Skript - Frank Reinhold
Skript - Frank Reinhold
Skript - Frank Reinhold

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5 Rotation<br />
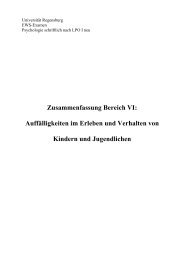
Abbildung 5.24: oblater Kreisel<br />
â, ˆb, ĉ Einheitsvektoren in Richtung der Hauptachsen (körperfestes Bezugssystem).<br />
Momentane Drehachse<br />
kinetische Energie<br />
⃗ω = ω a â + ω bˆb + ωc ĉ = (ω a , ω b ω c ) (5.96)<br />
⎛ ⎞ ⎛ ⎞<br />
I a 0 0 ω a<br />
⃗L = ⎝ 0 I b 0 ⎠ ⎝ω b<br />
⎠ = I a ω a â + I b ω bˆb + Ic ω c ĉ (5.97)<br />
0 0 I c ω c<br />
E rot = 1 2 (I aω 2 a + I b ω 2 b + I c ω 2 c ) (5.98)<br />
b) Euler-Gleichungen<br />
Vorsicht: â, ˆb, ĉ rotieren mit Kreisel, sind zeitlich nicht konstant.<br />
dL<br />
⃗<br />
dt = I dω a<br />
a<br />
dt â + I dω b<br />
b<br />
dt ˆb dω c<br />
+ I c<br />
dt ĉ + I dâ<br />
aω a<br />
dt + I dˆb<br />
bω b<br />
dt + I dĉ<br />
cω c<br />
dt<br />
(5.99)<br />
Das körperfeste Bezugssystem dreht sich mit ⃗ω.<br />
Damit ist<br />
dâ<br />
= ⃗ω × â<br />
dt<br />
(5.100)<br />
dˆb<br />
dt = ⃗ω × ˆb (5.101)<br />
dĉ<br />
= ⃗ω × ĉ<br />
dt<br />
(5.102)<br />
dL<br />
⃗<br />
dt = d⃗ L ′<br />
dt + ⃗ω × L ⃗ (5.103)<br />
68