Regelsysteme 1 - 4. Übung: MATLAB 1 - Rückführung ... - ETH Zürich
Regelsysteme 1 - 4. Übung: MATLAB 1 - Rückführung ... - ETH Zürich
Regelsysteme 1 - 4. Übung: MATLAB 1 - Rückführung ... - ETH Zürich

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Regelsysteme</strong> 1<br />
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach,<br />
David Sturzenegger, Xiaojing Zhang, Marcello Colombino und<br />
David Ochsenbein<br />
Institut für Automatik<br />
<strong>ETH</strong> <strong>Zürich</strong><br />
Herbstsemester 2013<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Gliederung<br />
<strong>4.</strong>1. Idee der <strong>Rückführung</strong><br />
<strong>4.</strong>2. Spezifikation im Zeitbereich<br />
<strong>4.</strong>3. PID-Regler<br />
<strong>4.</strong><strong>4.</strong> <strong>MATLAB</strong><br />
<strong>4.</strong>5. Ankündigung Kurztest<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<br />
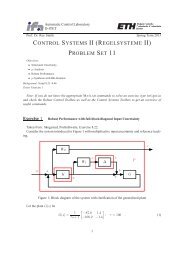
Idee der <strong>Rückführung</strong><br />
<br />
Idee der <strong>Rückführung</strong><br />
W<br />
R<br />
<br />
<br />
Controller<br />
D<br />
u<br />
<br />
<br />
Plant<br />
G<br />
Y<br />
<br />
<br />
V<br />
Unter idealen Bedingungen (w = v = 0): r ≠ y ⇒ u ≠ 0, der<br />
Regler berechnet eine Stellgrösse, die die y in Richtung r bringt<br />
Bei Störungen (w ≠ 0, v = 0): der gewählte Regeleingang wird<br />
verfälscht, die Regelung ist schlechter<br />
Unter Messrauschen (w = 0, v ≠ 0): die Messung wird verfälscht, der<br />
Regler reagiert falsch / später<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-2 Da
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Gliederung<br />
<strong>4.</strong>1. Idee der <strong>Rückführung</strong><br />
<strong>4.</strong>2. Spezifikation im Zeitbereich<br />
<strong>4.</strong>3. PID-Regler<br />
<strong>4.</strong><strong>4.</strong> <strong>MATLAB</strong><br />
<strong>4.</strong>5. Ankündigung Kurztest<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Spezifikation im Zeitbereich<br />
Spezifikation im Zeitbereich<br />
Sprungantwort eines gedämpften Systems 2. Ordnung ([FrPE10], Abb. 3.22):<br />
ζ < 1 :<br />
y(t) = 1 −<br />
( √<br />
1<br />
ζt √1<br />
√ t e− τ sin − ζ<br />
2 1 − ζ<br />
2<br />
1 − ζ<br />
2 τ + tan−1 ζ<br />
)<br />
t p<br />
M p<br />
1%<br />
1<br />
0.9<br />
0.1<br />
t r<br />
t<br />
t s<br />
Anstiegszeit (rise time) t r<br />
∼ =<br />
1.8<br />
ω n<br />
π<br />
(Anregelzeit) (peak time) t p = √<br />
ω n 1−ζ 2<br />
Überschwingen (overshoot) M p = e − √<br />
πζ<br />
1−ζ 2 , 0 ≤ ζ < 1<br />
Ausregelzeit (settling time) t s<br />
∼ =<br />
<strong>4.</strong>6<br />
ζω n<br />
= <strong>4.</strong>6<br />
σ<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-3 Da
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Gliederung<br />
<strong>4.</strong>1. Idee der <strong>Rückführung</strong><br />
<strong>4.</strong>2. Spezifikation im Zeitbereich<br />
<strong>4.</strong>3. PID-Regler<br />
<strong>4.</strong><strong>4.</strong> <strong>MATLAB</strong><br />
<strong>4.</strong>5. Ankündigung Kurztest<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
PID-Regler<br />
Der PID-Regler<br />
Proportionaler Anteil:<br />
u = Ke ⇒ D(s) = K<br />
Integraler Anteil:<br />
u(t) = K T I<br />
∫ t<br />
Differentieller Anteil:<br />
t 0<br />
e(η)dη ⇒ D(s) = K T I s<br />
u = KT D ė ⇒ D(s) = KT D s<br />
Diese Elemente können miteinander kombiniert, d.h. aufsummiert, werden,<br />
typisch sind P-, PI-, PD- und PID-Regler<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-4 Da
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Gliederung<br />
<strong>4.</strong>1. Idee der <strong>Rückführung</strong><br />
<strong>4.</strong>2. Spezifikation im Zeitbereich<br />
<strong>4.</strong>3. PID-Regler<br />
<strong>4.</strong><strong>4.</strong> <strong>MATLAB</strong><br />
<strong>4.</strong>5. Ankündigung Kurztest<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
Einige <strong>MATLAB</strong>-Befehle<br />
Einige wichtige <strong>MATLAB</strong>-Befehle:<br />
help - zeigt Hilfe zu einem Befehl an: help help<br />
lookfor - durchsucht alle Befehlsbeschreibungen nach einem<br />
Stichwort: lookfor ’PID controller’<br />
ss - Zustandsraummodell:<br />
[ ]<br />
1 2<br />
ẋ(t) =<br />
0 1<br />
x(t) +<br />
[<br />
0<br />
1]<br />
u(t) , y(t) =<br />
[ ]<br />
1 0 x(t)<br />
sys = ss([1 2; 0 1],[0; 1],[1 0],0)<br />
tf - Übertragungsfunktion: G(s) = s+4<br />
s 2 +3s+10<br />
G = tf([1 4],[1 3 10]), auch möglich: G = tf(sys)<br />
Weitere Alternative: s=tf([1 0] ,[0 1]), dann z.B. g=1/(s-3)<br />
step - Sprungantwort: step(sys), step(G)<br />
sisotool - grafische Oberfläche zur Reglerauslegung: sisotool(G)<br />
Eine umfassendere Liste der wichtigsten <strong>MATLAB</strong>-Befehle kann auf der<br />
Kursseite heruntergeladen werden.<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-5 Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
sisotool Oberfläche<br />
Wichtige Funktionen:<br />
Struktur der Regelschleife festlegen (Control Architecture)<br />
Daten aus dem Workspace laden (System Data)<br />
Reglerparameter (Pole, Nullstellen...) festlegen (Compensator Editor)<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-6 Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
Struktur der Regelschleife<br />
Wichtige Elemente der Standardregelschleife:<br />
Negative <strong>Rückführung</strong> (S1 sign = -1)<br />
Regler (C), Strecke (G)<br />
Referenzeingang (r), Störeingang (du), Rauscheingang (dy)<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-7 Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
Reglerdesign<br />
Wurzelortskurve:<br />
zeigt Pole (blaues x) und Nullstellen (blaues o) der Strecke<br />
zeigt Pole des geschlossenen Kreises (lila ) abhängig von der<br />
Reglerverstärkung<br />
erlaubt Änderung des Reglers (hinzufügen von Polen und Nullstellen<br />
per Rechtsklick, Änderung der Verstärkung durch ziehen der lila )<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-8 Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
Wichtige Analysewerkzeuge<br />
Wurzelortskurve (Polstellenlage des geschlossenen Kreises ⇒<br />
Instabilität)<br />
Bodediagramm des offenen Kreises (auch im Designfenster)<br />
Sprungantwort (Analysis - Response to Step Command)<br />
Störunterdrückung (Analysis - Response to Step Disturbance)<br />
Weitere Plots können unter Analysis Plots in der grafischen Oberfläche<br />
angelegt werden.<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-9 Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
<strong>MATLAB</strong><br />
Zur Definition von nicht-minimalphasigen Systemen:<br />
Wenn wir im Zusammenhang mit dieser Vorlesung von<br />
nicht-minimalphasig sprechen, meinen wir immer<br />
Systeme mit RHP Zero(s) und/oder time Delay(s).<br />
Diese Definition geht nicht auf instabile Systeme ein, und bezieht sich<br />
nicht in erster Linie auf das Verhalten der Phase im Bode-Diagramm,<br />
sondern fusst auf der Tatsache, dass diese beiden Eigenschaften die<br />
Regelgüte eines Systems grundlegend negativ beeinflussen. Wir erachten<br />
diese Definition für unsere Zwecke daher am nützlichsten.<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-10 Da
<strong>4.</strong> <strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Gliederung<br />
<strong>4.</strong>1. Idee der <strong>Rückführung</strong><br />
<strong>4.</strong>2. Spezifikation im Zeitbereich<br />
<strong>4.</strong>3. PID-Regler<br />
<strong>4.</strong><strong>4.</strong> <strong>MATLAB</strong><br />
<strong>4.</strong>5. Ankündigung Kurztest<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Marcello Herbstsemester Colombino2013<br />
und Da
<strong>Übung</strong>: <strong>MATLAB</strong> 1 - <strong>Rückführung</strong> und PID Regelung<br />
Ankündigung Kurztest<br />
Ankündigung Kurztest<br />
Nicht vergessen: Nächste Woche findet der erste Kurztest statt!<br />
Wann? 22.10.2013, 10:15 Uhr - 11:00 Uhr<br />
Wo? CHN C14 (normaler Raum für die <strong>Übung</strong>en)<br />
Erklärung der Musterlösung gleich anschliessend 11:10-11:55<br />
Alle Informationen sind auch auf der Kursseite zu finden.<br />
Christian Conte, Giampolo Torrisi, Manfred Quack, Georg Schildbach, <strong>Regelsysteme</strong> David 1 Sturzenegger, Xiaojing Zhang, Herbstsemester Marcello Colombino 2013 und 4-11 Da








![Convex Optimization: [0.5ex] from Real-Time ... - ETH Zürich](https://img.yumpu.com/18678007/1/190x143/convex-optimization-05ex-from-real-time-eth-zurich.jpg?quality=85)