⇓ ⇓
11_Schwingungen_Einf%FChrung_BA.pdf
11_Schwingungen_Einf%FChrung_BA.pdf

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Physik EI01 Schwingungen Seite<br />
SCHWINGUNGEN, WELLEN, OPTIK<br />
1 SCHWINGUNGEN<br />
Einführung<br />
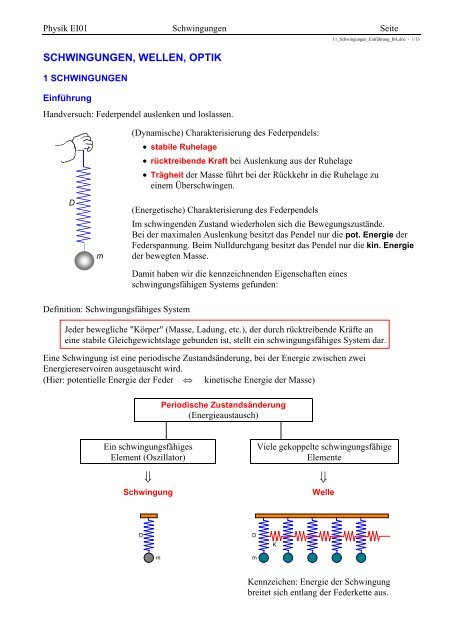
Handversuch: Federpendel auslenken und loslassen.<br />
(Dynamische) Charakterisierung des Federpendels:<br />
• stabile Ruhelage<br />
• rücktreibende Kraft bei Auslenkung aus der Ruhelage<br />
11_Schwingungen_Einführung_BA.doc - 1/13<br />
• Trägheit der Masse führt bei der Rückkehr in die Ruhelage zu<br />
einem Überschwingen.<br />
D<br />
m<br />
(Energetische) Charakterisierung des Federpendels<br />
Im schwingenden Zustand wiederholen sich die Bewegungszustände.<br />
Bei der maximalen Auslenkung besitzt das Pendel nur die pot. Energie der<br />
Federspannung. Beim Nulldurchgang besitzt das Pendel nur die kin. Energie<br />
der bewegten Masse.<br />
Damit haben wir die kennzeichnenden Eigenschaften eines<br />
schwingungsfähigen Systems gefunden:<br />
Definition: Schwingungsfähiges System<br />
Jeder bewegliche "Körper" (Masse, Ladung, etc.), der durch rücktreibende Kräfte an<br />
eine stabile Gleichgewichtslage gebunden ist, stellt ein schwingungsfähiges System dar.<br />
Eine Schwingung ist eine periodische Zustandsänderung, bei der Energie zwischen zwei<br />
Energiereservoiren ausgetauscht wird.<br />
(Hier: potentielle Energie der Feder ⇔ kinetische Energie der Masse)<br />
Periodische Zustandsänderung<br />
(Energieaustausch)<br />
Ein schwingungsfähiges<br />
Element (Oszillator)<br />
<strong>⇓</strong><br />
Schwingung<br />
Viele gekoppelte schwingungsfähige<br />
Elemente<br />
<strong>⇓</strong><br />
Welle<br />
D<br />
m<br />
D<br />
m<br />
K<br />
Kennzeichen: Energie der Schwingung<br />
breitet sich entlang der Federkette aus.
Physik EI01 Schwingungen Seite<br />
1.1 Der Harmonische Oszillator (freie, ungedämpfte Schwingung)<br />
11_Schwingungen_Einführung_BA.doc - 2/13<br />
Periodische Bewegung<br />
Nach einem Zeitintervall T (Periodendauer) wiederholt sich ein bestimmter Bewegungszustand<br />
in gleicher (ungedämpfte Schwingung) oder ähnlicher (gedämpfte Schwingung) Form.<br />
Beispiel für eine periodische Beregung:<br />
Ψ(t): physikalische Größe<br />
Ψ(t)<br />
T<br />
(Auslenkung, Ladung, Spannung etc. )<br />
t<br />
Ψ() t = Ψ( t+ T) = Ψ( t+ 2 T) = ...<br />
T: Periodendauer<br />
Wichtigster Spezialfall einer periodischen Bewegung:<br />
Harmonische Schwingung - der Schwingungsvorgang läßt sich mit einer einfachen Sinus- bzw.<br />
Kosinusfunktion beschreiben. (Wir werden sehen, dass sich eine harmonische Schwingung immer<br />
dann ergibt, wenn die rücktreibende Kraft einem linearen Kraftgesetz gehorcht).<br />
Kinematik der harmonischen Schwingung<br />
Nach obiger Definition ist eine Kreisbewegung mit der Winkelgeschwindigkeit ω = 2π/T = const<br />
eine Schwingung mit der Periode T (→ zirkulare Schwingung).<br />
Eine lineare Schwingung, d.h. eine Bewegung auf einer geraden Bahn ergibt sich durch Projektion auf<br />
die x- oder y-Achse.<br />
y<br />
y<br />
r<br />
r<br />
ϕ<br />
x<br />
0<br />
T/2 T<br />
(π) (2π)<br />
t<br />
(ϕ)<br />
π<br />
r<br />
x<br />
Projektion auf y-Achse:<br />
y( ϕ) = rsinϕ<br />
yt () = rsinω<br />
t<br />
ϕ<br />
2π<br />
Projektion auf x-Achse:<br />
x ( ϕ)<br />
= r cosϕ<br />
x( t)<br />
= r cosωt
Physik EI01 Schwingungen Seite<br />
11_Schwingungen_Einführung_BA.doc - 3/13<br />
Weg- Zeitgesetz der harmonischen Schwingung<br />
st () = s$ sinω<br />
t<br />
mit: s = Amplitude<br />
ωt = ϕ = Phase (entspricht dem Dreh winkel,<br />
bzw. dem Bogen auf dem Einheitskreis)<br />
ω = Kreisfrequenz, [ω] = rad/s<br />
f = Frequenz<br />
t = Zeit<br />
2π<br />
Wegen: ω = = 2πf<br />
äquivalente Schreibweise<br />
T<br />
st () = 2π<br />
s$ sin(<br />
T t ) = s $ sin( 2π<br />
ft )<br />
Geschwindigkeit<br />
ds<br />
vt ()=<br />
dt<br />
vt () = s$ ω cosω<br />
t<br />
mit vmax = s$ ω = v$<br />
r<br />
0<br />
0<br />
s(t)<br />
v(t)<br />
T/2 T<br />
T/2 T<br />
t<br />
t<br />
Beschleunigung<br />
2<br />
dv d s<br />
a ( t)<br />
= =<br />
dt<br />
2<br />
dt<br />
2 2<br />
at () =− s$ ω sin ωt=−ω<br />
st ( )<br />
a(t)<br />
t<br />
mit amax = s$ ω 2 = a$<br />
T/2 T<br />
Allgemeine Form einer harm. Schwingung<br />
st () = s$ sin( ωt+<br />
ϕ 0 )<br />
ϕ 0 = Phase für t = 0<br />
(Nullphasenwinkel)<br />
s(t)<br />
t
Physik EI01 Schwingungen Seite<br />
1.1.1 Das Federpendel (Dynamik des harmonischen Oszillators)<br />
11_Schwingungen_Einführung_BA.doc - 4/13<br />
Bewegung einer trägen Masse um eine stabile Ruhelage, wobei die rücktreibende Kraft dem<br />
linearen Kraftgesetz gehorcht.<br />
stabile Ruhelage<br />
D<br />
m<br />
Bei Auslenkung aus der Ruhelage tritt<br />
eine rücktreibende Kraft auf, die bei<br />
kleinen Auslenkungen dem<br />
Hookschen Gesetz folgt:<br />
F Rück<br />
F Rück = −Dx<br />
D = Federkonstante<br />
x<br />
Annahme: Reibungsfreie Unterlage und masselose Feder<br />
Die Anwendung des Newtonschen Aktionsprinzips (2. Newton Gesetz) führt auf die<br />
Bewegungsgleichung der freien, ungedämpften Schwingung.<br />
m&&<br />
x t)<br />
= ∑ F<br />
mx &&(<br />
t)<br />
= −Dx<br />
( ang.<br />
m & x + Dx = 0 Bewegungsgleichung (Differentialgleichung) der harmonischen Schwingung<br />
homogene, lineare DGL 2. Ordnung mit konstanten Koeffizienten<br />
- homogen: DGL wird Null, wenn Variable oder ihre Ableitungen Null sind<br />
- linear: keine Produkte oder Potenzen von x, dx/dt usw.<br />
- 2. Ordnung: höchste Ableitung ist die 2. Ableitung<br />
- konstante Koeffizienten: Koeffizienten (m, D) sind konstant<br />
Lösung der DGL:<br />
Lösungsansatz: vielfach durch Raten und Ausprobieren<br />
x(<br />
t)<br />
= xˆ<br />
sin( ω0t<br />
+ ϕ)<br />
x&<br />
( t)<br />
= xˆ<br />
ω cos( ω t + ϕ)<br />
&& x(<br />
t)<br />
= −xˆ<br />
ω<br />
2<br />
0<br />
sin( ω t + ϕ)<br />
Einsetzen in DGL:<br />
2 D<br />
( −ω<br />
+ ) ⋅ xˆ<br />
⋅sin(<br />
ω0t<br />
+ ϕ)<br />
m<br />
0 =<br />
0<br />
0<br />
2<br />
ω 0<br />
D<br />
=<br />
m<br />
Kreisfrequenz der freien ungedämpften Schwingung<br />
ω 0 ist unabhängig von der Amplitude<br />
(wesentliches Kennzeichen der harmonischen Schwingung)<br />
2<br />
0 =<br />
& x<br />
+ ω x 0 DGL in “Normalform“
Physik EI01 Schwingungen Seite<br />
11_Schwingungen_Einführung_BA.doc - 5/13<br />
Das Weg-Zeitgesetz lautet also:<br />
x ( t)<br />
= xˆ sin( ω 0t<br />
+ ϕ)<br />
Die Lösung enthält noch zwei freie Parameter, die Amplitude xˆ und den Nullphasenwinkel ϕ !<br />
Diese erhält man aus zwei zusätzlichen Informationen, den sog. Anfangsbedingungen oder<br />
Anregungsbedingungen x(t = 0) = x 0 und v(t = 0) = v 0 .<br />
Beispiel: Masse wird aus der Ruhelage ausgelenkt und zur Zeit t = 0 angestoßen.<br />
(Dabei wird dem System potentielle und kinetische Energie zugeführt)<br />
1. Anregungsbedingung: x ( t = 0) = x0<br />
2. Anregungsbedingung: x &( t = 0) = v0<br />
x ( 0) = x0 = xˆ<br />
sin( ϕ)<br />
x & t)<br />
= v = ˆ xω cos( ) ⇒<br />
( 0 0 ϕ<br />
2<br />
2<br />
2<br />
x 0 = xˆ<br />
sin ( ϕ)<br />
2 2 2<br />
0 0 ϕ<br />
v = ( ˆ xω ) cos ( ) ⇒<br />
ω0x<br />
tan( ϕ ) =<br />
v<br />
x ˆ = x +<br />
0<br />
v<br />
0<br />
2 0 2<br />
0 ( )<br />
ω0<br />
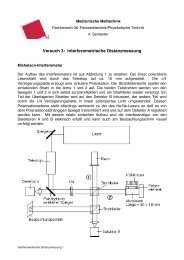
Die Messung der Federkonstante durch Messung der Schwingungsdauer bzw. Frequenz des<br />
entsprechenden Federpendels ist viel genauer als die statische Kraft-Messmethode (F = Dx).<br />
Diese Methode ist auch im atomaren Bereich anwendbar.<br />
1.1.2 Mathematisches Pendel (Fadenpendel)<br />
Punktförmige Masse m ist an einem masselosen Faden der Länge l aufgehängt.<br />
Bei Auslenkungen aus der Ruhelage entsteht eine rücktreibende Kraft.<br />
Rücktreibende Kraft (schwere Masse):<br />
FRück<br />
= −mS<br />
g sinϕ<br />
x = lϕ<br />
ϕ<br />
Newton (träge Masse):<br />
mT<br />
& x<br />
= −mS<br />
g sinϕ<br />
ml & ϕ = −mg sinϕ<br />
g<br />
& ϕ<br />
+ sin ϕ = 0 Nichtlineare DGL !<br />
l<br />
m<br />
F Rück<br />
F rad<br />
Linearisierung für kleine Auslenkungen: sinϕ = ϕ<br />
F = mg<br />
g<br />
& ϕ<br />
+ ϕ = 0 l<br />
2 g<br />
ω 0 = oder<br />
l<br />
T<br />
= 2π<br />
l<br />
g<br />
Schwingungsdauer ist unabhängig von der Masse !<br />
T<br />
2<br />
g<br />
Sekundenpendel: T = 2s ⇒ l = = 0,994 m<br />
2<br />
4π
Physik EI01 Schwingungen Seite<br />
1.1.3 Drehpendel<br />
11_Schwingungen_Einführung_BA.doc - 6/13<br />
Beim Drehpendel läuft die Drehachse A durch den Massenmittelpunkt eines starren Körpers.<br />
Die Ruhelage wird durch eine an der Drehachse befestigte Feder definiert.<br />
Rücktreibendes Moment:<br />
M Rück = −D*ϕ<br />
D* = Winkelrichtgröße<br />
rücktreibendesMoment<br />
D * =<br />
Drehwinkel<br />
Dynamisches Grundgesetz der Rotation<br />
J α = M Rück<br />
J & ϕ = −D*ϕ<br />
A<br />
ϕ<br />
r<br />
m<br />
Ruhelage<br />
D*<br />
& ϕ + ϕ = 0<br />
J<br />
2<br />
ω 0 =<br />
D*<br />
J<br />
Analogie: Translation - Rotation<br />
m → J<br />
a → α<br />
F → M<br />
D → D*<br />
Anwendung des Torsionspendels:<br />
Bestimmung des Trägheitsmoments von starren Körpern<br />
a) Symmetrischer starren Körper mit bekanntem J 0<br />
wird in Drehschwingungen versetzt.<br />
T 0 wird gemessen (D* bestimmbar).<br />
D*<br />
2π<br />
ω<br />
0<br />
= =<br />
J T<br />
0<br />
0<br />
Draht D*<br />
J 0<br />
b) Starrer Körper mit unbekanntem J x wird am Draht<br />
aufgehängt und schwingt um Schwerpunktsachse.<br />
T x wird gemessen<br />
D* 2π<br />
ω x = =<br />
J x Tx<br />
Division der beiden Gleichungen ergibt<br />
2<br />
J T<br />
Tx<br />
J x = J 0<br />
J<br />
T<br />
x x<br />
=<br />
0 T 0<br />
2<br />
0<br />
D*<br />
SP<br />
J x
Physik EI01 Schwingungen Seite<br />
1.1.4 Physisches Pendel (körperliches Pendel)<br />
Ein physisches Pendel ist ein beliebig geformter Körper, der um eine raumfeste Achse A<br />
schwingen kann.<br />
r r r<br />
Rücktreibendes Moment ( M = × F ):<br />
M Rück = −mgssinϕ<br />
( M Rück = D*⋅ϕ<br />
)<br />
Dynamisches Grundgesetz der Rotation<br />
J Aα<br />
= M Rück<br />
A<br />
s<br />
SP<br />
J A & ϕ = −mgs sinϕ<br />
Linearisierung für kleine Auslenkwinkel ϕ<br />
und J A = J S + ms 2 (Steinerscher Satz)<br />
mg<br />
mgs<br />
& ϕ + ϕ = 0 Bewegungsgleichung des physischen Pendels<br />
2<br />
J + ms<br />
S<br />
11_Schwingungen_Einführung_BA.doc - 7/13<br />
T<br />
Ph<br />
= 2π<br />
2<br />
J S + ms<br />
mgs<br />
ω<br />
0<br />
=<br />
J<br />
mgs<br />
S +<br />
ms<br />
2<br />
Reduzierte Pendellänge<br />
Ein entsprechendes Fadenpendel mit der gleichen Schwingungsdauer muss eine<br />
Fadenlänge von l r haben.<br />
T<br />
l<br />
r<br />
M<br />
= 2π<br />
lr<br />
g<br />
2<br />
J S + ms<br />
= Reduzierte Pendellänge<br />
ms<br />
Reversionspendel<br />
Eine Schwingung um eine zu A parallele Achse A’, im senkrechten Abstand l r , besitzt die gleiche<br />
Schwingungsdauer wie die Schwingung um die Achse A. Der Punkt im Abstand l r von A (durch den<br />
Schwerpunkt SP) heißt Schwingungsmittelpunkt oder Stoßmittelpunkt.<br />
s ' = lr − s<br />
J A ' J S + ms'<br />
T ' Ph = 2π<br />
= 2π<br />
mgs'<br />
mgs'<br />
2<br />
= 2π<br />
J<br />
S<br />
+ m<br />
mg(<br />
J + ms<br />
2<br />
(<br />
S<br />
ms<br />
J + ms<br />
2<br />
S<br />
ms<br />
− s)<br />
− s)<br />
2<br />
= T<br />
PH<br />
Mit dem Reversionspendel lässt sich die<br />
Gravitationskonstante g sehr genau bestimmen.<br />
(g = 9,80723129 in München)<br />
A<br />
s<br />
SP<br />
l r - s<br />
A’
Physik EI01 Schwingungen Seite<br />
11_Schwingungen_Einführung_BA.doc - 8/13<br />
1.1.5 Energie des harmonischen Oszillators<br />
Eine einfache Umformung der Bewegungsgleichung des Federpendels führt auf den Energiesatz.<br />
2<br />
d x<br />
m + Dx = 0<br />
2<br />
dt<br />
dv<br />
m + Dx = 0<br />
Multiplikation mit v liefert<br />
dt<br />
dv dx<br />
mv + Dx = 0<br />
dt dt<br />
d ⎛ m 2 ⎞ d ⎛ D 2 ⎞<br />
d ⎛ m 2 D 2 ⎞<br />
⎜ v ⎟ + ⎜ x ⎟ = 0 oder ⎜ v + x ⎟ = 0<br />
dt ⎝ 2 ⎠ dt ⎝ 2 ⎠<br />
dt ⎝ 2 2 ⎠<br />
Die letzte Gleichung ist gleichbedeutend mit dem Energieerhaltungssatz.<br />
Die Summe aus kinetischer Energie und potentieller Energie ist konstant.<br />
m 2 D 2<br />
W ges = v + x = const<br />
2 2<br />
Federpendel:<br />
x(<br />
t)<br />
xˆ sin( ω t)<br />
= 0<br />
2<br />
D = mω 0<br />
0 0<br />
v(<br />
t)<br />
= ω xˆ cos( ω t)<br />
W pot<br />
W kin<br />
D 2 D 2 2 mω<br />
( ) ˆ<br />
0 2<br />
= x t = x sin ( ω 0t)<br />
= xˆ<br />
sin<br />
2 2<br />
2<br />
m 2 m 2 2 2 D 2<br />
= v ( t)<br />
= ω 0 xˆ<br />
cos ( ω0t)<br />
= xˆ<br />
cos<br />
2 2<br />
2<br />
2<br />
2<br />
2<br />
( ω t)<br />
0<br />
( ω t)<br />
m 2 D 2<br />
W ges = vˆ<br />
= xˆ<br />
= const<br />
2 2<br />
Ein schwingungsfähiges System wandelt periodisch<br />
kinetische Energie in potentielle Energie um und umgekehrt.<br />
0<br />
x(t)<br />
W kin , W pot<br />
t<br />
t<br />
Die obige Ableitung der Energieerhaltung zeigt auch:<br />
In manchen Fällen ist es einfacher, die Bewegungsgleichung nicht mit dem Newtonschen<br />
Aktionsprinzip aufzustellen, sondern durch Ableitung des Energiesatzes.<br />
(in der theor. Mechanik ⇒ Lagrangegleichungen)<br />
Zusammenfassung<br />
• Harmonische Schwingungen treten immer beim linearem Kraftgesetz auf.<br />
• Sehr häufig in der Natur, da bei Störungen (z.B. elastischer Verformung) die rücktreibende<br />
Kraft immer proportional zur Auslenkung ist.<br />
• Anregung: a) auslenken → loslassen → W pot zuführen<br />
a) anstoßen → W kin zuführen<br />
a) auslenken und anstoßen → W pot + W kin zuführen
Physik EI01 Schwingungen Seite<br />
1.2 Freie, gedämpfte Schwingung<br />
11_Schwingungen_Einführung_BA.doc - 9/13<br />
Reale Schwingungen sind immer mit Reibungsverlusten verbunden. Die Schwingungsenergie<br />
wird durch Reibung verbraucht, d.h. Dissipation in Wärme.<br />
Da die potentielle Energie proportional zur Amplitude ist, nimmt die Amplitude ab.<br />
Beispiel: Reibung einer Kugel in einer Flüssigkeit<br />
“Schwingfall “Aperiodischer Grenzfall“ “Kriechfall“<br />
kleine Dämpfung<br />
große Dämpfung<br />
1.2.1 Geschwindigkeitsproportionale (viskose) Reibung<br />
Die Bewegungsgleichung (Differentialgleichung) erhält<br />
ein zusätzliches geschwindigkeitsproportionales<br />
Reibungsglied.<br />
F<br />
F<br />
Reib<br />
= −bx&<br />
= rx&<br />
(z.B. Stokesreibung)<br />
Reib −6πη<br />
b = Reibungskoeffizient<br />
v<br />
F Reib<br />
D<br />
Die Bewegungsgleichung lautet dann<br />
F = −Dx<br />
− bx&<br />
ang<br />
m & x<br />
= −Dx<br />
− bx&<br />
D b<br />
& x<br />
+ x + x&<br />
= 0<br />
m m<br />
F Reib<br />
v<br />
m<br />
x<br />
2 D b<br />
Mit den Abkürzungen ω 0 = und δ = erhält man die allgemeine Bewegungsgleichung<br />
m 2m<br />
2<br />
0 =<br />
& x<br />
+ 2δ&<br />
x + ω x 0 Bewegungsgleichung der viskos gedämpften Schwingung<br />
b<br />
δ =<br />
Abklingkonstante oder Dämpfungskonstante<br />
2m
Physik EI01 Schwingungen Seite<br />
Fallunterscheidungen:<br />
2<br />
2<br />
11_Schwingungen_Einführung_BA.doc - 10/13<br />
1. Fall: δ −ω0<br />
< 0 oder δ < ω0<br />
schwache Dämpfung gedämpfte Schwingung<br />
2<br />
2<br />
2. Fall: δ −ω0<br />
> 0 oder δ > ω0<br />
starke Dämpfung Kriechfall<br />
2<br />
2<br />
3. Fall: δ −ω0<br />
= 0 oder δ = ω0<br />
mittlere Dämpfung aperiodischer Grenzfall<br />
1. Fall: Schwingfall (schwache Dämpfung δ < ω0<br />
)<br />
Die Lösung der DGL ist:<br />
−δt<br />
x( t)<br />
= xe ˆ cos( ω t + ϕ)<br />
d<br />
x(t)<br />
wobei für die Frequenz gilt:<br />
ω<br />
2 2<br />
d = ω 0 −δ<br />
.<br />
t<br />
• Man erhält eine exponentiell gedämpfte Schwingung.<br />
• Die Frequenz der gedämpften Schwingung ist kleiner als die der ungedämpften Schwingung.<br />
Sie wird mit steigender Dämpfung immer kleiner.<br />
Die reellen Konstanten xˆ und ϕ werden aus den Anfangsbedingungen bestimmt.<br />
Häufig verwendet man den Dämpfungsgrad D.<br />
δ = D<br />
d = ω0 2<br />
ω 1 − D<br />
0<br />
ω ( = 1/ heißt Abklingzeit)<br />
Logarithmisches Dekrement<br />
Die Dämpfungskonstante lässt sich durch Vergleich zweier aufeinanderfolgender Amplituden im<br />
zeitlichen Abstand T d = 2/ d , leicht bestimmen. Der zeitliche Abstand zwischen zwei<br />
Amplitudenmaxima beträgt eine Schwingungsdauer T d = 2/ d . Man erhält:<br />
xˆ(<br />
t + Td<br />
) e<br />
=<br />
xˆ(<br />
t)<br />
e<br />
xˆ n + 1 −δT = e d<br />
xˆ<br />
n<br />
−δ<br />
( t+<br />
T )<br />
−δt<br />
d<br />
cos( ωd<br />
( t + Td<br />
)) −δT<br />
= e<br />
cos( ωdt)<br />
d<br />
oder<br />
Das Produkt T d bezeichnet man als logarithmisches Dekrement .<br />
xˆ<br />
n<br />
Λ = δ ⋅Td<br />
= ln<br />
xˆ<br />
n+<br />
1<br />
Λ = 1 bedeutet Amplitudenabfall auf 1/e innerhalb einer Periode.<br />
1/Λ ergibt die Anzahl der Perioden, bis die Amplitude auf 1/e abgeklungen ist.
Physik EI01 Schwingungen Seite<br />
2. Fall: Kriechfall (starke Dämpfung δ > ω0<br />
)<br />
11_Schwingungen_Einführung_BA.doc - 11/13<br />
Die allgemeine Lösung ergibt sich als Linearkombination von zwei exponentiell abfallenden<br />
Funktionen.<br />
x(t)<br />
x(<br />
t)<br />
= Ae ˆ<br />
( −δ<br />
−<br />
2 2<br />
δ −ω<br />
) t<br />
0<br />
+ Be ˆ<br />
( −δ<br />
+<br />
2 2<br />
δ −ω<br />
) t<br />
0<br />
Die “Schwingung“ besteht je nach<br />
Anregungsbedingung aus einem langsamen<br />
exponentiellen Abfall bzw. einer einzigen<br />
Auslenkung.<br />
t<br />
3. Fall: Aperiodischer Grenzfall ( δ = ω0<br />
)<br />
Die allgemeine Lösung lautet für δ = ω0<br />
:<br />
x t)<br />
=<br />
−δt<br />
( c + c t) e<br />
( 1 2<br />
x(t)<br />
Aperiodisch gedämpfte Schwingung<br />
Die “Schwingung“ besteht wie im Kriechfall aus einer<br />
einzigen Auslenkung mit einem exponentiellen Abfall.<br />
Sie strebt jedoch schneller gegen den Nullpunkt als im<br />
Kriechfall.<br />
t<br />
Darin liegt die Bedeutung der aperiodischen Dämpfung in der Technik.<br />
Die aperiodische Dämpfung ermöglicht die schnellste<br />
Dämpfung von unerwünschten Schwingungen.<br />
• Federung in Fahrzeugen<br />
• Messwerke in elektrischen Instrumenten<br />
• Tastkopf am Oszillographen
Physik EI01 Schwingungen Seite<br />
1.2.2 Konstante Reibungskraft<br />
11_Schwingungen_Einführung_BA.doc - 12/13<br />
Die Reibungskraft ist konstant und abhängig von der Geschwindigkeitsrichtung v .<br />
Bezeichnungen dafür sind:<br />
- trockene Reibung<br />
- Gleit- oder Rollreibung<br />
- äußere Reibung<br />
- Coulomb Dämpfung<br />
Da die Reibungskraft eine nichtkonservative Kraft ist (keine Funktion des Ortes - besitzt kein<br />
Potential), muss die Bewegung jeweils in Halbperioden zerlegt werden, wo sich die Masse m nach<br />
rechts bzw. nach links bewegt.<br />
D<br />
F Feder<br />
F Reibung<br />
v<br />
F Feder<br />
v<br />
F Reibung<br />
m<br />
x<br />
x<br />
1. Fall: Bewegung nach rechts( x& > 0 )<br />
r<br />
FReib<br />
= −F R<br />
m&<br />
x<br />
= ∑ Fang = −Dx<br />
− F R<br />
m&<br />
x&+<br />
Dx = −<br />
F R<br />
2. Fall: Bewegung nach links ( x& < 0 )<br />
r<br />
F Reib = +F R<br />
m & x<br />
= ∑ Fang = −Dx<br />
+ F R<br />
m & x&+<br />
Dx = +<br />
F R<br />
Lösung der DGL: allgemeine Lösung der homogenen DGL plus eine spezielle Lösung<br />
der inhomogenen DGL (siehe Federpendel im Schwerefeld)<br />
FR<br />
x( t)<br />
= xˆ sin( ω 0t<br />
+ ϕ)<br />
−<br />
D<br />
FR<br />
x( t)<br />
= xˆ sin( ω 0t<br />
+ ϕ)<br />
+<br />
D<br />
Die Gesamtschwingung setzt sich aus harmonischen Halbperioden um die<br />
Gleichgewichtslagen +F R /D und -F R /D zusammen.<br />
Die Schwingungsamplitude nimmt pro Halbperiode um 2F R /D ab.<br />
Die Frequenz bleibt konstant und ist ω 0 .<br />
x(t)<br />
t<br />
Aufgabe: Zeigen Sie, dass die Schwingung immer mit einer vollen Halbperiode endet !
Physik EI01 Schwingungen Seite<br />
11_Schwingungen_Einführung_BA.doc - 13<br />
FREIE, VISKOS GEDÄMPFTE SCHWINGUNG<br />
2<br />
0 =<br />
& x<br />
+ 2δ&<br />
x + ω x 0 Bewegungsgleichung<br />
b<br />
δ = Abklingkonstante<br />
2m<br />
2<br />
ω 0<br />
D<br />
=<br />
m<br />
Schwache Dämpfung:<br />
δ < ω 0<br />
Starke Dämpfung:<br />
δ > ω 0<br />
Aperiodischer Grenzfall<br />
δ = ω 0<br />
−δt<br />
x( t)<br />
= xe ˆ cos( ω t + ϕ)<br />
d<br />
x(<br />
t)<br />
= Ae ˆ<br />
( −δ<br />
−<br />
2 2<br />
δ −ω<br />
) t<br />
0<br />
+ Be ˆ<br />
( −δ<br />
+<br />
2 2<br />
δ −ω<br />
) t<br />
0<br />
x(<br />
t)<br />
−δt<br />
( c + c t) e<br />
= 1 2<br />
ω<br />
2 2<br />
d = ω 0 −δ<br />
.<br />
x(t)<br />
Die “Schwingung“ besteht je nach<br />
Anregungsbedingung aus einem langsamen<br />
exponentiellen Abfall bzw. einer einzigen<br />
Auslenkung.<br />
Die “Schwingung“ besteht wie im Kriechfall<br />
aus einer einzigen Auslenkung mit einem<br />
exponentiellen Abfall. Sie strebt jedoch<br />
schneller gegen den Nullpunkt als im<br />
Kriechfall<br />
x(t)<br />
x(t)<br />
t<br />
t<br />
t<br />
logarithmisches Dekrement:.<br />
xˆ<br />
n<br />
Λ = δ ⋅Td<br />
= ln<br />
xˆ<br />
n+<br />
1<br />
Bedingung für Nulldurchgang:<br />
2 2<br />
0 < ( −δ<br />
− δ −ω0<br />
)<br />
x&<br />
( t = 0) = v<br />
x<br />
0<br />
Bedingung für Nulldurchgang:<br />
v < −δ<br />
0 x 0