gesamtes Skript (PDF, 3,4 MB) - TU Berlin
gesamtes Skript (PDF, 3,4 MB) - TU Berlin
gesamtes Skript (PDF, 3,4 MB) - TU Berlin

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Hochfrequenztechnik II<br />
Vorlesungsskript<br />
2012<br />
Fachgebiet Hochfrequenztechnik<br />
Prof. Dr.-Ing. Klaus Petermann<br />
überarbeitet unter Mitarbeit von<br />
Dr.-Ing. Christian-Alexander Bunge
Die Vorlesung Hochfrequenztechnik II beinhaltet die folgenden<br />
Abschnitte:<br />
ML: Mehrleitersysteme<br />
FI: Hochfrequenzfilter<br />
RÜ: Rückkopplung von Verstärkern<br />
MI: Mischer<br />
MOD: Modulationsverfahren<br />
PLL: Phasenregelkreise
Literaturhinweise<br />
Der gesamte Bereich der Hochfrequenztechnik wird recht umfassend dargestellt in:<br />
Zinke, O., Brunswig, H., (Hrsg. Von A. Vlcek u. H.L. Hartnagel):<br />
Lehrbuch der Hochfrequenztechnik, Band 1 und Band 2,<br />
Springer-Verlag <strong>Berlin</strong>, 6. Auflage bzw. 5. Auflage, 2000 bzw. 1999<br />
Umfassendes Handbuch über die gesamte Hochfrequenztechnik:<br />
Meinke, Gundlach:<br />
Taschenbuch der Hochfrequenztechnik,<br />
Springer-Verlag, <strong>Berlin</strong>, 5. Auflage 1992<br />
Für das Selbststudium eignet sich:<br />
Voges, E.:<br />
Hochfrequenztechnik<br />
Hüthig Verlag, Heidelberg, 3. Auflage 2003<br />
Sonstige Literatur:<br />
Detlefsen, I., Siart, K.:<br />
Grundlagen der Hochfrequenztechnik,<br />
Oldenbourg Verlag, 2. Auflage 2006<br />
Hoffmann, M.:<br />
Hochfrequenztechnik, ein systemtheoretischer Zugang,<br />
Springer-Verlag, <strong>Berlin</strong> Heidelberg 1997<br />
Nibler, F.:<br />
Hochfrequenzschaltungstechnik,<br />
Expert Verlag, 3. Auflage 1998<br />
Unger, H.G.:<br />
Hochfrequenztechnik in Funk und Radar,<br />
Teubner Verlagsgesellschaft Stuttgart, 4. Auflage 1994<br />
Zimmer, G.:<br />
Hochfrequenztechnik, Lineare Modelle (mit Windows Software),<br />
Springer Verlag, <strong>Berlin</strong> Heidelberg, 2000<br />
Best, R.E.<br />
Phased-Locked Loops: Design, Simulation, and Applications<br />
McGraw-Hill, New York, 6. Auflage 2007<br />
Williams, A.B., Taylor, F.J.:<br />
Electronic Filter Design Handbook<br />
McGraw-Hill, New York, 4. Auflage 2006<br />
Wolaver, D.H.<br />
Phase-Locked Loop Circuit Design<br />
Prentice Hall PTR, 1991<br />
Ein Filter-Design Programm ist frei verfügbar über: http://www.aade.com/filter.htm
Hochfrequenztechnik II Mehrleitersysteme ML/1<br />
Die bisher behandelten Leitungen bestanden aus 2 Leitern (Zweidrahtleitungen), wobei viele Leitungssysteme<br />
auch aus mehr als 2 Leitern bestehen können. Es kommt dann erwünscht (Beispiel: Richtkoppler)<br />
oder auch unerwünscht (Nebensprechen) zu einer Verkopplung zwischen den Leitungen. Um eine<br />
systematische Behandlung zu ermöglichen, sollen hier Mehrleitersysteme genauer analysiert werden.<br />
1 Leitungsgleichungen für Mehrleitersysteme<br />
Zur Veranschaulichung werde ein 3-Leiter-System gemäß Abb. 1 betrachtet.<br />
Abb. 1: 3-Leiter-System.<br />
Die einzelnen Leiter in Abb. 1 sind mit 0,1,2 bezeichnet, wobei der Leiter 0 als Masseleiter interpretiert<br />
werden kann. Es handelt sich somit in Abb. 1 um 2 miteinander verkoppelte Leitungen, wobei die eine<br />
Leitung (im folgenden Leitung 1) durch die Leiter 0,1 und die andere Leitung (im folgenden Leitung 2)<br />
durch die Leiter 0,2 gegeben ist, charakterisiert durch die jeweiligen Eigeninduktivitätsbeläge L ′ 11 bzw.<br />
L ′ 22 und die jeweiligen Kapazitätsbeläge c′ 10 bzw. c′ 20 . Das Leitungssystem in Abb. 1 enthält keine<br />
Verluste, die sich aber durch Berücksichtigung entsprechender Widerstands- und Leitwertsbeläge leicht<br />
einfügen ließen (siehe z.B. H. G. Unger, „Elektromagnetische Wellen auf Leitungen“).<br />
Die Verkopplung zwischen den Leitungen 1 und 2 in Abb. 1 erfolgt einerseits über den Gegeninduktivitätsbelag<br />
L ′ 12 (ein Teil des magnetischen Flusses von Leitung 1 durchsetzt auch Leitung 2 und<br />
umgekehrt) und andererseits den Koppelkapazitätsbelag c 12 ′ (Kapazität zwischen den Leitern 1,2).<br />
Für die Spannungs- und Stromzeiger U 1 (z), U 2 (z) bzw. I 1 (z), I 2 (z) der Leitungen 1 und 2 ergeben<br />
sich dann ähnlich wie im Abschnitt LEI die Leitungsgleichungen:<br />
dU 1<br />
dz<br />
dU 2<br />
dz<br />
= −I 1 (z)jωL ′ 11 − I 2 (z)jωL ′ 12 (1)<br />
= −I 1 (z)jωL ′ 12 − I 2 (z)jωL ′ 22 (2)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/2<br />
sowie<br />
dI 1<br />
dz<br />
dI 2<br />
dz<br />
= −U 1 (z)jωc ′ 10 − [ U 1 (z) − U 2 (z) ] jωc ′ 12 (3)<br />
= −U 2 (z)jωc ′ 20 − [ U 2 (z) − U 1 (z) ] jωc ′ 12 (4)<br />
Wenn man die Spannungen und Ströme in Gl. (1)-(4) zu Spaltenvektoren gemäß<br />
⎛ ⎞ ⎛ ⎞<br />
(U) = ⎝ U 1 ⎠ , (I) = ⎝ I 1 ⎠ (5)<br />
U 2 I 2<br />
zusammenfasst, lassen sich Gl. (1)-(4) auch in Matrizenform schreiben gemäß<br />
d(U)<br />
dz<br />
d(I)<br />
dz<br />
mit der symmetrischen Matrix (L ′ ) der Induktivitätsbelagskoeffizienten<br />
(L ′ ) =<br />
= −jω(L ′ )(I) (6)<br />
= −jω(C ′ )(U) (7)<br />
⎛<br />
⎝ L′ 11 L ′ 12<br />
L ′ 21 L ′ 22<br />
⎞<br />
⎠ (8)<br />
mit L ′ 12 = L′ 21<br />
mit<br />
und der ebenfalls symmetrischen Matrix der Kapazitätsbelagskoeffizienten<br />
(C ′ ) =<br />
⎛<br />
⎝ C′ 11 C 12<br />
′<br />
C 21 ′ C 22<br />
′<br />
⎞<br />
⎠ (9)<br />
C ′ 11 = c ′ 10 + c ′ 12 ; C ′ 22 = c ′ 20 + c ′ 12 ; C ′ 12 = C ′ 21 = −c ′ 12 (10)<br />
2 Verallgemeinerung auf n verkoppelte Leitungen<br />
Wenn man das 3-Leiter-System von Abb. 1 auf ein (n+1)-Leiter-System erweitert, erhält man n<br />
miteinander gekoppelte Leitungen (jeweils gebildet von Leiter i = 1 . . . n mit dem Masseleiter 0), die<br />
auch wieder mit einem Spannungsvektor<br />
⎛ ⎞<br />
U 1<br />
(U) = ⎜<br />
⎝<br />
. ⎟<br />
(11)<br />
⎠<br />
U n<br />
und einem Stromvektor<br />
⎛<br />
(I) = ⎜<br />
⎝<br />
⎞<br />
I 1<br />
. ⎟<br />
⎠<br />
I n<br />
(12)<br />
beschrieben werden können. Der Zusammenhang zwischen (U) und (I) ist durch die Leitungsgleichungen<br />
(6),(7) gegeben, wobei (L ′ ), (C ′ ) symmetrische quadratische Matrizen der Ordnung n darstellen.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/3<br />
L ′ ii stellt dann den Eigeninduktivitätsbelag der Leitung i dar, während L ′ ij mit i ≠ j den Gegeninduktivitätsbelag<br />
zwischen den Leitungen i und j bezeichnet. Für die Matrix der Kapazitätsbelagskoeffizienten<br />
gilt in Verallgemeinerung von Gl. (10):<br />
C ′ ii =<br />
n∑<br />
j=0,j≠i<br />
c ′<br />
ij ; C ′ ij = −c ′<br />
ij , i ≠ j (13)<br />
wobei c ′<br />
ij den Kapazitätsbelag zwischen den Leitern i und j angibt.<br />
Wenn man Gl. (6) nach z ableitet und dann in Gl. (7) einsetzt, erhält man die eigentliche Wellengleichung<br />
d 2 (U)<br />
dz 2 = (A)(U) (14)<br />
ähnlich zur Wellengleichung der Zweidrahtleitung. Die (im allgemeinen nicht symmetrische) Matrix<br />
(A) ergibt sich als<br />
(A) = −ω 2 (L ′ )(C ′ ) (15)<br />
Gleichung (14) entspricht der Darstellung von n miteinander gekoppelten linearen Differentialgleichungen<br />
zweiter Ordnung.<br />
Die Lösung von Gl. (14) ergibt sich am einfachsten nach Bestimmung der Eigenwerte und zugehörigen<br />
Eigenvektoren. Diese Eigenwerte lassen sich auch als die neuen Eigenwellen des gesamten verkoppelten<br />
Mehrleitersystems interpretieren, wobei ein System mit n verkoppelten Leitungen zu genau n<br />
Eigenwellen führt.<br />
Wenn die Eigenwelle j(j = 1 . . . n) des Gesamtsystems durch die skalare Wellenamplitude w j beschrieben<br />
wird, so soll γ j<br />
deren Ausbreitungskonstante darstellen, so dass<br />
w j (z) = w jh (0) exp(−γ j<br />
z) + w jr (0) exp(+γ j<br />
z) (16)<br />
in eine hin- und rücklaufende Welle zerlegt werden kann. Es gilt damit auch<br />
d 2 w j<br />
dz 2 = γ2 j w j. (17)<br />
Sind die Wellenamplituden w j bekannt, ergeben sich die Spannungen als lineare Überlagerung dieser<br />
Wellenamplituden w j gemäß<br />
U i =<br />
n∑<br />
V ij w j , (18)<br />
j=1<br />
wobei die Wichtungskoeffizienten V ij noch zu bestimmen sind. In vektorieller Form ergibt Gl. (18):<br />
(U) = (V )(w), (19)<br />
wobei die quadratische Matrix (V ) aus den Elementen V ij besteht und (w) einen Spaltenvektor mit<br />
den Wellenamplituden w 1 . . . w n darstellt.<br />
Zur Bestimmung der Matrix (V ) und der Eigenwerte γ j<br />
sei angenommen, es breite sich nur die j-te<br />
Eigenwelle des Gesamtsystems mit der Wellenamplitude w j aus. Der Spannungsvektor (U) ist dann<br />
gegeben als<br />
(U) = w j (V j ), (20)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/4<br />
wobei der Spaltenvektor (V j ) die j-te Spalte der Matrix (V ) mit den Komponenten V 1j bis V nj darstellt.<br />
Wird Gl. (20) unter Berücksichtigung von Gl. (17) in Gl. (14) eingesetzt, ergibt sich<br />
d 2 (U)<br />
dz 2<br />
= (V j ) d 2 w j<br />
dz 2 = w jγ 2 j (V j) = (A)(U) = w j (A)(V j ). (21)<br />
Gl. (21) stellt ein homogenes lineares Gleichungssystem für (V j ) dar, das auch geschrieben werden<br />
kann als<br />
((A) − γ 2 j (E))(V j) = 0 (22)<br />
mit der Einheitsmatrix (E), das nichttriviale Lösungen nur ergibt, wenn die Koeffizientendeterminante<br />
verschwindet:<br />
)<br />
Det<br />
((A) − γ 2 j (E) = 0, (23)<br />
woraus die Eigenwerte γ j<br />
und schließlich die Eigenvektoren (V j ) bzw. die Matrix (V ) bestimmt werden<br />
können.<br />
Da dann gemäß Gl. (16) w j (z) bekannt ist, ergibt sich gemäß Gl. (18) U i (z) und schließlich mit<br />
Gl. (6) auch der Stromverlauf. Damit sind die Grundgleichungen für den allgemeinen Fall verkoppelter<br />
Mehrleitersysteme bekannt.<br />
3 Symmetrisches 3-Leiter-System<br />
Abb. 2: a) Schematische Darstellung eines symmetrischen 3-Leiter-Systems, b) Realisierung in Form<br />
einer Mikrostreifenleitung.<br />
Bei einem symmetrischen 3-Leiter-System gemäß Abb. 2 gelten für die Bezeichnungen in Abb. 1:<br />
c ′ 10 = c ′ 20 = c ′ ; L ′ 11 = L ′ 22 = L ′ (24)<br />
In diesem Fall vereinfacht sich die Analyse erheblich. Für die beiden Systemwellen ergeben sich dann<br />
die Gleichtaktwelle (auch gerade oder symmetrische Welle) sowie die Gegentaktwelle (auch ungerade<br />
oder anti-symmetrische Welle). Die Gleichtaktwelle werde durch die Spannung U S und den Strom I S<br />
charakterisiert, wobei bei alleiniger Ausbreitung der Gleichtaktwelle I 1 = I 2 = I S und U 1 = U 2 = U S<br />
gilt. Bei alleiniger Ausbreitung der Gegentaktwelle (charakterisiert durch U G und den Strom I G ) gilt<br />
hingegen I 1 = −I 2 = I G sowie U 1 = −U 2 = U G .<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/5<br />
Bei der Überlagerung von Gleich- und Gegentaktwelle gilt somit:<br />
U 1 = U S + U G , U 2 = U S − U G (25)<br />
I 1 = I S + I G , I 2 = I S − I G (26)<br />
beziehungsweise<br />
U S = 1 2 (U 1 + U 2 ), I S = 1 2 (I 1 + I 2 ) (27)<br />
U G = 1 2 (U 1 − U 2 ), I G = 1 2 (I 1 − I 2 ) (28)<br />
Beispielhafte Feldbilder für die Gleichtakt- bzw. Gegentaktstelle sind in Abb. 3 dargestellt.<br />
Abb. 3: Feldbilder der Gleichtaktwelle (a) und der Gegentaktwelle (b) eines symmetrischen 3-Leiter-<br />
Systems, — elektrisches Feld , - - - magnetisches Feld.<br />
Wenn man von Gl. (24) und damit auch von C ′ 11 = C′ 22 = c′ + c ′ 12 = C′ Gebrauch macht, erhält man<br />
durch Addition von jeweils Gl. (1), (2) und Gl. (3),(4):<br />
dU S<br />
dz<br />
dI S<br />
dz<br />
Nach Subtraktion von jeweils Gl. (1), (2) und Gl. (3),(4) ergibt sich:<br />
dU G<br />
dz<br />
dI G<br />
dz<br />
= −I S (z)jω(L ′ + L ′ 12) (29)<br />
= −U S (z)jω(C ′ − c ′ 12) (30)<br />
= −I G (z)jω(L ′ − L ′ 12) (31)<br />
= −U G (z)jω(C ′ + c ′ 12) (32)<br />
Damit sind Gleichtakt- und Gegentaktwelle voneinander entkoppelt und können sich in dem 3-Leiter-<br />
System unabhängig voneinander ausbreiten. Sie werden wie bei der 2-Draht-Leitung durch ihren jeweiligen<br />
Wellenwiderstand und ihre Ausbreitungskonstante beschrieben. Für die Gleichtaktwelle erhält<br />
man aus Gl. (29), (30) für den Wellenwiderstand<br />
Z S =<br />
√<br />
L ′ + L ′ 12<br />
C ′ − c ′ 12<br />
(33)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/6<br />
und die Ausbreitungskonstante γ S<br />
= jβ S<br />
√<br />
β S = ω (L ′ + L ′ 12 )(C′ − c 12 ′ ) (34)<br />
Für die Gegentaktwelle ergibt sich aus Gl. (31),(32) der Wellenwiderstand<br />
Z G =<br />
√<br />
L ′ − L ′ 12<br />
C ′ + c ′ 12<br />
(35)<br />
und die Ausbreitungskonstante γ G<br />
= jβ G<br />
√<br />
β G = ω (L ′ − L ′ 12 )(C′ + c 12 ′ ) (36)<br />
Beispiel: Auf der Leitung breiten sich nur hinlaufende Wellen aus. Am Anfang der Leitung sei<br />
U 1 (z = 0) = U 10 , U 2 (z = 0) = 0 (37)<br />
Damit gilt:<br />
und es ergibt sich mit<br />
U S (z = 0) = U G (z = 0) = U 10<br />
2<br />
(38)<br />
und den Abkürzungen ∆β = β S − β G , ¯β = 1 2 (β S + β G )<br />
U S (z) = U S (z = 0) exp(−jβ S z) (39)<br />
U G (z) = U G (z = 0) exp(−jβ G z) (40)<br />
( )<br />
∆β<br />
U 1 (z) = U S (z) + U G (z) = U 10 cos<br />
2 z exp(−j ¯βz) (41)<br />
( )<br />
∆β<br />
U 2 (z) = U S (z) − U G (z) = −jU 10 sin<br />
2 z exp(−j ¯βz) (42)<br />
Für ∆β ≠ 0 pendelt damit die Spannung zwischen den Leitungen 1 und 2 hin und her und man spricht<br />
von einer Vorwärtskopplung.<br />
Wegen der unterschiedlichen Wellenwiderstände Z S und Z G kommt es zu Reflexionen am Anfang<br />
und Ende des 3-Leiter-Systems, so dass auch eine Rückwärtskopplung auftritt. Tatsächlich gilt bei<br />
homogenem Dielektrikum (TEM-Wellen) ∆β = 0, so dass dort keine Vorwärtskopplung und nur eine<br />
Rückwärtskopplung auftritt. Bei Mikro-Streifenleitungen (Abb. 2b) hingegen wird durchaus ∆β ≠ 0,<br />
∆β ist aber immer noch klein, so dass bei normalen Richtkopplerlängen die Vorwärtskopplung klein ist<br />
und die Rückwärtskopplung auch dort dominiert.<br />
4 Mehrleitersystem mit homogenem Dielektrikum<br />
Falls die einzelnen Leiter in einem homogenen Medium eingebettet sind, sind alle Wellen des Gesamtsystems<br />
TEM-Wellen (wie bei der Zweidrahtleitung) und breiten sich mit einer gemeinsamen<br />
Ausbreitungskonstante γ = jβ mit<br />
β = ω √ µɛ (43)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/7<br />
aus. Die Wellengleichung (14) vereinfacht sich dann erheblich zu<br />
so dass dann die Ausbreitungsmatrix (A) einfach gegeben ist als<br />
mit der Einheitsmatrix (E).<br />
d 2 (U)<br />
dz 2 = γ 2 (U) = −β 2 (U), (44)<br />
(A) = −ω 2 (L ′ )(C ′ ) = −β 2 (E) (45)<br />
Die Lösung von Gl. (44) ist in einfacher Weise mit hin- und rücklaufenden Wellen möglich als<br />
( U(z)<br />
) =<br />
(<br />
Uh (z = 0) ) exp(−jβz) + ( U r (z = 0) ) exp(+jβz), (46)<br />
wobei (U h ) bzw. (U r ) die Spannungsvektoren der hin- bzw. rücklaufenden Wellen bezeichnen. Auch<br />
der Stromvektor (I(z)) lässt sich dann in einfacher Weise in hin- und rücklaufende Wellen zerlegen,<br />
wobei aus Gl. (46) mit Gl. (7) folgt:<br />
( ) ω [ (Uh<br />
I(z) =<br />
β (C′ ) (z = 0) ) exp(−jβz) − ( U r (z = 0) ) exp(+jβz)]<br />
Ähnlich wie am Anfang vom Abschnitt SMI lassen sich dann auch die Spannungen und Ströme am Ende<br />
des Mehrleitersystems (Spannungsvektor (U e ), Stromvektor (I e )) mit den Spannungen und Strömen<br />
am Anfang (Spannungsvektor (U a ), Stromvektor (I a )) verknüpfen. Wenn man in Gl.(SMI 7,8) nur<br />
γ = jβ setzt, die Phasengeschwindigkeit v = ω/β entführt, Z L durch v(L ′ ) und 1/Z L durch v(C ′ )<br />
ersetzt, ergibt sich für das Mehrleitersystem:<br />
(47)<br />
(U a ) = cos(βL)(U e ) + jv sin(βL)(L ′ )(I e ) (48)<br />
(I a ) = jv sin(βL)(C ′ )(U e ) + cos(βL)(I e ) (49)<br />
Mit Gl. (48), (49) ist auch eine allgemeine Impedanztransformation für Mehrleitersysteme mit homogenem<br />
Dielektrikum möglich. Wenn der Abschluss des Mehrleitersystems durch eine Impedanzmatrix<br />
(Z e ) mit (U e ) = (Z e )(I e ) gegeben ist, so lässt sich mit Gl. (48), (49) die Eingangsimpedanzmatrix<br />
(Z a ) mit (U a ) = (Z a )(I a ) bestimmen. Damit stellen Gl. (48), (49) eine vollständige Basis zur Beschreibung<br />
von beliebigen Mehrleitersystemen mit homogenem Dielektrikum dar. Die Verknüpfung in<br />
Gl. (48), (49) zwischen (U e ), (I e ) und (U a ), (I a ) entspricht dabei einer Kettenmatrix. Entsprechend<br />
den Verfahren der linearen Netzwerktheorie ist diese Kettenmatrix in jede andere Matrixdarstellung<br />
(z.B. Leitwert, Widerstands- oder auch Streumatrix) überführbar. Zur numerischen Berechnung ist<br />
dies auf einem Rechner leicht implementierbar.<br />
5 Symmetrisches 3-Leiter System mit homogenem Dielektrikum<br />
(Richtkoppler)<br />
Für ein symmetrisches 3-Leiter System mit homogenem Dielektrikum lässt sich die Analyse weiter<br />
vereinfachen. Dazu soll die Struktur mit den verkoppelten Leitungen 1,2 gemäß Abb. 4 betrachtet und<br />
schließlich für die Anwendung als Richtkoppler (siehe auch Abschnitt HS) analysiert werden.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/8<br />
Abb. 4: Zwei verkoppelte Leitungen als Richtkoppler.<br />
Aufgrund des angenommenen homogenen Dielektrikums sind die Phasenkonstanten β S und β G der<br />
Gleichtakt- und Gegentaktwelle gleich, so dass mit Gl. (45) gilt:<br />
Aus Gl. (34), (36) folgt dann<br />
β S = β G = β = ω √ µɛ (50)<br />
κ L = L′ 12<br />
L ′ = c′ 12<br />
C ′ , (51)<br />
wobei mit κ L ein Koppelkoeffizient eingeführt wird. Gemäß Gl. (51) sind dabei für homogenes Dielektrikum<br />
(TEM-Koppler) die induktive und die kapazitive Kopplung gleich.<br />
Für die Wellenwiderstände der Gleich- und Gegentaktwelle lässt sich dann auch schreiben<br />
mit<br />
Z S = Z L<br />
√<br />
1 + κL<br />
1 − κ L<br />
; Z G = Z L<br />
√<br />
1 − κL<br />
1 + κ L<br />
(52)<br />
Z L =<br />
√<br />
L ′<br />
C ′ = √ Z S Z G (53)<br />
Die Spannungen an den Toren 1-4 des Kopplers in Abb. 4 werden mit einem hochgestellten Index<br />
bezeichnet, um sie von den Spannungen U 1 (z), U 2 (z) entlang den Leitungen 1,2 unterscheiden zu<br />
können.<br />
Am Ende des 3-Leiter-Systems (z = L) werden die Leitungen in Abb. 4 jeweils mit dem Widerstand<br />
Z L abgeschlossen, d.h. es soll gelten<br />
U (3)<br />
I (3) = U 1(z = L)<br />
I 1 (z = L) = Z L = U 2(z = L)<br />
I 2 (z = L) = U(2)<br />
I (2) (54)<br />
Aufgrund des symmetrischen Abschlusses werden die Gleich- und Gegentaktwellen jeweils nur im gleichen<br />
Wellentyp reflektiert und es ergeben sich die Abschlusswiderstände<br />
U S (z = L)<br />
I S (z = L)<br />
U G (z = L)<br />
I G (z = L)<br />
= U 1(z = L) + U 2 (z = L)<br />
I 1 (z = L) + I 2 (z = L) = Z L (55)<br />
= U 1(z = L) − U 2 (z = L)<br />
I 1 (z = L) − I 2 (z = L) = Z L (56)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/9<br />
Da sich die Gleich- und Gegentaktwellen unabhängig voneinander ausbreiten, lassen sich die Impedanzen<br />
Z L vom Ende zum Anfang transformieren wie bei der verlustfreien Zweidrahtleitung (vergl. Gl.<br />
SMI 10), so dass sich unter Berücksichtigung der jeweiligen Wellenwiderstände Z S , Z G für Gleichtaktund<br />
Gegentaktwelle am Eingang als transformierte Impedanzen ergeben:<br />
U S (z = 0)<br />
I S (z = 0) = Z Lz S ;<br />
U G (z = 0)<br />
I G (z = 0) = Z Lz G (57)<br />
mit den normierten Impedanzen z S , z G ,<br />
z S =<br />
√ √<br />
1 + κL<br />
· 1 + j 1+κL<br />
1−κ L<br />
tan(βL)<br />
√<br />
1 − κ L 1+κL<br />
1−κ L<br />
+ j tan(βL)<br />
(58)<br />
z G = 1<br />
z S<br />
(59)<br />
Insbesondere Gl. (59) wird natürlich nur dann so einfach, wenn die Abschlusswiderstände Z L Gl. (53)<br />
entsprechen.<br />
Ziel ist nun die Bestimmung des Eingangswiderstandes U 1 (z = 0)/I 1 (z = 0) und damit das Eigenreflexionsfaktors<br />
des Richtkopplers. Außerderm ist auch die Überkopplung U (4) /U (1) = U 2 (z = 0)/U 1 (z =<br />
0) von Interesse.<br />
Zunächst gilt am Tor 4 (bei Abschluss mit Z L ):<br />
−Z L = U 2(z = 0)<br />
I 2 (z = 0) = U S(z = 0) − U G (z = 0)<br />
I S (z = 0) − I G (z = 0) = Z U S (z = 0) − U G (z = 0)<br />
L 1<br />
z<br />
U<br />
S<br />
S (z = 0) − z S U G (z = 0)<br />
(60)<br />
woraus folgt:<br />
Für den Eingangswiderstand gilt dann:<br />
U S (z = 0)<br />
U G (z = 0) = z S (61)<br />
U 1 (z = 0)<br />
I 1 (z = 0)<br />
= U S(z = 0) + U G (z = 0)<br />
I S (z = 0) + I G (z = 0) = Z U S (z = 0) + U G (z = 0)<br />
L 1<br />
z<br />
U<br />
S<br />
S (z = 0) + z S U G (z = 0)<br />
= Z L<br />
U G (z = 0)(z S + 1)<br />
U G (z = 0)(1 + z S ) = Z L (62)<br />
Damit ist der Eingang reflexionsfrei angepasst und es gilt für den Streuparameter S 11 = 0 und wegen<br />
der Symmetrie des Kopplers in Abb. 4 auch S 22 = S 33 = S 44 = 0, wenn nur die Anschlussleitungen<br />
den Wellenwiderstand Z L aufweisen.<br />
Für die Überkopplung U 2 (z = 0)/U 1 (z = 0) ergibt sich<br />
U 2 (z = 0)<br />
U 1 (z = 0) = U S(z = 0) − U G (z = 0)<br />
U S (z = 0) + U G (z = 0) = z S − 1<br />
z S + 1 = S 41 (63)<br />
Wegen der Eigenreflexionsfreiheit entspricht das Verhältnis U 2 (z = 0)/U 1 (z = 0) = U (4) /U (1) dem<br />
Streuparameter S 41 , wobei wegen der Reziprozität und der Bausymmetrie auch S 41 = S 14 = S 32 =<br />
S 23 gilt.<br />
Damit ist das Nahnebensprechen bestimmt. Bei TEM-Leitungen soll das Fernnebensprechen (Vorwärtskopplung,<br />
Kopplung zwischen den Toren 1,2 bzw. 3,4) verschwinden, was durch Transformation<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/10<br />
vom Eingang (z = 0) zum Ausgang (z = L) in Analogie zu Gl. (8) im Abschnitt SMI (γ = jβ, L<br />
durch −L und Z L durch den jeweiligen Wellenwiderstand der Gleich- bzw. Gegentaktwelle ersetzen)<br />
gezeigt werden kann:<br />
U S (z = L) = cos(βL)U S (z = 0) − jZ S sin(βL)I S (z = 0) (64)<br />
U G (z = L) = cos(βL)U G (z = 0) − jZ G sin(βL)I G (z = 0) (65)<br />
Nach Einsetzen von Gl. (52), (57)-(59), (62) ergibt sich tatsächlich<br />
U (2)<br />
U (1) = U 2(z = L)<br />
U 1 (z = 0) = U S(z = L) − U G (z = L)<br />
U S (z = 0) + U G (z = 0) = 0 (66)<br />
und damit S 21 = 0 und wegen der Reziprozität und Symmetrie auch S 12 = S 34 = S 43 = 0 (Bei Mikro-<br />
Streifenleitungen mit ∆β ≠ 0 ergibt sich auch S 21 ≠ 0, was damit die Richtwirkung verschlechtert).<br />
Für die Übertragung von Tor 1 nach Tor 3 erhält man aus Gl. (64), (65) mit<br />
U (3) = U 1 (z = L) = U S (z = L) + U G (z = L) (67)<br />
und<br />
U (1) = U 1 (z = 0) = U S (z = 0) + U G (z = 0) = U S (z = 0)(1 + 1/z S ) (68)<br />
schließlich<br />
U (3)<br />
U (1) = 1<br />
√<br />
cos(βL) + j sin(βL)/ 1 − κ 2 L<br />
= S 31 (69)<br />
mit<br />
Der Streuparameter S 41 mit<br />
S 31 = S 13 = S 24 = S 42 (70)<br />
S 41 = S 14 = S 23 = S 32 (71)<br />
lässt sich mit Gl. (63), (58) auch schreiben als<br />
S 41 =<br />
jκ L sin(βL)<br />
√1 − κ 2 L cos(βL) + j sin(βL) (72)<br />
in Übereinstimmung mit Gl. (HS 15). Alle anderen Streuparameter als die in Gl. (70), (71) genannten<br />
verschwinden, so dass sich ein idealer Richtkoppler ergibt. Die sich mit Gl. (69), (72) ergebende<br />
Streumatrix ist auch unitär, wie gemäß Abschnitt HS leicht nachgewiesen werden kann.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mehrleitersysteme ML/11<br />
6 Erhöhung der Bandbreite von Leitungsrichtkopplern<br />
Die maximale Überkopplung S 41 in einen Richtkoppler gemäß Abb. 4 erfolgt gemäß Gl. (72) für βL =<br />
π/2 bzw. L = λ/4. Damit ist die Kopplung in hohem Gerade frequenzabhängig. Die Bandbreite kann<br />
erhöht werden für einen ortsabhängigen Koppelkoeffizienten κ L (z). Ein einfaches Beispiel ist in Abb. 5<br />
dargestellt (siehe Meinke/Gundlach, Taschenbuch der Hochfrequenztechnik). Der dort dargestellte<br />
Richtkoppler entspricht der Hintereinander-Schaltung eines 3 dB- und eines 10 dB-Richtkopplers mit<br />
den jeweiligen Längen l 2 = l 1 = λ/4 bei der Bezugsfrequenz f = f 0 . Durch die Überlagerung entsteht<br />
insgesamt ein breitbandiger 5 dB-Richtkoppler.<br />
Abb. 5: Richtkoppler mit 2 Koppelabschnitten. 1) 3 dB-Koppler (Länge l 2 ) allein; 2) 10 dB-Koppler<br />
(Länge l 1 ) allein; 3) Hintereinander-Schaltung beider Koppler.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/1<br />
1 Einleitung<br />
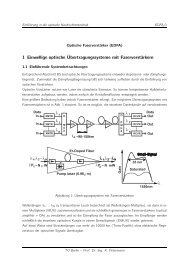
Bei Filtern handelt es sich um lineare (und zeitinvariante) Netzwerke, mit denen bestimmte Frequenzbereiche<br />
eines Eingangssignals herausgeltert werden. Man unterscheidet so beispielsweise zwischen<br />
Tiefpässen (Transmission nur bei tiefen Frequenzen), Hochpässen (Transmission nur bei hohen Frequenzen),<br />
Bandpässen (Transmission nur in einem vorgegebenen Frequenzbereich) und Bandsperren<br />
(Transmission nur ausserhalb eines vorgegebenen Frequenzbereichs).<br />
Das Filternetzwerk sei verlustfrei und reziprok. Die Quelle habe einen reellen Innenwiderstand R 1 und<br />
wir betrachten eine ebenfalls reelle Last R 2 gemäÿ Abb. 1.<br />
Abb. 1: Anordnung eines verlustlosen Filters.<br />
Die Betriebsdämpfungsfunktion H(s) in Abhängigkeit der komplexen Frequenz s (s = j! für reelle<br />
Frequenzen !) ergibt sich als<br />
√<br />
U 2<br />
= 1 R 2<br />
: (1)<br />
U 1 H(s) 4R 1<br />
jH(j!)j 2 charakterisiert dabei die Leistungsübertragung<br />
jH(j!)j 2 =<br />
verfügbare Leistung der Quelle<br />
abgegebene Leistung an der Last = jU 1j 2 =(8R 1 )<br />
> 1: (2)<br />
jU 2 j 2 =(2R 2 )<br />
Die Dämpfung des Filters wird normalerweise in dB angegeben mit dem Betriebsdämpfungsmaÿ<br />
a b (!) = 20 ¡ lgjH(j!)jdB: (3)<br />
Das Filternetzwerk in Abb. 1 lässt sich auch mit Streuparametern beschreiben, was besonders einfach<br />
wird, wenn man den Eingang (Tor 1) auf eine Leitung mit dem Wellenwiderstand R 1 und den Ausgang<br />
(Tor 2) auf eine Leitung mit dem Wellenwiderstand R 2 bezieht. Der Ausgang ist dann angepasst, so<br />
dass sich dort nur eine hinauslaufende Wellenamplitude b 2 ergibt, während am Eingang das Signal<br />
durchaus reektiert werden kann, so dass sowohl I 1 als auch U 10 hin- und rücklaufende Strom- bzw.<br />
Spannungskomponenten beinhalten:<br />
U 10 = U h1 + U r 1 (4)<br />
I 1 = I h1 + I r 1 = 1 R 1<br />
(U h1 U r 1 ) (5)<br />
Somit gilt:<br />
U 1 = R 1 ¡ I 1 + U 10 = 2U h1 (6)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/2<br />
Der Streuparameter S 21 ergibt sich somit<br />
S 21 = b 2<br />
= U 2= p √<br />
R 2<br />
a 1 U h1 = p = U 2 4R 1<br />
= 1<br />
R 1 U 1 R 2 H(j!)<br />
und wegen der Reziprozität auch S 12 = S 21 = 1=H(j!).<br />
Unter Ausnutzung der Verlustfreiheit des Netzwerkes (Unitarität der Streumatrix) gilt für den Eigenreexionskoezienten<br />
= jS 11 j = jS 22 j =<br />
√<br />
1 jS 21 j 2 =<br />
(7)<br />
√<br />
1<br />
jH(j!)j<br />
jH(j!)j<br />
2 1 (8)<br />
Es ist häug auch die Gruppenlaufzeit g durch ein Filter von Interesse. Sie ist mit<br />
H(j!) = jH(j!)j exp ( j'(!) ) (9)<br />
durch<br />
gegeben.<br />
g = d'(!)<br />
d!<br />
(10)<br />
2 Realisierung von LC-Tiefpässen<br />
Die Übertragungsfunktion 1=H(s) lässt sich als Quotient eines Zähler- und eines Nennerpolynoms<br />
schreiben, die durch ihre jeweiligen Nullstellen in der komplexen s-Ebene charakterisiert werden (siehe<br />
auch Vorlesung Signale und Systeme).<br />
Für einige Tiefpasslter (z.B. Potenz- bzw. Butterworth, Tschebysche- oder Bessel-Thomson-Tiefpässe)<br />
wird die Übertragungsfunktion nur durch ein Nennerpolynom beschrieben, so dass sich dann<br />
die Betriebsdämpfungsfunktion H(s) schreiben lässt als<br />
H(s) = C<br />
N∏<br />
n=1<br />
(s s xn ); (11)<br />
wobei N die Ordnung des Polynoms und damit des Filters angibt. C ist eine Konstante. Die Nullstellen<br />
s xn von H(s) (die Polstellen der Übertragungsfunktion 1=H(s)) liegen dabei in der linken s-Halbebene<br />
(d.h. Re(s xn ) < 0) und sind entweder rein reell oder paarweise konjugiert komplex (siehe Vorlesung<br />
Signale, Netzwerke und Systeme). Mögliche Realisierungen eines LC-Tiefpasslters mit H(s) gemäÿ<br />
Gl.(11) zeigt Abb. 2, wobei N die Anzahl der benötigten Reaktanzen angibt. Die Tore 1 und 2 wären<br />
wie in Abb. 1 mit der Signalquelle bzw. der Last zu verbinden.<br />
Oensichtlich wirken die Schaltungen in Abb. 2 als Tiefpässe, denn mit zunehmender Frequenz nimmt<br />
sowohl der Blindwiderstand der Serieninduktivitäten als auch der Blindleitwert der Querkapazitäten<br />
zu. Die genaue Wahl der Kapazitäten bzw. Induktivitäten hängt von den gewünschten Polstellen s xn<br />
in Gl.(11) ab.<br />
In Abb. 3 sind die Dämpfungsverläufe verschiedener Tiefpässe der Ordnung N = 5 dargestellt, wobei<br />
der Potenztiefpass (auch bezeichnet als Butterworth-Tiefpass) und der Tschebysche-Tiefpass durch<br />
Gl.(11) dargestellt und gemäÿ Abb. 2 realisiert werden. Für diese Tiefpässe gilt bei hohen Frequenzen<br />
(jsj js xn j) nach Gl.(11):<br />
jH(j!)j ! N ; (12)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/3<br />
Abb. 2: Mögliche Tiefpässe verschiedener Ordnung N.<br />
Abb. 3: Betriebsdämpfung verschiedener Filter der Ordnung N = 5.<br />
was einem Dämpfungsanstieg bei hohen Frequenzen von N ¡ 6dB=Oktave entspricht.<br />
Für die Tiefpass-Realisierung sind verschiedene Optimierungsstrategien möglich. Beim Potenz- bzw.<br />
Butterworth-Tiefpass wird die Forderung nach maximal achem Dämpfungsverlauf gestellt, der durch<br />
jH(j!)j 2 = 1 +<br />
(<br />
!<br />
! G<br />
) 2N<br />
(13)<br />
gegeben ist (! G - 3 dB Grenzfrequenz) und sich dadurch auszeichnet, dass<br />
d n ( ) ∣ jH(j!)j 2 ∣∣!=0<br />
= 0 für n < 2N (14)<br />
d! n<br />
und damit alle Ableitungen bis zur Ordnung (2N 1) bei ! = 0 verschwinden. Der Dämpfungsverlauf<br />
des Potenzlters in Abb. 3 entspricht genau Gl.(13) mit N = 5.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/4<br />
Die zur Realisierung des Potenzlters gemäÿ Gl.(13) sich ergebenden Pole s xn (Nullstellen von H(s)<br />
in Gl.(11)) liegen in der komplexen s-Ebene auf einem Halbkreis mit dem Radius ! G gemäÿ (siehe<br />
Signale und Systeme)<br />
s xn = ! G exp<br />
(<br />
j N + 2n 1<br />
2N<br />
)<br />
; n = 1; 2; : : : ; N: (15)<br />
Die in Abb. 3 eingeführte Durchlaÿgrenzfrequenz ! D bezeichnet die Frequenz, unterhalb derer die<br />
Dämpfung einen vorgegebenen Wert, in Abb. 3 0,1773 dB (entspricht mit Gl.(3), (7) einem = 0; 2)<br />
nicht überschreitet. Eine Realisierung als Tschebysche-Tiefpass (dort ist jH(j!)j 2 = 1+¡T 2 (!=! N D),<br />
- Konstante, T N (x) - Tschebysche-Polynom der Ordnung N) lässt im Durchlaÿbereich eine Oszillation<br />
der Betriebsdämpfung im vorgegebenen Toleranzbereich zu, wodurch ein steilerer Übergang zum<br />
Sperrbereich erzielt wird. Ein noch steilerer Übergang vom Durchlaÿ- zum Sperrbereich wird erzielt,<br />
wenn die Betriebsdämpfungsfunktion H(s) zusätzlich zu den Nullstellen s xn noch Pole (Nullstellen<br />
der Übertragungsfunktion 1=H(s)) enthält. Man gelangt dann beispielsweise zum Cauer-Tiefpass. Die<br />
Pole im Dämpfungsverlauf entstehen, wenn in Abb. 2 Induktivitäten durch Parallelschwingkreise oder<br />
Kapazitäten durch Serienschwingkreise ersetzt werden.<br />
Für eine Tiefpass-Anordnung nach Abb. 2 (oder ähnlich) lässt sich die Betriebsdämpfung berechnen,<br />
wobei die Kapazitäten und Induktivitäten so gewählt werden müssen, dass die gewünschten Pole und<br />
Nullstellen entstehen. Ergebnisse derartiger Rechnungen sind in Filterhandbüchern enthalten, wobei<br />
beispielsweise die Realisierung eines Filters 5. Ordnung mit einer maximalen Dämpfung von 0,1773 dB<br />
im Durchlaÿbereich ( = 0; 2) Abb. 4 entnommen werden kann (aus R. Saal, Handbuch zum Filterentwurf,<br />
AEG-Telefunken, 1979).<br />
Abb. 4 zeigt die Tiefpassrealisierung in normierter Darstellung. ist die normierte Frequenz<br />
= ! ! B<br />
(16)<br />
mit der Bezugsfrequenz ! B , wobei hier ! B = ! D mit der Dämpfungsgrenzfrequenz ! D gilt. Entsprechend<br />
gilt für die normierte komplexe Frequenz p = s=! B , und damit sind die Nullstellen s xn von H(s)<br />
(Polstellen der Übertragungsfunktion) durch s x = ! B ( ¦ j ) gegeben.<br />
Die Bauelemente-Dimensionierung bezieht sich auf gleiche Widerstände am Ein- und Ausgang R 1 =<br />
R 2 (r 1 = r 2 ) bzw. einer Speisung mit idealer Stromquelle (r 1 ! 1 bzw. R 1 ! 1) oder idealer<br />
Spannungsquelle (r 0 1 = 0 bzw. R0 1<br />
= 0). Die Realisierungen A und B entsprechen einander (siehe<br />
auch obere und untere Beschriftungszeile in Abb. 4). Die angegebenen Induktivitäten und Kapazitäten<br />
sind normiert, l = ! B L=R, c = ! B RC mit dem aktuellen Abschlusswiderstand R, so dass sich die<br />
aktuellen Induktivitäten bzw. Kapazitäten ergeben zu<br />
L = l R<br />
! B<br />
; C = c <br />
! B R<br />
(17)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/5<br />
Abb. 4: Realisierung von Tiefpassltern 5. Ordnung als P : Potenz- oder Butterworth-Tiefpass oder<br />
T : Tschebysche-Tiefpass. ¢ = 17 : : : 25: Cauer-Tiefpässe unterschiedlicher Sperrdämpfung.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/6<br />
Beispiel: Ein Tschebysche-Tiefpasslter (N = 5) mit der Grenzfrequenz f D = ! D =2 = 10MHz und<br />
< 0:2 für f < f D sei mit der unten in Abb. 2 dargestellten Schaltung und R 1 = R 2 = 50 zu<br />
dimensionieren.<br />
Aus Abb. 4 folgt:<br />
c 1 = c 5 = 1; 301894 l 2 = l 4 = 1; 345558 c 3 = 2; 128570<br />
und damit<br />
C 1 = C 5 = 414pF L 2 = L 4 = 1; 07H C 3 = 678pF<br />
Man erhält dann den in Abb. 3 dargestellten Dämpfungsverlauf.<br />
3 Realisierung von Hochpass, Bandpass, Bandsperre<br />
Filterhandbücher enthalten im allgemeinen nur die Dimensionierung von Tiefpässen, da sich der Entwurf<br />
von Hochpässen, Bandpässen und Bandsperren auf einen Tiefpass-Entwurf zurückführen lässt.<br />
Abb. 5 illustriert die Transformation eines Referenztiefpasses (Abb. 5a) mit der Bezugsfrequenz ! B<br />
in einen Hochpass (Abb. 5b), Bandpass (Abb. 5c) sowie eine Bandsperre (Abb. 5d).<br />
Tiefpass-Hochpass-Transformation Aus dem Referenz-Tiefpass in Abb. 5a ergibt sich das Hochpassverhalten<br />
in Abb. 5b, wenn die Frequenzen ! < ! B des Tiefpasses in die entsprechenden Frequenzen<br />
~! > ! B des Hochpasses abgebildet werden. Die komplette Abbildungsvorschrift zwischen der<br />
komplexen Frequenz j! des Tiefpasses und der komplexen Frequenz j ~! lautet<br />
j ~!<br />
! B<br />
= ! B<br />
j! bzw: ~p = 1 p<br />
(18)<br />
Damit entspricht das Dämpfungsverhalten des Hochpasses bei der Frequenz ~! = a! B exakt dem<br />
Dämpfungsverhalten des zugrundeliegenden Tiefpasses bei der Frequenz ! = ! B =a. Die zur Realisierung<br />
des Referenztiefpasses erforderlichen Induktivitäten und Kapazitäten seien bekannt. Bei der<br />
Transformation einer Induktivität L 0 des Referenztiefpasses muss mit Gl.(18) für seine Impedanz gelten:<br />
L<br />
Z = j!L 0 = ! 2 0 !<br />
B<br />
= 1<br />
j ~! j ~!C mit C = 1<br />
! 2 L (19)<br />
B 0<br />
so dass eine Induktivität L 0 des Tiefpasses im transformierten Hochpass durch die Kapazität C nach<br />
Gl.(19) ersetzt wird. Für eine Kapazität C 0 des Referenztiefpasses gilt entsprechend<br />
C<br />
Y = j!C 0 = ! 2 0<br />
B<br />
j ~!<br />
!<br />
= 1<br />
j ~!L mit L = 1<br />
! 2 C B 0<br />
(20)<br />
so dass C 0 im transformierten Hochpass durch eine Induktivität L nach Gl.(20) ersetzt wird. Die aus<br />
Abb. 2 transformierten Hochpässe bestehen damit aus Längskapazitäten mit Querinduktivitäten. Die<br />
obigen Zusammenhänge sind in Abb. 6 tabellarisch zusammengefaÿt.<br />
Tiefpass-Bandpass-Bandsperre Transformation Beim transformierten Bandpass soll die Mittenfrequenz<br />
bei der Bezugsfrequenz ! B liegen, so dass die Frequenz ! 0 des Tiefpasses in die Frequenzen<br />
~! ¦! B des Bandpasses transformiert werden muss. Die Transformation erfolgt nicht nur zu<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/7<br />
Abb. 5: Dämpfungsverlauf eines a) Referenztiefpasses und des daraus abgeleiteten b) Hochpasses ,<br />
c) Bandpasses sowie einer d) Bandsperre.<br />
~! +! B , sondern auch zu ~! ! B , da immer jH(j ~!)j = jH( j ~!)j gelten muss. Es wäre deshalb<br />
folgende Transformation wünschenswert:<br />
j! j2a(~! ! B ) für ~! +! B (21)<br />
j! j2a(~! + ! B ) für ~! ! B (22)<br />
wobei der Faktor a das Bandbreitenverhältnis zwischen dem transformierten Bandpass und dem Tiefpass<br />
angibt. Gl.(21),(22) gemeinsam werden relativ gut durch die Transformationsvorschrift<br />
j! = ja (~! ! B)(~! + ! B )<br />
~!<br />
= a(j ~! + ! 2 B<br />
=j ~!) (23)<br />
oder in normierter Form mit p = j!=! B , ~p = j ~!=! B durch<br />
( )<br />
p = a ~p + 1 ~p<br />
(24)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/8<br />
Abb. 6: Transformation eines Referenztiefpasses in Hochpass,Bandpass, Bandsperre.<br />
erfüllt. Ähnlich wie bei der Tiefpass-Hochpass-Transformation können auch bei der Tiefpass-Bandpass-<br />
Transformation die Induktivitäten und Kapazitäten des Referenztiefpasses durch geeignete Reaktanzen<br />
ersetzt werden. Bei der Transformation einer Induktivität L 0 des Referenztiefpasses muss mit Gl.(23)<br />
gelten:<br />
Z = j!L 0 = j ~!aL 0 + a!2 B<br />
j ~! L 0<br />
!<br />
= j ~!L + 1<br />
j ~!C<br />
mit<br />
1<br />
L = aL 0 ; C =<br />
a! 2 L (26)<br />
B 0<br />
so dass eine Induktivität des Tiefpasses im transformierten Bandpass durch einen Serienschwingkreis<br />
ersetzt wird. Entsprechend gilt bei einer Kapazität C 0 des Referenztiefpasses:<br />
(25)<br />
Y = j!C 0 = j ~!aC 0 + a!2 B<br />
j ~! C !<br />
0 = j ~!C + 1<br />
j ~!L<br />
(27)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/9<br />
mit<br />
1<br />
C = aC 0 ; L =<br />
a! 2 C ; (28)<br />
B 0<br />
der damit in einen Parallelschwingkreis transformiert wird.<br />
Die Durchlaÿgrenzfrequenzen des Bandpasses ~! = ! ¦D ergeben sich aus der Durchlaÿgrenzfrequenz<br />
des Tiefpasses ! = ! B mit Gl.(23) zu:<br />
⎛√<br />
⎞<br />
! ¦D = ! B<br />
⎝ 1 + 1<br />
4a ¦ 1 ⎠ (29)<br />
2 2a<br />
so dass sich die gewünschte Durchlaÿbandbreite (! +D ! D) = ! B =a ergibt. Aufgrund der endlichen<br />
Güte Q der verwendeten Bauelemente (Q = !L=R, R parasitärer Reihenwiderstand bei einer<br />
Induktivität bzw. Q = !C=G, G parasitärer Parallelleitwert bei Kapazitäten) sind nicht beliebig kleine<br />
Bandbreiten realisierbar. Praktisch sollte a Q 10 : : : 100 erfüllt sein. Für kleinere Bandbreiten<br />
und damit höhere Güten können Quarze, keramische Filter, SAW(surface acoustic wave)-Filter oder<br />
unter Umständen auch Filter mit Leitungselementen eingesetzt werden.<br />
Bei der Tiefpass-Bandsperre Transformation gelten ähnliche Überlegungen wie beim Bandpass, wobei<br />
der Tiefpass gedanklich erst in einen Hochpass und dieser Hochpass dann gemäÿ obiger Bandpass-<br />
Transformationsbeziehungen transformiert wird.<br />
Die Transformationsbeziehungen sind in Tabelle 6 nochmals zusammengestellt.<br />
Bei der praktischen Filtersynthese wird häug gedanklich zunächst ! B = 1=s und ein Impedanzniveau<br />
von R = 1 zugrundegelegt. Die so normierten Induktivitäten und Kapazitäten werden dann erst zum<br />
Schluss gemäÿ Gl.(17) entnormiert.<br />
4 Positiv-Impedanz-Inverter (PII)<br />
Mit den vorgenannten Überlegungen ist die Synthese einer breiten Klasse von Filtern möglich. Es<br />
können sich aber möglicherweise Bauelementewerte ergeben, die nur schwer realisierbar sind. In diesem<br />
Fall kann es vorteilhaft sein, Impedanzen zu transformieren, beispielsweise mit einem Positiv-Impedanz-<br />
Inverter (PII).<br />
Abb. 7: Positiv-Impedanz-Inverter.<br />
Ein Positiv-Impedanz-Inverter gemäÿ Abb. 7 mit dem Bezugswiderstand R D soll einen Abschlusswiderstand<br />
Z e in einen Eingangswiderstand<br />
Z a = U a<br />
I a<br />
= R2 D<br />
Z e<br />
(30)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/10<br />
transformieren, ihn also invertieren. Die Kettenmatrix des PII ist gegeben als<br />
⎛<br />
⎝ U a<br />
I a<br />
⎞<br />
⎛<br />
⎠ = exp(j')<br />
⎝ 0 R D<br />
1<br />
R D<br />
0<br />
⎞ ⎛<br />
⎠<br />
⎝ U e<br />
I e<br />
⎞<br />
⎠ (31)<br />
wobei sich mit Reaktanzen beispielsweise folgende Realisierungsmöglichkeiten (Abb. 8) ergeben:<br />
Abb. 8: Positiv-Impedanz-Inverter in - oder T-Schaltung<br />
Reaktanzen ¦jR D sind jedoch breitbandig nicht realisierbar. Eine schmalbandige Realisierung um eine<br />
Bezugsfrequenz ! B herum ist jedoch beispielsweise möglich gemäÿ Abb. 9.<br />
Abb. 9: Schmalbandige Positiv-Impedanz-Inverter.<br />
Für die LC-Schaltungen gilt dabei ! B L = R D = (! B C) 1 . Ein schmalbandiger PII kann auch durch<br />
eine =4-Leitung mit dem Wellenwiderstand Z L = R D dargestellt werden.<br />
Mit Hilfe eines PII ist es beispielsweise möglich, eine Kapazität in eine Induktivität oder umgekehrt zu<br />
transformieren. Die schmalbandige Realisierung nach Abb. 9 kann dabei durchaus ausreichend sein,<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/11<br />
solange es sich um die Synthese schmaler Bandlter handelt.<br />
5 Gekoppelte Bandlter<br />
Bandlter werden häug auch als miteinander verkoppelte Schwingkreise realisiert. Unter Berücksichtigung<br />
des Positiv-Impedanz-Inverters ist auch hier ein systematischer Entwurf möglich.<br />
Abb. 10: Tiefpass-Bandpass-Transformation mit gekoppelten Schwingkreisen.<br />
Als Beispiel wird in Abb. 10 die Transformation eines Tiefpasslters der Ordnung N = 3 in einen<br />
Bandpass betrachtet. Zunächst werden beim Tiefpass in Abb. 10a die Induktivität L 0 mit Hilfe von<br />
Positiv-Impedanz-Invertern mit den Bezugswiderständen R D = R in die Kapazitäten<br />
C 0 1 = L0<br />
R 2 (32)<br />
in Abb. 10b umgewandelt. Der Tiefpass von Abb. 10b hat damit die gleichen Eigenschaften wie<br />
der Tiefpass in Abb. 10a. Der Tiefpass von Abb. 10b wird nun mit Hilfe der Tiefpass-Bandpass-<br />
Transformation in einen Bandpass (Mittenfrequenz ! B , Bandbreite ! B =a) umgewandelt (vergl. Tabelle<br />
6), so dass sich in Abb. 10c ergibt<br />
C 1 = aC 0 1 ; L 10 =<br />
1<br />
a! 2 B C0 1<br />
; C 2 = aC 0 2 ; L 20 =<br />
1<br />
a! 2 B C0 2<br />
(33)<br />
und die Positiv-Impedanz-Inverter können schmalbandig nach Abb. 8 mit R D = R = ! B L 0 , d.h. mit<br />
positiven und negativen Induktivitäten<br />
L 0 = R ! B<br />
(34)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/12<br />
realisiert werden.<br />
Durch Zusammenfassung der Induktivitäten ergibt sich dann Abb. 10d, wobei die Induktivität L 20 in<br />
2 parallele Induktivitäten von jeweils 2L 20 aufgeteilt ist und sich damit<br />
L 11 =<br />
( 1<br />
L 10<br />
1<br />
L 0<br />
)<br />
1<br />
und L 22 =<br />
( 1<br />
2L 20<br />
1<br />
L 0<br />
)<br />
1<br />
ergeben. Die beiden -Schaltungen aus Induktivitäten können bei Vergleich mit Gl.(7), (8), Abschnitt<br />
P als Transformatoren dargestellt werden mit<br />
(35)<br />
und M = k p L 1 L 2 mit<br />
beziehungsweise<br />
k =<br />
L 1 = L 11(L 22 + L 0 )<br />
L 11 + L 22 + L 0<br />
(36)<br />
L 2 = L 22(L 11 + L 0 )<br />
L 11 + L 22 + L 0<br />
(37)<br />
M =<br />
L 22 L 11<br />
L 11 + L 22 + L 0<br />
(38)<br />
1<br />
√ (<br />
1 + L 0<br />
L 22<br />
)(1 + L 0<br />
L 11<br />
) : (39)<br />
Alternativ zur induktiven Kopplung in Abb. 10e lässt sich das Filter auch mit kapazitiver Kopplung<br />
entwerfen, wenn die Reaktanzen des Positiv-Impedanz-Inverters in Abb. 7 nicht mit Induktivitäten,<br />
sondern mit Kapazitäten realisiert werden.<br />
Beispiel: Aufbauend auf einen Tschebysche-Tiefpass 3. Ordnung mit maximaler Dämpfung von<br />
0,1773 dB ( < 0:2) im Durchlaÿbereich soll ein Bandpass mit der Mittenfrequenz f B = 10MHz<br />
und einer Bandbreite von 2 MHz (a = 5) für R = 50 entworfen werden.<br />
Nach Filterhandbuch gilt: l 0 = 1; 189469, c 0 2<br />
= 1; 154193<br />
Damit hätte der Referenztiefpass (! D = ! B = 2f B = 2 ¡ 10MHz, R = 50)<br />
L 0 = 947nH ; C 0 2<br />
= 367pF (40)<br />
und für den Bandpass in Abb. 10e ergibt sich mit L 10 = 134nH, L 20 = 138nH, L 0 = 796nH,<br />
L 11 = 161nH und L 22 = 422nH die Dimensionierung:<br />
C 1 = 1; 89nF ; C 2 = 1; 84nF (41)<br />
L 1 = 142nH ; L 2 = 293nH ; k = 0; 241 (42)<br />
6 Allpässe<br />
Allpässe haben eine konstante Dämpfung jH(j!)j = const, so dass nur die Phase ' von ! abhängt,<br />
was zu einer frequenzabhängigen Gruppenlaufzeit gemäÿ Gl.(10) führt. Allpässe werden eingesetzt,<br />
um Laufzeitverzerrungen auszugleichen. Nähere Informationen ndet man beispielsweise in<br />
Meinke/Gundlach: Taschenbuch der Hochfrequenztechnik, 4. Auage.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/13<br />
7 Filter mit Leitungen<br />
Filter mit quasi-konzentrierten Elementen Die einfachste Möglichkeit zur Realisierung eines Tiefpasslters<br />
gemäÿ Abb. 2 besteht darin, die Kapazitäten und Induktivitäten durch kurze Leitungsstücke<br />
(Länge =4 im interessierenden Frequenzbereich) darzustellen, wobei Induktivitäten durch<br />
Leitungsstücke mit sehr hohem Wellenwiderstand √ L 0 =C 0 ( √ L 0 =C 0 Z L , Z L -Wellenwiderstand<br />
der Zuleitung), und Kapazitäten durch Leitungsstücke mit sehr kleinem Wellenwiderstand √ L 0 =C 0<br />
( √ L 0 =C 0 Z L ) realisiert werden.<br />
Abb. 11: Schematische Realisierungeines Tiefpasslters 5. Ordnung.<br />
Als Beispiel ist in Abb. 11 ein Tiefpasslter der Ordnung N = 5 in Anlehnung an Abb. 2, unten,<br />
skizziert. Die Kapazitäten C i und Induktivitäten L i ergeben sich mit den jeweiligen Leitungsbelägen<br />
C 0 i , L0 i<br />
und den jeweiligen Leitungslängen l i näherungsweise zu C i C 0 i<br />
¡ l i , L i L 0 i ¡ l i.<br />
Auch für Bandlter lassen sich leicht schmalbandige Leitungsrealisierungen angeben. So können für<br />
den Bandpass in Abb. 10c die Positiv-Impedanz-Inverter durch =4-Leitungen (vergl. Abb. 9e) und die<br />
3 Parallelschwingkreise durch am Ende kurzgeschlossene =4-Stichleitungen realisiert werden.<br />
Filter mit Leitungen jeweils gleicher Länge Eine genauere und doch einfache Analyse von Leitungsltern<br />
wie z.B. in Abb. 11 ist dann möglich, wenn alle vorkommenden Leitungsstücke gleich lang<br />
sind.<br />
Wenn man beispielsweise gemäÿ Abschnitt SMI eine am Ende kurzgeschlossene Leitung der Länge l<br />
mit dem Wellenwiderstand Z L betrachtet, gilt für die Eingangsimpedanz<br />
bzw. für eine verlustfreie Leitung mit = j = j!=v<br />
Z a = Z L tanh(l) (43)<br />
Z a = Z L tanh(j!l=v ) (44)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/14<br />
wobei wir die komplexe Frequenz j! = s und l=v = , -Laufzeit der Leitung (Dispersion vernachlässigt),<br />
einführen können und sich so ergibt<br />
wobei S eine transformierte Frequenzebene gemäÿ<br />
Z a = Z L ¡ S (45)<br />
S = tanh(s) (46)<br />
angibt. Gl.(46) wird auch als Richards-Transformation bezeichnet, die sich mit<br />
auch schreiben lässt als<br />
mit<br />
exp(x) exp( x)<br />
tanh(x) =<br />
exp(x) + exp( x)<br />
S = z 1<br />
z + 1<br />
(47)<br />
(48)<br />
z = exp(2s); (49)<br />
wobei Gl.(49) praktisch der z-Transformation entspricht (vergleiche 'Signale und Systeme').<br />
Der Grundgedanke der Filtersynthese besteht nun darin, einen Standardlterentwurf in der S-Ebene<br />
durchzuführen und die dort erhaltenen Elemente dann durch entsprechende Leitungsstücke in der s-<br />
Ebene zu ersetzen. So entspricht die Impedanz einer kurzgeschlossenen Leitung gemäÿ Gl.(45) formal<br />
in der S-Ebene der Impedanz einer Induktivität L = Z L . Damit lässt sich die kurzgeschlossene Leitung<br />
in der S-Ebene formal als Induktivität darstellen (siehe auch Abb. 12). Ähnlich lässt sich die am Ende<br />
leerlaufende Leitung durch eine Eingangsimpedanz<br />
Z a = Z L coth(l) = Z L<br />
S<br />
beschreiben und damit in der S-Ebene durch eine Kapazität C = 1=Z L darstellen.<br />
Ein allgemeines Leitungselement kann mit einer Kettenmatrix (siehe Seite SMI/2) beschrieben werden,<br />
die sich mit der Richards-Transformation schreiben lässt:<br />
⎛<br />
⎝ U a<br />
I a<br />
⎞<br />
⎠ =<br />
1<br />
p<br />
1 S<br />
2<br />
⎛<br />
⎝ 1 SZ L<br />
S<br />
Z L<br />
1<br />
⎞ ⎛<br />
⎠<br />
⎝ U e<br />
I e<br />
⎞<br />
(50)<br />
⎠ (51)<br />
Da sich diese Matrix in der S-Ebene nicht als einfaches Reaktanz-Netzwerk darstellen lässt, wird in der<br />
S-Ebene ein neues Element, das sogenannte Einheitselement (engl. unit element, abgekürzt UE) mit<br />
der charakteristischen Impedanz Z = Z L eingeführt, welches durch die Matrix Gl.(51) repräsentiert<br />
wird. Die korrespondierenden Elemente in der Leitungsebene und der Richards-Ebene sind in Abb. 12<br />
zusammenfassend dargstellt.<br />
Wenn man die komplexen Frequenzen gemäÿ s = + j! und S = u + jv beschreibt, ist der Zusammenhang<br />
zwischen ! (für s = j!) und der transformierten Frequenz v (für S = jv) nach Gl.(46)<br />
durch<br />
v = tan(!) (52)<br />
gegeben. Kleine Frequenzen v 1 in der S-Ebene entsprechen damit den Frequenzen ! 0; =; 2=; : : :,<br />
während groÿe v ! 1 den Frequenzen ! =2; 3=2; 5=2; : : : entsprechen.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/15<br />
Abb. 12: Richards-Transformation von Schaltungselementen.<br />
Zur Illustration zeigt Abb. 13a den Dämpfungsverlauf eines Referenztiefpasses (Tschebysche-Tiefpass<br />
3. Ordnung) in der S-Ebene, woraus sich dann nach Transformation in Abb. 13b ein Leitungslter mit<br />
über ! periodischem Dämpfungsverlauf ergibt. So wird der Tiefpass in Abb. 13a für kleine Frequenzen<br />
! =2 wieder in einen Tiefpass transformiert, für ! =2 in eine Bandsperre, für ! in<br />
einen Bandpass usw.<br />
Ein Realisierungsbeispiel dafür ist in Abb. 15 dargestellt. Für den gewünschten Tschebysche-Tiefpass<br />
werden zunächst die Induktivitäten L 1 , L 3 , C 2 für die gewünschte Dämpfungsgrenzfrequenz v D in der<br />
S-Ebene bestimmt. Wenn man bei der Transformation in die Leitungsebene die Induktivitäten und<br />
Kapazitäten gemäÿ Abb. 12 einfach durch kurzgeschlossene bzw. leerlaufende Leitungsstücke ersetzt,<br />
entsteht das Problem, dass alle Leitungsstücke an der gleichen Stelle angreifen, was oft nur schwer<br />
realisierbar ist.<br />
Es ist deshalb zweckmäÿig, in das Filter Einheitselemente gemäÿ Abb. 15b einzuführen (dies entspricht<br />
Leitungsstücken mit dem Wellenwiderstand Z L = Z = R), die das Übertragungsverhalten des Filters<br />
nicht verändern. Einheitselemente mit angeschlossenen Reaktanzen können dann entsprechend Abb. 14<br />
umgeformt werden (Kuroda-Transformation), so dass sich schlieÿlich die in Abb. 15c dargestellte<br />
Realisierung in der S-Ebene ergibt. In der Leitungsrealisierung (mit der Filterdämpfung nach Abb. 13b)<br />
erhält man dann die Anordnung nach Abb. 15d mit drei leerlaufenden Stichleitungen.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/16<br />
Abb. 13: Entwurf von Leitungsltern mit Richards-Transformation. a) Tiefpassentwurf in der S-Ebene<br />
(Frequenz v) und b) Dämpfungsverhalten des transformierten Filters mit Leitungselementen.<br />
Bei der gemäÿ obigen Überlegungen durchgeführten Filtersynthese ist zu beachten, dass Leitungswellenwiderstände<br />
nur in einem begrenzten Bereich realisierbar sind. Einheitselemente sind aber nicht nur<br />
durch einfache Leitungsstücke realisierbar, sondern auch mit verkoppelten Leitungen (Mehrleitersysteme),<br />
so dass sich mit verkoppelten Leitungen unter Umständen besser realisierbare Filter entwerfen<br />
lassen (siehe Zinke, Brunswig, Band I oder Meinke/Gundlach, Taschenbuch der Hochfrequenztechnik,<br />
4. Auage, Abschnitt F).<br />
Wenn das Filter in Abb. 11 durch Hintereinanderschaltung gleichlanger Leitungsstücke realisiert wird,<br />
lässt sich das in der S-Ebene als die Hintereinanderschaltung von Einheitselementen unterschiedlicher<br />
Impedanz Z i darstellen. Wenn U a , I a Spannung und Strom am Eingang und U e , I e Spannung und<br />
Strom am Ende des Filters bezeichnen, gilt für die Kettenmatrix bei N hintereinander geschalteten<br />
Einheitselementen (vergleiche Gl.(51)):<br />
⎛<br />
⎝ U a<br />
I a<br />
⎞<br />
⎠ =<br />
1<br />
(p<br />
1 S<br />
2<br />
⎛<br />
∏ N<br />
) N<br />
i=1<br />
⎝ 1 SZ i<br />
S<br />
Z i<br />
1<br />
⎞ ⎛<br />
⎠<br />
⎝ U e<br />
I e<br />
⎞<br />
⎠ (53)<br />
woraus sich die Übertragungsfunktion des Filters bestimmen lässt. Die einzelnen Wellenwiderstände<br />
Z i lassen sich dann so wählen, dass die gewünschten Pole und Nullstellen der Übertragungsfunktion<br />
in der S-Ebene entstehen.<br />
Insbesondere bewirkt eine =4-Leitung (dort ist S ! 1) mit dem Wellenwiderstand Z L = p R 1 R 2<br />
eine schmalbandige Impedanztransformation zwischen den Widerständen R 1 , R 2 . Damit stellt ein<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/17<br />
Abb. 14: Kuroda-Transformationen.<br />
Einheitselement für S ! 1 (bzw. v ! 1) einen schmalbandigen Impedanzwandler (genauer Impedanzinverter)<br />
dar. Zur breitbandigen Impedanztransformation um S ! 1 herum ist in der S-Ebene<br />
ein hochpassartiges Übertragungsverhalten erforderlich, das sich durch Analyse von Gl.(53) mit geeignet<br />
monoton gestuften Impedanzen Z i erreichen lässt (Eine genauere Analyse derartiger mehrstuger<br />
Leitungstransformatoren ndet sich in Zinke-Brunswig, Band I).<br />
8 SAW-Filter<br />
Zur Realisierung von Filtern (insbesondere Bandpassltern) im Frequenzbereich 10MHz < f < 1GHz<br />
werden auch oft SAW-Filter (SAW = surface acoustic wave) eingesetzt (beispielsweise Zwischenfrequenz-<br />
Filter in Fernsehempfängern).<br />
Für SAW-Filter werden piezoelektrische Kristalle (z.B. Lithiumniobat (LiNbO 3 ), Lithiumtantalat (LiTaO 3 ),<br />
Quarz (SiO 2 ) ) mit Interdigitalwandlern versehen, so dass eine angelegte Spannung an den Interdigitalwandlern<br />
zu mechanischen Verformungen an der Kristalloberäche führt, die sich dann als akustische<br />
Oberächenwelle (englisch abgekürzt SAW) mit einer Ausbreitungsgeschwindigkeit von typischerweise<br />
v a = 3000 : : : 4000m/s ausbreiten. Dies führt beim oben angegebenen Frequenzbereich<br />
10MHz < f < 1GHz zu akustischen Wellenlängen £ = v a =f 3m : : : 400m.<br />
Abb. 16 zeigt ein SAW-Filter, es besteht aus 2 Interdigitalwandlern zur Wandlung des elektrischen<br />
Signals in das akustische Signal und wieder zurück.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/18<br />
Abb. 15: Anwendung der Kuroda-Transformation.<br />
Zum Verständnis des Filters ist der Interdigitalwandler genauer zu analysieren, wie er beispielsweise in<br />
Abb. 17 dargestellt ist.<br />
Eine angelegte Spannung u(t) führt zu elektrischen Feldern, wie sie durch Pfeile in Abb. 17 dargestellt<br />
sind. Diese Felder bewirken entsprechende mechanische Verformungen, die sich dann als SAW mit<br />
der Geschwindigkeit v a ausbreiten. Die Wirkung des Interdigitalwandlers lässt sich als Transversallter<br />
auassen, so dass sich das Ausgangssignal y (t) (mechanische Auslenkung oder dergleichen) innerhalb<br />
der SAW als Überlagerung der Wirkungen der einzelnen Fingerelemente darstellen lässt:<br />
y (t) =<br />
N∑<br />
n=1<br />
( 1) n w n u(t n) (54)<br />
mit der Laufzeit = p=v a zwischen den Fingerelementen und dem Wichtungskoezienten w n des<br />
n-ten Segmentes proportional zur Überlappung der jeweiligen Fingerelektroden, siehe Abb. 17.<br />
Für u(t) = (t) ((t)-Dirac Impuls) erhält man aus Gl.(54) die Impulsantwort y (t) = h(t) wie sie in<br />
Abb. 18 skizziert ist.<br />
Entsprechend der Laufzeit der SAW unterhalb des Interdigitalwandlers hat die Impulsantwort eine<br />
endliche Dauer T = N. Wenn die Zeitskala t 0 so eingeführt wird, dass sich der Impuls von t 0 = T=2<br />
bis t 0 = +T=2 erstreckt und nur die Frequenzkomponenten um f 0 = 1=2 herum betrachtet werden<br />
kann, gilt näherungsweise aus Abb. 18:<br />
h(t 0 ) = w (t 0 ) cos(2f 0 t 0 ) (55)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/19<br />
Abb. 16: Praktische Ausführung eines akustischen Oberächenwellenlters.<br />
Abb. 17: Interdigitalwandler.<br />
mit der quasi-kontinuierlichen Wichtungsfunktion w (t) mit w (t 0 ) = 0 für jt 0 j > T=2.<br />
Die Übertragungsfunktion G(j!) ergibt sich als Fouriertransformierte der Impulsantwort h(t 0 ) zu (vergleiche<br />
'Signale und Systeme'):<br />
G(j!) = 1 2<br />
[<br />
W (j(! !0 )) + W (j(! + ! 0 )) ] ; (56)<br />
wobei W (j!) die Fouriertransformierte von w (t) und ! 0 = 2f 0 bezeichnet.<br />
Beispiel: Für gleichlange Finger des SAW-Filters sind die Wichtungskoezienten w n konstant, so dass<br />
sich die Wichtungsfunktion w (t 0 ) als Rechteckfunktion darstellen lässt:<br />
⎧<br />
⎨<br />
w (t 0 ) =<br />
⎩<br />
1 jt 0 j < T 2<br />
0 jt 0 j > T 2<br />
so dass sich für die Übertragungsfunktion ergibt (vergleiche 'Signale und Systeme')<br />
⎡<br />
G(j!) = T (<br />
⎣ T si<br />
2 2 (! ! 0)<br />
)<br />
(57)<br />
+ si<br />
(<br />
T<br />
2 (! + ! 0)) ⎤ ⎦ (58)<br />
mit si(x) = sin(x)=x. Solange wir ein schmalbandiges Filter mit T ! 0 1 betrachten und uns auf<br />
positive Frequenzen beschränken, ist der zweite si-Term vernachlässigbar und wir erhalten:<br />
G(j!) ∣ ∣<br />
!>0<br />
T 2 si(T (f f 0)) (59)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Hochfrequenzlter FI/20<br />
Abb. 18: Impulsantwort (schematisch) eines Interdigitalwandlers.<br />
und es ergibt sich als 4 dB-Bandbreite B (Argument der si-Funktion = =2):<br />
B = 1 T = 2f 0<br />
N ; (60)<br />
die damit genau umgekehrt proportional ist zur Laufzeit der SAW unterhalb des Interdigitalwandlers.<br />
Die oben angegebene Übertragungsfunktion beinhaltet nur die Wandlung vom elektrischen ins akustische<br />
Signal, so dass die komplette Übertragungsfunktion (elektrisch - akustisch - elektrisch) durch<br />
G 2 (j!) beschrieben wird (Annahme gleicher Interdigitalwandler am Ein- und Ausgang) und die Bandbreite<br />
B gemäÿ Gl.(60) dann der 8 dB-Bandbreite entsprechen würde.<br />
Beim kompletten SAW-Filter ist zusätzlich noch die elektrische Beschaltung und insbesondere die<br />
Kapazität der Interdigitalwandler zu berücksichtigen.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/1<br />
Durch Rückkopplung kann ein Verstärker stabilisiert werden, er kann aber auch instabil werden und<br />
anfangen zu schwingen. Auch Oszillatoren stellen im Prinzip rückgekoppelte Verstärker dar.<br />
1 Breitbandverstärker<br />
Eine Anwendung für Verstärker mit Rückkopplung besteht in der Realisierung von Breitbandverstärkern.<br />
Als Beispiel werde ein Transimpedanzverstärker betrachtet, wie er in Abb. 1 dargestellt ist.<br />
Abb. 1: Prinzip eines Transimpedanzverstärkers mit bipolarem Transistor.<br />
Bei einem Transistor mit sehr hoher Strom- und Spannungsverstärkung ergibt sich näherungsweise<br />
U A ≈ −R K · I 1 , wobei R K dann als Transimpedanz bezeichnet wird.<br />
Durch den Rückkoppelwiderstand R K wird auch die Bandbreite des Verstärkers beeinflusst, wie im<br />
folgenden diskutiert werden soll. Die Koppelkapazität C K sei sehr groß (C K → ∞) und der Ausgang,<br />
abgesehen vom Widerstand R L , unbelastet, so dass sich aus Abb. 1 folgendes „Hochfrequenzschaltbild”<br />
1 ergibt.<br />
Abb. 2: „Hochfrequenzschaltbild” des Transimpedanzverstärkers aus Abb. 1.<br />
Der Bipolartransistor werde durch ein vereinfachtes Giacoletto-Ersatzschaltbild beschrieben:<br />
Dabei ist c csp die differentielle Kollektor-Basis-Sperrschichtkapazität, r e der differentielle Widerstand<br />
1 Im Hochfrequenzschaltbild stellen Gleichspannungen Kurzschlüsse dar, und die Einstellung des Arbeitspunktes wird<br />
nicht beachtet.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/2<br />
Abb. 3: Vereinfachtes Giacoletto-Ersatzschaltbild eines Bipolar-Transistors.<br />
der Basis-Emitter-Diode (r e = (kT/e)/I E , I E – Emitterstrom, k – Boltzmann-Konstante, T – absolute<br />
Temperatur, e – Elementarladung) und r e ′ = r e /β 0 (β 0 – Gleichstromverstärkung in Emitterschaltung)<br />
und c e ′ = 1/(r e · ω T ) mit der Transitfrequenz f T = ω T /2π.<br />
Damit folgt aus Abb. 2 und 3 das Ersatzschaltbild des Verstärkers.<br />
Abb. 4: Ersatzschaltbild des Verstärkers aus Abb. 1.<br />
Unter der Voraussetzung, dass für den Strom im Rückkoppelzweig gilt |I K | ≪ |I RL |, ergibt sich<br />
näherungsweise<br />
mit der inneren Verstärkung<br />
U A = −U 1<br />
R L<br />
r e<br />
= −U 1 · v i (1)<br />
v i = R L<br />
r e<br />
(2)<br />
Da U 1 und U A damit in einfacher Weise miteinander verknüpft sind, genügt es, für die Bestimmung<br />
der gesamten Übertragungsfunktion die Übertragungsfunktion von U G nach U 1 zu bestimmen.<br />
Unter Anwendung des Miller-Effektes (Miller-Kapazität) lassen sich R K und c csp aus dem Rückkoppelzweig<br />
transformieren, so dass sich der Eingangszweig gemäß Abb. 5 ergibt.<br />
Abbildung 5 lässt sich schließlich vereinfachen zu Abb. 6.<br />
Dabei stellt R ′ mit<br />
1<br />
R ′ = 1 r ′ e<br />
+ 1 + v i<br />
R K<br />
(3)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/3<br />
K<br />
Abb. 5: Ersatzschaltbild des Eingangszweigs des Verstärkers aus Abb. 1.<br />
Abb. 6: Vereinfachtes Ersatzschaltbild des Eingangszweigs des Verstärkers aus Abb. 1.<br />
die Parallelschaltung aus r ′ e und R K<br />
1+v i<br />
dar und<br />
C ′ = c ′ e + c csp (1 + v i ). (4)<br />
Abbildung 6 stellt einen Tiefpass 1. Ordnung dar gemäß:<br />
U 1<br />
U G<br />
=<br />
R ′<br />
R ′ + R G<br />
1<br />
1 + jω/ω g<br />
mit ω g = 1 C ′ (<br />
1<br />
R ′ + 1<br />
R G<br />
)<br />
(5)<br />
Die Grenzfrequenz ω g repräsentiert damit die Bandbreite des Breitbandverstärkers. Mit Gl. (1) und<br />
(2) gilt dann für die gesamte Übertragungsfunktion:<br />
mit der Verstärkung v m bei kleinen Frequenzen<br />
U A U<br />
= −v 1 v m<br />
i = −<br />
(6)<br />
U G U G 1 + jω/ω g<br />
v m =<br />
R L R ′<br />
r e (R ′ + R G )<br />
(7)<br />
Sowohl die Bandbreite ω g als auch die Verstärkung v m hängen von R ′ und damit vom Rückkoppelwiderstand<br />
R K ab. Von Interesse ist dabei das Verstärkungs-Bandbreite-Produkt<br />
v m · ω g =<br />
R L<br />
r e R G C ′ =<br />
1<br />
1 R G<br />
ω T R L<br />
+ c csp R G (1 + re<br />
R L<br />
) , (8)<br />
das unabhängig von R ′ und damit auch unabhängig vom Rückkoppelwiderstand R K wird. Durch Wahl<br />
von R K kann somit entweder ein Breitbandverstärker hoher Verstärkung und kleiner Bandbreite oder<br />
geringer Verstärkung und hoher Bandbreite realisiert werden.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/4<br />
Zahlenbeispiel: Als Beispiel sei angenommen R G = R L = 50 Ω, r e = 2, 5 Ω (Emitterstrom I E =<br />
10 mA), c csp = 0, 5 pF und f T = ω T<br />
2π<br />
= 5 GHz. Es ergibt sich dann ein Verstärkungs-Bandbreite-<br />
Produkt von v m · f g = v m ω g /(2π) ≈ 2, 75 GHz. Weiterhin ergibt sich mit β 0 = 30 und R K =<br />
3, 15 kΩ beispielsweise ein v m ≈ 10 und R ′ ≈ 50 Ω, so dass sich dann ein Breitbandverstärker<br />
mit der Bandbreite f g = 275 MHz und einer Verstärkung von 20 dB ergibt, der eingangsseitig<br />
reflexionsfrei an eine Leitung mit einem Wellenwiderstand Z L = 50 Ω angepasst ist.<br />
Abb. 7 zeigt das Beispiel eines Breitbandverstärkers mit f g ≈ 10 GHz basierend auf einem GaAs-<br />
MESFET. Die schwarzen Balken in Abb. 7 stellen Streifenleitungs-Elemente auf der Leiterplatte dar<br />
(oben Leiterbreite, unten Leiterlänge, jeweils in mm).<br />
Abb. 7: Breitbandverstärker (10 GHz) mit einem GaAs-MESFET (Quelle:Dissertation M. Martin, <strong>TU</strong><br />
<strong>Berlin</strong> 1987).<br />
2 Beschreibung rückgekoppelter Verstärker<br />
Zur systematischen Beschreibung rückgekoppelter Netzwerke betrachten wir Abb. 8 .<br />
Abb. 8: Rückgekoppeltes Netzwerk mit Verstärkung V und Rückkopplung K.<br />
Der Verstärker wird durch die Übertragungskunktion V charakterisiert mit<br />
B = V · A, (9)<br />
wobei A und B die Zeiger (bzw. Fouriertransformierten) von Spannungen, Strömen oder Wellenamplituden<br />
am Eingang und Ausgang des Netzwerkes darstellen. Die Übertragungsfunktion K des<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/5<br />
Rückkoppelnetzwerks wird durch<br />
A ′′ = K · B (10)<br />
charakterisiert, so dass sich unter Berücksichtigung des Summationspunkts am Eingang A = A ′ + A ′′<br />
ergibt:<br />
B = V · A = V (A ′ + A ′′ ) = V (A ′ + KB) (11)<br />
und damit<br />
B = V ′ · A ′ (12)<br />
mit<br />
V ′ =<br />
V<br />
1 − KV . (13)<br />
V ′ stellt damit die effektive Verstärkung das rückgekoppelten Verstärkers dar.<br />
• Für |1 − K · V | < 1 gilt |V ′ | > |V |. Wir sprechen dann von einer „Mitkopplung”.<br />
• Für |1 − K · V | > 1 gilt |V ′ | < |V |. Wir sprechen dann von einer „Gegenkopplung”.<br />
• Für K · V = 1 geht V ′ → ∞, so dass dann der Verstärker anfängt zu schwingen. Wir sprechen<br />
dann von einem „Oszillator”.<br />
Bei gegengekoppelten Systemen ist der Sonderfall sehr starker Gegenkopplung von Interesse mit |1 −<br />
K · V | ≫ 1, woraus sich dann mit Gl. (13)<br />
V ′ ≈ − 1 K<br />
für |1 − K · V | ≫ 1 (14)<br />
ergibt. Die Verstärkung ist dann nur noch von dem (z. B. passiven) Rückkoppelnetzwerk abhängig.<br />
Weiterhin kann z. B. durch Gegenkopplung die Bandbreite eines Breitbandverstärkers erhöht werden.<br />
Wenn wir für V ähnlich zu Gl. (6)<br />
v m<br />
V = −<br />
(15)<br />
1 + jω/ω g<br />
und K = K als reell und frequenzunabhängig annehmen, ergibt sich<br />
V ′ v m 1<br />
= −<br />
mit ω gr = ω g (1 + Kv m ), (16)<br />
1 + K · v m 1 + jω/ω gr<br />
so dass, wie schon oben diskutiert, die Bandbreite zwar erhöht werden kann, aber das Verstärkungs-<br />
Bandbreite-Produkt konstant bleibt.<br />
Das Verstärker-Netzwerk kann in verschiedener Weise mit dem Rückkoppelnetzwerk verschaltet werden.<br />
Es ergeben sich dann die vier Anordnungen gemäß Abb. 9.<br />
Der im oberen Abschnitt 1 diskutierte Transimpedanzverstärker gemäß Abb. 4 stellt dabei beispielsweise<br />
ein Netzwerk mit Parallel-Parallel-Rückkopplung (siehe Abb. 9d) dar, wie Abb. 10 verdeutlicht.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/6<br />
a) b)<br />
c) d)<br />
Abb. 9: Möglichkeiten der Verschaltung eines Verstärkers mit einem Rückkoppelnetzwerk: a) Serien-<br />
Parallel-Rückkopplung mit V = U 2 /U 1 , K = −U ′′<br />
1/U 2 , V ′ = U 2 /U ′ 1; b) Serien-Serien-Rückkopplung<br />
mit V = I 2 /U 1 , K = −U ′′<br />
1/I 2 , V ′ = I 2 /U ′ 1; c) Parallel-Serien-Rückkopplung mit V = I 2 /I 1 ,<br />
K = −I ′′<br />
1/I 2 , V ′ = I 2 /I ′ 1 und d) Parallel-Parallel-Rückkopplung mit V = U 2 /I 1 , K = −I ′′<br />
1/U 2 ,<br />
V ′ = U 2 /I ′ 1.<br />
Abb. 10: Transimpedanzverstärker als Netzwerk mit Parallel-Parallel-Rückkopplung.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/7<br />
3 Stabilität von rückgekoppelten Netzwerken<br />
Rückgekoppelte Netzwerke bergen das Problem möglicher Instabilität. So kann z. B. aus einer erwünschten<br />
Gegenkopplung durch auftretende Phasendrehungen eine unerwünschte Mitkopplung werden.<br />
Wie bei jedem Netzwerk muss auch ein rückgekoppeltes Netzwerk die Bedingung erfüllen, dass die<br />
Übertragungsfunktion V ′ (s) (s – komplexe Frequenz s = jω + σ der Laplace-Transformation) keine<br />
Polstellen in der rechten komplexen s-Halbebene (R(s) ≥ 0) aufweisen darf.<br />
3.1 Stabilitätskriterium nach Strecker-Nyquist<br />
Wir nehmen zunächst an, der Verstärker ohne Rückkopplung sei stabil, d. h. V (s) habe keine Pole in<br />
der rechten s-Halbebene. Damit dann V ′ (s) gemäß Gl. (13) auch stabil ist, darf auch V ′ (s) keine Pole<br />
in der rechten s-Halbebene aufweisen, d. h.<br />
für alle R(s) ≥ 0 muss K · V ≠ 1<br />
sein. Dazu ist es zweckmäßig, die konforme Abbildung von der komplexen s-Ebene in die komplexe<br />
K · V -Ebene zu betrachten, wie sie Abb. 11 zeigt.<br />
Abb. 11: Konforme Abbildung der komplexen s-Ebene in die K · V -Ebene.<br />
Der Bereich R(s) > 0 wird begrenzt durch die imaginäre Achse s = jω. Die Abbildung dieser Geraden<br />
s = jω in die K · V -Ebene (auch als „Ortskurve” bezeichnet) ist in Abb. 11 skizziert. Die konforme<br />
Abbildung ist im kleinen winkeltreu, so dass die rechte s-Halbebene in den schraffierten Bereich der<br />
K · V -Ebene abgebildet wird. Nun muss für stabiles Verhalten für alle R(s) ≥ 0 ein K · V ≠ 1 gelten,<br />
so dass der schraffierte Bereich in der K · V -Ebene den Punkt „+1” nicht beinhalten darf.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/8<br />
Damit lässt sich das Strecker-Nyquist-Kriterium wie folgt formulieren:<br />
Für stabiles Verhalten darf die Ortskurve (K · V )(jω) den Punkt „+1” nicht umschließen.<br />
Der rückgekoppelte Verstärker in Abb. 11 wäre also stabil.<br />
Beispiel: Gegenkopplung über mehrere Verstärkerstufen.<br />
Wir nehmen an, der Verstärker mit der Übertragungsfunktion V besteht aus n hintereinander<br />
geschalteter Stufen, die jeweils die Charakteristik eines Tiefpasses 1. Ordnung aufweisen, und<br />
die Rückkopplung K sei reell und frequenzunabhängig mit K = K, d. h.:<br />
K · V = −K · v m<br />
1<br />
(1 + j ω ω g<br />
) n . (17)<br />
Für n ∈ {1, 3} ist die Ortskurve (K · V )(jω) in Abb. 12 dargestellt (für n = 1 ergibt sich ein<br />
Kreis), während n = 2 der Darstellung in Abb. 11 entspricht.<br />
a) b)<br />
Abb. 12: Ortskurven (K · V )(jω) für gegengekoppelte Verstärker mit a) 1 Stufe (n = 1) und b) 3<br />
Stufen (n = 3) entsprechen Gl. (17). Kurve durchgezeichnet für ω > 0 und gestrichelt für ω < 0.<br />
Für n ∈ {1, 2} bleibt das Verhalten immer stabil, während bei n = 3 die Ortskurve den Punkt<br />
„+1” für K · v m ≥ 8 umschließt und damit der Verstärker instabil wird und anfängt zu schwingen.<br />
Das Problem bei der Rückkopplung über mehrere Stufen besteht darin, dass aus der gewünschten<br />
Gegenkopplung dann auf Grund der zusätzlichen Phasendrehung bei höheren Frequenzen eine Mitkopplung<br />
mit der entsprechenden Schwingneigung werden kann.<br />
3.2 Stabilitätskreis und Stabilitätsfaktor<br />
Allein durch die innere Rückkopplung, ausgedrückt durch den y-Parameter y 12<br />
, kann ein Verstärker<br />
instabil werden. Zur Untersuchung dieser Instabilität wird ein Verstärker, beschrieben durch seine y-<br />
Parameter, betrachtet, der mit der Lastadmittanz y L<br />
abgeschlossen ist (siehe Abb. 13).<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/9<br />
Abb. 13: Verstärker mit y-Parameterm und Lastadmittanz y L<br />
.<br />
Es soll nun die Eingangsadmittanz y E<br />
= I 1<br />
U 1<br />
dabei instabil werden, wenn R(y E<br />
) < 0 wird.<br />
des Verstärkers ermittelt werden. Ein Verstärker kann<br />
Für den Eingangskreis gilt:<br />
I 1 = y 11<br />
U 1 + y 12<br />
U 2 (18)<br />
und für den Ausgangskreis ergibt sich<br />
und damit<br />
0 = (y 22<br />
+ y L<br />
)U 2 + y 21<br />
U 1 (19)<br />
U 2 = − y 21<br />
y 22<br />
+ y L<br />
U 1 . (20)<br />
Wir können so U 2 in Gl. (18) eliminieren, und aus Gl. (18) ergibt sich:<br />
(<br />
I 1 = y 11<br />
− y 21 y )<br />
12<br />
U<br />
y 22<br />
+ y 1 (21)<br />
L<br />
und damit die zu untersuchende Eingangsadmittanz y E<br />
y E<br />
= I 1<br />
U 1<br />
= y 11<br />
− y 21 y 12<br />
y 22<br />
+ y L<br />
(22)<br />
Für R(y E<br />
) < 0 kann der Verstärker instabil werden, da dann der Verstärkereingang nicht mehr Energie<br />
aufnimmt, sondern Energie abgibt. Um nun zu erkennen, für welche Lastadmittanzen y L<br />
diese<br />
Instabilität auftreten kann, wird Gl. (22) nach y L<br />
aufgelöst:<br />
y L<br />
= −y 22<br />
− y 12 y 21<br />
y E<br />
− y 11<br />
. (23)<br />
Diese Beziehung lässt sich auffassen als eine konforme Abbildung von der komplexen Ebene der Eingangsadmittanz<br />
y E<br />
in die komplexe Ebene der Lastadmittanz y L<br />
. Insbesondere ist von Interesse, wohin<br />
die linke Halbebene von y E<br />
(mit R(y E<br />
) < 0 – also instabil) abgebildet wird (siehe Abb. 14). Die linke<br />
Halbebene der y E<br />
-Ebene wird damit in einen Kreis in der y L<br />
-Ebene abgebildet. Dieser Kreis wird als<br />
sog. „Stabilitätskreis” bezeichnet. Lastadmittanzen außerhalb dieses Stabilitätskreises führen damit zu<br />
einem stabilen Verstärkerverhalten, während Lastadmittanzen innerhalb dieses Kreises zu R(y E<br />
) < 0<br />
und damit zu instabilem Verhalten führen können.<br />
Passive Lastadmittanzen haben stets R(y L<br />
) > 0. Ein Verstärker wird als absolut stabil bezeichnet,<br />
wenn für derartige passive Lastadmittanzen immer auch R(y E ) > 0 gilt. Dies bedeutet, dass ein<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/10<br />
Abb. 14: Konforme Abbildung der linken y E<br />
-Halbebene in einen Kreis (Stabilitätskreis) in der y L<br />
-<br />
Ebene.<br />
Verstärker immer genau dann absolut stabil ist, wenn der Stabilitätskreis in der linken Halbebene der<br />
y L<br />
-Ebene liegt. Um eine Bedingung für die absolute Stabilität eines Verstärkers herzustellen, nehmen<br />
wir zunächst an, dass es doch irgendeine Lastadmittanz y L<br />
mit R(y L<br />
) > 0 gäbe, für die R(y E<br />
) = 0<br />
wird:<br />
( )<br />
R(y E<br />
) = ! y<br />
0 = R(y 11<br />
) − R 12<br />
y 21<br />
. (24)<br />
y 22<br />
+ y L<br />
Um die beiden R()-Ausdrücke besser auswerten zu können, schreiben wir y 12<br />
y 21<br />
und (y 22<br />
+ y L<br />
) nach<br />
Betrag und Phase<br />
Damit ergibt sich in Gl. (24):<br />
und damit<br />
y 12<br />
y 21<br />
= |y 12<br />
y 21<br />
| exp(jϕ)<br />
y 22<br />
+ y L<br />
= |y 22<br />
+ y L<br />
| exp(jϕ 2 ) = R(y 22 + y L )<br />
cos(ϕ 2 )<br />
exp(jϕ 2 ).<br />
cos(ϕ 2 )<br />
0 = R(y 11<br />
) − |y 12<br />
y 21<br />
|<br />
R(y 22<br />
+ y L<br />
) cos(ϕ − ϕ 2)<br />
R(y 11<br />
)R(y 22<br />
+ y L<br />
) = |y 12<br />
y 21<br />
| cos(ϕ 2 ) cos(ϕ − ϕ 2 )<br />
Diese Beziehung lässt sich auch schreiben als<br />
= 1 2 |y 12 y 21 |[cos(ϕ) + cos(2ϕ 2 − ϕ)].<br />
R(y 11<br />
)R(y 22<br />
+ y L<br />
) = 1 2 R(y 12 y 21 ) + 1 2 |y 12 y 21 | cos(2ϕ 2 − ϕ).<br />
Diese Gleichung ist offenbar bei R(y L<br />
) > 0 und beliebiger Phase ϕ 2 nur erfüllbar, wenn die folgende<br />
Ungleichung gilt (wir setzen dabei ein R(y 11<br />
) > 0 voraus):<br />
R(y 11<br />
)R(y 22<br />
) < 1 2 [R(y 12 y 21 ) + |y 12 y 21 |].<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/11<br />
Ist diese Gleichung nicht erfüllt, wenn also<br />
R(y 11<br />
)R(y 22<br />
) > 1 2 [R(y 12 y 21 ) + |y 12 y |] (25)<br />
21<br />
gilt, ist für beliebige Lastadmittanzen mit R(y L<br />
) > 0 eine Eingangsadmittanz R(y E<br />
) = 0 nicht<br />
möglich, so dass Gl. (25) die Bedingung dafür angibt, dass der Stabilitätskreis in der linken y L<br />
-<br />
Halbebene liegt. Damit ist unter der Voraussetzung von Gl. (25) der Verstärker absolut stabil.<br />
Zur Charakterisierung der Stabilität wird häufig ein Stabilitätsfaktor k eingeführt gemäß:<br />
k = 2R(y 11 )R(y 22 ) − R(y 12 y 21 ) . (26)<br />
|y 12<br />
y 21<br />
|<br />
Die Bedingung für absolute Stabilität nach Gl. (25) entspricht dabei k > 1. Für k < 1 ist der Verstärker<br />
nur bedingt stabil. Der Stabilitätsfaktor k kann auch mit Streuparametern formuliert werden:<br />
k = 1 + |S 11S 22 − S 12 S 21 | 2 − |S 11 | 2 − |S 22 | 2<br />
.<br />
2|S 12 S 21 |<br />
Abschließend soll noch ohne Beweis die maximale Verstärkung G ′ m bei eingangs- und ausgangsseitiger<br />
Anpassung angegeben werden:<br />
∣ G m ′ y ∣∣∣∣ (<br />
=<br />
21<br />
k − √ ∣<br />
)<br />
k<br />
∣y y ∣∣∣∣<br />
− 1 =<br />
21<br />
1<br />
∣<br />
12<br />
y 12 k + √ ,<br />
k 2 − 1<br />
k > 1. (27)<br />
Für k < 1 darf der Verstärker natürlich nicht eingangs- und ausgangsseitig angepasst werden, da er<br />
sonst anfängt zu schwingen.<br />
4 Oszillatoren<br />
Ein rückgekoppeltes Netzwerk wird zum Oszillator, wenn K · V = 1 wird. In diesem Sinn gibt es eine<br />
große Vielfalt bei der Realisierung von Oszillatoren.<br />
Abb. 15: Hochfrequenzschaltbild eines Oszillators mit den Reaktanzen X 1 , X 2 und X 3 .<br />
Als Beispiel wollen wir einen LC-Oszillator entsprechend Abb. 15 betrachten. X 1 , X 2 und X 3 stellen<br />
dabei Reaktanzen, also z. B. Induktivitäten oder Kapazitäten, dar. Wenn der FET in Abb. 15 nur durch<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/12<br />
Abb. 16: Ersatzschaltbild des Oszillators von Abb. 15.<br />
seine Steilheit S charakterisiert wird (keine Rückwirkung, Eingangs- und Ausgangsimpedanzen → ∞),<br />
ergibt sich das Ersatzschaltbild in Abb. 16.<br />
Die Anschwingbedingung für den Oszillator in Abb. 16 ergibt sich wahlweise aus K · V<br />
! = 1 oder der<br />
Bedingung det(y) = y 11<br />
y 22<br />
− y 12<br />
y 21<br />
= 0 (wenn man die y-Parameter der Anordnung in Abb. 16<br />
bestimmt) oder aus folgender anschaulicher Überlegung:<br />
In Abb. 16 gilt für die Verstärkung<br />
U 2<br />
= − S U 1 Y , (28)<br />
wobei Y der Parallelschaltung von jX 3 mit R L und der Serienschaltung von jX 1 und jX 2 entspricht:<br />
Y = 1 + 1 1<br />
+ . (29)<br />
jX 3 R L jX 1 + jX 2<br />
Andererseits gilt für die Rückwirkung vom Ausgang zum Eingang der Spannungsteiler<br />
U 1<br />
U 2<br />
=<br />
X 1<br />
X 1 + X 2<br />
. (30)<br />
Die Multiplikation von Gl. (28) und (30)führt dann auf die Anschwingbedingung:<br />
U 1<br />
U 2<br />
U 2<br />
U 1<br />
!<br />
= 1 = − S Y<br />
Um Gl. (31) zu erfüllen, muss zunächst Y reell sein, so dass gelten muss:<br />
und damit<br />
X 1<br />
X 1 + X 2<br />
. (31)<br />
1 1 !<br />
+<br />
= 0 (32)<br />
jX 3 jX 1 + jX 2<br />
X 1 + X 2 + X 3<br />
!<br />
= 0. (33)<br />
Gl. (33) stellt die Phasenbedingung für das Anschwingen des Oszillators dar. Mit Gültigkeit von Gl.<br />
(33) wird Y = 1<br />
R L<br />
und X 1 + X 2 = −X 3 , so dass sich aus Gl. (31) ergibt:<br />
S · R L · X1<br />
X 3<br />
!<br />
= 1 (34)<br />
Die Steilheit S in Gl. (34) gibt die Steilheit an, die mindestens erforderlich ist, damit der Oszillator<br />
anschwingt (Anschwingsteilheit). Weiterhin zeigt Gl. (34), dass X 1 und X 3 das gleiche Vorzeichen und<br />
damit den gleichen Reaktanztyp (z. B. beide Reaktanzen induktiv oder beide Reaktanzen kapazitiv)<br />
aufweisen müssen.<br />
Es ergeben sich dann grundsätzlich zwei Möglichkeiten:<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Rückkopplung von Verstärkern RÜ/13<br />
induktive Dreipunktschaltung<br />
Hier sind X 1 und X 3 induktiv mit X 1 = ωL 1 und X 3 = ωL 3 und jX 2 = 1<br />
jωC 2<br />
, woraus sich die<br />
Schwingfrequenz ω 0 zu<br />
ω0 2 = 1 ( )<br />
1<br />
C 2 L 1 + L 3<br />
und die Anschwingsteilheit aus Gl. (34) zu<br />
ergeben.<br />
kapazitive Dreipunktschaltung<br />
S = 1<br />
R L<br />
L 3<br />
L 1<br />
Hier sind X 1 und X 3 kapazitiv mit jX 1 = 1<br />
jωC 1<br />
und jX 3 = 1<br />
jωC 3<br />
und X 2 induktiv mit X 2 = ωL 2 .<br />
Es ergeben sich dann ω 0 aus Gl. (33) zu<br />
und die Anschwingsteilheit aus Gl. (34) zu<br />
ω 2 0 = 1 L 2<br />
( 1<br />
C 1<br />
+ 1 C 3<br />
)<br />
S = 1<br />
R L<br />
C 1<br />
C 3<br />
Die kapazitive Dreipunktschaltung wird auch als Colpitts-Oszillator bezeichnet. Der Vorteil gegenüber<br />
der induktiven Dreipunktschaltung besteht darin, dass nur eine Induktivität benötigt wird, wobei diese<br />
Induktivität z. B. auch durch einen Schwingquarz (der sich dann im induktiven Arbeitspunkt befindet)<br />
realisiert werden kann.<br />
Ein Realisierungsbeispiel für einen Colpitts-Oszillator mit bipolarem Transistor zeigt Abb. 17.<br />
Abb. 17: Schaltungsbeispiel für einen Colpitts-Oszillator.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/1<br />
Das Ziel eines Mischers besteht darin, ein Signal einer Frequenz ! 1 auf eine andere Frequenz ! 2<br />
umzusetzen.<br />
Beispielsweise liegt das Eingangssignal von einer Antenne bei einer hohen Frequenz vor, welches dann<br />
zur einfacheren Signalverarbeitung auf eine kleinere Frequenz umgesetzt werden soll. Diese Funktion<br />
wird von einem sog. Mischer vorgenommen.<br />
1 Mischprinzipien<br />
Das Prinzip eines Mischers besteht darin, das Eingangssignal mit einem Lokal-Oszillator-Signal zu<br />
multiplizieren, wie in Abb. 1 schematisch dargestellt ist.<br />
Eingangssignal<br />
u s (t) u ZF (t)<br />
Zwischenfrequenzsignal<br />
ω 1 ω z = |ω 0 − ω 1 |<br />
ω 0<br />
Lokaloszillator<br />
Abb. 1: Grundprinzip eines Mischers.<br />
Wir nehmen zunächst ein harmonisches Eingangssignal u s (t) an:<br />
u s (t) = < [ U S exp(j! 1 t) ] = ^U S cos(! 1 t + ' 1 ) = 1 2<br />
Der Zeiger U S ist dabei durch U S =<br />
Frequenz ! 0 ,<br />
u 0 (t) = 1 2<br />
[<br />
US exp(j! 1 t) + U £ S exp( j! 1t) ] (1)<br />
^U S exp(j' 1 ) charakterisiert. Der Lokaloszillator hat die feste<br />
(<br />
)<br />
^U 0 exp(j! 0 t) + c:c: ; (2)<br />
wobei c:c: für konjugiert komplex (engl. conjugate complex) steht. Der Mischer vollzieht eine Multiplikation<br />
von u 0 (t) und u s (t):<br />
u s (t) ¡ u 0 (t) = 1 { [ ] [<br />
^U 0 U S exp[j(! 0 + ! 1 )t] + c:c + ^U 0 U £ S exp[j(! 0 ! 1 )t] + c:c:] } (3)<br />
4<br />
Nach der Multiplikation entstehen damit Signale sowohl bei der Summenfrequenz (! 0 + ! 1 ) als auch<br />
bei der Dierenzfrequenz (! 0 ! 1 ). Wir gehen zunächst von einem Mischer aus, der das Eingangssignal<br />
von einer hohen Frequenz ! 1 auf eine niedrige Frequenz ! z = j! 0 ! 1 j, der sogenannten<br />
Zwischenfrequenz, umsetzt. Es wird dann nur die Dierenzfrequenz aus Gl. (3) verwendet (nach<br />
entsprechender Filterung), so dass sich für das Zwischenfrequenzsignal ergibt:<br />
u ZF (t) = A 1 ^U 0 ^U S cos(! z t ' 1 ) für ! 0 > ! 1 (4)<br />
2<br />
bzw.<br />
u ZF (t) = A 1 ^U 0 ^U S cos(! z t + ' 1 ) für ! 0 < ! 1 (5)<br />
2<br />
A ist dabei eine charakteristische Konstante des Multiplizierers. u ZF (t) gibt dabei sowohl die Amplitude<br />
^U S als auch die Phase ' 1 des Eingangssignals wieder, wobei die Phase für ! 0 < ! 1 in Gleichlage und<br />
für ! 0 > ! 1 in Kehrlage wiedergegeben wird.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/2<br />
Wir unterscheiden damit zwischen Gleichlage- und Kehrlage-Mischern. Weiterhin unterscheiden wir<br />
zwischen Aufwärts- und Abwärtsmischern, je nachdem ob ! z gröÿer oder kleiner als ! 1 ist. Wir kommen<br />
damit zu folgenden Mischprinzipien:<br />
1. ! 0 < ! 1 :<br />
a) ! z = ! 1 ! 0 : Abwärtsmischer in Gleichlage<br />
b) ! z = ! 1 + ! 0 : Aufwärtsmischer in Gleichlage<br />
2. ! 0 > ! 1 :<br />
a) ! z = ! 0 ! 1 : Abwärtsmischer in Kehrlage (für ! z < ! 1 , sonst Aufwärtsmischer)<br />
b) ! z = ! 0 + ! 1 : Aufwärtsmischer in Gleichlage<br />
Die obigen Betrachtungen lassen sich auch auf nicht-harmonische Signale u s (t) verallgemeinern, wobei<br />
u s (t) durch seine Fouriertransformierte U S (j!) dargestellt wird:<br />
u s (t) ❞ US (j!) (6)<br />
Mit einem Lokaloszillator-Signal<br />
u 0 (t) = 2 cos(! 0 t) (7)<br />
gilt dann<br />
u s (t) ¡ u 0 (t) = U S<br />
(<br />
j(! !0 ) ) + U S<br />
(<br />
j(! + !0 ) ) : (8)<br />
Das Eingangsignal wird damit um die Frequenz ! 0 sowohl nach oben als auch nach unten verschoben,<br />
es bleibt aber ansonsten unverändert, so dass keine Informationen verloren gehen.<br />
Für einen Abwärtsmischer in Kehrlage entsprechend 2a) in obiger Darstellung (! 0 > ! 1 , ! z = ! 0 ! 1 )<br />
ergibt sich das Spektrum in Abb. 2. Als Ausgangssignal werden die Spektralkomponenten um ! z =<br />
! 0 ! 1 herum herausgeltert.<br />
U S (j(ω + ω 0)) U S (jω)<br />
U S (j(ω − ω 0))<br />
−(ω 0 + ω 1) −ω 0 −ω 1 −(ω 0 − ω 1) +(ω 0 − ω 1) +ω 1 +ω 0<br />
+(ω 0 + ω 1)<br />
Abb. 2: Eingangs- und Ausgangsspektrum für einen Kehrlage-Abwärtsmischer.<br />
1.1 Spiegelfrequenz<br />
Wenn wir einen Kehrlage-Abwärtsmischer voraussetzen mit einer festen (durch die Wahl des Filters am<br />
Ausgang festgelegten) Zwischenfrequenz ! z , liegt die gewünschte Eingangsfrequenz bei ! 1 = ! 0 ! z .<br />
Es ist allerdings zu beachten, dass dann auch (unerwünscht) ein Eingangssignal bei der Frequenz<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/3<br />
! 0 1 = ! 0 + ! z auf die gleiche Zwischenfrequenz ! z umgesetzt wird. ! 0 1<br />
wird als Spiegelfrequenz<br />
bezeichnet, und der Abstand zwischen Soll-Eingangsfrequenz und Spiegelfrequenz ist durch<br />
! 0 1<br />
! 1 = 2! z ; (9)<br />
also die doppelte Zwischenfrequenz gegeben.<br />
Um damit ein eindeutiges Zwischenfrequenzsignal zu ermöglichen, muss die Spiegelfrequenz am Eingang<br />
durch entsprechende Filterung unterdrückt werden.<br />
Es ist damit ein Kompromiss zu nden zwischen einer einfachen Filterrealisierung am Eingang (möglichst<br />
hohe Zwischenfrequenz) und einer unproblematischen Signalverarbeitung (möglichst niedrige<br />
Zwischenfrequenz). Gegebenenfalls können auch mehrere Mischstufen hintereinander geschaltet werden<br />
(zunächst hohe Zwischenfrequenz und am Ausgang niedrige Zwischenfrequenz).<br />
2 Realisierung von Mischern mit nichtlinearen Kennlinien<br />
Die Multiplikation auch bei hohen Frequenzen lässt sich durch nichtlineare Kennlinien realisieren. Beispielsweise<br />
eignen sich dazu nichtlineare Kennlinien zwischen Strom und Spannung bei Dioden und<br />
Transistoren.<br />
Abb. 3: Strom und Spannung bei Dioden und Transistoren.<br />
Der Zusammenhang zwischen dem Strom i (t) und der Spannung u(t) ist dabei durch<br />
i = f (u) (10)<br />
gegeben mit der nichtlinearen Funktion f (u). Zur Vereinfachung wollen wir hier annehmen, dass der<br />
Strom i instantan der Spannung u folgt und Ladungsspeichereekte vernachlässigt werden können.<br />
2.1 Hochfrequenzgleichrichtung<br />
Bevor wir uns dem eigentlichen Mischer zuwenden, wollen wir eine nichtlineare Kennlinie i = f (u)<br />
betrachten, die nur von einem harmonischen Signal<br />
u(t) = U g + ^U cos(!t): (11)<br />
ausgesteuert wird.<br />
Es sei<br />
i (t) = f (u(t)) = I S<br />
⎡<br />
( )<br />
u(t)<br />
⎣ exp<br />
U T<br />
1<br />
⎤<br />
⎦ (12)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/4<br />
Abb. 4: Beispielhafter Verlauf von u(t) und i (t) bei einer Diodenkennlinie (hier mit ^U = U T<br />
U g = 0; 6U T ).<br />
und<br />
mit dem Sperrstrom I S und der Temperaturspannung U T = kT e<br />
(U T = 26 mV bei Raumtemperatur<br />
T = 290 K). Im Abb. 4 ist der Verlauf zwischen u(t) und i (t) beispielhaft skizziert.<br />
Der Strom i (t) ist dann immer noch periodisch mit der Periodendauer = 2 !<br />
, so dass dann i (t) als<br />
Fourierreihe geschrieben werden kann:<br />
mit den Fourierkozienten<br />
A m = 1 <br />
+=2 ∫<br />
=2<br />
i (t) =<br />
i (t) exp( jm!t) dt = 1 <br />
+1 ∑<br />
m= 1<br />
+=2 ∫<br />
=2<br />
A m exp(jm!t) (13)<br />
⎛ [<br />
Ug +<br />
I S<br />
⎝ ^U<br />
]<br />
cos(!t)<br />
exp<br />
U T<br />
1<br />
⎞<br />
⎠ exp( jm!t) dt (14)<br />
Zur Lösung von Gl. (14) wird die modizierte Besselfunktion I m (x ) der Ordnung m eingeführt:<br />
so dass sich aus Gl. (14) ergibt:<br />
A m = I S exp<br />
I m (x ) = 1<br />
2<br />
(<br />
Ug<br />
U T<br />
)<br />
∫<br />
+<br />
<br />
I m<br />
( ^U<br />
U T<br />
)<br />
⎡ ( ) ( )<br />
Ug<br />
A 0 = I S<br />
⎣ ^U<br />
exp I 0<br />
U T U T<br />
exp(x cos y ) cos(my ) dy; (15)<br />
1<br />
⎤<br />
für m 6= 0 (16)<br />
⎦ für m = 0 (17)<br />
In Abb. 5 sind modizierte Besselfunktionen beispielhaft dargestellt.<br />
Solange die Diodenkennlinie nur schwach ausgesteuert wird ( ^U U T ), ergibt sich auch für den Strom<br />
ein nahezu harmonischer Verlauf, wobei die Verzerrungen durch die Fourierkoezienten A m mit m 2<br />
charakterisiert werden. Gelegentlich wird auch ein Klirrfaktor eingeführt, wobei der Klirrfaktor der<br />
Ordnung m gegeben ist als<br />
A m<br />
k m =<br />
∣<br />
A 1<br />
∣ ∣∣∣∣<br />
: (18)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/5<br />
I m<br />
I 0<br />
I 1<br />
I 2<br />
I 3<br />
Abb. 5: Modizierte Besselfunktionen I m (x ) der Ordnung m = 0 : : : 3.<br />
x<br />
Zur einfacheren Analyse von A m ist es zweckmäÿig, Näherungen für I m (x ) für kleine und groÿe Argumente<br />
von x einzuführen. So gilt für x 1:<br />
I m (x ) 1 m!<br />
( x<br />
2<br />
) m<br />
für m 6= 0 (19)<br />
I 0 (x ) 1 + x 2<br />
während für x 1 sich alle I m (x ) dem Grenzwert<br />
2<br />
für m = 0 (20)<br />
nähern.<br />
I m (x ) exp(x p<br />
)<br />
2x<br />
(21)<br />
Beispiel:<br />
Als Beispiel werde die Gleichrichterschaltung in Abb. 6 betrachtet. Die Kapazität C sei sehr<br />
groÿ, so dass an ihr nur die Gleichspannung U g abfällt. U g hängt zusammen mit dem Gleichstrom<br />
von i (t), der sich mit Gl. (13) zu A 0 ergibt. Damit gilt<br />
U g = A 0 ¡ R (22)<br />
und damit ergibt sich mit Gl. (17)<br />
U g = I S ¡ R<br />
⎡<br />
⎣ exp<br />
(<br />
Ug<br />
U T<br />
)<br />
I 0<br />
( ^U<br />
U T<br />
)<br />
1<br />
⎤<br />
⎦ ; (23)<br />
woraus sich die Gleichrichtspannung U g als Funktion der Hochfrequenz-Wechselspannung ^U<br />
bestimmen lässt. Für ^U U T folgt aus Gl. (23) mit Gl. (20):<br />
U g =<br />
⎛<br />
^U 2<br />
⎝ 1<br />
U T 2 + U T<br />
I S ¡R<br />
⎞<br />
⎠ ; (24)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/6<br />
so dass man dann auch von einer quadratischen Gleichrichtung spricht. Für ^U U T folgt aus<br />
Gl. (23) mit Gl. (21):<br />
U g = ^U; (25)<br />
so dass man dann von linearer Hochfrequenz-Gleichrichtung spricht.<br />
Abb. 6: Schaltung zur Hochfrequenzgleichrichtung.<br />
2.2 Mischer mit nichtlinearer Transistorkennlinie<br />
Wir betrachten entsprechend Abb. 3 einen Transistor, der mit einer Überlagerung aus Signal- und<br />
Lokaloszillator-Spannung ausgesteuert wird. Es gilt damit für u(t):<br />
Für das Lokaloszillator-Signal gilt<br />
u(t) = u s (t) + u 0 (t): (26)<br />
u 0 (t) = U g + ^U 0 cos(! 0 t): (27)<br />
Weiterhin soll der Transistor durch das Eingangssignal u s (t) nur schwach ausgesteuert werden, so dass<br />
gilt. Diese Aussteuerung ist in Abb. 7 skizziert. Es gilt<br />
i (t) = f (u(t)) = f (u 0 (t) + u s (t)) = f (u 0 (t)) + u s (t)<br />
ju s (t)j ^U 0 : (28)<br />
df (u)<br />
du<br />
∣<br />
∣<br />
u=u0 (t)<br />
+ : : : (29)<br />
Gl. (29) stellt die Taylor-Entwicklung von f (u) um u 0 (t) herum dar, wobei nur das erste Glied der<br />
df (u)<br />
Taylor-Entwicklung dargestellt ist.<br />
du j u=u 0 (t) stellt die durch das Lokaloszillator-Signal gesteuerte<br />
zeitabhängige Steilheit des Transistors dar. Diese Steilheit ändert sich periodisch entsprechend<br />
der Frequenz des Lokaloszillators und wird mit dem Eingangssignal multipliziert. Diese Multiplikation<br />
df (u)<br />
führt zu der gewünschten Frequenzumsetzung. Die Steilheit S(t) =<br />
du<br />
j u=u 0 (t) lässt sich wieder als<br />
Fourierreihe darstellen:<br />
S(t) =<br />
df (u)<br />
du<br />
∣<br />
∣<br />
u=u0 (t)<br />
=<br />
+1 ∑<br />
m= 1<br />
Y m exp(jm! 0 t) (30)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/7<br />
i = f (u)<br />
Steigung<br />
( ) df<br />
du<br />
U g<br />
u s (t)<br />
u<br />
u 0 (t)<br />
Zeit t<br />
Abb. 7: Die Kennlinie i = f (u) wird von u s (t) und u 0 (t) ausgesteuert, wobei die Kennlinie im Bereich<br />
der Aussteuerung von u s (t) im Wesentlichen linear ist. Da der Parameter df durch du u 0(t) gesteuert<br />
wird, spricht man auch von einer parametrischen Schaltung.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/8<br />
Beispiel:<br />
Beim bipolaren Transistor gilt für den Zusammenhang zwischen Strom und Spannung die<br />
Diodenkennlinie von Gl. (6), so dass für die Ableitung<br />
df<br />
I ( )<br />
S u0 (t)<br />
du<br />
∣ = exp<br />
(31)<br />
U T U T<br />
∣<br />
u0 (t)<br />
gilt. Für u 0 (t) entsprechend Gl. (27) ergeben sich die Fourierkoezienten Y m<br />
zu:<br />
Y m = 1 <br />
+=2 ∫<br />
=2<br />
I S<br />
U T<br />
exp<br />
( )<br />
u0 (t)<br />
exp( jm! 0 t) dt (32)<br />
U T<br />
Y I ( ) ( )<br />
S Ug ^U0<br />
m = exp I m<br />
U T U T U T<br />
wieder mit der modizierten Besselfunktion I m (x ).<br />
(33)<br />
Das gesamte Spektrum des Stroms i (t) gemäÿ Gl. (10) ergibt sich mit Gl. (30) und u s (t) =<br />
1=2[U S exp(j! 1 t) + c:c:] zu:<br />
i (t) = f (u 0 (t)) + 1 2<br />
+1 ∑<br />
m= 1<br />
[<br />
US ¡ Y m exp(j(m! 0 + ! 1 )t) + U £ S ¡ Y m exp(j(m! 0 ! 1 )t) ] (34)<br />
Der erste Term f (u 0 (t)) beinhaltet ähnlich zu Gl. (6) die Harmonischen des Lokaloszillator-Signals<br />
m ¡ ! 0 , während im zweiten Term die Mischprodukte (m! 0 + ! 1 , m! 0 ! 1 ) erscheinen.<br />
Wenn wir als Beispiel einen Kehrlage-Abwärtsmischer betrachten (! 0 > ! 1 , ! z = ! 0 ! 1 ), ergibt<br />
sich das Zwischenfrequenzsignal bei ! z aus Gl. (34) zu:<br />
i ZF (t) = 1 2<br />
[<br />
Y 1 U £ S exp(j(! 0 ! 1 )t) + Y £ 1 U S exp( j(! 0 ! 1 )t) ] ; (35)<br />
wobei wir von Y 1 = Y £ 1<br />
Gebrauch gemacht haben.<br />
Das Zwischenfrequenzsignal lässt sich damit durch einen Zeiger<br />
I ZF = Y 1 ¡ U £ S (36)<br />
darstellen, wobei Y 1 die Übertragung von der Signalspannung zum Zwischenfrequenzstrom beschreibt.<br />
Y 1 wird deshalb auch als Mischsteilheit bezeichnet.<br />
Im obigen Beispiel haben wir die Umsetzung eines Eingangssignals bei der Frequenz ! 1 auf die Zwischenfrequenz<br />
(! 0 ! 1 ) beschrieben. Wir sprechen dann von einem Grundwellenmischer.<br />
Es lassen sich aber auch die Oberwellen von ! 0 ausnutzen, indem man die Eingangsfrequenz ! 1 auf<br />
die Zwischenfrequenz (m ¡ ! 0 ! 1 ) umsetzt. Man spricht dann von einem Oberwellenmischer mit der<br />
Mischsteilheit Y m . Die Ezienz eines Oberwellenmischers ist geringer als die eines Grundwellenmischers;<br />
dafür genügt aber die Realisierung eines Lokaloszillators bei einer um den Faktor m niedrigeren<br />
Frequenz.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/9<br />
Abb. 8: Prinzipieller Aufbau eines Heterodyn-Empfängers.<br />
3 Beispiele für die Realisierung von Mischern<br />
Ein typisches Beispiel für einen Mischer ist ein Heterodyn-Empfänger, wie er in Abb. 8 dargestellt<br />
ist.<br />
Er besteht aus einem Vorverstärker mit einem Filter zu Unterdrückung der Spiegelfrequenz. Das Eingangssignal<br />
wird mit einem Mischer auf eine feste Zwischenfrequenz umgesetzt, die dann ein ZF-Filter<br />
passiert, bevor es der Demodulation bzw. der weiteren Signalverarbeitung zugeführt wird. Die Frequenz<br />
des Lokaloszillators (variabel) wird dabei so eingestellt, dass die gewünschte Eingangsfrequenz korrekt<br />
auf die feste voreingestellte Zwischenfrequenz umgesetzt wird.<br />
Beispiele dafür stellen Rundfunkempfänger dar, wobei in Abb. 9 beispielhaft ein FM-Tuner (UKW-<br />
Empfänger) dargestellt ist. Es handelt sich dabei um eine ältere Schaltungsrealisierung (ca. 1970), die<br />
mit einer geringen Zahl von diskreten Bauelementen die in Abb. 8 genannten Funktionen, Vorverstärker,<br />
Spiegelfrequenzlter, Mischer, Lokaloszillator und ZF-Filter realisiert.<br />
Wir haben dort einen FET-Vorverstärker mit eingangs- und ausgangsseitigem Filter (abstimmbar zur<br />
Unterdrückung der jeweiligen Spiegelfrequenz). Der untere Teil der Schaltung stellt einen Colpitts-<br />
Oszillator dar (vgl. Abb. 17 in Abschnitt RÜ) ,und die Mischstufe wird durch einen Bipolartransistor<br />
dargestellt, an den sich am Ausgang ein Filter bei der Zwischenfrequenz um 10,7 MHz anschlieÿt.<br />
Neben den oben dargestellten Mischern mit Transistoren lassen sich auch Mischer mit nichtlinearen<br />
Kennlinien anderer Bauelemente realisieren. Jenseits der Grenzfrequenz von Transistoren lassen<br />
sich beispielsweise Schottky-Dioden (vgl. <strong>Skript</strong> Hochfrequenztechnik I) einsetzen, da diese eine sehr<br />
schnelle Steuerung des dierentiellen Widerstands ermöglichen (einsetzbar bis Frequenzen im Bereich<br />
von 1000 GHz), wie weiter unten genauer erläutert wird.<br />
Der Frequenzbereich von ca. 1100 THz (1 THz=10 12 Hz) ist technisch nur schwer zugänglich, während<br />
Mischer im optischen Frequenzbereich oberhalb von ca. 100 THz ( 0 3 m) wieder sehr einfach<br />
mit Hilfe von Fotodioden realisiert werden können. Das Prinzip einer Mischung im optischen Frequenzbereich<br />
ist in Abb.10 skizziert.<br />
Das Feld des Eingangssignals E s (t) (bei der optischen Frequenz ! 1 ) wird mit dem Feld des Lokaloszillatorsignals<br />
E 0 (t) bei der Frequenz ! 0 überlagert, so dass sich an der Fotodiode ein Feld<br />
E(t) = E 0 (t) + E s (t) (37)<br />
ergibt. Der Fotostrom i (t) ist proportional zur einfallenden optischen Leistung und damit proportional<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/10<br />
Abb. 9: Realisierungsbeispiel für einen FM-Tuner mit diskreten Bauelementen.<br />
Abb. 10: Prinzip eines Mischers von zwei optischen Signalen mit einer Fotodiode.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/11<br />
zu E 2 (t), so dass sich ergibt:<br />
i (t) / E 2 (t) = E 2 0 + E2 s + 2E 0(t)E s (t) (38)<br />
Der Mischterm in Gl. (38) wird durch E 0 (t)E s (t) repräsentiert, wobei bei dieser Multiplikation die<br />
gewünschte Zwischenfrequenz ! z = j! 0 ! 1 j entsteht. Dieses Prinzip wird in der kohärenten optischen<br />
Nachrichtentechnik angewandt.<br />
4 Mischer mit Schottky-Dioden<br />
Die Schottky-Diode wird wieder durch eine Dioden-Kennlinie i = f (u) entsprechend Gl. (12) charakterisiert,<br />
wobei der Einuss von parasitäten Kapazitäten sehr gering ist.<br />
Die Schottky-Diode wird nur mit einer Überlagerung von Lokaloszillator, Eingangssignal und Zwischenfrequenzsignal<br />
ausgesteuert, wobei diese drei Signale in irgendeiner Weise an die Schottky-Diode<br />
herangeführt werden müssen. Um die im Allgemeinen recht komplizierte Analyse handhabbar zu machen,<br />
wollen wir hier als Beispiel eine ideale Spannungseinprägung voraussetzen.<br />
An der Schottky-Diode liegt dann die Summenspannung aus der Lokaloszillator-Spannung u 0 (t), der<br />
Eingangssignal-Spannung u s (t) und der ZF-Signal-Spannung u ZF (t) an.<br />
ω 0<br />
ω 1<br />
ω z =(ω 1 − ω 0 )<br />
Abb. 11: Schematische Anordnung eines Mischers mit einer Schottky-Diode und<br />
Spannungseinprägung.<br />
Das Prinzip einer solchen Spannungseinprägung ist in Abb. 11 skizziert. Die in Abb. 11 eingezeichneten<br />
Schwingkreise sind symbolisch so zu verstehen, dass sie für alle anderen Frequenzen als die jeweilige<br />
Soll-Frequenz Kurzschlüsse darstellen. Wie in Abb. 7 wird die Diodenkennlinie im Wesentlichen durch<br />
das Lokaloszillator-Signal u 0 (t) ausgesteuert, während sie durch u s (t), u ZF (t) nur im linearen Bereich<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/12<br />
betrieben wird. Der Strom durch die Schottky-Diode i (t) ergibt sich dann ähnlich wie in Gl. (29) zu<br />
i (t) = f (u(t)) = f [u 0 (t)) + u s (t) + u ZF (t)] = f (u 0 (t)) + [u s (t) + u ZF (t)] df<br />
∣ ; (39)<br />
du<br />
∣<br />
u0 (t)<br />
wobei sich df<br />
du j u 0 (t) als ein zeitabhängiger Leitwert g(t) auassen lässt, der sich periodisch mit der<br />
Periode = 2=! 0 wieder wie in Gl. (20) als Fourierreihe entwickeln lässt:<br />
df<br />
+1 ∑<br />
g(t) = du<br />
=<br />
∣ m= u0<br />
1<br />
(t)<br />
Y m exp(jm! 0 t); (40)<br />
wobei Y m = Y £ m für alle reellen g(t) gelten muss.<br />
Die Mischung mit der Schottky-Diode erfolgt also im Wesentlichen dadurch, dass durch Aussteuerung<br />
der Schottky-Diode mit u 0 (t) ein zeitabhängiger dierentieller Leitwert g(t) entsteht.<br />
Damit entspricht Abb. 11 der Anordnung in Abb. 12.<br />
Signalkreis<br />
ZF-Kreis<br />
ω 1 ω z =(ω 1 − ω 0 )<br />
Abb. 12: Mischung mit einem sich periodisch verändernden Leitwert g(t) (resistiver Mischer) und<br />
Spannungseinprägung.<br />
Aus Abb. 12 folgt<br />
i (t) = [ u s (t) + u ZF (t) ] g(t); (41)<br />
was genau Gl. (39) entspricht (ohne den für die Mischung unerheblichen Term f [u 0 (t)]). Das g(t) in<br />
Abb. 12 muss nicht unbedingt mit einer Schottky-Diode realisiert werden, möglich ist z. B. auch die<br />
Steuerung des Kanalleitwerts eines FETs durch die Gate-Source-Spannung.<br />
Für einen Gleichlage-Abwärtsmischer (! 1 > ! 0 , ! z = ! 1 ! 0 ) führt Gl. (41) mit<br />
und g(t) gemäÿ Gl. (40) auf<br />
i (t) = 1 2<br />
u s (t) = 1 2<br />
u ZF (t) = 1 2<br />
[<br />
US exp(j! 1 t) + c:c: ] (42)<br />
[<br />
UZF exp(j(! 1 ! 0 )t) + c:c: ] (43)<br />
[<br />
US exp(j! 1 t) + U ZF exp(j(! 1 ! 0 )t) + c:c: ] +1 ∑<br />
m= 1<br />
Y m exp(jm! 0 t) (44)<br />
Gl. (44) führt auf unendlich viele Frequenzkomponenten j! 1 ¦ m! 0 j, wovon für den Mischvorgang<br />
in Abb. 12 nur die Frequenzkomponenten bei ! 1 und ! z = (! 1 ! 0 ) interessieren, da alle anderen<br />
Frequenzkomponenten im Rahmen des Ansatzes der Spannungseinprägung kurzgeschlossen werden.<br />
Aus Gl. (44) folgt für die Stromkomponenten bei ! 1 und (! 1 ! 0 ) (Y 1 = Y £ 1; Y = Y 0 reell)<br />
i (t) = 1 2<br />
[<br />
(US ¡ Y 0 + U ZF ¡ Y 1 ) exp(j! 1 t) + (U ZF Y 0 + U S ¡ Y £ 1 ) exp(j(! 1 ! 0 )t) + c:c: ] ; (45)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/13<br />
wobei für die Ströme bei der Signalfrequenz und Zwischenfrequenz wieder Stromzeiger eingeführt<br />
werden können:<br />
so dass sich aus Gl. (45) ergibt:<br />
i s (t) = 1 2<br />
i ZF = 1 2<br />
[<br />
IS exp(j! 1 t) + c:c: ] ; (46)<br />
[<br />
IZF exp(j(! 1 ! 0 )t) + c:c: ] ; (47)<br />
I S = (U S ¡ Y 0 + U ZF ¡ Y 1 ) (48)<br />
I ZF = (U ZF ¡ Y 0 + U S ¡ Y £ 1 ) (49)<br />
Gl. (48) und (49) lassen sich in Matrix-Schreibweise formulieren:<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⎝ I S ⎠ = ⎝ Y 0 Y 1<br />
⎠ ⎝ U S ⎠ (50)<br />
I ZF Y 0 U ZF<br />
Y £ 1<br />
Gl. (50) entspricht formal der Beschreibung mit y-Parametern gemäÿ Abb. 13. Das Netzwerk entsprechend<br />
Abb. 12 und 13 ist ja auch ein lineares Netzwerk, aber es ist nicht zeitinvariant, weshalb<br />
die Zeiger I S , U S bzw. I ZF , U ZF auf jeweils unterschiedliche Frequenzen bezogen sind.<br />
I S<br />
U S<br />
(Y )<br />
I ZF<br />
U ZF<br />
Abb. 13: Mischer als lineares Umsetzungsnetzwerk.<br />
Interessant ist nun der maximal erreichbare Konversionswirkungsgrad von der Signalfrequenz ! 1 zu<br />
der Zwischenfrequenz ! ZF = ! 1 ! 0 . Dazu kann die aus den y-Parametern bekannte maximale<br />
Leistungsverstärkung Gm 0 herangezogen werden. Aus Gl. (RÜ 27) mit Gl. (RÜ 26) folgt:<br />
G 0 jy<br />
m = 21<br />
j 2<br />
(51)<br />
2
Hochfrequenztechnik II Mischer MI/14<br />
Die maximale Leistungsverstärkung Gm 0 nähert sich 1 für Y 1<br />
Y 0<br />
! 1, was für ^U 0<br />
U T<br />
! 1 erreicht wird. Für<br />
ein noch realistisches ^U 0<br />
U<br />
= 10<br />
T<br />
ergibt sich beispielsweise ein Gm 0 = 0; 5 ( 3 dB), was trotz der hier<br />
durchgeführten Näherungen (ideale Spannungseinprägung) ein realistisches Ergebnis darstellt.<br />
Dieses maximale<br />
√<br />
Gm 0 wird erreicht, wenn sowohl auf der Signal- als auch auf der ZF-Seite an den<br />
Leitwert Y = Y 2 Y 2<br />
0 1<br />
angepasst wird.<br />
Die Rauschzahl eines derartigen realistischen Mischers ist ähnlich wie bei einem passiven Netzwerk<br />
F 1<br />
Gm<br />
0 ; (54)<br />
wenn G 0 m die verfügbare Konversionsezienz des Mischers (G m < 1) bezeichnet.<br />
5 Gegentaktmischer<br />
Der Nachteil des Mischers mit Schottky-Dioden, wie wir ihn in Abschnitt 4 diskutiert haben, besteht<br />
darin, dass neben dem gewünschten Produkt<br />
[u s (t) + u ZF (t)] ¡ g(t)<br />
mit g(t) = df<br />
du j u 0 (t) in Gl. (39) mit dem Term f (u 0 (t)) noch die Harmonischen von ! 0 erscheinen. Zur<br />
Vermeidung dieses Terms werden Schottky-Dioden-Mischer häug als sogenannte Gegentaktmischer<br />
aufgebaut.<br />
Das Prinzip eines Gegentaktmischers zeigt Abb. 14.<br />
Abb. 14: Prinzip eines Gegentaktmischers mit u 1 (t) = u 0 (t)+u s (t)+u ZF (t) und u 2 = u 0 (t) u s (t)<br />
u ZF (t).<br />
Wir gehen dabei von zwei gleichen Schottky-Dioden aus, die jeweils mit der Spannung<br />
und<br />
u 1 = u 0 (t) + u s (t) + u ZF (t) (55)<br />
u 2 = u 0 (t) u s (t) u ZF (t) (56)<br />
ausgesteuert werden. Der Dierenzstrom i (t) = i 1 (t) i 2 (t) ergibt sich als<br />
i (t) = f (u 1 (t)) f (u 2 (t))<br />
= 2[u s (t) + u ZF (t)]g(t) (57)<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/15<br />
mit g(t) entsprechend Gl. (40), so das man dann wieder die Multiplikation wie in Gl. (41) erhält.<br />
Ein solcher Mischer lässt sich aufbauen mit einem 3 dB -Koppler,<br />
180 180 -Hybrid oder Magisches T (vergleiche<br />
Hochfrequenztechnik I, Abschn. HS), der z. B. als Ringkoppler (HFT I, Abschn. HS, Abb. 13)<br />
realisiert werden kann. Ein Realisierungsbeispiel zeigt Abb. 15.<br />
Abb. 15: Gegentaktmischer mit Ringkoppler und zwei Schottky-Dioden.<br />
Die Kapazität C in Abb. 15 soll einen Tiefpass repräsentieren, der für das hochfrequente Signal und<br />
den Lokaloszillator einen Kurzschluss und das ZF-Signal einen Leerlauf darstellt. An den Schottky-<br />
Dioden liegt jeweils die Summe bzw. die Dierenz von Lokaloszillator- und Eingangssignal an, während<br />
sich der Strom des ZF-Signals gleichzeitig auf die beiden Schottky-Dioden aufteilt.<br />
6 Ringmischer<br />
Ein Nachteil des oben diskutierten Gegentaktmischers besteht noch darin, dass g(t) immer positiv ist<br />
und damit der Gleichanteil Y 0 von g(t) in Gl. (40) nicht verschwindet. Die führt dazu, dass der Strom<br />
i (t) in Abb. 14 und 15 oder Gl. (41) immer auch Spektralanteile des Eingangssignals mit beinhaltet.<br />
Idealerweise wäre bei g(t) in Gl. (40) Y 0 = 0 und nur Y 1 = Y £ 1 6= 0. Um einem solchen idealen<br />
Verhalten näher zu kommen, verwendet man einen sogenannten Ringmischer, wie er in Abb. 16<br />
schematisch dargestellt ist.<br />
Für u 0 (t) > 0 werden die Dioden D 2 und D 4 leitend (im Idealfall Kurzschluss), während D 1 und D 3<br />
sperren (im Idealfall Leerlauf). Für u 0 (t) < 0 drehen sich die Verhältnisse um.<br />
Dann lässt sich idealerweise schreiben:<br />
u ZF = u s (t) ¡ s(t) (58)<br />
mit der Schaltfunktion<br />
⎧<br />
⎪⎨<br />
s(t) =<br />
⎪⎩<br />
+1 für u 0 (t) > 0<br />
1 für u 0 (t) < 0<br />
(59)<br />
Diese Multiplikation in Gl. (58) kommt der idealen Multiplikation für einen Mischer in Gl. (3) sehr<br />
nahe und ist auch einmal in Abb. 17 skizziert.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/16<br />
ZF<br />
Abb. 16: Prinzip eines Ringmischers bzw. Ringmodulators.<br />
s(t)<br />
+1<br />
u ZF (t)<br />
u s (t)<br />
−1<br />
Abb. 17: Schematische Darstellung der Multiplikation von u s (t) mit s(t) bei einem Ringmischer.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/17<br />
Das Prinzip eines Ringmischers ist nicht auf die Realisierung mit Dioden beschränkt. Eine Realisierung<br />
mit Feldeekttransistoren führt auf den sogenannten Gilbert-Mischer in Abb. 18. Das (dierentielle)<br />
Eingangssignal wird dabei zwischen den Anschlüssen RF und RF + angelegt, während das<br />
ZF-Ausgangssignal sich als dierentielles Ausgangssignal zwischen den Knoten 1 und 2 ergibt. Der<br />
Lokaloszillator wird zwischen LO und LO + angeschlossen.<br />
–<br />
Abb. 18: Prinzip eines Gilbert-Mischers.<br />
Die Äquivalenz zu einem Ringmischer wird deutlich, wenn man Abb. 18 etwas umzeichnet, woraus sich<br />
Abb. 19 ergibt.<br />
Zwischen-<br />
Frequenz-<br />
Ausgang<br />
Eingangssignal<br />
Abb. 19: Gilbert-Mischer, dargestellt in Form eines Ringes.<br />
7 Parametrische Frequenzumsetzung mit gesteuerter Kapazität<br />
Wir haben oben die Mischung mit einem steuerbaren Leitwert g(t) diskutiert. Es stellt sich hier die<br />
Frage, ob nicht auch die Mischung mit einer steuerbaren Kapazität c(t) möglich wäre. Auf den esten<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Mischer MI/18<br />
Blick hätte eine gesteuerte Kapazität den Vorteil, dass keine Verluste entstehen.<br />
Allgemein lässt sich eine nichtlineare Kapazität durch eine nichtlineare Beziehung zwischen der Ladung<br />
q(t) und der Spannung u(t) entsprechend<br />
q(t) = h[u(t)] (60)<br />
beschreiben, woraus sich die dierentielle Kapazität<br />
dq<br />
c(t) = du<br />
∣<br />
u0 (t)<br />
(61)<br />
ergibt, wobei die nichtlineare Kapazität durch die Lokaloszillator-Spannung u 0 (t) ausgesteuert wird.<br />
c(t) lässt sich dann wie in Gl. (40) als Fourier-Reihe schreiben:<br />
c(t) =<br />
m=+1<br />
∑<br />
m= 1<br />
C m exp(jm! 0 t) (62)<br />
mit reellem C 0 = C 0 und C m = C£ m. In Abb. 12 lässt sich dann g(t) durch c(t) und der Strom i (t)<br />
durch die Ladung q(t) ersetzen, woraus dann statt Gl. (41) für q(t) folgt:<br />
q(t) = [u s (t) + u ZF (t)]c(t) (63)<br />
Statt für den Strom schreiben wir jetzt für die Ladung bei dem Eingangs- bzw. Zwischenfrequenzsignal<br />
(vgl. Gl. (46), (47))<br />
q s (t) = 1 2 [Q S exp(j! 1t) + c:c:] (64)<br />
q ZF (t) = 1 2 [Q ZF exp(j(! 0 ! 1 )t) + c:c:]; (65)<br />
woraus sich dann wie in Gl. (50) in Matrix-Schreibweise ergibt:<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⎝ Q S ⎠ = ⎝ C 0 C 1<br />
⎠ ⎝ U S ⎠ : (66)<br />
Q ZF<br />
C 0 U ZF<br />
C £ 1<br />
Wenn man jetzt versucht, den Konversionswirkungsgrad zu ermitteln, muss man von der Ladung q(t)<br />
zum Strom i (t) = dq(t)<br />
dt<br />
übergehen, woraus<br />
I S = j! 1 Q S<br />
und I ZF = j! ZF Q ZF<br />
(67)<br />
folgt. Hier wird das Problem eines Abwärtsmischers mit gesteuerter Kapazität deutlich: Für ! ZF ! 1<br />
ergeben sich bei der Zwischenfrequenz sehr kleine Ströme (und damit auch sehr kleine Leistungen),<br />
so dass ein Abwärtsmischer mit gesteuerter Kapazität nicht vernünftig realisiert werden kann. Anders<br />
verhält es sich jedoch bei einem Aufwärtsmischer (! ZF ! 1 ); hier ist sogar eine Verstärkung möglich<br />
(parametrische Verstärkung).<br />
Für gesteuerte Kapazitäten gibt es allgemeine Gesetzmäÿigkeiten für die Leistungsbeziehungen (Manley-<br />
Rowe-Gleichungen), die hier aber nicht weiter diskutiert werden sollen.<br />
<strong>TU</strong> <strong>Berlin</strong> Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/1<br />
1 Analoge und digitale Signale<br />
Modulationsverfahren werden benötigt, um ein vorhandenes Basisbandsignal s(t) über ein hochfrequentes<br />
Trägersignal zu übertragen. Dieses Signal kann vorliegen als analoges Signal s(t) mit der<br />
Bandbreite ∆f . Wir sprechen dann auch von einem zeit- und wert-kontinuierlichem Signal. s(t) kann<br />
aber auch vorliegen als ein wert- und zeit-diskretes Signal, wobei wir dann von einem digitalen Signal<br />
s(t) sprechen.<br />
1.1 Digitale Signale<br />
Zur Gewinnung dieses digitalen Signales wird das Ursprungssignal mit einer festen Abtastrate f B abgetastet,<br />
und nur die Signalwerte zu diesen festen Abtastzeitpunkten werden übertragen (zeitdiskrete<br />
Übertragung). Das analoge Ursprungssignal ist ohne jeglichen Verlust aus den zeitdiskreten Abtastwerten<br />
wieder gewinnbar, wenn für die Abtastrate<br />
f B > 2∆f a (1)<br />
gilt (mit der Bandbreite ∆f a des analogen Ursprungssignals). Bei einem digitalen Signal werden diese<br />
einzelnen Abtastwerte quantisiert übertragen. (wertdiskrete Übertragung), z. B. mit 2 n Quantisierungsstufen,<br />
wobei n die Anzahl der „bits” pro Abtastzeitpunkt beschreibt. Die benötigte Bitrate für<br />
das digitale Signal ist dann durch<br />
gegeben.<br />
Beispiel:<br />
B = n · f B > 2n · ∆f a (2)<br />
Wenn man von einem analogen Ursprungssignal mit ∆f = 5 MHz Bandbreite ausgeht, das<br />
mit n = 8, also 2 n = 256 Quantisierungsstufen, übertragen werden soll, benötigt man eine<br />
Bitrate von mindestens<br />
B > 2 · 8 · 5 Mbit<br />
s<br />
= 80 Mbit<br />
s<br />
Bei z. B. einem Videosignal lässt sich die Datenrate jedoch mit entsprechender Quellenkodierung,<br />
z. B. MPEG, erheblich reduzieren.<br />
Wenn ein digitales Signal mit der Bitrate B als binäres NRZ-Signal (NRZ – non-return-to-zero)<br />
übertragen werden soll, muss der Übertragungskanal die Bandbreite<br />
∆f = B 2<br />
(3)<br />
bereitstellen, wie am Beispiel von Abb. 1 deutlich wird.<br />
Man kann das NRZ-Signal in Abb. 1 auffassen als die Übertragung von B Symbolen pro Sekunde,<br />
wobei jedes Symbol die Information von „1 bit” beinhaltet. Pro Symbol können in höherwertigen<br />
Modulationsverfahren auch mehr Informationen übertragen werden, z. B. m-bits (d. h. z. B. pro Symbol<br />
2 m diskrete Amplitudenwerte), so dass sich dann die Symbolrate S zu<br />
S = B m<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/2<br />
s(t)<br />
1 0 1 0 1 0 1 0 1 0 1 0 0 1 0 1 1 1 0 0 1 0 1<br />
max. Frequenzkomponente B 2<br />
Abb. 1: Binäres NRZ-Signal und die darin enthaltene maximale Frequenzkomponente B 2 .<br />
t<br />
ergibt, und die erforderliche Bandbreite für dieses mehrstufige digitale Signal ist dann entsprechend zu<br />
Gl. (3) als<br />
gegeben.<br />
∆f = S 2 = B<br />
2m<br />
(4)<br />
2 Trägermodulationsverfahren<br />
Das eben diskutierte Signal s(t) soll nun mit einer Trägerfrequenz f T (bzw. ω T = 2π · f T ) in der<br />
Hochfrequenz-Ebene übertragen werden. Das hochfrequente modulierte Signal u M (t) kann dann geschrieben<br />
werden als:<br />
u M (t) = Û M (t) cos[ω T t + ϕ(t)] = R[u(t) exp(jω T t)] (5)<br />
mit dem komplexen (jetzt zeitabhängigen) Zeiger u(t)<br />
u(t) = Û M (t) exp[jϕ(t)]. (6)<br />
Wir wollen ein reelles Eingangssignal s(t) mit |s(t)| ≤ 1 voraussetzen, wobei der Zeiger u(t) dem<br />
Eingangssignal s(t) in geeigneter Weise folgt. s(t) kann dabei sowohl als analoges als auch als digitales<br />
Signal vorliegen.<br />
Wie Gl. (6) zeigt, kann man u(t) bezüglich der Amplitude, der Phase oder der Frequenz modulieren.<br />
Wir wollen im Folgenden diese verschiedenen Modulationsarten diskutieren.<br />
Amplitudenmodulation: Bei einer reinen Amplitudenmodulation wird in Gl. (6) nur die Amplitude<br />
Û M (t) moduliert und die Phase ϕ(t) bleibt konstant (z. B. ϕ(t) = 0). Der zeitabhängige Zeiger<br />
u(t) ist dann rein reell, und es gilt<br />
u(t) = Û M0 [1 + m · s(t)] (7)<br />
mit der mittleren Amplitude Û M0 und dem Modulationsindex m mit m ≤ 1. Durch die Bedingung<br />
(m ≤ 1) wird sicher gestellt, dass die Amplitude immer positiv reell bleibt.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/3<br />
Im Einzelnen sprechen wir von<br />
s(t) analog ⇒ AM (Amplitudenmodulation)<br />
s(t) digital ⇒ ASK (amplitude-shift keying – Amplitudenumtastung)<br />
Phasen- und Frequenzmodulation (Winkelmodulation):<br />
Alternativ zur Amplitude lässt sich auch<br />
die Phase oder Frequenz des Trägersignals modulieren. Die Amplitude ist dann konstant Û M (t) =<br />
Û M0 , und der Zeiger<br />
u(t) = Û M0 exp[jϕ(t)] (8)<br />
beinhaltet dann die modulierte Phase ϕ(t). Bei einer Phasenmodulation gilt<br />
mit dem Phasenhub ∆ϕ.<br />
Wir sprechen dann von<br />
s(t) analog ⇒ PM (Phasenmodulation)<br />
ϕ(t) = ∆ϕ · s(t) (9)<br />
s(t) digital ⇒ PSK (phase-shift keying – Phasenumtastung)<br />
Alternativ zur Phase können wir auch die Frequenz modulieren. Bei einer Frequenzmodulation<br />
führen wir zunächst die modulierte Frequenz f (t)<br />
ein, wobei f (t) dem Signal s(t) gemäß<br />
f (t) = 1 dϕ<br />
2π dt<br />
mit dem Frequenzhub ∆f T folgt. Wir sprechen dann von<br />
s(t) analog ⇒ FM (Frequenzmodulation)<br />
(10)<br />
f (t) = ∆f T · s(t) (11)<br />
s(t) digital ⇒ FSK (frequency-shift keying – Frequenzumtastung)<br />
2.1 Amplitudenmodulation<br />
Bei einem Zeiger u(t) gemäß Gl. (7) (d. h. u(t) positiv reell), folgt aus Gl. (5) für das modulierte<br />
Signal u M (t):<br />
d. h.<br />
u M (t) = Û M0 [1 + m · s(t)] cos(ω T t), (12)<br />
u M (t) = Û M0 cos(ω T t) + Û<br />
} {{ } M0 · m · s(t) cos(ω T t)<br />
} {{ }<br />
Träger<br />
Seitenbänder<br />
Das modulierte Signal besteht damit aus einem Träger sowie den Seitenbändern, die die Information<br />
s(t) beinhalten. Wenn wir die Fouriertransformierte von s(t)<br />
(13)<br />
s(t) ❞ S(jω) (14)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/4<br />
einführen, ergibt sich als Foueriertransformierte von u M (t):<br />
u M (t) ❞ Û M0 {π[δ(ω − ω T ) + δ(ω + ω T )] + m } {{ } 2 [S(j(ω − ω T )) + S(j(ω + ω T ))]} (15)<br />
} {{ }<br />
Träger<br />
Seitenbänder<br />
mit der Dirac-Funktion δ(x).<br />
Das Spektrum von Gl. (15) ist in Abb. 2 skizziert (für f > 0).<br />
Träger<br />
S(j(ω − ω T ))<br />
f =0<br />
f T<br />
2∆f<br />
f = ω 2π<br />
Abb. 2: Spektrum eines amplitudenmodulierten Signals (dargestellt ist nur die positive Frequenzachse).<br />
Wenn das Ursprungssignal s(t) eine Bandbreite ∆f<br />
Hochfrequenz-Ebene die doppelte Bandbreite 2∆f für das modulierte Signal.<br />
aufweist, benötigt man nach Abb. 2 in der<br />
Ein weiterer Nachteil der normalen Amplitudenmodulation besteht darin, dass im Träger ein erheblicher<br />
Leistungsanteil steckt.<br />
Um dies zu illustrieren, nehmen wir ein harmonisches Basisbandsignal<br />
an, woraus sich ein u M (t) gemäßt Gl. (13) von<br />
s(t) = cos(ω 1 t) (16)<br />
u M (t) = Û M0 cos(ω T t) + Û M0 m cos(ω 1 t) cos(ω T t) (17)<br />
ergibt. Die mittlere Leistung von u M (t) lässt sich dann angeben als<br />
⎛<br />
P ∝ u 2 M (t) = Û2 M0<br />
2<br />
⎞<br />
⎜<br />
⎝ }{{} 1 m 2<br />
+ ⎟<br />
2 ⎠<br />
Träger }{{}<br />
Seitenbänder<br />
Beispiel: Wenn wir einen Mittelwellen-AM-Sender mit einer Leistung von 500 kW und m = 0, 7<br />
annehmen, werden 400 kW im Träger und nur 100 kW in den Seitenbändern übertragen.<br />
Die normale Amplitudenmodulation (AM) ist deshalb eigentlich unwirtschaftlich. Ein sehr hoher Leistungsanteil<br />
wird nur für die Übertragung des Trägers verwendet (ohne Informationsanteil) und die<br />
Seitenbänder, die die eigentliche Information beinhalten, haben nur einen relativ kleinen Leistungsanteil.<br />
Weiterhin ist die benötigte Bandbreite doppelt so groß wie die Basisbandbreite.<br />
Trotzdem wird die AM noch viel verwendet im analogen Rundfunk im Bereich der LW (Langwelle),<br />
MW (Mittelwelle) und KW (Kurzwelle). Der Grund dafür liegt in der Verwendung sehr einfacher<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/5<br />
Rundfunkempfänger, bei denen aus dem hochfrequenten Signal u M (t) das Basisbandsignal mit |Û M (t)|<br />
durch lineare Hochfrequenzgleichrichtung (vgl. Abschnitt MI) gewonnen wird.<br />
Eine leichte Verbesserung bezüglich der übertragenen Trägerleistung lässt sich mit der dynamischen<br />
Amplituden-Modulation (DAM) erreichen, bei der die Trägerleistung bei geringerem Modulationsindex<br />
m herabgesetzt wird.<br />
2.1.1 Trägerlose Amplitudenmodulation<br />
Da der Träger keine Information überträgt, braucht er eigentlich auch nicht mit übertragen zu werden.<br />
Statt Gl. (13) erhält man dann<br />
u M (t) = Û M0 · m · s(t) cos(ω T t) (18)<br />
einfach aus der Multiplikation von s(t) mit cos(ω T t), was sich mit einer Mischschaltung (vgl. Abschnitt<br />
MI) einfach realisieren lässt. Das Spektrum der trägerlosen Amplitudenmodulation entspricht genau<br />
Abb. 2 ohne Träger.<br />
Der Nachteil der trägerlosen Amplitudenmodulation besteht darin, dass am Empfänger der Träger, also<br />
ein Signal ∝ cos(ω T t), wieder bereitgestellt werden muss. Dieses kann geschehen mit der Übertragung<br />
eines Träger-Restes (also Träger mit reduzierter Amplitude) und anschließender PLL (Phasenregelkreis,<br />
vgl. Abschnitt PLL).<br />
Mit einem derart im Empfänger wieder erzeugten Träger kann entweder ein Signal entsprechend Gl.<br />
(12) und (13) wieder erzeugt werden. Gl. (18) kann auch mit cos(ω T t) multipliziert und anschließend<br />
tiefpassgefiltert werden, um s(t) zurückzugewinnen.<br />
Der Nachteil der trägerlosen Amplitudenmodulation besteht darin, dass zwei Seitenbänder übertragen<br />
werden und damit wie bei der normalen AM eine Bandbreite von 2∆f benötigt wird.<br />
2.1.2 Einseitenbandmodulation<br />
Da beide Seitenbänder der trägerlosen AM die gleiche Information tragen, genügt es, nur eines der<br />
beiden Seitenbänder zu übertragen. Man spricht dann von der so genannten „Einseitenbandmodulation”<br />
(EM bzw. SSB – single-sideband modulation).<br />
Ein solches Einseitenband-Signal lässt sich z. B. aus einer trägerlosen AM mit anschließender Filterung<br />
gewinnen (siehe Abb. 3).<br />
Filter<br />
f =0<br />
f T<br />
2∆f<br />
f = ω 2π<br />
Abb. 3: Gewinnung eines Einseitenband-Signals aus der trägerlosen Amplitudenmodulation mit anschließender<br />
Filterung.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/6<br />
Alternativ lässt sich ein Einseitenband-Signal auch mit einem so genannten „Quadraturmodulator”<br />
gewinnen, wie schematisch Abb. 4 zeigt.<br />
Abb. 4: Schematische Anordnung zur Gewinnung eines Einseitenband-Signals mit<br />
Quadraturmodulator.<br />
Diese Anordnung besteht aus zwei Multiplikatoren, die zur Multiplikation von cos(ω T t) bzw. sin(ω T t)<br />
mit s(t) bzw. dem um 90 ◦ verschobenen s(t) führen: Bei den beiden Multiplikationen entstehen jeweils<br />
zwei Seitenbänder, wobei bei der anschließenden Addition am Ausgang nur ein Seitenband übrig bleibt.<br />
Die Herausforderung der Realisierung von Abb. 4 besteht darin, über die gesamte Bandbreite von s(t)<br />
eine 90 ◦ -Verschiebung zu gewährleisten (eine 90 ◦ -Phasenverschiebung für alle Spektralkomponenten<br />
von s(t)). Das so erzeugte Signal s H (t) stellt dann die „Hilbert-Transformierte” von s(t) dar.<br />
Im Empfänger lässt sich das Basisbandsignal s(t) wieder gewinnen, indem das Einseitenband-Signal<br />
mit cos(ω T t) multipliziert wird.<br />
2.1.3 Restseitenbandmodulation<br />
Zur korrekten Rückgewinnung des Signals s(t) aus einem Einseitenband-Signal muss im Empfänger das<br />
Trägersignal mit der exakten Phase erzeugt werden. Dazu kann es zweckmäßig sein, einen Restträger<br />
mit zu übertragen. Weiterhin ist es gerade bei sehr breitbandigen Signalen (z. B. Video-Signalen)<br />
schwierig, entweder das Filter in Abb. 3 oder die 90 ◦ -Verschiebung genau so zu realisieren, dass nur<br />
genau ein Seitenband übrig bleibt.<br />
Es kann deshalb sinnvoll sein, neben dem oberen Seitenband auch einen Teil des unteren Seitenbands<br />
mit zu übertragen. Man spricht dann von „Restseitenbandmodulation” (auch VSB – vestigal-sideband<br />
modulation).<br />
Die Restseitenbandmodulation soll am Beispiel des analogen TV-Rundfunks (aktuell noch verwendet<br />
im Kabelfernsehen) erläutert werden.<br />
Im Abb. 5 ist das Restseitenband-modulierte Signal dargestellt, wobei das obere Seitenband (bezüglich<br />
des Bildträgers) vollständig erhalten ist, während das untere Seitenband durch ein Filter beschnitten<br />
ist.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/7<br />
Bildträger<br />
Tonträger<br />
a) −1 0 1 2 3 4 5 6 MHz<br />
Bildträger<br />
Tonträger<br />
f − f T<br />
Nyquist-Flanke<br />
b) −1 0 1 2 3 4 5 6 MHz<br />
Tonträger<br />
f − f T<br />
c) 0 1 2 3 4 5 6 MHz<br />
f<br />
Abb. 5: Resteitenbandmodulation bei der analogen TV-Übertragung: a) Restseitenband-Signal, b) gefiltertes<br />
Restseitenband-Signal (mit Nyquist-Flanke) und c) Basisband-Signal am Mischerausgang.<br />
Dieses Signal aus Abb. 5a) wird durch ein Filter mit der so genannten „Nyquist-Flanke” geschickt, so<br />
dass dann das Spektrum in Abb. 5b) entsteht.<br />
Nach nachfolgender Mischung (Multiplikation mit dem Bildträger der Frequenz f T ) ergibt sich dann<br />
wieder das Basisband-Signal in Abb. 5c).<br />
2.2 Phasen- und Frequenzmodulation (Winkelmodulation)<br />
Bei einer Phasen- bzw. Frequenzmodulation ist der komplexe zeitabhängige Zeiger u(t) gemäß Gl. (8),<br />
also u(t) = Û M0 exp[jϕ(t)] gegeben, wobei entweder ϕ(t) oder dϕ<br />
dt<br />
proportional zum Basisband-Signal<br />
s(t) werden.<br />
Z. B. bei einem frequenzmodulierten Signal gilt mit den Gl. (10) und (11):<br />
dϕ<br />
dt = 2π∆f T · s(t) (19)<br />
bzw. für die Phase<br />
ϕ(t) = 2π∆f T<br />
∫<br />
s(t) dt, (20)<br />
so dass man für das modulierte Signal<br />
u M (t) = R [ u(t) exp(jω T t) ] ∫<br />
= Û M0 cos<br />
[ω T · t + 2π∆f T<br />
]<br />
s(t) dt<br />
(21)<br />
erhält. Die spektralen Eigenschaften von u M (t) lassen sich so nur schwer abschätzen, so das wir uns<br />
im folgenden zunächst auf die Analyse mit einem harmonischen Basisband-Signal beschränken wollen.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/8<br />
2.2.1 Winkelmodulation mit harmonischem Signal s(t)<br />
Wir betrachten ein sinusförmiges s(t):<br />
s(t) = sin(ω 1 t), (22)<br />
so dass sich bei einer Phasenmodulation mit dem Phasenhub ∆ϕ ergibt:<br />
ϕ(t) = ∆ϕ sin(ω 1 t). (23)<br />
Diese Phasenmodulation lässt sich auch als eine Frequenzmodulation auffassen mit der Momentanfrequenz<br />
wobei<br />
f (t) = 1 dϕ<br />
2π dt = ∆ϕ · f 1<br />
} {{ }<br />
· cos(ω 1 t), (24)<br />
∆f T<br />
∆f T = ∆ϕ · f 1 (25)<br />
den Frequenzhub bezeichnet (f 1 = ω 1<br />
2π<br />
). Unter Berücksichtigung des Zusammenhangs zwischen Frequenzhub<br />
und Phasenhub in Gl. (25) sind Frequenz- und Phasenmodulation praktisch äquivalent. Zur<br />
Analyse des Spektrum eines phasen- bzw. frequenzmodulierten Signals genügt es, das Spektrum von<br />
u(t) zu analysieren (Das Spektrum von u M (t) folgt dann durch Verschiebung um ±ω T ).<br />
u(t) ist gegeben als<br />
u(t) = Û M0 exp[jϕ(t)] = Û M0 exp[j∆ϕ sin(ω 1 t)] (26)<br />
u(t) ist damit periodisch mit der Frequenz ω 1 , so dass sich u(t) als Fourierreihe schreiben lässt:<br />
u(t) =<br />
Die Fourierkoeffizienten ergeben sich dann als<br />
mit der Besselfunktion J m (x), die gemäß<br />
J m (x) = 1<br />
2π<br />
+∞ ∑<br />
m=−∞<br />
U m exp(jmω 1 t). (27)<br />
U m = Û M0 J m (∆ϕ) (28)<br />
∫+π<br />
−π<br />
exp(jx sin(y) − jm · y) dy (29)<br />
definiert und in Abb. 6 für m = 0 . . . 5 dargestellt ist. Für negative Ordnungen m gilt J −m (x) =<br />
(−1) m J m (x).<br />
Gl. (27) besitzt unendlich viele Spektralkomponenten, so dass eigentlich zur Übertragung eines phasenbzw.<br />
frequenzmodulierten Signals eine unendlich große Bandbreite erforderlich ist.<br />
Beispielsweise zeigt Abb. 7 die Spektrallinien (ˆ=U m ) bei einer Phasenmodulation mit ∆ϕ = 5.<br />
Bei sehr hohen Ordnungen m werden die Spektrallinien immer kleiner, so dass sehr hohe Ordnungen<br />
vernachlässigt werden können. Eine gute Näherung besteht darin, alle Spektralkomponenten mit zu<br />
berücksichtigen, bei denen |J m (∆ϕ)| ≥ 0, 1 gilt, so dass sich dann die benötigte Bandbreite ∆f m zu<br />
∆f m ≈ 2f 1 (∆ϕ + 1) (30)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/9<br />
J m<br />
J 0<br />
J 1<br />
J 2<br />
.<br />
J 3<br />
.<br />
J 4<br />
.<br />
J 5<br />
.<br />
Abb. 6: Besselfunktionen J m (x) der Ordnungen m = 0 . . . 5.<br />
x<br />
U m<br />
Û M0<br />
0, 1<br />
−0, 1<br />
−6 −4 −2 2 4 6<br />
m<br />
∆f m<br />
Abb. 7: Die Komponenten U m der Fourierreihe führen zu Spektralkomponenten von u(t) bei m · ω 1<br />
und von u M (t) bei (ω T + m · ω 1 ) und (−ω T − m · ω 1 ). Annahme: Phasenhub ∆ϕ = 5.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/10<br />
ergibt, was im Beispiel von Abb. 7 (∆ϕ = 5) einem ∆f m = 12f 1 entspricht, so dass dort alle Ordnungen<br />
|m| ≤ 6 berücksichtigt werden. Bei einer Frequenzmodulation mit dem Zusammenhang zwischen<br />
Phasen- und Frequenzhub gemäß Gl. (25) führt Gl. (30) auf<br />
∆f m ≈ 2(f 1 + ∆f T ). (31)<br />
Eine Frequenzmodulation ist einfach möglich mit einem spannungsgesteuerten Oszillator, und die<br />
Demodulation kann einfach mit einer PLL (vgl. Abschnitt PLL) erfolgen.<br />
Beispiel: FM-Rundfunk; hier gilt für die maximale Modulationsfrequenz f 1 ≈ 15 kHz, der Frequenzhub<br />
ist ∆f T = 75 kHz, woraus sich eine HF-Bandbreite von ∆f m = 180 kHz ergibt.<br />
3 Bewertung analoger Modulationsverfahren<br />
Für die Bewertung der Modulationsverfahren ist bei gegebener Basisbandbreite ∆f einmal die benötigte<br />
Hochfrequenzbandbreite ∆f m von Interesse. Weiterhin ist von Interesse, welches Signal/Rausch-<br />
Verhältnis im Basisband nach der Demodulation bei einem gegebenen Signal/Rausch-Verhältnis in der<br />
Hochfrequenz-Ebene erreicht werden kann.<br />
S HF ,W HF<br />
> Demodulator<br />
S<br />
N ∣<br />
HF<br />
S NF ,W NF<br />
S<br />
∣<br />
N<br />
∣<br />
NF<br />
Abb. 8: Empfänger mit Demodulator.<br />
Dieser Zusammenhang soll mit Hilfe von Abb. 8 erläutert werden. Wir haben zunächst auf der<br />
Hochfrequenz-Ebene eine Signalleistung S HF und eine spektrale Rauschleistungsdichte W HF vorliegen,<br />
so dass wir mit der Hochfrequenzbandbreite ∆f m auf der Hochfrequenzseite ein Signal/Rausch-<br />
Verhältnis von<br />
S<br />
N<br />
=<br />
∣ HF<br />
S HF<br />
W HF · ∆f m<br />
(32)<br />
erhalten. Nach der Demodulation ergibt sich auf der Niederfrequenzseite<br />
S<br />
N<br />
=<br />
S NF<br />
∣ W NF · ∆f , (33)<br />
NF<br />
und man kann nun für die verschiedenen Modulationsverfahren einen Störabstands-Verbesserungs-<br />
Faktor einführen, der die Signal/Rausch-Verhältnisse auf der Hochfrequenz- und Niederfrequenz-Ebene<br />
zueinander in Beziehung setzt. Wir wollen hier einen modifizierten Verbesserungsfaktor V gemäß<br />
V = S S<br />
NF /W NF N ∣<br />
= NF<br />
∆f<br />
S HF /W HF<br />
S ∣<br />
(34)<br />
∆f m<br />
N ∣ HF<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/11<br />
einführen, der die Signalleistungen mit den jeweiligen spektralen Rauschleistungsdichten verknüpft.<br />
Zur Analyse gehen wir vereinfachend von einem harmonischen Basisband-Signal s(t) = sin(ω 1 t) aus:<br />
Als Referenz dient die Einseitenbandmodulation, bei der trivialerweise mit V = V EM<br />
V EM = 1 (35)<br />
gilt, da bei der Einseitenbandmodulation das Spektrum nur verschoben wird. In diesem Sinn gibt V<br />
gerade den Faktor an, um den sich bei gegebener Hochfrequenzleistung S HF das Signal/Rausch-<br />
Verhältnis nach dem Demodulator verbessert. Für die Amplitudenmodulation gilt<br />
V AM = m2 /2<br />
, (36)<br />
1 + m2<br />
2<br />
und damit V AM < 1, was im Wesentlichen daran liegt, dass ein hoher Anteil der Hochfrequenzleistung<br />
für die Übertragung des Trägers aufgebracht werden muss. Beim Vergleich mit Gl. (17) entspricht<br />
V AM gerade dem Leistungsanteil in den Seitenbändern im Vergleich zur Gesamtleistung. Bei Phasenmodulation<br />
gilt (ohne Beweis)<br />
V P M = ∆ϕ2<br />
2 . (37)<br />
Für kleine Phasenhübe ∆ϕ ≪ 1 verhält sich eine Phasenmodulation genau so wie eine Amplitudenmodulation<br />
mit m = ∆ϕ.<br />
Bei einer Frequenzmodulation ist zu berücksichtigen, dass der Phasenhub ∆ϕ bei gegebenem Frequenzhub<br />
∆f T gemäß Gl. (25) von der Modulationsfrequenz f 1 abhängt. Wenn man über alle Modulationsfrequenzen<br />
innerhalb der Bandbreite ∆f mittelt, ergibt sich aus Gl. (37) mit ∆ϕ = ∆f T /f 1 aus<br />
Gl. (25)<br />
zu<br />
1<br />
= 1<br />
V F M ∆f<br />
∫∆f<br />
0<br />
1<br />
V P M (f 1 ) df 1 = 1<br />
∆f<br />
V F M = 3 2<br />
∫∆f<br />
0<br />
(<br />
∆fT<br />
∆f<br />
2<br />
∆ϕ 2 df 1 = 1<br />
∆f<br />
∫∆f<br />
0<br />
2f 2<br />
1<br />
∆f 2 T<br />
df 1 (38)<br />
) 2<br />
. (39)<br />
Für das oben angegebene Beispiel des FM-Rundfunks ergibt sich mit ∆f T = 75 kHz und ∆f = 15 kHz<br />
ein V F M = 37, 5 ( ˆ=15, 7 dB). Dies bedeutet bei gegebener Hochfrequenzleistung ein um den Faktor<br />
37, 5 höheres erreichbares Signal/Rausch-Verhältnis im Basisband als bei Einseitenbandmodulation.<br />
Für diese Erhöhung des Signal/Rausch-Leistungs-Verhältnisses muss man aber mit der erhöhten<br />
Hochfrequenzbandbreite ∆f m gemäß Gl. (31) bezahlen.<br />
Die Erzielung des Verbessungsfaktors gemäß Gl. (37) und (39) bei Phasen- bzw. Frequenzmodulation<br />
setzt allerdings voraus, dass das Signal/Rausch-Leistungs-Verhältnis auf der Hochfrequenzseite<br />
S<br />
∣ ≥ 1 ist. Man spricht dabei von der so genannten „FM-Schwelle”. Oberhalb dieser FM-Schwelle<br />
HF<br />
N<br />
sind sogar noch höhere Verbesserungsfaktoren als in Gl. (39) möglich, wenn die höheren Modulationsfrequenzen<br />
bei der Modulation angehoben werden und bei der Demodulation wieder abgesenkt werden<br />
(Präemphase/Deemphase).<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/12<br />
4 Digitale Modulationsverfahren<br />
Auch bei den bisher diskutierten Modulationsverfahren kann das Basisband-Signal s(t) sowohl analoger<br />
als auch digitaler Natur sein. Für digitale Modulationsverfahren sind aber insbesondere PSK,<br />
QAM (Quadratur-Amplituden-Modulation) und OFDM (orthogonal frequency-division multiplex) von<br />
Interesse.<br />
4.1 Phasenumtastung (PSK)<br />
Wir gehen wieder vom modulierten Signal entsprechend Gl. (5) mit dem komplexen Zeiger u(t) aus.<br />
Bei einer reinen Phasenumtastung bleibt die Amplitude |u(t)| konstant, und nur die Phase ändert sich,<br />
so dass sich bei binärer PSK in der komplexen Ebene ein u(t) wie in Abb. 9 ergibt.<br />
I(u)<br />
−Û M0<br />
Û M0<br />
0 1<br />
R(u)<br />
Abb. 9: Binäre Phasenumtastung (PSK).<br />
Der Zeiger u(t) ist dabei u(t) = Û M0 exp(j · 0) für die „1” und u(t) = Û M0 exp(j · π) für die „0”.<br />
Diese binäre Phasenumtastung entspricht praktisch einer trägerlosen Amplitudenmodulation (bzw.<br />
-umtastung), da u(t) zwischen u(t) = Û M0 und u(t) = −Û M0 umgestastet wird.<br />
Es entstehen wie bei der normalen trägerlosen Amplitudenmodulation zwei Seitenbänder, die die gleiche<br />
Information tragen. Weiterhin ist wegen der binären Modulation die Symbolrate (in Baud oder Bd)<br />
gleich der Bitrate.<br />
Um mehr Informationen pro Symbol zu übertragen, kann man auch pro Symbol eine Quantisierung in<br />
mehr Phasenzustände vornehmen. Ein Beipiel dafür ist die quaternäre Phasenumtastung (QPSK) in<br />
Abb. 10. Pro Symbol können hier vier unterschiedliche Phasen und damit 2 bit übertragen werden.<br />
Die Bitrate wird damit doppelt so groß wie die Symbolrate.<br />
Sowohl R[u(t)] als auch I[u(t)] besitzen jeweils zwei Zustände, mit denen sich das modulierte Signal<br />
u M (t) in Gl. (5) schreiben lässt:<br />
u M (t) = R[u(t) exp(jω T t)]<br />
= R[u(t)] cos(ω T t) − I[u(t)] sin(ω T t) (40)<br />
Das Signal in Gl. (40) lässt sich einfach mit einem Quadraturmodulator (vgl. Abb. 4) erzeugen, wie<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/13<br />
I(u)<br />
01<br />
11<br />
R(u)<br />
00<br />
10<br />
Abb. 10: Quaternäre Phasenumtastung (QPSK).<br />
Abb. 11 zeigt. Bei der QPSK sind sowohl R[u(t)] als auch I[u(t)] binäre Signale, aus denen schließlich<br />
das quaternäre modulierte Signal u M (t) erzeugt wird.<br />
Abb. 11: Quadraturmodulator zur Gewinnung von QPSK- oder QAM-Signalen.<br />
Auch bei der QPSK ist wie bei der binären PSK der Träger unterdrückt. 1 Allerdings enthalten das<br />
obere und untere Seitenband der QPSK unterschiedliche Informationen.<br />
4.2 Quadratur-Amplitudenmodulation (QAM)<br />
Um pro Symbol noch mehr Zustände übertragen zu können, ist es zweckmäßig, sowohl die Amplitude<br />
als auch die Phase zu variieren, und man gelangt so beispielsweise zur Quadratur-Amplitudenmodulation<br />
(QAM). Das Konstellationsdiagramm einer 16-QAM zeigt Abb. 12. Sowohl der R[u(t)] als auch der<br />
I[u(t)] weisen vier Zustände auf, und das modulierte Signal kann dann wieder wie in Abb. 11 erzeugt<br />
1 Dies gilt zumindest, wenn alle Zustände gleich wahrscheinlich sind.<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/14<br />
werden.<br />
I(u)<br />
R(u)<br />
Abb. 12: Konstellationsdiagramm einer 16-QAM (Quadratur-Amplitudenmodulation).<br />
Bei einer 16-QAM werden pro Symbol 4 bit übertragen, so dass die Bitrate viermal so groß wie die<br />
Symbolrate wird.<br />
Mit zunehmender Anzahl verschiedener Zustände pro Symbol steigt zwar bei gegebener Symbolrate<br />
(und damit gegebener Hochfrequenzbandbreite) die Bitrate an, aber auch die Anforderungen an das<br />
Signal-Rauschleistungs-Verhältnis ( S N ) steigen.<br />
Modulationsverfahren binäre PSK QPSK 16-QAM 64-QAM<br />
benötigtes S N<br />
9 dB 12 dB 19 dB 25 dB<br />
Tabelle 1: Erforderliches S N<br />
bei unterschiedlichen Modulationsverfahren für eine Fehlerhäufigkeit von<br />
10 −4 (Meinke,Gundlach, Taschenbuch der Hochfrequenztechnik, Springer 1992, S. O 28).<br />
4.3 OFDM (orthogonal frequency-division multiplex)<br />
In der terrestrischen Funkübertragung gibt es häufig das Problem der so genannten „Mehrwegeausbreitung”,<br />
wie schematisch Abb. 13 zeigt.<br />
Zwischen Sender und Empfänger gibt es beispielsweise einen direkten Pfad mit der Laufzeit τ und<br />
einen weiteren Signalweg der Laufzeit τ + ∆τ, so dass sich dann eine Impulsantwort der Länge ∆τ<br />
ergibt. Für eine eindeutige Übertragung mit geringem Symbolnebensprechen ist es dann zweckmäßig,<br />
ein Modulationsverfahren mit einer Symboldauer T S größer als ∆τ bzw. einer Symbolrate kleiner als<br />
1<br />
∆τ<br />
zu verwenden.<br />
Um bei geringen Symbolraten trotzdem hohe Datenraten zu übertragen, wird häufig die so genannte<br />
„orthogonal frequency-division multiplex” (OFDM)-Modulation angewandt. Dazu wird das modulierte<br />
Signal in sehr viele (z. B. > 1000) Hochfrequenz-Subträger aufgeteilt, die dann jeder für sich mit<br />
QPSK oder QAM geringerer Daten- bzw. Symbolrate moduliert werden.<br />
Das modulierte Signal u M (t) lässt sich dann wieder ähnlich wie in Gl. (5) mit u(t) darstellen:<br />
u M (t) = R[u(t) exp(jω T t)], (41)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/15<br />
Sendeantenne<br />
τ<br />
τ + ∆τ<br />
Empfangsantenne<br />
Abb. 13: Problem der Mehrwegeausbreitung: Das Signal erreicht den Empfänger auf unterschiedlichen<br />
Wegen und damit zu verschiedenen Zeitpunkten.<br />
wobei sich<br />
u(t) =<br />
N−1 ∑<br />
n=0<br />
U n exp(j2π · n · δf · t) (42)<br />
aus N Subträgern der jeweiligen Frequenzen n · δf zusammensetzt. U n ist z. B. entsprechend einer<br />
QAM kodiert und bleibt jeweils für eine Symboldauer T S = 1<br />
δf<br />
konstant. Das Spektrum eines solchen<br />
OFDM-Signals ist in Abb. 14 skizziert.<br />
δf<br />
f T + n · δf<br />
. . . . . .<br />
f T = ω T<br />
2π<br />
f n = N · δf<br />
f<br />
Abb. 14: Schematische Darstellung eines OFDM-Spektrums.<br />
Das gesamte Spektrum das OFDM-Signals hat eine Breite von N · δf = f n . Die Übertragung dieses<br />
Signals u(t) erfolgt dann zeitdiskret (t = i · ∆t mit Zeitintervallen ∆t = 1 f n<br />
= 1<br />
N·δf<br />
= T S<br />
N<br />
).<br />
Für t = i · ∆t stellt Gl. (42) eine diskrete Fouriertransformation zwischen U n und u(i · ∆t) dar, so dass<br />
sich u(t) und damit das modulierte Signal u M (t) durch eine inverse FFT (fast Fourier transform) und<br />
eine Quadratur-Amplitudenmodulation leicht gewinnen lässt, wie Abb. 15 zeigt (vgl. auch Abb. 11).<br />
Am Empfänger können die Daten U 0 . . . U N−1 wieder durch eine Fouriertransformation gewonnen<br />
werden.<br />
In der obigen vereinfachten Betrachtung sind wir von einer Symbolrate von 1<br />
T S<br />
= δf ausgegangen.<br />
Tatsächlich ist die praktisch übertragene Symbolrate etwas geringer, da zwischen den Symbolen noch<br />
Schutzintervalle eingeführt werden. Für das Beispiel der Mehrwegeausbreitung in Abb. 13 sollte das<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Modulationsverfahren MOD/16<br />
Abb. 15: Prinzip der Gewinnung eines OFDM-Signals.<br />
Schutzintervall länger als ∆τ sein, um ein Übersprechen aufeinander folgender Symbole zu vermeiden.<br />
Beispiele für OFDM-Übertragung sind z. B. DAB (digital audio broadcast), DRM (digital radio mondiale),<br />
DVB-T (digital video broadcast-terrestrial) oder DSL (digital subscriber line).<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/1<br />
Der Zweck eines Phasenregelkreises (englisch phase–locked– loop = PLL) besteht darin, ein Oszillatorsignal<br />
zu generieren, das frequenz- und phasenrichtig mit dem Eingangssignal übereinstimmt.<br />
Anwendungsbeispiele: PM-Demodulation, FM-Demodulation, Trägerrückgewinnung, Taktrückgewinnung<br />
bei Puls-Code-modulierten Signalen, Frequenzsynthese<br />
1 Arbeitsprinzip<br />
Das Prinzip eines Phasenregelkreises ist im Bild 1 dargestellt.<br />
Abb. 1: Darstellung eines Phasenregelkreises (PLL)<br />
Ein Phasenregelkreis besteht aus dem Phasendifferenzdetektor, dessen Ausgangssignalu 3 (t) ist im wesentlichen<br />
proportional zur Phasendifferenz [ ϕ i (t)−ϕ a (t) ] , dem Schleifenfilter (im allgemeinen ein<br />
Tiefpaßfilter) mit der ÜbertragungsfunktionF(s), (s–komplexe Frequenzs=jω+σ) und dem spannungsgesteuerten<br />
Oszillator (VCO = voltage controlled oscillator), dessen Ausgangsfrequenz durch die<br />
Spannungu 4 (t) gesteuert wird. Ungewöhnlich ist bei einem Phasenregelkreis, daß als Eingangssignale<br />
zeitabhängige Winkelϕ i (t),ϕ a (t) vorliegen. Bei Annahme harmonischer Spannungenu 1 (t),u 2 (t)<br />
sind diese zu verstehen gemäß<br />
u 1 (t)=Û 1 cos ( ω 0 t+ϕ i (t) ) bzw. u 1 (t)=Û 1 sin ( ω 0 t+ϕ i (t) ) (1)<br />
und<br />
u 2 (t)=Û 2 cos ( ω 0 t+ϕ a (t) ) bzw. u 2 (t)=Û 2 sin ( ω 0 t+ϕ a (t) ) (2)<br />
mit den Momentanfrequenzen (vgl. FM-Modulation)<br />
ω i (t)=ω 0 +dϕ i /dt (3)<br />
ω a (t)=ω 0 +dϕ a /dt (4)<br />
ω 0 ist dabei eine Bezugsfrequenz (z.B. eine mittlere Frequenz des VCO füru 4 =0). Die Wirkungsweise<br />
des Phasenregelkreises ist dabei so zu verstehen, daß bei einer Phasendifferenzϕ i −ϕ a =0 einu 3 (t)<br />
und schließlich einu 4 (t) entsteht, so daß die Frequenzω a (t) des VCO’s und gemäß Gl.(4) auch<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/2<br />
ϕ a (t) so geändert wird, bis schließlichϕ i −ϕ a =0 oder zumindest eine konstante Regelabweichung<br />
ϕ i −ϕ a =const erreicht wird. Die Phasen sind zeitabhängige Größenϕ i (t),ϕ a (t). Für eine Analyse<br />
des Regelverhaltens des Phasenregelkreises ist jedoch ähnlich wie bei konventionellen Netzwerken eine<br />
Analyse im Frequenzbereich zweckmäßig. Mit der komplexen Frequenzs=jω+σ werden deshalb im<br />
folgenden die Laplace-Transformierten vonϕ i (t),ϕ a (t) gemäßφ i (s),φ a (s) eingeführt.<br />
2 Multiplizierender Phasendifferenzdetektor<br />
Während in Bild 1 die Realisierung des Schleifenfilters und des VCO’s (z.B. Ansteuerung über spannungsabhängige<br />
Kapazität in Form einer Kapazitätsdiode) geläufig ist, stellt der Phasendifferenzdetektor<br />
eine zunächst ungewöhnliche Komponente dar. Eine Möglichkeit zur Realisierung eines Phasendifferenzdetektors<br />
stellt die Verwendung eines Multiplizierers dar (auch als ”lineare” PLL bezeichnet,<br />
da im Sinne der IC-Technologie lineare bzw. analoge IC’s verwendet werden). Mit<br />
u 1 (t)=Û 1 sin ( ω 0 t+ϕ i (t) ) (5)<br />
und<br />
u 2 (t)=Û 2 cos ( ω 0 t+ϕ a (t) ) (6)<br />
ergibt die Multiplikation<br />
u 1 (t)u 2 (t)= 1 2Û1Û2<br />
( sin(ϕi −ϕ a )+sin(2ω 0 t+ϕ i +ϕ a ) ) (7)<br />
Der Signalanteil bei der doppelten Frequenz2ω 0 wird entweder durch das Schleifenfilter oder ein<br />
separates Filter weggefiltert, so daß nur der erste Teil verbleibt und man so mitu 3 (t)=K 3 u 1 (t)u 2 (t)<br />
einen Phasendifferenzdetektor mit<br />
u 3 (t)=K d sin ( ϕ i (t)−ϕ a (t) ) (8)<br />
erhält, wobei die KonstanteK d gemäß<br />
K d = 1 2 K 3Û1Û2 (9)<br />
gegeben ist.<br />
3 Linearisierte Beschreibung<br />
Für einen idealen Phasendifferenzdetektor wäre<br />
u 3 (t)=K d<br />
(<br />
ϕi (t)−ϕ a (t) ) (10)<br />
bzw. im Frequenzbereich<br />
U 3 (s)=K d<br />
(<br />
φi (s)−φ a (s) ) (11)<br />
mit der KonstantenK d . Das mit der Phase periodische Verhalten vonu 1 (t),u 2 (t) hat zur Folge, daß<br />
die Phasendifferenz nur bis maximal±π eindeutig definiert werden kann (abhängig vom Typ des Phasendifferenzdetektors;<br />
bei einem multiplizierenden Phasendifferenzdetektor ist der Linearitätsbereich<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/3<br />
gemäß Gl.(8) sogar nur auf ca.±1rad beschränkt). Im Rahmen der linearen Analyse sollen deshalb<br />
zunächst derart kleine Phasendifferenzen vorangesetzt werden. Im Rahmen von Bild 1 gilt weiterhin:<br />
U 4 (s)=F(s)U 3 (s) (12)<br />
Für den spannungsgesteuerten Oszillator gilt in der linearen Näherung<br />
ω a (t)=ω 0 +K 0·u 4 (t) (13)<br />
wenn die Referenzfrequenzω 0 so gewählt wird, daßω a =ω 0 füru 4 =0. Gl.(13) läßt sich mit Gl.(4)<br />
auch schreiben als<br />
dϕ a<br />
=K 0 u 4 (t) (14)<br />
dt<br />
so daß sich nach Transformation in dem Frequenzbereich<br />
s·φ a (s)=K 0 U 4 (s) (15)<br />
ergibt (Ableitung nach der Zeit entspricht der Multiplikation mit s im Frequenzbereich). Kombination<br />
der Gl.(11),(12),(15) führt auf die Übertragungsfunktion von der Eingangsphaseϕ i (t) zur Ausgangsphaseϕ<br />
a (t) gemäß<br />
mit der Schleifenverstärkung<br />
φ a (s)<br />
φ i (s)<br />
=H(s)=<br />
G(s)<br />
1+G(s)<br />
(16)<br />
G(s)=K 0 K d F(s)/s (17)<br />
Für die Stabilität gelten die normalen Netzwerkbetrachtungen, d.h.H(s) darf keine Pole in der rechten<br />
s-Halbebene aufweisen. DaF(s) ein Tiefpaßverhalten aufweist, wirdF(s) und damit auchσ(s) mit<br />
zunehmender Frequenzω(mits=jω) kleiner, so daßϕ a (t) (bzw.φ a (s)) insbesondere bei kleinen<br />
Frequenzen (kleines) der Eingangsphaseϕ i (t) (bzw.φ i (s)) sehr genau folgt. Für höhere Frequenzen<br />
wird die Regelabweichung größer und man definiert eine Grenzfrequenzω g des Phasenregelkreises,<br />
wenn<br />
wird.<br />
|G(s=jω g )|=1 (18)<br />
4 Statischer Phasenfehler<br />
Wir nehmen an, die PLL sei bei konstanter Eingangsfrequenz eingerastet (d.h.ω i =ω a bzw.dϕ i /dt=<br />
dϕ a /dt), die Frequenzω i =ω a weiche aber um<br />
∆ω 0 =ω a −ω 0 (19)<br />
von der Referenzfrequenzω 0 ab. Eine statische Lösung der PLL bietet dann<br />
u 3 = K d (ϕ i −ϕ a ) (20)<br />
u 4 = F(s=0)u 3 (21)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/4<br />
und gemäß Gl.(13)<br />
∆ω 0 =ω a −ω 0 =K 0·u 4 (22)<br />
Die Größe des statischen Phasenfehlers ergibt sich dann aus Gl.(21) - (22) zu<br />
(ϕ i −ϕ a )=<br />
∆ω 0<br />
K d K 0 F(s=0)<br />
(23)<br />
der genügend klein bleiben muß, damit der Phasendifferenzdetektor im linearen Bereich verbleibt (z.B.<br />
|ϕ i −ϕ a |≤1rad für den multiplizierenden Phasendifferenzdetektor).<br />
Um möglichst große Frequenzabweichungen∆ω 0 zulassen zu können (vergleiche auch weiter unten<br />
die Diskussion über den Haltebereich), sollteF(s=0) möglichst groß sein, weshalb Filter mit integrierendem<br />
Anteil vorteilhaft sind.<br />
5 Schleifenfilter<br />
Das Schleifenfilter mit der ÜbertragungsfunktionF(s) ist normalerweise ein Filter 1. Ordnung mit der<br />
Übertragungsfunktion<br />
F(s)=K n<br />
s+ω 2<br />
s+ω 1<br />
(24)<br />
Für einen verschwindenden Phasenfehler gemäß Gl.(23) ist man an einem integrierenden Filter mit<br />
ω 1 →0, d.h.<br />
s+ω 2<br />
F(s)=K n<br />
s<br />
interessiert, welches beispielsweise gemäß Bild 2<br />
(25)<br />
Abb. 2: Realisierungsmöglichkeit für ein integrierendes Tiefpaßfilter 1. Ordnung<br />
als aktives Filter mit<br />
K n = R 2<br />
R 1<br />
; ω 2 = 1<br />
R 2 C<br />
realisiert werden kann. Für die SchleifenverstärkungG(s) gemäß Gl.(17) gilt mit Gl.(25)<br />
(26)<br />
G(s)=K(s+ω 2 )/s 2 (27)<br />
mit<br />
K=K d K n K 0 (28)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/5<br />
und für die Phasenübertragungsfunktion gemäß Gl.(16) ergibt sich eine Übertragungsfunktion 2. Ordnung<br />
H(s)= G(s)<br />
1+G(s) = K·s+K·ω 2<br />
s 2 +K·s+K·ω 2<br />
(29)<br />
Abb. 3: SchleifenverstärkungG(jω) und PhasenübertragungsfunktionH(jω)<br />
(Zur Beschreibung der Übertragungsfunktion werden in der Literatur auch die Abkürzungenω n =<br />
√ √<br />
Kω2 undζ=0.5 K<br />
ω 2<br />
verwendet). Die Grenzfrequenzω g des Phasenregelkreises gemäß Gl.(18) mit<br />
|G(s=jω g )|=1 ergibt sich fürω 2
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/6<br />
Abb. 4: Ausgangsphaseϕ a (t) für einen Einheitssprung der Eingangsphaseϕ i (t)<br />
6 Einrastprobleme<br />
Da bei starken Frequenzänderungen am Eingang wegenϕ= ∫ ∆ωdt erhebliche Phasenänderungen entstehen,<br />
kann der lineare Bereich der PLL leicht verlassen werden, so daß es dann zu Einrastproblemen<br />
kommt. Das Einrastverhalten hängt in starkem Maße von der Art des verwendeten Phasendifferenzdetektors<br />
ab, wobei die folgende Diskussion am Beispiel des unter 2. beschriebenen multiplizierenden<br />
Phasendifferenzdetektors erfolgt.<br />
6.1 Haltebereich<br />
Der Haltebereich bezeichnet den Bereich, in dem die PLL langsamen Frequenzänderungen des Eingangssignals<br />
sicher folgen kann. Wenn Gl.(23) für den multiplizierenden Phasendifferenzdetektor ausgewertet<br />
wird, ergibt sich eigentlich<br />
sin(ϕ i −ϕ a )=<br />
so daß wegensin(ϕ i −ϕ a )
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/7<br />
maximale Frequenzänderung∆ω=∆ω L , so daß die PLL innerhalb einer Periode der Differenzfrequenz<br />
∆ω einrastet.<br />
6.2.1 Intuitive Herleitung<br />
Wenn am Eingang des Phasendifferenzdetektorsu 1 (t) undu 2 (t) sich in der Frequenz um∆ω unterscheiden,<br />
entsteht am Ausgang des multiplizierenden Phasendifferenzdetektors<br />
u 3 (t)=K d sin(∆ωt+ψ 3 ) (34)<br />
mit einer zunächst willkürlichen Phaseψ 3 . Das FilterF(s) überträgt nunu 3 (t) mits=j∆ω, so daß<br />
sich<br />
u 4 (t)=K d |F(j∆ω)|sin(∆ωt+ψ 4 ) (35)<br />
ergibt, womit der VCO gemäß Gl.(13) als Ausgangsfrequenz liefern würde:<br />
ω a (t)=ω 0 +∆ω a sin(∆ωt+ψ 4 ) (36)<br />
mit<br />
∆ω a =K 0 K d |F(j∆ω)| (37)<br />
Die Betrachtung ist insofern grob vereinfacht, da eine Modulation vonω a (t) sofort auch die Differenzfrequenz<br />
und damit∆ω moduliert. Innerhalb des Fangbereichs∆ω∆ω, so daß die<br />
Frequenzvariation des VCO ausreicht, um den anfänglichen Frequenzsprung∆ω auszugleichen. Der<br />
Fangbereich∆ω L ist nur erreicht, wenn∆ω a =∆ω wird, so daß gilt:<br />
∆ω a =∆ω= ! ∆ω L (38)<br />
und sich so∆ω L gemäß<br />
∆ω L =K 0 K d |F(j∆ω L )| (39)<br />
ergibt. Ein Vergleich mit Gl.(17), (18) zeigt, daß damit der Fangbereich<br />
∆ω L =ω g (40)<br />
durch die Grenzfrequenz der PLL gegeben ist. Bild 5 skizziert grobω 2 (t) für einen Frequenzsprung<br />
vonω 1 um∆ω=∆ω L .<br />
6.2.2 PLL-Antwort auf einen Frequenzsprung am Eingang<br />
Um die Dynamik einer PLL noch besser zu verstehen, sollω a (t) bei einem Frequenzsprung vonω i (t)<br />
im Rahmen der linearisierten Beschreibung (Abschnitt 3) analysiert werden. Fürt0 (42)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/8<br />
Abb. 5: Vereinfachtes Einrastverhalten für∆ω=∆ω L innerhalb des Fangbereichs<br />
und damit<br />
ϕ i =∆ω·t für t>0 (43)<br />
Die Laplace- Transformation von Gl.(43) liefert<br />
woraus sich die VCO-Ausgangsphase<br />
φ i (s)=∆ω/s 2 (44)<br />
φ a (s)=φ i (s)H(s) (45)<br />
ergibt. Wir sind an der Ausgangsfrequenzω a (t) interessiert (vgl.Gl.(4)):<br />
ω a (t)−ω 0 =dϕ a /dt , (46)<br />
so daß es zweckmäßig ist, die LaplacetransformierteΩ a (s) von [ ω a (t)−ω 0<br />
] einzuführen, so daß aus<br />
Gl.(46) folgt:<br />
Ω a (s)=sφ a (s) (47)<br />
(Differentiation nach t entspricht nach Laplace-Transformation Multiplikation mit s). Mit Gl.(46),<br />
(47) gilt damit<br />
MitH(s) gemäß Gl.(28) undω 2 =K/4 folgt dann<br />
Ω a (s)= ∆ω<br />
s<br />
Ω a (s)=sφ i (s)H(s) (48)<br />
Ks+Kω 2<br />
s 2 = ∆ω·K<br />
+Ks+Kω 2 s<br />
woraus sich nach Rücktransformation in den Zeitbereich ergibt<br />
s+K/4<br />
( s+K/2<br />
) 2<br />
(49)<br />
{<br />
ω a (t)−ω 0 =∆ω 1−e −Kt/2[ 1−Kt/2 ]} ,t>0 (50)<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/9<br />
Für den Phasenfilter gilt entsprechend:<br />
φ i (s)−φ a (s)=φ i (s) ( 1−H(s) ) =<br />
∆ω<br />
( s+K/2<br />
) 2<br />
(51)<br />
woraus sich im Zeitbereich<br />
ϕ i (t)−ϕ a (t)= ∆ω<br />
K Kte−Kt/2 (52)<br />
ergibt. Das Einrastverhalten gemäß Gl.(50), (52) ist in Bild 6 dargestellt.<br />
Abb. 6: Verlauf vonω a (t) für einen Frequenzsprung vonω i (t) zur Zeitt=0und zugehöriger Phasenfilter<br />
[ ϕ i (t)−ϕ a (t) ] für ein integrierendes PLL-Filter 1. Ordnung mitω 2 =K/4<br />
Falls sich∆ω gerade am Rand des Fangbereichs mit∆ω=∆ω L =ω g ≃K befindet, wird der maximale<br />
Phasenfehler(ϕ i −ϕ a ) max =0,736, so daß die linearisierte Beschreibung für den Phasendifferenzdetektor<br />
noch einigermaßen gültig ist und auch der Verlauf vonω 2 (t) gemäß Bild 6 recht gut der<br />
intuitiven Darstellung in Bild 5 entspricht.<br />
6.3 Ziehbereich<br />
Auch für∆ω>∆ω L ist ein Einrasten der PLL unter Umständen bis zu∆ω
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/10<br />
Abb. 7: Einrastvorgang innerhalb des Ziehbereichs mit∆ω L ω a und einu 3
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/11<br />
Abb. 8: Realisierung eines 3-Zustands-Phasendifferenzdetektors<br />
Abb. 9: Zustandsdiagramm des Phasendifferenzdetektors nach Bild 8<br />
weise des Phasendifferenzdetektors seien zunächst gleiche Frequenzenω i =ω a vonu 1 ,u 2 angenommen,<br />
wobeiu 1 gegenüberu 2 umπ/2 nacheilt (ϕ i −ϕ a =−π/2 ):<br />
Es ergibt sich somit ein=0,=0,25 und damit gemäß Gl.(54):<br />
u 3 =−π/2K d (55)<br />
Tatsächlich ergibt sich ein linearer Arbeitsbereich<br />
u 3 =K d (ϕ i −ϕ a ) für |ϕ i −ϕ a |ω a die Anstiegsflanken vonu 1 , so daß<br />
der Phasendifferenzdetektor nur die Zustände 2 und 3 annimmt und damit wie gefürchtetu 3 >0wird,<br />
während fürω i
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/12<br />
Abb. 10: Arbeitsweise des 3-Zustands-Phasendifferenzdetektors fürω i =ω a<br />
7 Anwendungen<br />
7.1 Demodulation phasenmodulierter Signale<br />
Eine Demodulation von analog PM- oder digital PSK-modulierten Signalen ist in einfacher Weise nach<br />
dem Phasendifferenzdetektor möglich, da<br />
u 3 =K d (ϕ i −ϕ a ) (57)<br />
unmittelbar der modulierten Signalphaseϕ i (t) folgt, solange nurϕ a ≃ constant ist. Deshalb ist für<br />
die Übertragungsfunktion<br />
φ a (s)<br />
φ i (s)<br />
=H(s)≃0 (58)<br />
im interessierenden Frequenzbereich zu finden, d.h. die PLL- Grenzfrequenzω g muß kleiner als die<br />
untere Grenzfrequenz des phasenmodulierten Signals sein.<br />
7.2 Demodulation frequenzmodulierter Signale<br />
Die Demodulation frequenzmodulierter Signale ist in einfacher Weise möglich, wenn<br />
φ a (s)<br />
φ i (s)<br />
=H(s)≃1 (59)<br />
und damit<br />
ω a (t)≃ω i (t) (60)<br />
innerhalb des Modulationsfrequenzbereichs gilt. Dau 4 (t) linear mitω a (t) verknüpft ist, läßt sich dann<br />
das demodulierte Signal mitu 4 (t) gewinnen. Die PLL-Grenzfrequenzω g muß größer sein als die obere<br />
<strong>TU</strong> <strong>Berlin</strong> – Prof. Dr.-Ing. K. Petermann
Hochfrequenztechnik II Phasenregelkreise (PLL) PLL/13<br />
Modulationsfrequenz der FM-Modulation. Weiterhin ist sicherzustellen, daß auch bei hohen Frequenzsprüngen<br />
die PLL eingerastet bleibt, wofür∆ω t