bsp. 4.3.3/1: Vom Hersteller liegen über einen Grundton-Quarz die folgenden Ersatzgrößen vor:<br />
L 1 = 37,2 mH; C 1 = 16 fF = 0,016 pF; R 1 = 38 Ω;<br />
C 0 = 5 pF + 30 pF = 35 pF (hiervon 30 pF Lastkapazität).<br />
a) Wie groß sind ƒ S| und ƒ R1 =0 P| R1<br />
=0<br />
beim Quarz?<br />
b) Wie groß sind ƒ S und ƒ P bei R 1 ?<br />
c) Wie groß ist der absolute und prozentuale Abstand zwischen ƒ P und ƒ S ?<br />
d) Wie groß sind die Güten Q S und Q P ?<br />
a) aus (4.3.3/5a) ƒ S| ≈ 1<br />
R1<br />
=<br />
=0<br />
2π L 1 C 1<br />
aus (4.3.3/6a) ƒ P| ≈ 1 R1 =0 2π<br />
2π<br />
1<br />
37,2 · 10 –3 Vsec<br />
A<br />
· 10–15 Asec<br />
V<br />
= 6,523620 MHz<br />
1<br />
1 + C 1<br />
L 1 C 1<br />
C<br />
= 6,523620 MHz 1 + 0,016<br />
0 35<br />
= 6,525111 MHz<br />
b) aus (4.3.3/5) ƒ S ≈ 1 2π<br />
1<br />
1 + R 1<br />
L 1 C 1<br />
2<br />
C0<br />
L 1<br />
= ƒ S| R1<br />
=0 1 + R 1<br />
2<br />
C0<br />
L 1<br />
ƒ S = 6,523620 MHz<br />
1 + 382 V 2 · 35 ·10 –12 Asec<br />
A 2 –3 Vsec<br />
= 6,523624 MHz<br />
· 37,2 · 10<br />
A · V<br />
aus (4.3.3/6) ƒ P ≈ ƒ P| R1<br />
2<br />
C0<br />
1,3586 · 10 –6<br />
1 – R 1<br />
=0 L<br />
= 6,525111 MHz 1 – 1,3586 · 10 –6<br />
1<br />
ƒ P ≈ 6,525106 MHz<br />
c) absoluter Frequenzabstand ∆ƒ = ƒ P – ƒ S = (6,525106 – 6,523624) MHz<br />
∆ƒ = 1482 Hz<br />
prozentualer Frequenzabstand ƒ P – ƒ S 1482<br />
ƒ<br />
=<br />
6 = 0,2272 %o<br />
S 6,523624 · 10<br />
d) aus (4.3.3/8) Q S ≈ 1 L 1<br />
R 1 C<br />
= 1 A<br />
1 38 V<br />
37,2 · 10 –3 Vsec<br />
–15 Asec<br />
= 40.126<br />
16 · 10<br />
V A<br />
aus (4.3.3/9) Q P ≈ Q S 1 + C 1<br />
C<br />
= 40.126 · 1 + 0,016<br />
0 35 = 40.135<br />
Oft ist man daran interessiert, die Schwingfrequenz eines Quarzes geringfügig zu verändern.<br />
Dieses „Ziehen“ des Quarzes lässt sich durch eine Reihen- oder Parallelschaltung von<br />
Kapazitäten bzw. Induktivitäten erreichen (Bild 4.3.3-2).Nachteilig ist hierbei, dass die Güte des<br />
gezogenen Quarzes durch die wesentlich höheren Verlustfaktoren der Zusatzreaktanzen<br />
abnimmt. Ist ein Ziehen erforderlich, bevorzugt man daher i.a. kleine Kapazitäten, da diese<br />
geringere Verlustfaktoren besitzen <strong>als</strong> Spulen. Besser ist es allerdings, die im Oszillator (z.B. bei<br />
kapazitiver Dreipunkt-Schaltung) zu erwartende kapazitive Last gleich dem Quarz-Hersteller<br />
mitzuteilen. Durch Berücksichtigung dieser Angabe bei Schleifen des Quarzes ist später kaum<br />
24
noch ein Ziehen erforderlich. Erfolgt keine eigene Mitteilung, wird meistens vom Hersteller<br />
ersatzweise eine Lastkapazität angenommen (z.B. C L = 30 pF).<br />
Bild 4.3.3-2<br />
Ziehen eines Quarzes<br />
durch Kapazität bzw. Induktivität<br />
b) Pierce-Oszillator im Grundton-Betrieb<br />
Ersetzt man bei der kapazitiven Dreipunkt-Schaltung (Colpitts-Oszillator, vgl. Bild 4.3.2-3) die<br />
Spule L durch einen Quarz, so erhält man den Pierce-Oszillator, dessen Schaltung in<br />
Bild 4.3.3-3a dargestellt ist. Die zugehörige wechselmäßige Ersatzschaltung zeigt Bild 4.3.3-3b.<br />
Zur Unterscheidung von den übrigen Bauelementen sind die dynamischen Ersatzgrößen des<br />
(verlustlos angenommenen) Quarzes mit dem Index Q versehen.<br />
Die Schwingfrequenz des Quarzes erhält man wiederum aus der Resonanzbedingung, d.h. aus<br />
dem Verschwinden des gesamten Blindanteils. Mit der Last- oder Bürdenkapazität C L für den<br />
Quarz ergibt sich die Gl.(4.3.3/10).<br />
C L = C 1* C 2 *<br />
C 1 * + C 2 *<br />
(4.3.3/10)<br />
mit C 1 * = C 1 + C BE C 2 * = C 2 + C CE (4.3.3/11)<br />
25
+ U B<br />
Q<br />
C >><br />
C 2<br />
R 2<br />
C 1<br />
C >><br />
R 1<br />
L >><br />
RE<br />
a)<br />
Bild 4.3.3-3<br />
Pierce-Oszillator in Emitterschaltung<br />
a) Schaltung<br />
b) Ersatzschaltung<br />
Der Gesamt-Blindanteil beträgt<br />
1<br />
jB ges (ω) = jω (C 0 + C L ) +<br />
1<br />
(4.3.3/12)<br />
jωL 1Q – j<br />
ωC 1Q<br />
Bei Resonanz gilt B ges (ω r ) = 0 ( Im{ ұ ges(ω r )} = 0)<br />
1<br />
==> ω 0 (C 0 + C L ) =<br />
1<br />
ω 0 L 1Q –<br />
ω 0 C 1Q<br />
ω 0 2 L 1Q (C 0 + C L ) – C 0 + C L<br />
C 1Q<br />
= 1 | ·<br />
C 1Q<br />
C 1Q<br />
C 0 + C L<br />
ω 2 0 L 1Q C 1Q – 1 =<br />
C 0 + C L<br />
Damit beträgt die Schwingfrequenz ƒ 0 des Pierce-Oszillators<br />
1<br />
C 1Q<br />
ƒ 0 =<br />
1 +<br />
2π L 1Q C 1Q<br />
C 0 + C<br />
(4.3.3/13)<br />
L<br />
Wie zu erwarten war, wird die Schwingfrequenz des Oszillators durch die Lastkapazität C L<br />
, sondern auf einer<br />
=0<br />
Frequenz ƒ 0 zwischen diesen beiden Werten. Hier stellt der Quarz die erforderliche Impedanz mit<br />
beeinflusst. Der Oszillator schwingt <strong>als</strong>o weder bei ƒ S| noch bei ƒ R1 =0 P| R1<br />
26
induktiven Charakter dar. Man spricht auch davon, dass der Oszillator auf seiner „gezogenen“<br />
Parallelresonanz schwingt.<br />
Wie schon angemerkt, empfiehlt sich bei Bestellung eines Quarzes die Angabe der Lastkapazität<br />
C L , wodurch später der Quarz in der Schwingschaltung nur noch geringfügig auf die gewünschte<br />
Frequenz ƒ 0 gezogen werden muss. Bei dem eben betrachteten Pierce-Oszillator in Emitter-<br />
Schaltung handelt es sich um einen Grundton-Oszillator, d.h. der Quarz schwingt auf seiner<br />
Grundfrequenz. Der gleiche Oszillator lässt sich auch in Basis- oder Kollektor-Schaltung<br />
aufbauen (Bild 4.3.3-4).<br />
+ U B<br />
C >><br />
C 1<br />
R 2 T<br />
Q<br />
C K<br />
C 2<br />
R 1 T<br />
R E<br />
R L<br />
a)<br />
R 1T<br />
||<br />
R 2T<br />
B<br />
Y .<br />
21C U 1<br />
r e<br />
E<br />
r a<br />
C 1<br />
L 1Q<br />
U P C<br />
U 0<br />
C 2<br />
CE<br />
RE R C 2<br />
C 1Q L<br />
b)<br />
C<br />
Bild 4.3.3-4<br />
Pierce-Oszillator in Kollektor-Schaltung<br />
a) Schaltung<br />
b) Ersatzschaltbild<br />
c) Quarz-Oberton-Oszillatoren<br />
Wird der Quarz bei einer ungeraden Harmonischen, im sog. Oberton-Betrieb, angeregt, so ist die<br />
dynamische Kapazität C 1Q viel kleiner <strong>als</strong> bei Grundton-Betrieb und trotz größeren<br />
Verlustwiderstandes R 1Q die Güte Q nach (4.3.3/8) i.a. höher <strong>als</strong> bei Grundton-Betrieb.<br />
Bild 4.3.3-5a zeigt <strong>als</strong> Beispiel die Schaltung eines Quarz-Oszillators, der bei ƒ 0 = 50 MHz im<br />
3.Oberton betrieben wird [51]. Der Parallelschwingkreis wird hierbei auf die 3.Harmonische<br />
(ƒ 0 = 50 MHz) abgestimmt. Der Quarz schwingt in Serienresonanz (niederohmig und ≈ reell) und<br />
bewirkt dadurch, dass bei Schwingfrequenz ƒ 0 der Verstärker praktisch in Basis-Schaltung<br />
arbeitet. Durch die innere Kapazität C CE (sowie die Steilheitsphase) erfolgt die zur Rückkopplung<br />
notwendige Phasendrehung zwischen Ausgang und Eingang. D.h. bei ƒ 0 ist die Schaltung<br />
vergleichbar mit der Oszillator-Schaltung von Bild 4.3.2-4. Schwingbedingung und<br />
Schwingsicherheit (Betrag und Phase) sind durch L und C 2 einstellbar (C 2 ist hier kein<br />
wechselmäßiger Kurzschluss).<br />
Ein weiterer oft benutzter Oszillator in Basisschaltung mit Oberton-Quarzen<br />
(5., 7., 9. Harmonische) für den Frequenzbereich von ca. 70...200 MHz ist in Bild 4.3.3-5b<br />
dargestellt. Hier wird der Quarz ebenfalls in seiner Serienresonanz betrieben und liegt mit<br />
seinem niederohmigen reellen Widerstand im Rückkopplungszweig der kapazitiven Dreipunkt-<br />
Schaltung.<br />
27
+ U B<br />
C >><br />
R 2<br />
C 1<br />
L<br />
Q<br />
R 1<br />
RE<br />
C S<br />
C 2<br />
a)<br />
+U B<br />
C >><br />
C >><br />
C 1<br />
L<br />
R<br />
P<br />
2<br />
Q<br />
R E<br />
R 1<br />
C 2<br />
L<br />
b)<br />
Bild 4.3.3-5 Quarz-Oberton-Oszillator<br />
a) für Frequenzbereich von ca. 30...80 MHz<br />
b) für Frequenzbereich von ca. 70...200 MHz<br />
Durch Kompensation der statischen Kapazität C 0 mit einer Zusatzinduktivität<br />
L P = 1 / (ω 0<br />
2C 0 ) wird erreicht, dass die Schwingfrequenz des Oszillators ƒ 0 exakt mit der<br />
Serienresonanzfrequenz des Quarzes übereinstimmt. Die Kompensation mit L P sowie der<br />
Schaltungsaufbau müssen sehr sorgfältig erfolgen, damit nicht eine ungewollte Frequenz<br />
angeregt wird. Der Parallelschwingkreis ist auf die Frequenz des Oberton-Quarzes ausgelegt. Die<br />
restliche Dimensionierung erfolgt ähnlich wie bei einem Colpitts-Oszillator im Grundton-<br />
Betrieb.<br />
28