5: Erzwungene Schwingungen (TD_EMS_5_ES_HS09_DS.pdf)
5: Erzwungene Schwingungen (TD_EMS_5_ES_HS09_DS.pdf)
5: Erzwungene Schwingungen (TD_EMS_5_ES_HS09_DS.pdf)

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5 <strong>Erzwungene</strong> <strong>Schwingungen</strong><br />
5.1 Periodische Anregung<br />
Kraft F(t) [kN]<br />
4.0<br />
T 0<br />
3.5<br />
3.0<br />
2.5<br />
2.0<br />
1.5<br />
1.0<br />
Halbsinusanregung<br />
∞<br />
<br />
Ft () = a 0<br />
+ [ a n<br />
cos( nω 0<br />
t)<br />
+ b n<br />
sin( nω 0<br />
t)<br />
]<br />
n = 1<br />
Mit der Grundfrequenz<br />
ω 0<br />
=<br />
2π<br />
-----<br />
T 0<br />
Unter Berücksichtigung der Orthogonalitätsrelationen:<br />
<br />
<br />
T 0<br />
0<br />
T 0<br />
0<br />
sin( nω 0 t) sin( jω 0 t)<br />
dt<br />
=<br />
cos( nω 0<br />
t)<br />
cos( jω 0<br />
t)<br />
dt<br />
=<br />
0 für n ≠ j<br />
<br />
T 0<br />
⁄ 2 für n = j<br />
0 für n ≠ j<br />
<br />
T 0<br />
⁄ 2 für n = j<br />
(5.2)<br />
(5.3)<br />
(5.4)<br />
(5.5)<br />
0.5<br />
0.0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
Eine Anregung ist periodisch wenn:<br />
Ft ( + nT o<br />
) = Ft () für n = – ∞, …,– 1, 0, 1 ,…∞<br />
, (5.1)<br />
Die Funktion Ft () kann dann als Summe von mehreren harmonischen<br />
Funktionen in Form einer Fourier-Reihe dargestellt werden,<br />
und zwar:<br />
T 0<br />
cos( nω 0 t)<br />
sin ( jω 0 t)<br />
d t = 0<br />
0<br />
(5.6)<br />
können die Fourier-Koeffizienten a n<br />
berechnet werden indem<br />
Gleichung (5.2) zuerst mit cos( jω 0<br />
t)<br />
multipliziert wird und anschliessend<br />
über die Periode integriert wird.<br />
• j = 0<br />
T 0<br />
Ft () cos( jω 0 t)<br />
d t = a 0 cos( jω 0 t)<br />
dt<br />
0<br />
T 0<br />
0<br />
+<br />
∞<br />
<br />
n = 1<br />
T 0<br />
a n<br />
0<br />
T 0<br />
cos ( nω 0 t)<br />
cos( jω 0 t)<br />
d t + b n sin( nω 0 t)<br />
cos( jω 0 t)<br />
dt<br />
T 0<br />
0<br />
(5.7)<br />
<br />
T 0<br />
0<br />
Ft () dt<br />
T 0<br />
= a d 0 t = a 0 T 0<br />
0<br />
(5.8)<br />
Alessandro Dazio 83<br />
Alessandro Dazio 84
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
1<br />
a 0<br />
= ----- ⋅ Ft () dt<br />
• j = n<br />
T 0<br />
T 0<br />
<br />
T 0<br />
0<br />
Ft () cos( jω 0<br />
t)<br />
d t = a 0<br />
cos( jω 0<br />
t)<br />
dt<br />
0<br />
T 0<br />
0<br />
+<br />
∞<br />
<br />
n = 1<br />
T 0<br />
a n<br />
0<br />
cos ( nω 0 t)<br />
cos( jω 0 t)<br />
d t + b n sin( nω 0 t)<br />
cos( jω 0 t)<br />
dt<br />
T 0<br />
0<br />
(5.9)<br />
(5.10)<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.1.1 Stationäre Antwort infolge periodischer Anregung<br />
mu·· + cu· + ku = F()<br />
t<br />
u·· 2 Ft ()<br />
+ 2ζω n u· + ω nu<br />
= ---------<br />
m<br />
∞<br />
<br />
Ft () = a 0 + [ a n cos( nω 0 t)<br />
+ b n sin( nω 0 t)<br />
]<br />
n = 1<br />
a 0<br />
• Statischer Teil ( )<br />
(5.14)<br />
(5.15)<br />
(5.16)<br />
T 0<br />
Ft () cos( nω 0 t)<br />
d<br />
T 0<br />
t = a n ⋅ -----<br />
2<br />
0<br />
(5.11)<br />
u 0<br />
() t<br />
=<br />
a<br />
---- 0<br />
k<br />
(5.17)<br />
2<br />
a n<br />
= ----- ⋅ Ft () cos( nω 0<br />
t)<br />
dt<br />
T 0<br />
<br />
T 0<br />
0<br />
(5.12)<br />
Die Fourier-Koeffizienten können ähnlich berechnet werden<br />
indem Gleichung (5.2) zuerst mit sin( jω 0<br />
t)<br />
multipliziert wird und<br />
anschliessend über die Periode integriert wird.<br />
• Bemerkungen<br />
b n<br />
2<br />
b n<br />
= ----- ⋅ Ft () sin( nω 0<br />
t)<br />
dt<br />
a 0<br />
T 0<br />
<br />
T 0<br />
0<br />
T 0<br />
- ist der Mittelwert der Funktion<br />
Ft ()<br />
(5.13)<br />
- Die Integrale können ebenfalls über das Intervall<br />
[– T 0<br />
⁄ 2, T 0<br />
⁄ 2]<br />
berechnet werden.<br />
- Für j = 0 gibt es keinen b-Koeffizient<br />
• Harmonischer Teil “Cosinus” (siehe harmonische Anregung)<br />
2<br />
Cosinus<br />
a n 2ζβ<br />
u n () t ---- n sin( nω 0 t)<br />
+ ( 1 – β n ) cos( nω 0 t)<br />
nω<br />
---------------------------------------------------------------------------------------- ,<br />
0<br />
= ⋅<br />
k<br />
2<br />
( 1 – β n<br />
) 2 β<br />
+ ( 2ζβ n<br />
) 2<br />
n = ---------<br />
ω n<br />
(5.18)<br />
• Harmonischer Teil “Sinus” (Ähnlich wie “Cosinus”)<br />
2<br />
Sinus b n<br />
( 1 – β<br />
u n () t ---- n<br />
) sin( nω 0<br />
t)<br />
– 2ζβ n<br />
cos( nω 0<br />
t)<br />
nω<br />
---------------------------------------------------------------------------------------- ,<br />
0<br />
= ⋅<br />
k<br />
2<br />
( 1 – β n ) 2 β<br />
+ ( 2ζβ n ) 2<br />
n = ---------<br />
ω n<br />
(5.19)<br />
• Die stationäre Antwort ut () eines gedämpften <strong>EMS</strong> unter der<br />
periodischen Anregungskraft Ft () ist gleich der Summe der<br />
Terme der Fourier-Reihe.<br />
Cosinus<br />
ut () = u 0<br />
() t + u n<br />
() t +<br />
∞<br />
<br />
n = 1<br />
∞<br />
<br />
n = 1<br />
Sinus<br />
u n () t<br />
(5.20)<br />
Alessandro Dazio 85<br />
Alessandro Dazio 86
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
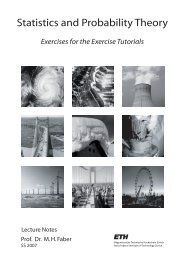
5.1.2 Halbsinus<br />
Eine Folge von Halbsinus-Funktionen ist ein gutes Modell für die<br />
Kraft, die durch eine hüpfende Person erzeugt wird.<br />
Kraft F(t) [kN]<br />
4.0<br />
3.5<br />
3.0<br />
2.5<br />
2.0<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
Ft ()<br />
t p<br />
T 0<br />
Halbsinusanregung<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
=<br />
<br />
<br />
<br />
<br />
<br />
πt<br />
Asin<br />
----<br />
<br />
<br />
für 0 ≤ t < t p<br />
t p<br />
0 für t p<br />
≤ t<<br />
T 0<br />
(5.21)<br />
Die Fourier-Koeffizienten können am Besten mit einem Mathematikprogramm<br />
berechnet werden und betragen:<br />
a 0<br />
A<br />
----- πt<br />
----<br />
2Aτ<br />
= ⋅<br />
<br />
sin dt<br />
= --------- mit τ = ----- (5.22)<br />
π<br />
T 0<br />
t p<br />
0<br />
t p<br />
t p<br />
T 0<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
a n<br />
b n<br />
(5.23)<br />
Die Approximation des Halbsinusmodelles für T 0<br />
= 0.5s und<br />
t p<br />
= 0.16s durch 6 Fourier-Terme sieht folgendermassen aus:<br />
Kraft F(t) [kN]<br />
• Bemerkung<br />
t p<br />
2A<br />
------ πt<br />
----<br />
4Aτcos( nπτ)<br />
= ⋅ sin ( nω<br />
T 0<br />
<br />
cos<br />
t p<br />
0<br />
t) dt<br />
= ------------------------------------<br />
0<br />
π( 1–<br />
4n 2 τ 2 )<br />
t p<br />
2A<br />
------ ----<br />
πt<br />
4Aτsin( nπτ)<br />
cos( nπτ)<br />
= ⋅ sin sin( nω<br />
T 0<br />
t p<br />
0<br />
t) dt<br />
= --------------------------------------------------------<br />
0<br />
π( 1 – 4n 2 τ 2 )<br />
(5.24)<br />
4.0<br />
3.0<br />
2.0<br />
1.0<br />
0.0<br />
-1.0<br />
-2.0<br />
T 0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
Der statische Term a 0<br />
= 2Aτ⁄ π = G entspricht dem Gewicht G<br />
der hüpfenden Person.<br />
2<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
Alessandro Dazio 87<br />
Alessandro Dazio 88
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.1.3 Beispiel: “Hüpfen auf Stahlbetonbalken”<br />
• Balken<br />
• Anregung (Ähnlich wie Seite 186 von [Bac+97])<br />
Kraft F(t) [kN]<br />
4.0<br />
3.5<br />
3.0<br />
2.5<br />
2.0<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
Halbsinusanregung<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
• Elastizitätsmodul:<br />
E = 23500MPa<br />
• Dichte:<br />
ρ = 20.6kN ⁄ m 3<br />
• Biegesteifigkeit:<br />
EI = 124741kNm 2<br />
• Dämpfungsrate<br />
ζ = 0.017<br />
• Modale Masse<br />
M n<br />
= 0.5M tot<br />
• Modale Steifigkeit<br />
π<br />
K 4<br />
n<br />
-----<br />
EI<br />
= ⋅ -----<br />
2 L 3<br />
• Hüpffrequenz:<br />
f 0<br />
= 2Hz<br />
• Periode: T 0<br />
= 0.5s<br />
• Kontaktzeit:<br />
t p<br />
= 0.16s<br />
• Gewicht der Person:<br />
G = 0.70kN<br />
• Amplitude:<br />
A = 3.44kN<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Maximale Durchbiegungen<br />
Statisch:<br />
Dynamisch: = max( u()<br />
t ) mit ut () aus Gleichung (5.20)<br />
Verhältnis:<br />
• Untersuchte Fälle<br />
Länge<br />
[m]<br />
• Bemerkungen<br />
u st<br />
=<br />
u max<br />
V<br />
=<br />
------<br />
G<br />
K n<br />
u<br />
---------- max<br />
u st<br />
Frequenz f n<br />
[Hz]<br />
u max<br />
[m]<br />
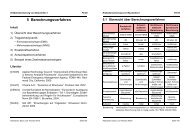
- Wenn die Anregungsfrequenz f 0<br />
doppelt so gross ist im<br />
Vergleich zur Eigenfrequenz des Balkens f n<br />
, ist der Vergrösserungsfaktor<br />
V klein.<br />
- Berücksichtigung der höheren Harmonischen kann wichtig<br />
sein!<br />
V<br />
[-]<br />
26.80 1 0.003 1.37<br />
19.00 2 0.044 55.94<br />
15.50 3 0.002 3.62<br />
13.42 4 0.012 41.61<br />
12.01 5 0.001 4.20<br />
10.96 6 0.004 25.02<br />
Alessandro Dazio 89<br />
Alessandro Dazio 90
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Fall 1: f 0 = 2Hz, f n = 1Hz<br />
• Fall 3: f 0 = 2Hz, f n = 3Hz<br />
0.0035<br />
0.0020<br />
Verschiebung [m]<br />
0.0030<br />
0.0025<br />
0.0020<br />
0.0015<br />
0.0010<br />
0.0005<br />
0.0000<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
Verschiebung [m]<br />
0.0015<br />
0.0010<br />
0.0005<br />
0.0000<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
-0.0005<br />
-0.0010<br />
-0.0005<br />
-0.0015<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
• Fall 2: f 0 = 2Hz, f n = 2Hz<br />
-0.0010<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
• Fall 4: f 0 = 2Hz, f n = 4Hz<br />
0.0500<br />
0.0400<br />
0.0300<br />
0.0150<br />
0.0100<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
Verschiebung [m]<br />
0.0200<br />
0.0100<br />
0.0000<br />
-0.0100<br />
-0.0200<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Verschiebung [m]<br />
0.0050<br />
0.0000<br />
-0.0050<br />
-0.0300<br />
-0.0400<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
-0.0100<br />
-0.0500<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
-0.0150<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
Alessandro Dazio 91<br />
Alessandro Dazio 92
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Fall 5: f 0 = 2Hz, f n = 5Hz<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.2 Zeitschrittverfahren<br />
0.0010<br />
0.0008<br />
0.0006<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
Verschiebung [m]<br />
0.0004<br />
0.0002<br />
0.0000<br />
-0.0002<br />
-0.0004<br />
-0.0006<br />
-0.0008<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
• Fall 6: f 0 = 2Hz, f n = 6Hz<br />
mu·· + cu· + ku = – mu··g<br />
f s<br />
(5.25)<br />
Verschiebung [m]<br />
0.0050<br />
0.0040<br />
0.0030<br />
0.0020<br />
0.0010<br />
0.0000<br />
-0.0010<br />
-0.0020<br />
-0.0030<br />
-0.0040<br />
Statischer Anteil (n=0)<br />
Erste Harmonische (n=1)<br />
Zweite Harmonische (n=2)<br />
Dritte Harmonische (n=3)<br />
Total (6 Harmonische)<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Zeit (s)<br />
u·· 2 + 2ζω n<br />
u + ω nu<br />
= – u··g<br />
(5.26)<br />
Wobei: ζ<br />
2<br />
= c ⁄ ( 2mω n<br />
) , ω n<br />
= k ⁄ m,<br />
f s = ku<br />
2 = mω nu<br />
(5.27)<br />
• Die vollständige Berechnung der dynamischen Antwort erfolgt<br />
durch:<br />
• Faltungsintegral ([Ba02] Abschnitte 5.2.1c und 5.4.2a)<br />
• Numerische Integration der DGL ([Cho07] Abschnitt 5)<br />
Alessandro Dazio 93<br />
Alessandro Dazio 94
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.2.1 Integrationsverfahren nach Newmark<br />
• Inkrementelle Formulierung der Differentialgleichung<br />
u( τ) t t<br />
u u· ( τ – t) t<br />
u·· + Δu·· ------ ( τ – t) 2<br />
= + + ----------------<br />
2 2<br />
(5.33)<br />
mΔu·· + cΔu· + kΔu = – mΔu··g<br />
(5.28)<br />
t + Δt<br />
t t + Δt t t + Δt<br />
u = u + Δu , u· = u· + Δu· , u·· t<br />
= u·· + Δu·· (5.29)<br />
• Annahme des Verlaufs der Beschleunigung im Zeitschritt<br />
Die Inkremente der Beschleunigung, Geschwindigkeit und Verschiebung<br />
im Zeitschritt betragen somit:<br />
Δu··<br />
t + Δt<br />
u·· t<br />
= – u·· = Δu··<br />
t + Δt t t<br />
Δu· u· – u· u·· Δu··<br />
= = + ------ Δt<br />
2 <br />
(5.34)<br />
(5.35)<br />
t t<br />
Δu u· Δt u·· + Δu·· ------<br />
<br />
Δt 2<br />
= + -------<br />
2 2<br />
(5.36)<br />
u·· ( τ)<br />
1 t<br />
--<br />
2<br />
u·· t + Δt<br />
( + u·· t<br />
= ) = u··<br />
τ<br />
+ Δu·· ------<br />
2<br />
t<br />
u· ( τ) u· u·· t t<br />
+ ( τ) dτ<br />
u· u·· Δu··<br />
= = + + ------ ( τ – t)<br />
2 <br />
t<br />
τ<br />
u( τ) t u +<br />
u· ( τ) dτ<br />
t t t<br />
= = u u· u·· + Δu··<br />
+ ------ <br />
+ ( τ – t)<br />
dτ<br />
2 <br />
t<br />
τ<br />
t<br />
(5.30)<br />
(5.31)<br />
(5.32)<br />
Die Gleichungen für Δu· und Δu können generalisiert werden als:<br />
mit:<br />
Δu·<br />
t<br />
u·· + γΔu··<br />
t<br />
= ( )Δt , Δu = u· Δt+<br />
( t u·· + 2βΔu·· )-------<br />
Δt2 (5.37)<br />
2<br />
Konstante Beschleunigung:<br />
1<br />
β = -- , γ =<br />
4<br />
1<br />
--<br />
2<br />
Lineare Beschleunigung:<br />
1<br />
β = -- , γ =<br />
6<br />
1<br />
--<br />
2<br />
Δt<br />
---- ≤ ∞<br />
T<br />
Δt<br />
---- ≤ 0.551<br />
T<br />
Alessandro Dazio 95<br />
Alessandro Dazio 96
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Lösung der DGL<br />
Die Ausdrücke von Gleichung (5.37) werden in Gleichung (5.28)<br />
eingesetzt, die jetzt für die einzige verbleibende Unbekannte Δu··<br />
gelöst werden kann<br />
( m + cγΔt + kβΔt 2 )Δu·· t<br />
– mΔu··g c u·· t<br />
= – Δt – k<br />
u· Δt + u·· ------- <br />
2 <br />
oder in kompakter Form<br />
(5.38)<br />
m˜ Δu·· = Δp ˜<br />
(5.39)<br />
Durch Rückwärtseinsetzen von Δu·· können die gesuchten Bewegungsgrössen<br />
zur Zeit t + Δt berechnet werden.<br />
Lineare Systeme<br />
t Δt 2<br />
• m, c und k bleiben konstant während des Erdbebens.<br />
• Die Grösse m˜ ist ebenfalls konstant und kann im Voraus bestimmt<br />
werden.<br />
Nicht-lineare Systeme (siehe Vorlesung Erdbeben)<br />
• Die Masse m und die Dämpfung c bleiben typischerweise konstant<br />
während des ganzen Erdbebens.<br />
• Die Steifigkeit k variiert während des Erdbebens und m˜ ist somit<br />
nicht mehr konstant.<br />
• Falls sich die Steifigkeit innerhalb des Zeitschrittes ändert,<br />
muss sie iteriert werden.<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.2.2 Implementierung des Integrationsverfahrens<br />
nach Newmark in der Excel-Tabelle<br />
“<strong>TD</strong>_Einmassenschwinger_<strong>HS09</strong>.xls”<br />
Gleichung (5.38), hier nochmals geschrieben, wird in der Excel-<br />
Tabelle wie folgt implementiert:<br />
( m + cγΔt+<br />
kβΔt 2 )<br />
<br />
<br />
<br />
<br />
meq<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Δx··<br />
da<br />
t –mΔx··g x··Δt<br />
= – c – k<br />
ΔF()<br />
t dv<br />
t x· Δt + x·· ------- <br />
2 <br />
dd<br />
• In den Spalten C bis E werden zuerst die sogenannten “Prädiktoren”<br />
dd, dv und da bestimmt:<br />
t<br />
t Δt 2<br />
dd = x· Δt+<br />
x·· -------<br />
2<br />
dv<br />
da<br />
=<br />
t<br />
x·· Δt<br />
– mΔx··g– c⋅<br />
dv – k⋅<br />
dd<br />
= ------------------------------------------------------ =<br />
meq<br />
Δx··<br />
(“delta-displacement”)<br />
(“delta-velocity”)<br />
t Δt 2<br />
(“delta-acceleration”)<br />
• In den Spalten F bis H werden anhand von sogenannten “Korrektoren”<br />
die Bewegungsgrössen zum Zeitpunkt t + Δt bestimmt:<br />
t + Δt x··<br />
t + Δt x·<br />
t<br />
= x·· + da<br />
t<br />
= x· + dv + ( da ⋅ γ⋅<br />
Δt)<br />
<br />
<br />
<br />
<br />
<br />
<br />
Δx<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Alessandro Dazio 97<br />
Alessandro Dazio 98
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
t + Δt<br />
x<br />
=<br />
t<br />
x<br />
+<br />
dd + ( da ⋅β ⋅Δt 2 )<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Δx<br />
• In der Spalte I wird schlussendlich die absolute Beschleunigung<br />
x··abs<br />
zum Zeitpunkt t + Δt bestimmt:<br />
t + Δt x·· abs<br />
=<br />
t + Δt<br />
x·· +<br />
t + Δt x·· g<br />
Bemerkungen zur Anwendung der Excel-Tabelle<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Im Feld “Anzahl Perioden” (Zelle V19) wird angegeben für wievielen<br />
Perioden T i<br />
des <strong>EMS</strong> dessen dynamische Antwort berechnet<br />
werden soll, um damit die entsprechenden Antwortspektren zeichnen<br />
zu können.<br />
• Die Antwortspektren werden mit dem Makro “antwortspektrum”<br />
berechnet. Das Makro fügt lediglich die verschiedene<br />
Perioden T i in der Zelle S3 ein; dann liest sie die Maxima der<br />
Antwortgrössen aus der Zellen F6, G6, H6 und I6 heraus und<br />
schreibt sie in den entsprechenden Zellen der Spalten L bis P.<br />
• Die gelb-unterlegten Felder können geändert werden:<br />
• Die Spalten A und B enthalten die Stützwerte im Abstand Δt , die<br />
den Zeitverlauf der Bodenbewegung x··g () t beschreiben, für welche<br />
die Antwort des Einmassenschwingers (<strong>EMS</strong>) zu bestimmen<br />
ist. Um die Antwort des <strong>EMS</strong> infolge einer anderen Bodenbewegung<br />
x·· g () t zu berechnen, müssen diese zwei Spalten mit den<br />
Stützwerten des neuen Erdbebenzeitverlaufs gefüllt werden.<br />
• Das Bewegungsverhalten eines linearen <strong>EMS</strong> ist für einen gegebenen<br />
Erdbebenzeitverlauf x··g () t , nur von seiner Periode<br />
T = 2π ⁄ ω n<br />
und seiner Dämpfung ζ abhängig. Aus diesem Grund<br />
können T und ζ in der Excel-Tabelle ebenfalls frei gewählt werden.<br />
• Die Masse m ist lediglich benötigt, um die tatsächliche Steifigkeit<br />
2<br />
des <strong>EMS</strong> k = m⋅<br />
ω n<br />
zu definieren und daraus die korrekte Federkraft<br />
f s<br />
= k ⋅ x zu berechnet.<br />
Alessandro Dazio 99<br />
Alessandro Dazio 100
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.3 Antwortspektren<br />
[Ba02] Bild 2.25<br />
• Antwortspektren dienen zur Auswertung von Erdbebenaufzeichnungen<br />
aber vor allem, in Form von Bemessungsspektren,<br />
zur Erdbebenbemessung von Bauwerken<br />
• Antwortspektren sollen für alle Perioden und Dämpfungen, die<br />
bei Bauwerken vorkommen, berechnet werden.<br />
• Wo nichts anderes angegeben, beziehen sich die nächsten<br />
Antwortspektren auf die Nord-Süd Komponente des El Centro<br />
Erdbebens vom 18. Mai 1940 ([Cho07]).<br />
• Weitere Zeitverläufe auf:<br />
http://db.cosmos-eq.org/scripts/default.plx<br />
http://peer.berkeley.edu/nga/<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• “El Centro”: Lineare Antwortspektren<br />
Absolute Beschleunigung [m/s 2 ]<br />
Relative Verschiebung [m]<br />
Relative Geschwindigkeit [m/s]<br />
40<br />
30<br />
20<br />
10<br />
0<br />
0.01 0.10 1.00 10.00 100.0<br />
3<br />
2<br />
1<br />
0<br />
0.01 0.10 1.00 10.00 100.0<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
ζ = 0%<br />
ζ = 2%<br />
ζ = 5%<br />
ζ = 10%<br />
ζ = 20%<br />
ζ = 0%<br />
ζ = 2%<br />
ζ = 5%<br />
ζ = 10%<br />
ζ = 20%<br />
ζ = 0%<br />
ζ = 2%<br />
ζ = 5%<br />
ζ = 10%<br />
ζ = 20%<br />
0.01 0.10 1.00 10.00 100.0<br />
Periode [s]<br />
Alessandro Dazio 101<br />
Alessandro Dazio 102
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Grenzwerte von Antwortspektren<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.3.1 Pseudo- Bewegungsgrösse<br />
• Pseudo-Geschwindigkeit<br />
S pv<br />
S pv<br />
=<br />
ωS d<br />
(5.40)<br />
- hat die Einheiten einer Geschwindigkeit<br />
S pv<br />
- ist ein Mass für die maximale Verformungsenergie<br />
S pv<br />
u·· a<br />
+ 2ζωu· + ω 2 u = 0<br />
u·· a<br />
+ 2ζωu· + ω 2 u = 0<br />
u = 0 u··a () t = u·· () t + u··g () t = u··g()<br />
t u·· () t = –·· ug() t ut () = – u g () t<br />
2<br />
kS d<br />
kS (<br />
E s<br />
-------- pv<br />
⁄ ω) 2<br />
= = -------------------------- =<br />
2 2<br />
2<br />
mS<br />
------------ pv<br />
2<br />
(5.41)<br />
ag [m/s 2 ]<br />
2.0<br />
0.0<br />
−2.0<br />
a g,max = 3.13 m/s 2<br />
• Pseudo-Beschleunigung<br />
S pa<br />
= ω 2 S d<br />
(5.42)<br />
vg [m/s]<br />
0 10 20 30<br />
0.4<br />
0.2<br />
0.0<br />
v g,max = 36.1cm/s<br />
S pa<br />
- hat die Einheiten einer Beschleunigung<br />
S pa<br />
- ist ein Mass für die maximale Querkraft<br />
dg [m]<br />
−0.2<br />
0.2<br />
0.1<br />
0.0<br />
0 10 20 30<br />
d g,max = 21.1cm<br />
Aufpassen<br />
Basiskorrektur!<br />
V = kS d<br />
= kS ( pa<br />
⁄ ω 2 ) = mS pa<br />
(5.43)<br />
−0.1<br />
0 10 20 30<br />
Zeit [s]<br />
Alessandro Dazio 103<br />
Alessandro Dazio 104
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Wirkliche vs. Pseudo-Bewegungsgrösse<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Bemerkungen über die Pseudo-Beschleunigung<br />
Absolute Beschleunigung [m/s 2 ]<br />
Relative Geschwindigkeit [m/s]<br />
10<br />
5<br />
0<br />
0.01 0.10 1.00 10.00 100.00<br />
1.0<br />
0.5<br />
ζ = 50%<br />
Beschleunigung<br />
Pseudo-Beschleunigung<br />
ζ = 5%<br />
ζ = 50%<br />
Geschwindigkeit<br />
Pseudo-Geschwindigkeit<br />
ζ = 5%<br />
0.0<br />
0.01 0.10 1.00 10.00 100.00<br />
Periode [s]<br />
• Für ζ = 0 sind Beschleunigung und Pseudo-Beschleunigung<br />
gleich.<br />
• Für T ∞ verschwindet die Pseudo-Geschwindigkeit<br />
• Pseudo-Geschwindigkeit und Pseudo-Beschleunigung entsprechen<br />
in etwa den wirklichen Bewegungsgrössen bei <strong>EMS</strong> mit<br />
ζ < 20% und T < 1s<br />
... / ... max [−]<br />
... / ... max [−]<br />
1.0<br />
0.0<br />
−1.0<br />
1.0<br />
0.0<br />
−1.0<br />
Pseudo-Beschl.<br />
Pseudo-Geschw.<br />
-1 x Verschiebung<br />
0 5 10 15<br />
Pseudo-Beschl.<br />
Pseudo-Geschw.<br />
-1 x Verschiebung<br />
0 5 10 15<br />
Zeit [s]<br />
u··a () t = – ω2 ut ()–<br />
2ζωu· () t<br />
Zeitverlauf der Pseudo-Beschleunigung A(t)<br />
(5.44)<br />
• Für ζ = 0 : ut () = At ()<br />
• Für ζ > 0 : bei u max : u a = A aber A < A max<br />
Verschiebung der Maxima durch die Dämpfung<br />
Alessandro Dazio 105<br />
Alessandro Dazio 106
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Kombinierte doppelt-logarithmische Darstellung<br />
Pseudo−Geschwindigkeit Spv [cm/s]<br />
S pv<br />
S pv<br />
100<br />
= ωS d<br />
log( S pv<br />
) =<br />
log( S pv<br />
) =<br />
log( ) =<br />
S pa<br />
S pv<br />
= ------- log( S<br />
ω<br />
pv<br />
) =<br />
log( S pv<br />
) =<br />
log( ) =<br />
10<br />
1<br />
S pv = 71 cm/s<br />
10000<br />
1000<br />
S pv<br />
S pa = 447 cm/s 2<br />
100<br />
Pseudo−Beschl. S pa [cm/s 2 ]<br />
log( ω)<br />
+ log( S d<br />
)<br />
log()<br />
f + log( 2π)<br />
+ log( S d<br />
)<br />
– log( T)<br />
+ log( 2π)<br />
+ log( )<br />
S d<br />
– log( ω)<br />
+ log( S pa<br />
)<br />
– log( f)<br />
– log( 2π)<br />
+ log( S pa<br />
)<br />
log( T)<br />
– log( 2π)<br />
+ log( S pa )<br />
10<br />
0.1 1 10 100<br />
Verschiebung S d [cm]<br />
T = 1 s<br />
Sd = 11.2 cm<br />
0.1 1.0 10.0<br />
Periode [s]<br />
1<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Eigenschaften von linearen Antwortspektren<br />
Pseudo−Geschwindigkeit Spv [cm/s]<br />
100<br />
10<br />
1<br />
10000<br />
1000<br />
a g = 313 cm/s 2<br />
100<br />
Pseudo−Beschl. S pa [cm/s 2 ]<br />
v g = 36.1 cm/s<br />
0.1 1 10 100<br />
Verschiebung S d [cm]<br />
0.1 1.0 10.0<br />
Periode [s]<br />
• Antwortspektren weisen Bereiche auf, die entweder mehr von<br />
der Bodenbeschleunigung oder von der Bodengeschwindigkeit<br />
oder von der Bodenverschiebung beeinflusst sind.<br />
10<br />
1<br />
d g = 21.1 cm<br />
ζ = 0%<br />
ζ = 2%<br />
ζ = 5%<br />
ζ = 10%<br />
Alessandro Dazio 107<br />
Alessandro Dazio 108
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Median(50%) Eine Stdabw. (84%)<br />
• Nebenbei: Die Figur zeigt warum in der Norm SIA 261 und im<br />
Dämpfung ζ α a<br />
α v<br />
α d<br />
α a<br />
α v<br />
α d EC8 keine Periode T A definiert ist.<br />
2% 2.74 2.03 1.63 3.66 2.92 2.42<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Bemessungs-Antwortspektren nach Newmark<br />
• Elastisches Bemessungsspektrum nach Newmark vs.<br />
g<br />
Elastisches Bemessungsspektrum nach Norm SIA 261<br />
ζ = 5%<br />
3.5<br />
Elastisches Antwortspektrum nach<br />
SIA 261, Boden Typ A<br />
3.0<br />
100<br />
α v v g D<br />
B<br />
C ζ = 5%<br />
2.5<br />
C<br />
v g<br />
2.0<br />
E<br />
10 B<br />
1.5<br />
F<br />
1.0 A<br />
Elastisches Antwortspektrum nach<br />
A<br />
0.5<br />
SIA 261, Boden Typ B<br />
Elastisches Bemessungsspektrum nach<br />
D<br />
1<br />
Newmark (84% Fraktil) mit El-Centro<br />
Eckperioden<br />
0.0<br />
0.01 0.10 1.00 10.00<br />
Periode [s]<br />
T A =1/33s T B =1/8s T E =10s<br />
• Die Spektren für die Norm SIA 261 und für EC8 wurden anhand<br />
0.1 1.0 10.0 T F =33s<br />
ähnlicher Prinzipien wie bei den Newmark-Spektren konstruiert.<br />
Periode [s]<br />
• Es wurden dabei andere Erdbeben ausgewertet.<br />
5% 2.12 1.65 1.39 2.71 2.30 2.01<br />
10% 1.64 1.37 1.20 1.99 1.84 1.69<br />
20% 1.17 1.08 1.01 1.26 1.37 1.38<br />
Pseudo−Geschwindigkeit Spv [cm/s]<br />
10000<br />
1000<br />
α a a g<br />
a g<br />
100<br />
Pseudo−Beschl. S pa [cm/s 2 ]<br />
10<br />
1<br />
αd d g<br />
d g<br />
0.1 1 10 100<br />
Verschiebung S d [cm]<br />
Spa / Ag [−]<br />
Alessandro Dazio 109<br />
Alessandro Dazio 110
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.4 Kurze Anregung<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Sprungfunktion: T n =2s, F o /k=2, ζ=0<br />
5.4.1 Sprungfunktion<br />
Die Differentialgleichung eines ungedämpften <strong>EMS</strong> belastet mit<br />
einer Kraft F 0<br />
, die zur Zeit t = 0 plötzlich aufgebracht wird, ist:<br />
mu··<br />
+ ku = F 0<br />
Es gibt eine homogene und eine partikuläre Lösung<br />
(5.45)<br />
Verschiebung<br />
4.5<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
Dynamische Antwort<br />
Rechteckanregung<br />
u h<br />
= A 1<br />
cos( ω n<br />
t)<br />
+ A 2<br />
sin( ω n<br />
t)<br />
u p<br />
= F 0<br />
⁄ k<br />
(siehe freie <strong>Schwingungen</strong>) (5.46)<br />
(5.47)<br />
Die Gesamtlösung ist ut () = u h<br />
+ u p<br />
wird durch die Anfangsbedingungen<br />
u0 ( ) = u· ( 0) = 0 vollständig definiert und sie ist:<br />
ut ()<br />
=<br />
F<br />
----- 0<br />
[ 1 – cos( ω<br />
k<br />
n<br />
t)<br />
]<br />
(5.48)<br />
• Bemerkungen<br />
• Der gedämpfte Fall kann genau gleich gelöst werden. Auf der Web<br />
Seite der Vorlesung gibt es eine Excel Datei zur Veranschaulichung<br />
dieser Anregung.<br />
• Die maximale Auslenkung eines ungedämpften <strong>EMS</strong> unter einer<br />
Sprungbelastung beträgt zwei Mal die statische Auslenkung<br />
u st<br />
= F 0<br />
⁄ k<br />
• Die Auslenkung zur Zeit t = ∞ eines gedämpften <strong>EMS</strong> unter einer<br />
Sprungbelastung ist gleich der statischen Auslenkung u st<br />
= F 0<br />
⁄ k<br />
1<br />
0.5<br />
0<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
• Sprungfunktion: T n =2s, F o /k=2, ζ=10%<br />
Verschiebung<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
Dynamische Antwort<br />
Rechteckanregung<br />
Alessandro Dazio 111<br />
Alessandro Dazio 112
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Dreiecksanregung: I = 0.5F 0<br />
t 1<br />
und anhand der Anfangsbedingungen (5.50) und (5.51) können<br />
t<br />
die Konstanten A 1<br />
und A 2<br />
bestimmt werden.<br />
• Beliebige kurze Anregung: I =<br />
1<br />
F() t dt<br />
5.4.2 Rechteckanregung<br />
• Kurze Anregungsdauer ( t 1 ⁄ T n ist klein)<br />
Die Reihenentwicklung von Sinus und Cosinus ist:<br />
cos( ω n t 1 ) 2π<br />
----- t <br />
( ω n t 1 ) 2<br />
= cos<br />
T 1<br />
= 1 – ----------------- + …<br />
n 2<br />
(5.53)<br />
sin( ω n<br />
t 1<br />
) ----- 2π<br />
t <br />
( ω n<br />
t 1<br />
) 3<br />
= sin<br />
T 1<br />
= ω n n<br />
t 1<br />
+ ----------------- + …<br />
6<br />
(5.54)<br />
Die DGL eines ungedämpften <strong>EMS</strong> unter einer Rechteckanregung<br />
und für kleine t 1<br />
⁄ T n vereinfachen sich die Ausdrücke zu:<br />
ist:<br />
cos( ω n<br />
t 1<br />
) ≅ 1 , sin( ω n<br />
t 1<br />
) ≅ ω n<br />
t 1<br />
(5.55)<br />
mu·· + ku = F 0<br />
für t ≤ t 1<br />
<br />
mu··<br />
(5.49)<br />
Durch Einsetzen von Gleichung (5.55) in Gleichungen (5.50)<br />
+ ku = 0 für t > t 1<br />
und (5.51) es ergibt sich:<br />
Bis zur Zeit t = t 1<br />
entspricht die Lösung der DGL Gleichung<br />
F<br />
, 0 2 F<br />
ut (<br />
(5.48). Ab Zeit t = t 1<br />
handelt es sich um eine freie Schwingung<br />
1<br />
) = 0<br />
u· ( t 1<br />
) ----- 0<br />
t 1<br />
= ω<br />
k nt1 = ---------<br />
m<br />
(5.56)<br />
mit Anfangsbedingungen<br />
Gleichung (5.56) zeigt, dass eine kurze Anregung als eine freie<br />
F 0<br />
Schwingung mit Anfangeschwindigkeit<br />
ut ( 1<br />
) = ----- [ 1 – cos( ω (5.50)<br />
k<br />
n<br />
t 1<br />
)]<br />
v 0<br />
= I ⁄ m<br />
(5.57)<br />
F 0<br />
u· ( t 1 ) = ----- ω (5.51)<br />
k n sin( ω n t 1 )<br />
interpretiert werden kann. I ist der Impuls, der von der Kraft F 0<br />
während der Zeit t 1<br />
erzeugt wird.<br />
Die freie Schwingung ist durch folgende Gleichung beschrieben:<br />
u h = A 1 cos( ω n ( t – t 1 ))<br />
+ A 2 cos( ω n ( t–<br />
t 1 ))<br />
(5.52)<br />
• Rechteckanregung: I = F 0<br />
t 1<br />
0<br />
Alessandro Dazio 113<br />
Alessandro Dazio 114
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Die Gleichung einer ungedämpften freien Schwingung ist:<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Rechteckanregung: T n =2s, t 1 =0.5s (t 1 /T n =0.25), F o /k=2, ζ=0%<br />
v<br />
ut () = Acos( ω n<br />
t – φ)<br />
mit 0<br />
A = u + 0<br />
----- und<br />
<br />
<br />
2 tanφ<br />
ω n<br />
=<br />
v 0<br />
-----------<br />
ω n<br />
u 0<br />
(5.58)<br />
4<br />
3<br />
2<br />
Dynamische Antwort<br />
Rechteckanregung<br />
Deshalb beträgt die maximale Amplitude einer kurzen Anregung:<br />
A<br />
=<br />
v 0<br />
-----<br />
ω n<br />
(5.59)<br />
• Bemerkungen<br />
• Der gedämpfte Fall kann genau gleich gelöst werden. Auf der Web<br />
Seite der Vorlesung gibt es eine Excel Datei zur Veranschaulichung<br />
dieser Anregung.<br />
• Rechteckanregung: Wenn t 1<br />
> T n<br />
⁄ 2, beträgt die maximale Antwort<br />
des <strong>EMS</strong> zwei Mal die statischen Auslenkung u st = F 0 ⁄ k<br />
• Rechteckanregung: Wenn t 1 > T n ⁄ 2 , kann die maximale Amplitude<br />
des <strong>EMS</strong> für gewisse Verhältnisse von t 1 ⁄ T n (z.B.: 0.5, 1.5, ...)<br />
sogar 4F 0 ⁄ k betragen.<br />
• Rechteckanregung mit Dämpfung: selber ausprobieren anhand<br />
der angegebenen Excel-Tabelle.<br />
• Kurze Anregung: Die Form der Anregung hat praktisch keinen Einfluss<br />
auf die maximale Antwort des <strong>EMS</strong>. Wichtig ist der Impuls.<br />
• Kurze Anregung: Gleichung (5.59) stimmt nur für t 1 ⁄ T n → 0 und<br />
ζ = 0. Für alle andere Fälle handelt es sich erst um eine Näherung,<br />
die die tatsächliche maximale Auslenkung überschätzt.<br />
Verschiebung<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
• Rechteckanregung: T n =2s, t 1 =1s (t 1 /T n =0.50), F o /k=2, ζ=0%<br />
Verschiebung<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
-5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
Dynamische Antwort<br />
Rechteckanregung<br />
Alessandro Dazio 115<br />
Alessandro Dazio 116
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Rechteckanregung: T n =2s, t 1 =2s (t 1 /T n =1.00), F o /k=2, ζ=0%<br />
• Rechteckanregung: T n =2s, t 1 =3.5s (t 1 /T n =1.75), F o /k=2, ζ=0%<br />
Verschiebung<br />
4.5<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Dynamische Antwort<br />
Rechteckanregung<br />
Verschiebung<br />
5<br />
4<br />
3<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
Dynamische Antwort<br />
Rechteckanregung<br />
0<br />
-3<br />
-0.5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
• Rechteckanregung: T n =2s, t 1 =3s (t 1 /T n =1.50), F o /k=2, ζ=0%<br />
-4<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
• Rechteckanregung: T n =2s, t 1 =4s (t 1 /T n =2.00), F o /k=2, ζ=0%<br />
5<br />
4<br />
3<br />
Dynamische Antwort<br />
Rechteckanregung<br />
4.5<br />
4<br />
3.5<br />
Dynamische Antwort<br />
Rechteckanregung<br />
Verschiebung<br />
2<br />
1<br />
0<br />
-1<br />
-2<br />
-3<br />
-4<br />
-5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
Verschiebung<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
-0.5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
Alessandro Dazio 117<br />
Alessandro Dazio 118
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Kurze Rechteckanregung: T n =2s, t 1 =0.05s, F o /k=2, ζ=0%<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
5.4.3 Beispiel “Sprengeinwirkung” (siehe Einführung)<br />
2.5<br />
2<br />
Dynamische Antwort<br />
Rechteckanregung<br />
•Versuch<br />
Verschiebung<br />
1.5<br />
1<br />
0.5<br />
0<br />
-0.5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
• Kurze Rechteckanregung: T n =2s, t 1 =0.05s, F o /k=2, ζ=5%<br />
Verschiebung<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Dynamische Antwort<br />
Rechteckanregung<br />
• Modellierung Variante 1<br />
Im Rahmen einer vereinfachten Modellierung wird angenommen,<br />
dass die Platte während der Belastung elastisch bleibt.<br />
Gesucht ist die maximale Einsenkung der Platte infolge der Explosion.<br />
- Vereinfachtes System<br />
Querschnitt<br />
0<br />
-0.5<br />
0 1 2 3 4 5 6 7 8 9 10<br />
Zeit (s)<br />
Alessandro Dazio 119<br />
Alessandro Dazio 120
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Masse:<br />
m = 3.05 ⋅ 0.276 ⋅ 2.45 = 2.06t ⁄ m<br />
Randbedingungen:<br />
Beton: f c<br />
' = 41.4MPa , E c<br />
= 5000 ⋅ f c<br />
' = 32172MPa<br />
Steifigkeit:<br />
- Einwirkung<br />
I o ( 3050 ⋅ 276 3<br />
6<br />
= ) ⁄ 12 = 5344×10 mm 4<br />
E c<br />
I o<br />
= 171.9kNm 2<br />
E c I = 0.30E c I o = 52184kNm 2<br />
(wegen Rissebildung!)<br />
t 1 ≈ 0.3ms ist sicher wesentlich<br />
kleiner als die Periode<br />
T n<br />
= 64ms der Platte (siehe<br />
Gleichung (5.71)). Deshalb<br />
kann die Anregung als<br />
“kurz” betrachtet werden.<br />
- Äquivalenter modaler <strong>EMS</strong> (siehe Abschnitt “Modellbildung”)<br />
ψ( 0) = 0 , ψ( L) = 0 , ψ' ( 0) = 0 , ψ'' ( L) = 0<br />
(5.61)<br />
Mit dem Mathematikprogramm “Maple” kann Gleichung (5.60)<br />
für die Randbedingungen (5.61) gelöst werden und es ergibt<br />
sich:<br />
mit<br />
1.508 ⋅ ψ<br />
[ sin( βL)<br />
+ sinh( βL)<br />
] ⋅ [ cos( βx)<br />
– cosh( βx)<br />
]<br />
= sin( βx)<br />
– sinh( βx)<br />
+ -----------------------------------------------------------------------------------------------------------------<br />
– cos( βL)<br />
– cosh( βL)<br />
Der Verlauf der Funktion ψ ist:<br />
[-]<br />
βL = 3.927<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
(5.62)<br />
(5.63)<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
x/L [-]<br />
Ansatz für die Verformungsfigur:<br />
ψ = C1 ⋅ sin( βx)<br />
+ C2 ⋅ cos( βx)<br />
+ C3 ⋅ sinh( βx)<br />
+ C4 ⋅ cosh( βx)<br />
(5.60)<br />
Und mit den Gleichungen aus Kapitel “Modelbildung” können die<br />
modalen Eigenschaften des äquivalenten <strong>EMS</strong> bestimmt werden:<br />
<br />
L<br />
m * = m ⋅ ψ 2 ⋅dx<br />
= 0.439mL<br />
0<br />
(5.64)<br />
Alessandro Dazio 121<br />
Alessandro Dazio 122
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
k * L<br />
= ( EI ⋅ ( ψ'' ) 2 ⋅ dx)<br />
= 104.37 ⋅ -----<br />
EI<br />
0<br />
L 2 =3.45m<br />
(5.65)<br />
(5.66)<br />
Für dieses Beispiel sind die modalen Grössen, die den äquivalenten<br />
modalen <strong>EMS</strong> charakterisieren:<br />
L 3<br />
P * = ( p ⋅ ψ ⋅dx)<br />
= 0.888 ⋅ P tot<br />
L 1 =1.55m<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Modellierung Variante 2<br />
Im Rahmen einer vereinfachten Modellierung wird angenommen,<br />
dass die Platte während der Belastung elastisch bleibt.<br />
Gesucht ist die maximale Einsenkung der Platte infolge der Explosion.<br />
- Vereinfachtes System<br />
m * = 0.439 ⋅ 2.06 ⋅5<br />
= 4.52t<br />
(5.67)<br />
k * = 104.37 ⋅ --------------<br />
52184 =<br />
5 3<br />
P * = 0.888 ⋅ 192000 =<br />
43571kN/m<br />
170496kN<br />
(5.68)<br />
(5.69)<br />
ω = k * ⁄ m * = 43571 ⁄ 4.52 = 98.18rad/s<br />
T n<br />
= 2π ⁄ ω = 0.064s<br />
(5.70)<br />
(5.71)<br />
- Äquivalenter modaler <strong>EMS</strong> (siehe Abschnitt “Modellbildung”)<br />
Die maximale elastische Verformung des <strong>EMS</strong> kann anhand des<br />
modalen Impuls berechnet werden und zwar:<br />
I * = 0.5 ⋅ P * ⋅ t 0 = 0.5 ⋅170496 ⋅ 0.3×10<br />
= 25.6kNs<br />
Die Anfangsgeschwindigkeit der freien Schwingung ist:<br />
I<br />
v * 25.6<br />
0<br />
= ------ = --------- = 5.66m/s<br />
4.52<br />
m *<br />
Die maximale elastische Auslenkung ist:<br />
Δ me<br />
, = v 0 ⁄ ω = 5.66 ⁄ 98.18 = 0.058m<br />
–3<br />
(5.72)<br />
(5.73)<br />
(5.74)<br />
Ansatz für die Verformungsfigur:<br />
ψ<br />
2πx<br />
= –sin ---------<br />
<br />
L <br />
<br />
Randbedingungen:<br />
(5.75)<br />
ψ( 0) = 0 , ψ( L) = 0 , ψ'' ( 0) = 0 , ψ'' ( L) = 0<br />
(5.76)<br />
Alessandro Dazio 123<br />
Alessandro Dazio 124
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Der Verlauf der Funktion ψ ist:<br />
P * = 0.941 ⋅ 192000 =<br />
180672kN<br />
(5.82)<br />
ψ [-]<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
-0.4<br />
-0.6<br />
-0.8<br />
-1<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
x/L [-]<br />
Und mit den Gleichungen aus Kapitel “Modelbildung” können die<br />
modalen Eigenschaften des äquivalenten <strong>EMS</strong> bestimmt werden:<br />
<br />
L<br />
m * = m ⋅ ψ 2 ⋅ dx<br />
= 0.5mL<br />
0<br />
k * L<br />
= ( EI ⋅ ( ψ'' ) 2 ⋅ dx)<br />
= 8π 4 ⋅ -----<br />
EI = 779.27 ⋅ -----<br />
EI<br />
0<br />
L 3<br />
L 3<br />
(5.77)<br />
(5.78)<br />
ω = k * ⁄ m * = 40666 ⁄ 10.3 = 62.83rad/s<br />
T n<br />
= 2π ⁄ ω = 0.10s<br />
(5.83)<br />
(5.84)<br />
Die maximale elastische Verformung des <strong>EMS</strong> kann anhand des<br />
modalen Impuls berechnet werden und zwar:<br />
I * = 0.5 ⋅ P * ⋅ t 0 = 0.5 ⋅180672 ⋅ 0.3×10<br />
= 27.1kNs<br />
Die Anfangsgeschwindigkeit der freien Schwingung ist:<br />
I<br />
v *<br />
0<br />
------<br />
27.1<br />
= = --------- = 2.63m/s<br />
10.3<br />
Die maximale elastische Auslenkung ist:<br />
Δ me<br />
m *<br />
, = v 0 ⁄ ω = 2.63 ⁄ 62.83 = 0.042m<br />
–3<br />
(5.85)<br />
(5.86)<br />
(5.87)<br />
L 2 =8.45m<br />
P * = ( p ⋅ ψ ⋅dx)<br />
= 0.941 ⋅ P tot<br />
L 1 =6.55m<br />
(5.79)<br />
Für dieses Beispiel sind die modalen Grössen, die den äquivalenten<br />
modalen <strong>EMS</strong> charakterisieren:<br />
m * = 0.5 ⋅ 2.06 ⋅ 10 = 10.3t<br />
(5.80)<br />
k * = 779.27 ⋅ --------------<br />
52184<br />
10 3 =<br />
40666kN/m<br />
(5.81)<br />
Alessandro Dazio 125<br />
Alessandro Dazio 126
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
• Modellierung Variante 3<br />
Als dritte Variante wird die Platte mit finiten Elementen in SAP<br />
2000 modelliert.<br />
- Numerisches Model<br />
Tragwerksdynamik und Schwingungsprobleme HS 09<br />
Und der Verlauf der elastische Auslenkung ist:<br />
Elastische Auslenkung [m]<br />
0.08<br />
0.06<br />
0.04<br />
0.02<br />
0<br />
-0.02<br />
-0.04<br />
-0.06<br />
-0.08<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50<br />
Zeit [s]<br />
Die verteilte Belastung q wird anhand von n = 19 konzentrierten<br />
Kräften ersetzt:<br />
F i<br />
192000<br />
F i<br />
= ----------------- = 10105kN<br />
19<br />
Die erste Periode des Systems beträgt:<br />
T 1<br />
= 0.100s<br />
was Gleichung (5.84) entspricht.<br />
(5.88)<br />
(5.89)<br />
Der Einfluss der oberen Eigenschwingungen ist deutlich zu erkennen!<br />
• Vergleich<br />
System<br />
m* k* P* T Δ m,<br />
e<br />
[t] [kN/m] [P] [s] [m]<br />
4.52 43571 0.888 0.064 0.058<br />
10.30 40666 0.941 0.100 0.042<br />
- - - 0.100 0.064<br />
Alessandro Dazio 127<br />
Alessandro Dazio 128