Bachelorarbeit - Thomas Elser (Hochschule Ulm)
Bachelorarbeit - Thomas Elser (Hochschule Ulm) Bachelorarbeit - Thomas Elser (Hochschule Ulm)
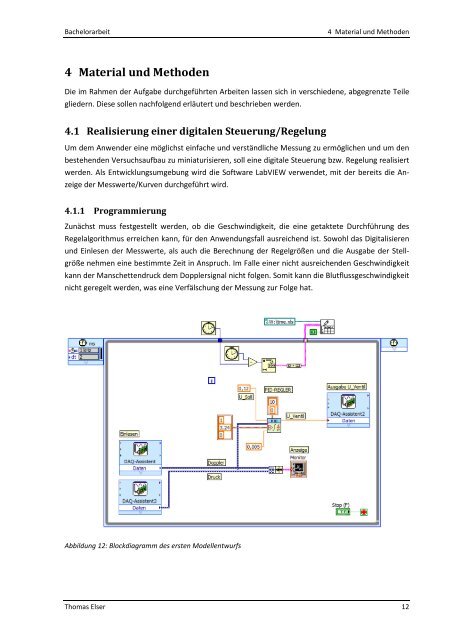
Bachelorarbeit 4 Material und Methoden 4 Material und Methoden Die im Rahmen der Aufgabe durchgeführten Arbeiten lassen sich in verschiedene, abgegrenzte Teile gliedern. Diese sollen nachfolgend erläutert und beschrieben werden. 4.1 Realisierung einer digitalen Steuerung/Regelung Um dem Anwender eine möglichst einfache und verständliche Messung zu ermöglichen und um den bestehenden Versuchsaufbau zu miniaturisieren, soll eine digitale Steuerung bzw. Regelung realisiert werden. Als Entwicklungsumgebung wird die Software LabVIEW verwendet, mit der bereits die Anzeige der Messwerte/Kurven durchgeführt wird. 4.1.1 Programmierung Zunächst muss festgestellt werden, ob die Geschwindigkeit, die eine getaktete Durchführung des Regelalgorithmus erreichen kann, für den Anwendungsfall ausreichend ist. Sowohl das Digitalisieren und Einlesen der Messwerte, als auch die Berechnung der Regelgrößen und die Ausgabe der Stellgröße nehmen eine bestimmte Zeit in Anspruch. Im Falle einer nicht ausreichenden Geschwindigkeit kann der Manschettendruck dem Dopplersignal nicht folgen. Somit kann die Blutflussgeschwindigkeit nicht geregelt werden, was eine Verfälschung der Messung zur Folge hat. Abbildung 12: Blockdiagramm des ersten Modellentwurfs Thomas Elser 12
Bachelorarbeit 4 Material und Methoden Für den ersten Aufbau ergibt sich das Blockdiagramm in Abbildung 12. Die Basis der Software bildet eine zeitgesteuerte Schleife, welche den Regelalgorithmus zyklisch ausführen soll. Die Frequenz dieser Schleife wird auf 500Hz festgelegt, um eine Periodendauer von 2ms zu erreichen. In der Schleife werden mittels zweier DAQ-Express-VIs (Schnittstelle zur USB-Messkarte) das Dopplersignal sowie der aktuelle Manschettendruck eingelesen. Diese Signale werden mittels Funktionsgraphen auf dem Bildschirm dargestellt. Die Berechnung des Regelalgorithmus geschieht durch den PID-Block, einem von National Instruments vorbereiteten VI. Das errechnete Stellsignal wird durch einen weiteren DAQ-Block ausgegeben. Eine zusätzliche Funktion bildet die Einrichtung einer Timer-Struktur, welche bei jedem Durchlauf die seit dem Start abgelaufene Zeit in Millisekunden protokolliert. Somit können die Periodendauer und daraus die tatsächlich erreichte Frequenz der zeitgesteuerten Schleife ermittelt werden. Eine erste Testmessung ergibt eine Periodendauer zwischen 20 und 50ms. Deshalb wird versucht, die Performance durch verschiedene Maßnahmen zu verbessern: • Es wird festgestellt, dass beim Einlesen und Ausgeben der Signale unter Verwendung des DAQ- Assistenten (Express-VI) eine erhebliche Zeitverzögerung entsteht. Dies ist der Fall, da bei diesen Funktionsblöcken bei jedem Aufruf (also bei jeder Iteration der zeitgesteuerten Schleife) die Schnittstelle neu initialisiert wird. Diese VIs werden deshalb durch andere Elemente aus der DAQmx-Palette ersetzt. Vor dem ersten Aufruf der Schleife wird nun zunächst je eine Referenz für die Ein- und Ausgabe erzeugt. Hierin werden die physikalischen Adressen der Messkanäle (z.B. Analog-In 6 oder Analog-Out 1), die einzulesenden oder auszugebenden physikalischen Größen (z.B. Spannung) und die Art der elektrischen Verschaltung (z.B. differentiell) festgelegt. Während der Schleifeniteration muss nun lediglich ein Funktionsblock aufgerufen werden, der die zur angegebenen Referenz zugehörige Spannung als Wertearray ausliest (Read-Befehl) bzw. den Spannungswert über die Schnittstelle ausgibt (Write-Befehl). Am Ende des Programmablaufs werden die Schnittstellen durch Stoppen der Referenzen zurückgesetzt. • Das Timing der zeitgesteuerten Schleife wird zunächst ebenfalls über einen Assistenten eingestellt. Dies hat zur Folge, dass beim Ausführen als Zeitbasis der interne Timer des Betriebssystems verwendet wird, was eine unregelmäßige Taktverzögerung oder -verschiebung nach sich zieht. Diese entsteht hauptsächlich aufgrund im Hintergrund ablaufender Prozesse. Durch die Verwendung eines externen Zählers, der die Schleifeniterationen steuert, kann der Takt regelmäßiger und schneller durchgeführt werden. Abbildung 13: Optimierung der Regelschleife - Zeitsteuerung Messschleife Thomas Elser 13
- Seite 1 und 2: Fakultät Mechatronik und Medizinte
- Seite 3 und 4: Bachelorarbeit Eidesstattliche Erkl
- Seite 5 und 6: Bachelorarbeit Zusammenfassung Die
- Seite 7 und 8: Bachelorarbeit Inhaltsverzeichnis E
- Seite 9 und 10: Bachelorarbeit 1 Einleitung 1 Einle
- Seite 11 und 12: Bachelorarbeit 2 Grundlagen 2.1.2.1
- Seite 13 und 14: Bachelorarbeit 2 Grundlagen Von R.
- Seite 15 und 16: Bachelorarbeit 2 Grundlagen Abbildu
- Seite 17 und 18: Bachelorarbeit 2 Grundlagen 2.5 Val
- Seite 19: Bachelorarbeit 3 Aufgabenstellung E
- Seite 23 und 24: Bachelorarbeit 4 Material und Metho
- Seite 25 und 26: Bachelorarbeit 4 Material und Metho
- Seite 27 und 28: Bachelorarbeit 4 Material und Metho
- Seite 29 und 30: Bachelorarbeit 4 Material und Metho
- Seite 31 und 32: Bachelorarbeit 4 Material und Metho
- Seite 33 und 34: Bachelorarbeit 4 Material und Metho
- Seite 35 und 36: Bachelorarbeit 5 Ergebnisse Abbildu
- Seite 37 und 38: Bachelorarbeit 5 Ergebnisse Abbildu
- Seite 39 und 40: Bachelorarbeit 5 Ergebnisse • Die
- Seite 41 und 42: Bachelorarbeit 6 Diskussion und Aus
- Seite 43 und 44: Bachelorarbeit 6 Diskussion und Aus
- Seite 45 und 46: Bachelorarbeit Anhang Klick Button
- Seite 47 und 48: Bachelorarbeit Anhang kontinuierlic
- Seite 49 und 50: Bachelorarbeit Anhang Herzfrequenz
- Seite 51 und 52: Bachelorarbeit Anhang 7.1.3 Blockdi
- Seite 53 und 54: Bachelorarbeit Anhang 7.2.1.2 Schal
- Seite 55 und 56: Bachelorarbeit Anhang 7.2.1.4 Pneum
- Seite 57 und 58: Bachelorarbeit Anhang 7.2.2.2 Rück
- Seite 59 und 60: Bachelorarbeit Anhang 7.4 Testmessu
- Seite 61 und 62: Bachelorarbeit Anhang Abbildungsver
- Seite 63: Bachelorarbeit Anhang Lebenslauf Pe
<strong>Bachelorarbeit</strong><br />
4 Material und Methoden<br />
4 Material und Methoden<br />
Die im Rahmen der Aufgabe durchgeführten Arbeiten lassen sich in verschiedene, abgegrenzte Teile<br />
gliedern. Diese sollen nachfolgend erläutert und beschrieben werden.<br />
4.1 Realisierung einer digitalen Steuerung/Regelung<br />
Um dem Anwender eine möglichst einfache und verständliche Messung zu ermöglichen und um den<br />
bestehenden Versuchsaufbau zu miniaturisieren, soll eine digitale Steuerung bzw. Regelung realisiert<br />
werden. Als Entwicklungsumgebung wird die Software LabVIEW verwendet, mit der bereits die Anzeige<br />
der Messwerte/Kurven durchgeführt wird.<br />
4.1.1 Programmierung<br />
Zunächst muss festgestellt werden, ob die Geschwindigkeit, die eine getaktete Durchführung des<br />
Regelalgorithmus erreichen kann, für den Anwendungsfall ausreichend ist. Sowohl das Digitalisieren<br />
und Einlesen der Messwerte, als auch die Berechnung der Regelgrößen und die Ausgabe der Stellgröße<br />
nehmen eine bestimmte Zeit in Anspruch. Im Falle einer nicht ausreichenden Geschwindigkeit<br />
kann der Manschettendruck dem Dopplersignal nicht folgen. Somit kann die Blutflussgeschwindigkeit<br />
nicht geregelt werden, was eine Verfälschung der Messung zur Folge hat.<br />
Abbildung 12: Blockdiagramm des ersten Modellentwurfs<br />
<strong>Thomas</strong> <strong>Elser</strong> 12


