Skript - Frank Reinhold
Skript - Frank Reinhold
Skript - Frank Reinhold

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
2 Grundbegriffe der Bewegung<br />
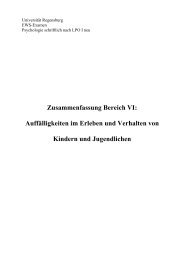
Abbildung 2.10: Bewegte Bezugssysteme<br />
Galilei-Transformation<br />
⃗r = ⃗r ′ + ⃗ut (2.23)<br />
⃗v = ⃗v ′ + ⃗u (2.24)<br />
t = t ′ (2.25)<br />
• Mit konstanter Geschwindigkeit bewegte Bezugssysteme heißen Inertialsysteme<br />
• Zeit ist unabhängig vom Intertialsystem (für |⃗u| ≪ c)<br />
• Die Gesetze der klassischen Mechanik sin invariant gegen Galilei-Transformation, d.h. gleiches Cerhalten<br />
unabhängig vom gewählten Inertialsystem<br />
2.3 Beschleunigung<br />
Bechleunigung ⃗a (acceleration) definiert als Änderung der Geschwindigkeit ⃗v in einem infinitesimalen<br />
Zeitraum<br />
Die Beschleunigung ist die 2. Ableitung des Ortes nach der Zeit<br />
⃗a = d⃗v<br />
dt = d ( ) d⃗r<br />
= d ˙⃗r<br />
dt dt dt = ¨⃗r<br />
Im kartesischen Koordinatensystem ist<br />
⃗a = (a x , a y , a z ) =<br />
∆⃗v<br />
⃗a = lim<br />
∆t→0 ∆t = d⃗v<br />
dt = ˙⃗v (2.26)<br />
[ m<br />
s 2 ]<br />
( dvx<br />
dt , dv y<br />
dt , dv ) (<br />
z d 2 )<br />
r x<br />
=<br />
dt dt 2 , d2 r y<br />
dt 2 , d2 r z<br />
dt 2<br />
a) Gleichförmig beschleunigte geradlinige Bewegung<br />
Beschleunigung ⃗a = ⃗a 0 ist zeitunabhängig.<br />
Geschwindigkeit:<br />
⃗v(t) − ⃗v 0 =<br />
∫ t<br />
0<br />
d⃗v<br />
dt ′ dt ′ =<br />
∫ t<br />
0<br />
(2.27)<br />
(2.28)<br />
⃗a 0 dt ′ = ⃗a 0 · t (2.29)<br />
14