Theoretische Physik B Gehört bei Prof. Dr. Kühn KIT - Karlsruher ...
Theoretische Physik B Gehört bei Prof. Dr. Kühn KIT - Karlsruher ...
Theoretische Physik B Gehört bei Prof. Dr. Kühn KIT - Karlsruher ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Theoretische</strong> <strong>Physik</strong> B<br />
<strong>Gehört</strong> <strong>bei</strong> <strong>Prof</strong>. <strong>Dr</strong>. <strong>Kühn</strong><br />
<strong>KIT</strong> - <strong>Karlsruher</strong> Institut für Technologie<br />
Sommersemester 2011<br />
Mitschriebe ausgear<strong>bei</strong>tet von<br />
Philipp Basler, Nils Braun, Larissa Bauer<br />
16. Juli 2011
Inhaltsverzeichnis<br />
1 Variationsprinzipien 5<br />
1.1 Einfache Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5<br />
1.2 Euler Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8<br />
1.3 Lösungsstrategien unter speziellen Annahmen für F(y,y’,x) . . . . . . . . . 9<br />
2 Euler-Lagrange-Gleichungen und Hamiltonsches Prinzip 13<br />
2.1 Koordinatenwahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2.2 Euler-Lagrange Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.3 Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
3 Symmetrieprinzipien 19<br />
3.1 Mechanische Ähnlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19<br />
3.2 Symmetrien ⇐⇒ Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . 21<br />
4 Schwingungen eines Systems <strong>bei</strong> kleinen Auslenkungen 25<br />
4.1 Eigenfrequenzen und Eigenmoden . . . . . . . . . . . . . . . . . . . . . . . 25<br />
4.2 Normalkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28<br />
4.3 Anharmonische Schwingungen . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
5 Hamilton-Formalismus kanonischer Gleichungen/ Poisson-Klammern 39<br />
5.1 Struktur der Mechanik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39<br />
6 Starrer Körper ( Kreisel ) 49<br />
6.1 Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49<br />
6.2 Trägheitstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53<br />
6.3 <strong>Dr</strong>ehimpuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55<br />
6.4 Symmetrische Kräftefreie Kreisel . . . . . . . . . . . . . . . . . . . . . . . 57<br />
3
4 INHALTSVERZEICHNIS<br />
6.5 Bewegungsgleichung des starren Körpers . . . . . . . . . . . . . . . . . . . 58<br />
7 Anhang 67<br />
7.1 Literaturempfehlungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Kapitel 1<br />
Variationsprinzipien<br />
1.1 Einfache Beispiele<br />
Bestimme Bewegung oder Gestalt eines Systems so, dass ein Integral minimiert wird.<br />
Bsp: Finde den schnellsten Weg von einem Punkt auf dem Land zu einem Punkt auf dem<br />
Wasser (Bewegungsgeschwindigkeit im Wasser ist niedriger) → Weg hat einen Knick an<br />
der Küste<br />
Land (v 1 )<br />
Wasser (v 2 )<br />
Θ 2<br />
Θ 1<br />
y 1<br />
Θ 1<br />
x 1 x 2<br />
y<br />
y 2<br />
y 1<br />
√ √<br />
x<br />
Laufzeit T = (<br />
2 1 +y2 1<br />
v 1<br />
+<br />
Abbildung 1.1: Weg über Land und durch Wasser<br />
x 2 2 +y2 2<br />
v 2<br />
), wo<strong>bei</strong> y 1 + y 2 = y fest, ebenso x 1 , x 2 fest.<br />
0 = δy − δy 1 + δy 2 Suche den Weg, für den T minimal wird.<br />
Extremum:<br />
( √<br />
d x<br />
2<br />
0 = δT =<br />
1 + y1<br />
2 · δy 1 + d<br />
√ )<br />
x<br />
2<br />
2 + y2<br />
2<br />
dy 1 v 1 dy 2 v 2<br />
5
6 KAPITEL 1. VARIATIONSPRINZIPIEN<br />
⎛<br />
⎞<br />
0 =<br />
y 1<br />
⎜√ · 1 y<br />
− √ 2<br />
· 1<br />
⎝ x<br />
2<br />
1 + y1<br />
2 v 1 x<br />
2<br />
} {{ }<br />
2 + y2<br />
2 v 2<br />
⎟<br />
⎠ δy 1<br />
} {{ }<br />
sin(θ 1 sin(θ 2 )<br />
sin(θ 1 )<br />
v 1<br />
= sin(θ 2)<br />
v 2<br />
1.1.1 v hänge kontinuierlich von x ab<br />
y<br />
y(x)<br />
B(x B , y B )<br />
A<br />
x A =y A =0<br />
x B<br />
x<br />
Abbildung 1.2: Bahnkurve von A nach B<br />
Bahnkurve y(x) mit y(0) = 0, y(x B ) = y B<br />
Laufzeit von A nach B :<br />
Wegstück Länge ds = √ √<br />
dx 2 + dy 2 = 1 + ( dy 2dx<br />
dx)<br />
Allgemeiner berechnet sich das Wegstück in den Koordinaten k i als<br />
d⃗s = ∑ i<br />
∂⃗r<br />
∂k i<br />
dk i<br />
Somit ergibt sich für den Betrag :<br />
ds = |d⃗s| = √ ∑ i<br />
∣ ∂⃗r ∣∣∣<br />
2<br />
∣ (dk i )<br />
∂k 2<br />
i
1.1. EINFACHE BEISPIELE 7<br />
x∫<br />
B<br />
(√<br />
dT = dx<br />
A x A<br />
T [y] : Funktional .<br />
dT = ds<br />
v(x) , T = B∫<br />
Suche Minimum : lokal vs global<br />
1+y ′2<br />
v(x)<br />
)<br />
T [y] =<br />
∫x B<br />
x A<br />
dx<br />
(√ )<br />
1 + y<br />
′2<br />
v(x)<br />
1.1.2 Verallgemeinert<br />
Geschwindigkeit hängt ab von x, y und von der Richtung<br />
(dT ) 2 = f xx (x, y)(dx) 2 + f x,y (x, y)dxdy + f yx (x, y)dydx + f yy (x, y)(dy) 2 = ∑ i,j<br />
f ij (x i )dx i dx j<br />
(f ij ist Metrik)<br />
Bahnkurve x i (s) mit Bahnparameter s<br />
T = ∫ √ ∑ (<br />
)<br />
f ij (x i ) dx i dx j<br />
ds ds<br />
i,j<br />
Bahn mit kürzester Laufzeit : Geodäte zu Metrik f ij<br />
1.1.3 Brachystochrone<br />
Auf welcher Bahn gleitet (ohne Reibung) ein Massenpunkt in kürzester Zeit von A nach B<br />
y<br />
A<br />
x A =y A =0<br />
(x B ,y B =y(x B ))<br />
B x<br />
Abbildung 1.3: Gleitbahn ohne Reibung von A nach B<br />
Geschwindigkeit mv2<br />
2<br />
+ U(y) = 0<br />
pot. Energie U(y) = mgy =⇒ v = √ −2gy<br />
Weglänge ds 2 = dx 2 + dy 2 = dx 2 (1 + y ′2 )<br />
dT = ds<br />
v
8 KAPITEL 1. VARIATIONSPRINZIPIEN<br />
T [y] =<br />
∫x B<br />
0<br />
dx<br />
√<br />
1 + y<br />
′2<br />
√ −2gy<br />
1.2 Euler Gleichung<br />
y<br />
y(x)<br />
B<br />
A<br />
y(x)+δy(x)<br />
Abbildung 1.4: Bahnkurve von A nach B mit kleiner Änderung<br />
x<br />
Bahnkurve y(x) kleine Änderung δy(x)<br />
∫x 2<br />
Funktional J(y) = dxf(y, y ′ , x)<br />
x 1<br />
Forderungen suche y(x), so dass J(y) extremal wird. =⇒ J ändert sich nicht, wenn man<br />
y(x) durch y(x) + δy(x) ersetzt.<br />
Randpunkte bleiben fest : δy(x 1 ) = δy(x 2 ) = 0<br />
∫x 2<br />
∫<br />
J(y + δy) = dxf ((y(x) + δy(x)), (y ′ (x) + δy ′ x 2 (<br />
)<br />
(x)), x) = dx f + ∂ fδy + ∂ fδy ′ ∂y ∂y ′<br />
x 1 x 1<br />
∫x 2 (<br />
δJ ≡ J(y+δy)−J(y) = dx<br />
x 1<br />
0 = δJ =<br />
∫x 2 (<br />
∂y<br />
− d ∂f<br />
∂f dx<br />
x 1<br />
Definition<br />
∂y ′ )<br />
δy(x)<br />
∂<br />
fδy + ∂ f · d<br />
∂y ∂y ′<br />
) δy ∫x 2 (<br />
= dx<br />
dx<br />
x 1<br />
∂<br />
fδy − d<br />
∂y dx<br />
∂<br />
fδy<br />
∂y ′<br />
)<br />
+ ∂y′<br />
∂f δy|x 2<br />
x 1<br />
Euler-Gleichung<br />
∂f<br />
∂y − d ∂f<br />
= 0<br />
dx ∂y ′
1.3. LÖSUNGSSTRATEGIEN UNTER SPEZIELLEN ANNAHMEN FÜR F(Y,Y’,X) 9<br />
DGL 2ten Grades für y(x)<br />
analog :<br />
Mehrere Funktionen von x : y i (x)<br />
∫x 2<br />
J(y i ) = dxf((y 1 , . . . , y i ), (y 1, ′ . . . , y i), ′ x)<br />
x 1<br />
via partielle Integration<br />
∫ x 2<br />
x 1<br />
∑<br />
i<br />
δJ(y i ) = 0<br />
[ ∂f<br />
− d<br />
∂y i dx<br />
]<br />
∂f<br />
δy i = 0<br />
∂y i<br />
Jedes δy i kann unabhängig variiert werden. Daraus ergibt sich :<br />
∂f<br />
− d<br />
∂y i dx<br />
∂f<br />
∂y ′ i<br />
= 0<br />
Was wieder eine DGL 2ten Grades ist.<br />
1.3 Lösungsstrategien unter speziellen Annahmen für<br />
F(y,y’,x)<br />
(a) Keine y-Abhängigkeit ⇐⇒<br />
Euler - Gleichung :<br />
Durch Integrieren ergibt sich :<br />
∂F<br />
∂y = 0<br />
d ∂F<br />
= ∂F<br />
dx ∂y ′ ∂y = 0<br />
∂F<br />
∂y ′ = const<br />
Auflösen der Gleichung nach y ′ liefert eine DGL erster Ordnung.<br />
Beispiel: Weg von A(x A , y A ) nach B(x B , y B ) mit der Geschwindigkeit hängt nur ab<br />
von x und nicht von y<br />
T =<br />
∫x B<br />
x A<br />
√<br />
1 + y<br />
′2<br />
dx<br />
v(x)<br />
} {{ }<br />
F (y,y ′ ,x)
10 KAPITEL 1. VARIATIONSPRINZIPIEN<br />
d ∂F<br />
dx ∂y ′<br />
( )<br />
= d √ y′ 1<br />
dx 1+y ′2 v(x)<br />
=⇒ y′ √1+y ′2 1<br />
v(x) = c<br />
y ′ (x) =<br />
√<br />
v2 (x)c 2<br />
1 − v 2 c 2 = tan θ<br />
1<br />
(v 2 c 2 ) 1/2<br />
Θ<br />
(1-v 2 c 2 ) 1/2<br />
y<br />
Abbildung 1.5: Steigungsdreieck für y<br />
B<br />
Θ<br />
A<br />
x<br />
Abbildung 1.6: Bahnkurve mit Steigungsdreieck<br />
y(x) =<br />
∫x B<br />
x A<br />
dxy ′ =<br />
(b) F hängt nicht explizit ab von x<br />
∫x B<br />
x A<br />
⇐⇒ ∂F<br />
∂x = 0<br />
√<br />
v2 (x)c<br />
dx<br />
2<br />
1 − v 2 c + a 2<br />
Zeige, dass<br />
Beweis:<br />
[ ]<br />
d ∂F<br />
dx ∂y ′ y′ − F = − ∂F<br />
∂x
1.3. LÖSUNGSSTRATEGIEN UNTER SPEZIELLEN ANNAHMEN FÜR F(Y,Y’,X) 11<br />
[(<br />
]<br />
y ′ + ∂F y ′′ −<br />
∂y ′<br />
Verwende d ∂F<br />
)<br />
d ∂F<br />
dx ∂y ′<br />
dx ∂y ′<br />
=⇒ = − ∂F<br />
∂x<br />
also, falls ∂F<br />
∂x = 0<br />
= ∂F<br />
∂y<br />
[<br />
]<br />
∂F<br />
∂y y′ + ∂F y ′′ + ∂F<br />
∂y ′ ∂x<br />
∂F<br />
∂y ′ y′ − F = c<br />
Auflösen nach y ′ ergibt eine DGL erste Ordnung.<br />
Beispiel : Brachistochrone √<br />
:<br />
F (y, y ′ 1+y<br />
) = √ ′2<br />
−2gy<br />
=⇒ 1 = c 2 (−2g)y(1 + y ′2 )<br />
[ ] −<br />
1<br />
1<br />
dx = − 1 2<br />
dy<br />
c 2 (−2g)y<br />
Ansatz :<br />
y = −a(1 − cos(τ))<br />
x = a(τ − sin(τ))
12 KAPITEL 1. VARIATIONSPRINZIPIEN
Kapitel 2<br />
Euler-Lagrange-Gleichungen und<br />
Hamiltonsches Prinzip<br />
2.1 Koordinatenwahl<br />
Es seien ⃗r 1 , . . . , ⃗r n kartesische Koordinaten von N Massenpunkten. Es gelten ferner k<br />
Zwangsbedingungen<br />
f 1 (⃗r 1 , . . . , ⃗r n , t) = 0<br />
. =<br />
.<br />
f k (⃗r 1 , . . . , ⃗r n , t) = 0<br />
Beispiel:<br />
Zwei Teilchen ⃗r 1 , ⃗r 2 und |⃗r 1 − ⃗r 2 | = d sei fest (Erste Zwangsbedingung)<br />
Dann hat das System 3N − k Freiheitsgrade. Die 3N − k Zahlen, die die Lage im System<br />
festlegen, heißen generalisierte Koordinaten<br />
⃗r 1 = ⃗r 1 (q 1 , . . . , q 3N−k , t)<br />
.<br />
.<br />
⃗r N = ⃗r N (q 1 , . . . , q 3N−k , t)<br />
Beispiele: Doppelpendel in einer Ebene<br />
13
14KAPITEL 2. EULER-LAGRANGE-GLEICHUNGEN UND HAMILTONSCHES PRINZIP<br />
m 1<br />
m 2<br />
Θ 1<br />
Θ 2<br />
Abbildung 2.1: Doppelpendel<br />
2.2 Euler-Lagrange Gleichung<br />
eine Koordinate q<br />
Wirkung<br />
S = S[q] =<br />
∫ t 2<br />
L(q, ˙q, t) dt<br />
L fällt vom Himmel, L als Funktion von q, ˙q und t<br />
t 1<br />
Forderung : Suche q(t), so dass S[q] extremal (minimal) wird. q(t 1 ) und q(t 2 ) liegen fest<br />
r<br />
ωt<br />
<strong>Dr</strong>aht<br />
∫t 2<br />
δS[q] = 0 =⇒ 0 = dt<br />
t 1<br />
∫t 2 (<br />
∂L<br />
dt − d ∂q dt<br />
t 1<br />
Da ∂Lδq∣<br />
∣ t 2<br />
∂ ˙q t 1<br />
= 0 folgt<br />
Definition<br />
)<br />
∂L<br />
δq + ∂Lδq∣<br />
∣ t 2<br />
∂ ˙q ∂ ˙q t 1<br />
(<br />
)<br />
∂L<br />
δq − d ∂L<br />
δ ˙q ∂q dt ∂ ˙q<br />
Verallgemeinerung der Kraft<br />
∂L<br />
∂q − d ∂L<br />
dt ∂ ˙q = 0
2.3. ERHALTUNGSSÄTZE 15<br />
Für n verallgemeinete Koordinaten hat man L((q 1 , . . . , q n ), ( ˙q 1 , . . . , ˙q n ), t) und somit<br />
∫ t 2<br />
S[q i ] = dtL<br />
t 1<br />
Variation der unabhängigen q i =⇒ n DGL :<br />
∂L<br />
− d ∂L<br />
= 0<br />
∂q i dt ∂ ˙q i<br />
2.3 Erhaltungssätze<br />
2.3.1 Definition<br />
Zyklische Variablen (Vgl I.3.a)<br />
Falls L unabhängig ist von einer verallgemeinerter Koordinaten q i , d.h. ∂L<br />
∂q i<br />
= 0,<br />
dann nennt man q i zyklisch. ∂L<br />
∂q i<br />
= 0 =⇒ d ∂L<br />
dt ∂ ˙q i<br />
= 0<br />
Also<br />
∂L<br />
= zeitliche Konstante<br />
∂ ˙q i<br />
Suche nach zyklischer Variable durch geeignete Koordinatentransformation<br />
2.3.2 Energieerhaltung (Vgl I.3.b)<br />
[<br />
∂L<br />
]<br />
d<br />
Betrachte : ˙q − L =<br />
dt ∂ ˙q<br />
Bei mehreren Koordinaten:<br />
(<br />
d<br />
dt<br />
)<br />
∂L<br />
˙q + ∂L<br />
∂ ˙q<br />
∂L<br />
∂q<br />
(<br />
¨q − ∂ ˙q<br />
[ ]<br />
d ∂L<br />
˙q i − L<br />
dt ∂ ˙q i<br />
˙q +<br />
∂L<br />
∂ ˙q<br />
= − ∂L<br />
∂t<br />
[ ]<br />
Falls ∂L = 0 =⇒ ∂L<br />
∂t ∂ ˙q i<br />
˙q i − L = zeitkliche Konstante ≡ E<br />
∂L<br />
∂ ˙q ˙q − L = E<br />
)<br />
∂L ¨q + = − ∂L<br />
∂t ∂t
16KAPITEL 2. EULER-LAGRANGE-GLEICHUNGEN UND HAMILTONSCHES PRINZIP<br />
Dies ist eine Differentialgleichung erster Ordnung.<br />
Auflösung nach ˙q und Trennung der Variablen ergibt ein gewöhnliches Integral<br />
Test: falls L = 1 2 m ˙q2 − U(q) =⇒ ∂L<br />
∂ ˙q − L = 1 2 m ˙q2 + U(q)<br />
2.3.3 Beispiele<br />
(a) kinetische Energie T eines freien Teilchens<br />
(1) kartesische Koordinaten T = m ˙⃗x 2 = m 2 2 (ẋ2 + ẏ 2 + ż 2 )<br />
⎛ ⎞<br />
ρ cos φ<br />
⎜ ⎟<br />
(2) Zylinderkoordinaten ⃗r = ⎝ρ sin φ⎠<br />
⎛<br />
˙ρ cos φ − ρ ˙φ<br />
⎞<br />
sin φ<br />
⎜ ˙⃗r = ⎝ ˙ρ sin φ + ρ ˙φ ⎟<br />
cos φ⎠<br />
T = m 2 ( ˙ρ2 + ρ 2 ˙φ2 + ż 2 )<br />
ż<br />
(3) Kugelkoordinaten T = m 2 (ṙ2 + r 2 ˙θ2 + r 2 sin 2 θ ˙φ 2 )<br />
(b) Zwangsbedingungen (ohne Potential)<br />
Da U = 0 =⇒ L ≡ T<br />
(1) Bewegungen auf Zylinder und ρ = const =⇒ ˙ρ = 0<br />
z<br />
L = T = m 2 (ρ2 ˙φ2 + ż 2 )<br />
Es gibt also zwei zyklische Koordinaten (z und φ).<br />
d<br />
dt mρ2 ˙φ2 = 0. Daraus ergibt sich die Erhaltung des <strong>Dr</strong>ehimpulses<br />
d<br />
mż = 0 =⇒ Erhaltung der z−Komponente des Impulses<br />
dt ⎧<br />
⎨ ˙φ = const<br />
Schraubenbewegung<br />
⎩ż = const<br />
(2) Bewegung auf Kugeloberfläche ṙ = 0<br />
L = T = m 2 = m 2 r2 ( ˙θ 2 + sin 2 (θ) ˙φ 2 )<br />
φ ist zyklisch,<br />
d<br />
dt<br />
∂L<br />
∂ ˙q = d dt (mr2 sin 2 (θ) ˙φ)<br />
mr 2 sin 2 (θ) ˙φ = const ≡ L z
2.3. ERHALTUNGSSÄTZE 17<br />
Bewegungsgleichung für θ<br />
d<br />
dt (mr2 ˙θ2 ) − mr 2 sin θ cos θ ˙φ 2 = 0<br />
Mit ˙φ = ergibt sich eine Differentialgleichung zweiter Ordnung für θ<br />
L z<br />
mr 2 sin 2 (θ)<br />
oder wegen ∂T<br />
∂t = 0 ergibt sich hier d dt T = 0<br />
mr 2 ( ˙θ 2 + sin 2 (θ) ˙φ 2 ) = E<br />
˙φ einsetzen und nach ˙θ auflösen<br />
(3) Kegelmantel<br />
θ = θ 0 = const<br />
(c) Bewegung mit Zwangsbedingung und Potential U speziell U = mgz<br />
Ansatz<br />
L = T − U<br />
analog zu vorher, aber U(q) wird ausgedrückt durch die passenden Koordinaten<br />
Beispiel: sphärisches Pendel ( Fadenpendel)<br />
U = −mgl cos θ, hier z = −r cos θ<br />
Θ<br />
l<br />
m<br />
Abbildung 2.2: Fadenpendel<br />
L = ml2<br />
2 ( ˙θ 2 + sin 2 θ ˙φ 2 ) + mgl cos θ
18KAPITEL 2. EULER-LAGRANGE-GLEICHUNGEN UND HAMILTONSCHES PRINZIP<br />
∂L<br />
∂t<br />
∂L<br />
= 0 =⇒ ˙θ<br />
∂ ˙θ + ∂L ˙φ<br />
∂ ˙φ − L = zeitliche Konstante E<br />
ml 2<br />
Da φ zyklisch ist : L z = ∂L = const<br />
∂ ˙φ<br />
2 ( ˙θ 2 + sin 2 (θ) ˙φ 2 ) − mgl cos θ = E<br />
L z = ml 2 sin 2 (θ) ˙φ<br />
Einsetzen in die obige Gleichung und auflösen nach ˙θ ergibt<br />
˙θ 2 = 2 (E + mgl cos θ − 1 )<br />
L 2 z<br />
ml 2 2 m sin 2 (θ)<br />
dθ<br />
√<br />
2<br />
ml 2 (E + mgl cos θ − 1 2<br />
(d) Bewegung mit zeitabhängigen Zwangsbedinungen<br />
L 2 z<br />
m sin 2 (θ)<br />
) = dt<br />
Teilchen frei beweglich auf rotierendem Stab T = m 2 (ṙ2 + r 2 ˙φ2 ), φ = ωt als Zwangsbedingung<br />
, r ist verallgemeinterte Koordinate<br />
T = m 2 (ṙ2 + r 2 ω 2 )
Kapitel 3<br />
Symmetrieprinzipien<br />
Löse Probleme ohne zu rechnen<br />
3.1 Mechanische Ähnlichkeit<br />
3.1.1 Allgemeine Betrachtungen<br />
Mutliplikation von L mit konstanten Faktoren ändert die Bewegungsgleichung nicht.<br />
Betrachte Potential U, welches eine homogene Funktion der Koordinaten ist, d.h.:<br />
z.B.: U =<br />
∑<br />
i,j,i≠j<br />
− m im j G<br />
|⃗r i −⃗r j |<br />
U(α⃗r 1 , . . . , α⃗r n ) = α k U(⃗r 1 , . . . , ⃗r n )<br />
=⇒ k = −1<br />
oder U = ∑ κ ij (⃗r i − ⃗r j ) 2 =⇒ k = 2<br />
i,j<br />
Betrachte Transformation : ⃗r i → ⃗r i ⋆ = α⃗r i , t → t ⋆ = βt<br />
deshalb<br />
d⃗r<br />
dt → d⃗r⋆<br />
dt = α d⃗r<br />
⋆ β dt<br />
Potentielle Energie : U →<br />
(<br />
U ⋆ )<br />
= α k U<br />
2<br />
Wähle β passend, so dass = α k , also β = α 1− k 2<br />
α<br />
β<br />
( ) 2 α<br />
=⇒ T → T ⋆ = T<br />
β<br />
} {{ }<br />
kinetische Energie<br />
Unter der Transformation ⃗r i → ⃗r ⋆ i = α⃗r i und t → t ⋆ = α 1− k 2 t erhält L den Faktor α k und<br />
die Bewegungsgleichungen für ⃗r ⋆ , t ⋆ ist identisch zu denen für ⃗r, t<br />
=⇒ Wenn ⃗r i (t) eine Lösung der Bewegungsgleichung ist, dann auch α⃗r(α 1− k 2 t)<br />
19
20 KAPITEL 3. SYMMETRIEPRINZIPIEN<br />
Im Skalenverhältnis für l ⋆ : l = α sind ähnliche Bahnen erlaubt.Die Laufzeiten zwischen<br />
entsprechenden Bahnpunkten verhalten sich wie<br />
3.1.2 Virialsatz<br />
t ⋆ t = ( l<br />
⋆<br />
l<br />
) 1−<br />
k<br />
2<br />
Zusammenhang zwischen zeitlichem Mittel von kinetischer Energie und potentieller Energie.<br />
Betrachte Teilchen ohne Zwangsbedingung in kartesischen Koordinaten.<br />
Definiere: G = ∑ i<br />
Es gilt :<br />
⃗p i ⃗r i<br />
d<br />
dt G = ∑ i<br />
⃗p i ˙⃗ri + ∑ i<br />
Definiere den zeitlichen Mittelwert einer Größe F (t)<br />
⃗p⃗r ˙ i i = 2 ∑ m i<br />
2 ˙⃗r i<br />
2 + ∑<br />
i<br />
i<br />
} {{ }<br />
T<br />
⃗F i ⃗r i<br />
∫<br />
1<br />
τ<br />
〈F (t)〉 = lim dtF (t)<br />
τ→∞ τ<br />
0<br />
Speziell:<br />
Annahme: Es sei<br />
〈 d ∫<br />
1<br />
τ<br />
G(t)〉 = lim dt d 1<br />
G(t) = lim (G(τ) − G(0))<br />
dt τ→∞ τ dt τ→∞ τ<br />
0<br />
(a) entweder die Bewegung periodisch, dann wählen wir τ entsprechend der Wiederkehrzeit.<br />
G(0) = G(τ) = G(2τ) = . . .<br />
(b) oder es sind |⃗p i | und |⃗r i | beschränkt, dann ist auch G(t) beschränkt<br />
In <strong>bei</strong>den Fällen gilt dann 〈 d G(t)〉 = lim (G(τ) − G(0)) = 0 =⇒ 〈2T + ∑ ⃗F<br />
dt i ⃗r i 〉 = 0<br />
τ→∞ i<br />
Annahme: F ⃗ i sei aus dem Potential U(⃗r 1 , . . . , ⃗r n ) gewonnen , also F ⃗ i = −∇ ⃗ i U<br />
2〈T 〉 =<br />
〈 ∑<br />
i<br />
( ⃗ ∇ i U(⃗r 1 , . . . , ⃗r n )⃗r i<br />
〉
3.2. SYMMETRIEN ⇐⇒ ERHALTUNGSSÄTZE 21<br />
Eulersches Theorem<br />
Annahme : U sei homogene Funktion vom Grad k<br />
∑<br />
( ∇ ⃗ i U)⃗r i = kU<br />
i<br />
Somit gilt für homogene U<br />
〈T 〉 = k 2 〈U〉<br />
Beispiele:<br />
(a) k = −1 =⇒ Galaxienhaufen<br />
(b) k = 2 =⇒ Harmonischer Oszillator<br />
3.2 Symmetrien ⇐⇒ Erhaltungssätze<br />
3.2.1 Motivation<br />
Energieerhaltung vs ∂L<br />
∂t = 0<br />
L ist invariant unter t → t ′ = t + ε<br />
3.2.2 Zyklische Koordinate<br />
∂L<br />
∂L<br />
= 0 =⇒ ist erhalten<br />
∂q ∂ ˙q<br />
Frage : Kann der Zusammenhang zwischen Erhaltungsgröße und Invarianz ohne Bezug auf<br />
Koordinatensystem formuliert werden?<br />
3.2.3 Noethertheorem<br />
Invarianz von S[q i ] : q i sei Lösung der Euler-Lagrange-Gleichung<br />
Es gebe eine Transformation :<br />
( ) (<br />
)<br />
q i qi ⋆ = q i + εψ i (q j , ˙q j , t)<br />
T : →<br />
t t ⋆ = t + εϕ(q j , ˙q j , t)
22 KAPITEL 3. SYMMETRIEPRINZIPIEN<br />
Wo<strong>bei</strong> ε infinitesimal klein sei.<br />
Vergleiche S[q i (t)] (Randwerte t 1 , t 2 ) und S[q ⋆ i (t ⋆ )] (Randwerte t ⋆ 1, t ⋆ 2)<br />
Satz<br />
Noethertheorem<br />
Sei S[q i (t)] = S[q ⋆ i (t ⋆ )] mit<br />
( ) (<br />
)<br />
q i qi ⋆ = q i + εψ i (q j , ˙q j , t)<br />
T : →<br />
t t ⋆ = t + εϕ(q j , ˙q j , t)<br />
Dann nennen wir S invariant unter T . Es liegt eine Symmetrie vor =⇒ Es gibt<br />
eine Erhaltungsgröße Q mit<br />
Q(q i , ˙q i , t) = ∑ i<br />
( ) (<br />
∂L<br />
ψ i + L − ∑ ∂ ˙q i<br />
i<br />
)<br />
∂L<br />
˙q i ϕ<br />
∂ ˙q i<br />
und<br />
d<br />
dt Q = 0<br />
Beispiele<br />
(a) Zeitinvarianz =⇒ ψ = 0, ϕ = 1<br />
∑<br />
Q = L − N ∂L<br />
∂ ˙⃗r<br />
˙⃗ri<br />
i<br />
i=1<br />
Laut Eulertheorem ist N ∑<br />
i=1<br />
∑<br />
∂L<br />
∂ ˙⃗r<br />
˙⃗ri = N ∂T<br />
i ∂ ˙⃗r<br />
˙⃗ri = 2T<br />
i<br />
i=1<br />
Somit ist Q = T − U − 2T = −(T + U), also ist nacht Noethertheorem d (T + U) =<br />
dt<br />
d<br />
E = 0 =⇒ Energieerhaltung<br />
dt<br />
(b) L(q i , ˙q i , t) sei unabhängig von q j .<br />
Wähle ψ = δ ij , ϕ = 0 =⇒ Q = ∂L<br />
∂ ˙q j<br />
(c) Zwei Variablen q x , q y und L sei von der Form L = m 2 ( ˙q2 x + ˙q 2 y) − U(q 2 x + q 2 y)
3.2. SYMMETRIEN ⇐⇒ ERHALTUNGSSÄTZE 23<br />
⎛ ⎞ ⎛<br />
⎞<br />
q x qx ⋆ = q x + εq y<br />
⎜ ⎟ ⎜<br />
Transformation ⎝q y ⎠ → ⎝qy ⋆ ⎟<br />
= q y − εq x ⎠ =⇒<br />
t<br />
t ⋆ = 0<br />
⎛ ⎞<br />
ψ x = q y<br />
⎜ ⎟<br />
⎝ψ y = −q x ⎠<br />
ϕ = 0<br />
Also Q = m( ˙q x q y − ˙q y q x ) = ⃗ L z . Somit folgt <strong>Dr</strong>ehimpulserhaltung in z Richtung<br />
3.2.4 Beweis des Noethertheorems<br />
( ) (<br />
)<br />
q i qi ⋆ = q i + εψ i (q j , ˙q j , t)<br />
S[q] ist invariant unter T : →<br />
t t ⋆ = t + εϕ(q j , ˙q j , t)<br />
S[q] = S[q ⋆ ] mit den Randwerten t ⋆ 1, t ⋆ 2<br />
∫t ⋆ 2<br />
∫t 2<br />
Beweis: dt ⋆ L(q ⋆ , dq⋆ , t ⋆ ) = dtL(q, dq , t)<br />
dt ⋆ dt<br />
t ⋆ 1<br />
t 1<br />
Für die linke Seite mit Variablentrasformation t ⋆ als Funktion von t<br />
∫<br />
t 2<br />
t 1<br />
dt ( dt ⋆<br />
dt L(q⋆ , dq⋆<br />
=⇒<br />
∫t 2<br />
t 1<br />
dt d dt<br />
Für alle q, t =⇒<br />
dt ⋆ , t ⋆ ) ) =<br />
( dt ⋆<br />
dt L(q⋆ , dq⋆<br />
d<br />
dε<br />
∫<br />
Taylor<br />
t 2<br />
dt ( L(q, dq , t))) + ε d dt dε<br />
t 1<br />
, t ⋆ ) ) ∣ dt ⋆ ε=0<br />
= 0<br />
( dt ⋆<br />
dt L(q⋆ , dq⋆ , t ⋆ ) ) ∣ dt ⋆ ε=0<br />
= 0<br />
Umformung von ( dt ⋆<br />
dt L(q⋆ , dq⋆<br />
dt ⋆ , t ⋆ ) ) .<br />
Verwende dazu<br />
dt ⋆<br />
dt = 1 + εdϕ dt<br />
dq ⋆<br />
dt = dq⋆ dt<br />
⋆ dt dt ⋆<br />
=<br />
( dq<br />
dt + εdψ dt<br />
= ˙q + ε( ˙ψ − ˙q ˙ϕ)<br />
( dt ⋆<br />
dt L(q⋆ , dq⋆<br />
dt ⋆ , t ⋆ ) )<br />
) (<br />
1 − ε dϕ )<br />
dt<br />
Hier<strong>bei</strong> wurde getaylort,<br />
dt<br />
dt ⋆<br />
= ( )<br />
1 + ε dϕ −1<br />
dt = 1 − ε<br />
dϕ<br />
+ dt O(ε2 )<br />
Setze die Transformationen in d dt<br />
( dt ⋆<br />
dt L(q⋆ , dq⋆<br />
dt ⋆ , t ⋆ ) ) ∣ ∣<br />
ε=0<br />
= 0 ein.
24 KAPITEL 3. SYMMETRIEPRINZIPIEN<br />
0 = d (<br />
L(q + εψ, ˙q + ε(<br />
dε<br />
˙ψ<br />
∣∣ε=0<br />
− ˙q ˙ϕ), t + εϕ)(1 + ε ˙ϕ))<br />
( ∂L<br />
=<br />
∂q ψ + ∂L<br />
∂ ˙q ( ˙ψ − ˙q ˙ϕ) + ∂L )<br />
∂t ϕ + L ˙ϕ ( ) d ∂L<br />
= ψ + ∂L (<br />
dt ∂ ˙q ∂ ˙q ˙ψ + − ∂L )<br />
∂ ˙q ˙q + L ∂L<br />
˙ϕ +<br />
}{{} ∂t<br />
= d dt (∂L ∂ ˙q ψ) + d (<br />
(L − ∂L )<br />
dt ∂ ˙q ˙q)ϕ<br />
( )<br />
Also ist Q(q, ˙q, t) = ∂Lψ<br />
+ L − ∂L ˙q ϕ = const<br />
∂ ˙q ∂ ˙q<br />
Mehrere Koordinaten<br />
Q = ∑ (<br />
∂L<br />
ψ i + L − ∑ ∂ ˙q<br />
i i<br />
i<br />
ϕ<br />
nach 2.2.2 d ∂L<br />
(L− dt ∂ ˙q ˙q)<br />
)<br />
∂L<br />
˙q i ϕ<br />
∂ ˙q i<br />
Jede konstante Symmetrietransformation liefert eine Erhaltungsgröße.
Kapitel 4<br />
Schwingungen eines Systems <strong>bei</strong> kleinen<br />
Auslenkungen<br />
4.1 Eigenfrequenzen und Eigenmoden<br />
Sei<br />
L = 1 ∑<br />
a jk ˙q j ˙q k − U(q i )<br />
2<br />
j,k<br />
Annahme: U besitze ein Minimum <strong>bei</strong> q i = q 0 i (Wo<strong>bei</strong> 0 hier den Index angibt, i die<br />
Komponente)<br />
Taylor-Entwicklung um Minimum<br />
U(q i ) = U(qi 0 ) + ∑ dU(q i ) ∣<br />
∣qi<br />
· (q<br />
} {{ } dq<br />
=q 0 i − qi 0 ) + 1 ∑ d d<br />
U(q i ) ∣ j j<br />
i<br />
2 dq j dq qi =q k i<br />
0<br />
Irrelevant<br />
j,k<br />
} {{ }<br />
=0<br />
Betrachte nun kleine Auslenkungen : ˙q i , ˙q k ist bereits quadratisch<br />
=⇒ a jk (q i ) → a jk (q 0 i ) = const<br />
Es sei x i = q i − q 0 i , ẋ i = ˙q i<br />
Definiere<br />
· (q j − q 0 j )(q k − q 0 k)<br />
a jk (qi 0 ) = M jk<br />
d d<br />
U ∣ dq j dq qi<br />
= K<br />
=q 0 jk<br />
k i<br />
25
26KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
L = ∑ 1<br />
M 2 jkẋ j ẋ k − ∑ 1<br />
K 2 jkx j x k = 1 Mẋ − 1<br />
j,k<br />
j,k<br />
2ẋT 2 xT Kx<br />
Also gilt für weitere Betrachtungen<br />
L = 1 2ẋT Mẋ − 1 2 xT Kx<br />
M und K können symmetrisch gewählt werden<br />
x ∈ C n , M ∈ C n×n<br />
Bewegungsgleichung d ∂L<br />
dt ∂ẋ i<br />
− ∂L<br />
∂x i<br />
= 0<br />
(<br />
)<br />
∑<br />
∂ 1<br />
Es gilt :<br />
∂x i<br />
K<br />
2 jk x j x k = ∑ K ij x j<br />
j<br />
j,k<br />
d<br />
dt<br />
∑<br />
M ij ẋ j + ∑<br />
j<br />
j<br />
K ij x j = 0<br />
Somit ergibt sich<br />
Mẍ + Kx = 0<br />
System linearer DGL mit konstanten Koeffizienten.<br />
Ansatz x k (t) = A k e iωt , A ∈ C n<br />
Eingesetzt :<br />
−ω 2 M · A + KA = 0 oder<br />
(K − ω 2 M)A = 0 (4.1)<br />
In Komponenten<br />
∑<br />
(K ij − ω 2 M ij )A j = 0 (4.2)<br />
j<br />
Damit diese Gleichung eine nicht-triviale Lösung hat, muss K − ω 2 M singulär sein, also<br />
det(K − ω 2 M) = 0
4.1. EIGENFREQUENZEN UND EIGENMODEN 27<br />
det(K − ω 2 M) ist ein Polynom n−ten Grades in ω 2 =⇒ n Nullstellen<br />
Beachte: Eigenwerte von K und M sind positiv definiert, da<br />
x T Kx > 0 für |x| > 0 ( Minimum <strong>bei</strong> x=0 )<br />
ẋ T Mẋ > 0 für |ẋ| > 0 ( kinetische Energie positiv)<br />
Lösung der DGL<br />
x i (t) = R(A i e −iωt )<br />
mit ω = √ ω 2 und A i komplex. Aus physikalischen Prinzipien muss ω 2 positiv sein, sonst<br />
gibt es exponentiell wachsende Lösungen.<br />
Mathematischer Beweis :<br />
KA = ω 2 M nach (4.1)<br />
A ⋆T KA = ω 2 A ⋆T MA<br />
ω 2 = A⋆T KA<br />
A ⋆T MA<br />
Wo<strong>bei</strong> Zähler und Nenner jeweils positiv sind.<br />
Wegen R ((a i + ib i )e ±iωt ) = a i cos(ωt) ∓ b i sin(ωt) genügt es, ω > 0 und nur e −iωt<br />
betrachten<br />
det(K − ω 2 M) = 0 hat n Lösungen (Eigenwerte) , ωk 2, k = 1, . . . , n<br />
Eventuell fallen r zusammen. Dann hat das zu ωk 2 gehörige Gleichungssystem<br />
zu<br />
∑<br />
(K ij − ωkM 2 ij )A (k)<br />
j = 0<br />
j<br />
den Rang n − r. Es können r Komponenten von A (k) frei gewählt werden =⇒ r verschiedene<br />
Lösungen (Linear unabhängige Lösungen) zu ω k .<br />
A (k)<br />
j<br />
bezeichnet hier allerdings nicht die k−te Ableitung des Vektors, sondern der zu ω 2 k<br />
dazugehörige Vektor A<br />
Die allgemeinste Lösung ist eine Kombination der Fundamentalschwingunen (Einzellösungen)<br />
Im Fall ω 2 k = 0 ersetzen wird c ke iω kt durch a k + b k t
Für k ≠ l gelte ω 2 l ≠ ω 2 k . Also A (l)T MA (k) = 0<br />
28KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
4.2 Normalkoordinaten<br />
Übergang zu neuen Koordinaten, die den Eigenmoden entsprechen (analog zu Diagonalisierung<br />
einer hermiteschen Matrix. Hier wegen M und K ≠ 1 etwas komplizierter)<br />
Es gilt<br />
(K − ω 2 kM)A (k) = 0 =⇒ A (l)T (K − ω 2 kM)A (k) = 0 für beliebige k, l (4.3)<br />
Ebenso (K − ω 2 k M)A(k) = 0 transponiert : A (l)T (K T − ω 2 k M T ) = 0<br />
Aufgrund der Symmetrie ist K T = K, M T = M<br />
A (l)T (K − ω 2 l M)A (k) = 0 (4.4)<br />
Betrachte nun (4.4) − (4.3) (ω 2 k − ω2 l )A(l)T MA (k) = 0<br />
Für k = l wähle die Normierung von A (k) so, dass A (k)T MA (k) = 1 =⇒ A (l)T M Also<br />
A (l)T MA (k) = δ lk<br />
Falls M = 1 =⇒ Eigenvektoren von K bilden ein Orthonormalsystem.<br />
Definiere die Matrix<br />
a = (a ij ) = ( A (1) |A (2) | . . . |A (n))
4.3. ANHARMONISCHE SCHWINGUNGEN 29<br />
Wo<strong>bei</strong> a T Ma = 1<br />
Wegen A (k)T (K − ω 2 k M)A(k) = 0 gilt A (l)T KA (k) = ω 2 k δ lk oder<br />
⎛<br />
⎞<br />
ω1 2 0 0<br />
a T Ka = ⎜<br />
⎝ 0<br />
.. . 0<br />
⎟<br />
⎠ = (ω2 )<br />
0 0 ωn<br />
2<br />
Die Ersetzung x = aQ führt auf ein System von entkoppelten harmonisch Oszillierenden Q i<br />
L = 1 2ẋT Mẋ − 1 2 xT Kx<br />
= 1 2 ˙Q T a T Ma } {{ }<br />
1<br />
˙Q − 1 2 QT a} T {{ Ka}<br />
Q<br />
(ω 2 )<br />
= 1 2 ˙Q T 1 ˙Q − 1 2 QT (ω 2 )Q<br />
= ∑ k<br />
1<br />
2 ˙Q 2 k − 1 2 ω2 kQ 2 k<br />
4.3 Anharmonische Schwingungen<br />
Bisher : kleine Auslenkungen um die Ruhelage, woraus sich ergeben haben<br />
• lineare Bewegungsgleichungen<br />
• Frequenz unabhängig von der Stärke der Auslenkung.<br />
Frage: Was passiert <strong>bei</strong> Berücksichtigung höherer Terme in der Taylor-Entwicklung? Es<br />
ergeben sich Nicht-Linearitäten und Anharmonizitäten. (Nichtlineare Medien ergeben Einmischungen<br />
von Oberschwingungen,z.B.: Optik - Frequenzverdopplung) Ansatz ist dann<br />
L = 1 ∑<br />
(m ik ẋ i ẋ k − k ik x i x k ) + 1 ∑<br />
(n ikl ẋ i ẋ k x l ) − 1 ∑<br />
(l ikl x i x k x l )<br />
2<br />
2<br />
3<br />
i,k<br />
Verboten sind hier<strong>bei</strong> jedoch ẋ 3 und ẋ 1 , da die Geschwindigkeit nie linear auftaucht wegen<br />
T = f ik (x j )ẋ j ẋ k<br />
i,k,l<br />
i,k,l
30KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
4.3.1 Betrachtung der Quadratischen Terme<br />
Übergang zur Normalkoordinaten durch lineare Transofrmation : x i = lineare Funktion<br />
von Q k .<br />
L = 1 ∑ (<br />
˙Q 2 k − ω 2<br />
2<br />
kQk)<br />
2 + 1 ∑<br />
)<br />
(λ ijk ˙Q i ˙Q j Q k − 1 ∑<br />
(µ ijk Q i Q j Q k )<br />
2<br />
3<br />
k<br />
i,j,k<br />
Die Bewegungsgleichungen ergeben sich aus d dt<br />
∂L<br />
∂ ˙Q − ∂L<br />
k ∂Q k<br />
¨Q k + ω 2 kQ k = f k<br />
(Q,<br />
)<br />
˙Q, ¨Q<br />
i,j,k<br />
= 0, woraus sich hier ergibt<br />
Wo<strong>bei</strong> f k von allen Q abhängen kann. Frage: Wie lautet f k ausgedrückt durch λ, µ ?<br />
(<br />
d ∂L<br />
dt ∂ ˙Q<br />
= d ˙Q k + ∑ )<br />
λ hkj ˙Q h Q j<br />
k<br />
dt<br />
h,j<br />
= ¨Q k + ∑ (<br />
λ hkj ¨Qh Q j + ˙Q<br />
)<br />
h ˙Q j<br />
hj<br />
} {{ }<br />
f k<br />
∂L<br />
=<br />
∂Q k<br />
f k harmonische Funktion zweiten Grades in Q, ˙Q, ¨Q j<br />
Störungstheorie<br />
Die Summenterme, also mit f k sind klein gegenüber ω 2 k Q k. Alternative Lösung<br />
Q k = Q (1)<br />
k<br />
+ Q (2)<br />
k<br />
+ Q (3)<br />
k<br />
+ . . .<br />
(a) Bestimmte Q (1)<br />
k<br />
aus<br />
¨Q (1)<br />
k<br />
+ ω 2 kQ (1)<br />
k<br />
= 0<br />
(b) Q (1)<br />
k<br />
in f eingesetzt liefert eine Gleichung für Q (2)<br />
k<br />
mit<br />
|Q (2)<br />
k<br />
|
4.3. ANHARMONISCHE SCHWINGUNGEN 31<br />
Es ergibt sich Q (1)<br />
k<br />
= a k cos(ω k t + α k ). Q (1)<br />
k<br />
+ Q (2)<br />
k<br />
wird in ¨Q k + ωk 2Q k = f k (Q, ˙Q, ¨Q)<br />
eingesetzt. Auf der linken Seite fällt Q (1)<br />
(2)<br />
k<br />
heraus, es bleibt ¨Q<br />
k<br />
+ ω k Q (2)<br />
k<br />
= . . . . Auf der<br />
rechten Seite setzen wir für Q i die Näherung Q (1)<br />
i ein. Dies ist quadratisch in Q, ˙Q, ¨Q und<br />
ist gegeben durch<br />
f k (Q (1) , ˙Q (1) , ¨Q (2) )<br />
f k enthält Produkte vom Typ<br />
Q (1)<br />
i Q (1)<br />
j = a i a j cos(ω i t + α i ) cos(ω j t + α j )<br />
= a i a j<br />
1<br />
2 (cos ((ω it + α i ) + (ω j tα j )) + cos ((ω i t + α i ) − (ω j t + α j )))<br />
und ähnlich für Q ˙Q, ˙Q 2 , . . .<br />
Betrachten wir nun die Zweite Ordnung<br />
¨Q (2)<br />
k<br />
+ ωkQ 2 (2)<br />
k<br />
= ∑ i,j<br />
a i a j (cos ((ω i t + α i ) + (ω j tα j )) + cos ((ω i t + α i ) − (ω j t + α j )))<br />
Gleichung wie mit einer äußeren periodischen ( ) Kraft, die mit einer Kombinationsfrequenz<br />
2ω k<br />
ω i ± ω j , wirkt, darunter auch ω k ± ω k = → Frequenzverdopplung.<br />
0<br />
Bei der dritten Näherung Q (3) gibt es <strong>bei</strong> den Winkelfunktionen der Form<br />
a i a j a k cos ((ω i ± ω j ± ω k )t + α i ± α j ± α k )<br />
und speziell für i = j = k auch Terme der Form<br />
a 3 k cos(ω k t + α k )<br />
Die Differentialgleichung ist dann von der Form<br />
¨Q (3)<br />
k<br />
+ ω 2 kQ (3) = a 3 k cos(ω k t + α k )<br />
und führt zu Lösungen mit zeitlich wachsender Amplitude mit<br />
Q (3)<br />
k<br />
= a3 k<br />
2ω k<br />
t sin(ω k tα k )
32KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
Dies ist jedoch nicht physikalisch akzeptabel! Es würde einen Widerspruch zur Energieerhaltung<br />
geben. Wir müssen die Frequenz korrigieren. Der lineare Term rührt hier von<br />
(<br />
)<br />
cos (ω (0)<br />
k<br />
+ ∆ω k )t ≈ cos(ω (0)<br />
k t) − t∆ω k sin(ω (0)<br />
k t)<br />
} {{ }<br />
ursprüngliche Grundfunktion,≤1<br />
Dies ist jedoch linear in t und kann deswegen nur für kleine Zeiten gelten. Durch Isolierung<br />
der in t−linearen Terme gewinnt man die Frequenzverschiebung. Beispiel: Ein Freiheitsgrad,<br />
Rechnung bis zur dritten Ordnung.<br />
L = m 2 ẋ2 −<br />
( mω<br />
2<br />
0<br />
2 x2 + m 3 αx3 + m 4 βx4 )<br />
} {{ }<br />
:=V (x)<br />
(4.5)<br />
Die Bewegungsgleichung ist dann<br />
ẍ + ω 2 0x = −αx 2 − βx 3<br />
und |ω 2 0x| >> |αx 2 | >> |βx 3 |. Als Ansatz wähle<br />
x = x (1) + x (2) + x (3) + . . .<br />
x (1) = a cos(ωt)<br />
ω = ω 0 + ω (1) + ω (2)<br />
ω (1) , ω (2) soll so bestimmt werden, dass kein Resonanzterm auftaucht. Umformung von<br />
(4.5) so, dass die linke Seite immer Null wird.<br />
( )<br />
ω0<br />
2<br />
ω ẍ + 2 ω2 0x = −αx 2 − βx 3 − 1 − ω2 0<br />
ẍ (4.6)<br />
ω 2<br />
Als Ansatz wähle<br />
x = x (1) + x (2)<br />
ω = ω 0 + ω (1)
4.3. ANHARMONISCHE SCHWINGUNGEN 33<br />
Einsetzen in (4.6) liefert, dass die linke Seite verschwindet für x = x (1) . Auf der rechten<br />
Seite nur x (1) einsetzen, aufgrund kleiner Auslenkungen von x (2) . Weiterhin kann der x 3<br />
Term aufgrund vergleichsweiser kleiner Werte vernachlässigt werden. Also<br />
( )<br />
ω0<br />
2<br />
ω 2 ẍ(2) + ω0x 2 (2) = −αa 2 cos 2 (ωt) − 1 − ω2 0<br />
(−a)ω 2 cos(ωt)<br />
ω 2<br />
= −αa 2 1 2 (1 − cos(2ωt)) + a(ω2 − ω 2 0) cos(ωt)<br />
= −αa 2 1 2 (1 − cos(2ωt)) + (2ω 0 + ω (1) )ω (1) cos(ωt)<br />
} {{ }<br />
Dies wäre jedoch ein Resonanzterm<br />
Daraus ergibt sich, da kein Resonanzterm exisitieren darf<br />
ω (1) = 0<br />
. Dies bedeutet keine Frequenzveränderung. In der zweiten Näherung ergibt sich : Bestimme<br />
x (2) (t) aus<br />
ẍ (2) + ω 2 0x (2) = − αa2<br />
2<br />
(1 + cos(2ωt)) (4.7)<br />
Die Lösung ist bereits aus Theo A bekannt, es ist eine Verschiebung um − αa2<br />
2ω0<br />
2<br />
harmonische Frequenz 2ω<br />
und um eine<br />
x (2) = − αa2<br />
2ω 2 0<br />
+ α 6<br />
a 2<br />
ω0<br />
2<br />
cos(2ωt) (4.8)<br />
Die dritte Näherung<br />
x = x (1) + x (2) + x (3)<br />
ω = ω 0 + ω (2)
34KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
Betrachte die Gleichung (4.6), wo<strong>bei</strong> nur die Terme der dritten Ordnung betrachtet werden<br />
z.B.:<br />
(x (1) + x (2) + x (3) ) 2 = (x (1 ) 2 Zweite Ordnung<br />
= 2x (1) x (2) dritte Ordnung<br />
= (x (2) ) 2 vierte Ordnung<br />
Damit folgt<br />
ẍ (3) + ω0x 2 (3) = −2αx (1) x (2) − β(x (1) ) 3 + 2ω 0 ω (2) x (1)<br />
Setze x (1) und x (3) aus (4.8) rechts ein . Verwende Theoreme für Produkte von Sinus und<br />
Cosinus.<br />
Nach Rechnung erhält man<br />
[ ] β<br />
ẍ (3) + ω 0 x (3) = a 3 4 − α2<br />
cos(3ωt) + a<br />
6ω0<br />
2<br />
cos ωt · cos 2ωt =<br />
cos 3 ωt =<br />
[<br />
2ω 0 ω (2) + 5 a 2 α 2<br />
− 3 ]<br />
6 ω0<br />
2 4 a2 β<br />
} {{ }<br />
Muss 0 sein aufgrund von Resonanzschwingungen<br />
cos(ωt)<br />
Daraus folgt<br />
( 3<br />
ω (2) β<br />
= − 5 8 ω 0 12<br />
α 2<br />
ω0<br />
3<br />
)<br />
a 2<br />
Daraus ergibt sich für die Störung von x<br />
x (3) =<br />
a3<br />
16ω 2 0<br />
( α<br />
2<br />
3ω 2 0<br />
− β 2<br />
)<br />
cos(3ωt)
4.3. ANHARMONISCHE SCHWINGUNGEN 35<br />
Beispiel Als Beispiel wähle ein Fadenpendel mit Auslenkwinkel θ , Länge l und Masse<br />
des Pendelkörpers m.<br />
L = m 2 l2 ˙θ2 − V (θ)<br />
E = m 2 l2 ˙θ2 + V (θ)<br />
V (θ) = −mgl cos(θ)<br />
1. Methode E = const, ˙θ 2 =<br />
E−V (θ)<br />
m l2 2<br />
√<br />
ml<br />
2<br />
2<br />
dθ<br />
√<br />
E − V (θ)<br />
= dt<br />
Wähle θ 0 ( eine mögliche Auslenkung) so, dass V (θ 0 ) = E<br />
√<br />
ml<br />
2<br />
2<br />
dθ<br />
√<br />
−mgl(cos θ0 − cos θ) = dt<br />
√<br />
∫<br />
l<br />
θ 0<br />
dθ<br />
√ = T g 2(cos θ − cos θ0 4<br />
0<br />
Wo<strong>bei</strong> T die Umlaufdauer angibt mit T = 2πR<br />
ω<br />
Bronstein u.ä. zu lösen.<br />
Näherung ist hier dann<br />
√<br />
T<br />
4 = l<br />
g<br />
cos θ = 1 − θ2<br />
2 − θ4<br />
24<br />
∫ θ 0<br />
0<br />
Dies ist ein elliptisches Integral, mit<br />
dθ<br />
√<br />
(θ0 2 − θ 2 ) + (θ 4 − θ0) 4 · 1<br />
12<br />
Führende Ordnung<br />
∫ θ 0<br />
∫1<br />
dθ<br />
√<br />
θ<br />
2<br />
0 − θ = 2<br />
du<br />
√<br />
1 − u<br />
2 = π 2<br />
0<br />
0
36KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN<br />
Damit gilt für die führende Ordnung<br />
T =<br />
ω 0 =<br />
√<br />
l<br />
g 2π<br />
√ g<br />
l<br />
Korrektur :<br />
∫1<br />
T<br />
ω 0<br />
4 =<br />
0<br />
du<br />
√<br />
1 − u 2 + θ0 2 (u 4 − 1) · 1<br />
12<br />
Verwende<br />
1<br />
√<br />
1 − δ<br />
≈ 1 + δ 2<br />
für kleine δ<br />
∫1<br />
T<br />
ω 0<br />
4 =<br />
ω 0 T<br />
4<br />
0<br />
[<br />
du<br />
√ 1 + θ2 0<br />
1 − u<br />
2 2<br />
= π 2 + θ2 0 3 π<br />
24 2 2<br />
= π ( )<br />
1 + θ2 0<br />
2 16<br />
]<br />
1 + u 2<br />
2<br />
Woraus sich ergibt<br />
2. Methode<br />
Daraus ergibt sich<br />
( )<br />
ω = ω 0 1 − θ2 0<br />
16<br />
L = ml 2 [ 1<br />
2 ˙θ 2 − 1 2 ω2 0<br />
)]<br />
(θ 2 − θ4<br />
12<br />
β = 1 6 ω2 0 a = θ 0<br />
(<br />
3<br />
8 ω(2) = θ2 0<br />
− 1 )<br />
ω 0 6 ω2 0 = − 1 16 ω 0θ0<br />
2<br />
Dies ist jedoch genau das Ergebnis aus der Menablathode der Anharmonischen Näherung<br />
aus der 1. Methode.
4.3. ANHARMONISCHE SCHWINGUNGEN 37<br />
ẋ<br />
ẋ (1)<br />
ẋ (2)<br />
T<br />
2<br />
t<br />
T = 2π ω<br />
T 0 = 2π<br />
ω 0<br />
Abbildung 4.1: Fourier-Reihe
38KAPITEL 4. SCHWINGUNGEN EINES SYSTEMS BEI KLEINEN AUSLENKUNGEN
Kapitel 5<br />
Hamilton-Formalismus kanonischer<br />
Gleichungen/ Poisson-Klammern<br />
5.1 Struktur der Mechanik<br />
• Hamilton Funktion H (Symmetrie zwischen Koordinaten und Impuls, Quantenmechanik<br />
Hamilton Operator).<br />
• Poisson-Klammern (In der Quantenmechanik vergleichbar mit der Vertauschungsrelation).<br />
• Phasenraum (Satz von Liouville)<br />
5.1.1 Legendre Transformation : von L zu H<br />
Lagrange Funktion hängt ab von q, ˙q, t. Euler-Lagrange-Gleichungen lieferen Differentialgleichungen<br />
zweiten Grades.<br />
Ziel: Übergang zu q und p = ∂L (und t) als unabhängige Variablen liefern ein System von<br />
∂ ˙q<br />
Zwei Differentialgleichungen erster Ordnug (bzw 2n DGL für n Freiheitsgrade).<br />
Mathematischer Einschub: Legendre Transformation Betrachte f(x, y) =⇒ df =<br />
udx + vdy mit u = ∂f , v = ∂f . f spielt die Rolle eines Potentials. Wenn lediglich u und v<br />
∂x ∂y<br />
gegeben sind, muss gelten<br />
∂u<br />
∂y = ∂v<br />
∂x<br />
39
40KAPITEL 5. HAMILTON-FORMALISMUS KANONISCHER GLEICHUNGEN/ POISSON-KLAM<br />
f, u, v sind Funktionen von x, y. Ziel: Übergang auf neue Funktion g, so dass u = ∂f<br />
∂x und<br />
y unabhängige Variablen sind. Wähle hierzu<br />
g = f − ux (5.1)<br />
g = Legendre-Transformation zu f<br />
dg = df − udx − xdu = udx + vdy − udx − xdu<br />
dg = vdy − xdu (5.2)<br />
v und x sind selbst als Funktion von u und y zu interpretieren. Es gilt weiterhin ∂f (x, y) =<br />
∂x<br />
u. Die Inversion liefert x =Funktion von y, u. v = ∂f (x(y, u), y)<br />
∂y<br />
Wegen (5.2) gilt<br />
∂u<br />
∂y | u=const = v, ∂g<br />
∂u | y=const = −x<br />
Verweis auf Thermodynamik : Energie auf freie Energie (Thermodynamische Potentiale).<br />
5.1.2 Hamilton Funktion<br />
Betrachte<br />
H = ˙q ∂L<br />
∂ ˙q − L<br />
(bis auf Vorzeichen wie (5.1) Annahme ∂L (q, ˙q, t) = p ist umkehrbar<br />
∂ ˙q<br />
=⇒ ˙q =Funktion<br />
von q, p, t<br />
H(q, p, t) = ˙q(q, p, t)p − L(q, ˙q(q, p, t), t)<br />
dH = ˙qdp − ṗdq − ∂L<br />
∂t dt
5.1. STRUKTUR DER MECHANIK 41<br />
Somit folgt<br />
Definition<br />
Kanonische Gleichungen<br />
∂H<br />
∂p = ˙q<br />
∂H<br />
∂q = −ṗ<br />
∂H<br />
∂t = −∂L ∂t<br />
Energieerhaltung<br />
Wegen<br />
gilt dH dt<br />
= ˙q dp<br />
dt − ṗ dq<br />
− ∂L dt<br />
dt ∂t<br />
dt . Also<br />
dH = ˙qdp − ṗdq − ∂L<br />
∂t dt<br />
d<br />
dt H = ∂H<br />
∂t<br />
5.1.3 Poisson Klammern<br />
Es sei f(p, q, t) eine beliebige Funktion der Koordinaten, Impulse und der Zeit. Dann ist<br />
Die Hamilton - Gleichungen liefern<br />
df<br />
dt = ∂f<br />
∂p ṗ + ∂f<br />
∂q<br />
˙q +<br />
∂f<br />
∂t<br />
df<br />
dt = ∂f (<br />
− ∂H )<br />
+ ∂f ∂H<br />
∂p ∂q ∂q ∂p + ∂f<br />
∂t
42KAPITEL 5. HAMILTON-FORMALISMUS KANONISCHER GLEICHUNGEN/ POISSON-KLAM<br />
Notation<br />
Definition<br />
Poisson-Klammern <strong>bei</strong> n Freiheitsgraden<br />
{H, f} =<br />
n∑<br />
k=1<br />
∂H<br />
∂p k<br />
∂f<br />
∂q k<br />
− ∂H<br />
∂q k<br />
∂f<br />
∂p k<br />
Somit folgt<br />
Falls ∂f<br />
∂t<br />
df<br />
dt<br />
= 0 und falls {H, f} = 0 ergibt sich<br />
= {H, f} +<br />
∂f<br />
∂t<br />
df<br />
dt = 0<br />
( )<br />
Beispiel: f = xp y − yp x und H = 1<br />
2m p<br />
2<br />
x + p 2 y + p 2 z + V (x 2 + y 2 + z 2 ) Für beliebige f, g<br />
definieren wir<br />
{f, g} = ∑ ∂f ∂g<br />
− ∂f ∂g<br />
∂p k ∂q k ∂q k ∂p k<br />
k<br />
Was erhält man für {L x , L y } mit L x = yp z − zp y und L y = xp z − zp x . Es gilt dann<br />
{f, q k } = ∂f<br />
∂p k<br />
{q i , q k } = 0<br />
{p i , p k } = 0<br />
{p i , q k } = δ ij<br />
Quantenmechanik : {f, g} =⇒ [F, G]<br />
5.1.4 Phasenraum<br />
Wodurch ist der Zustand eines mechanischen Systems vollständig beschrieben?<br />
Die Lage eines mechanischen Systems mit N Freiheitsgraden wird durch die N Koordinaten<br />
g i beschrieben. Allein durch die Angabe der Lage der Teilchen lässt sich die zeitliche<br />
Entwicklung des Systems nicht berechnen, DGL 2. Ordnung, daher 2 Anfangsbedingungen.
5.1. STRUKTUR DER MECHANIK 43<br />
Zur vollständigen Beschreibung des Zustands des Systems benötigt man die Kenntnis der<br />
Impulse zum Zeitpunkt t 0 .<br />
Alle möglichen Werte der Koordinaten q i und Impulse p i bilden den Phasenraum. Zu jeder<br />
Zeit wird der Zustand eines Systems durch einen Punkt im Phasenraum beschrieben.<br />
Beispiel: harmonischer Oszillator<br />
L = m 2 ˙q2 − mω2<br />
2 q2<br />
der kanonische Impuls p = ∂L<br />
∂ ˙q = m ˙q =⇒ ˙q = p m<br />
Definiere neue Variablen:<br />
z 1 = √ mωq, z 2 = 1 √ m<br />
p<br />
Kanonische Gleichungen:<br />
H(q, p) = p ˙q − L = p2<br />
m − p2<br />
2m + mω2<br />
2 q2 = 1 p 2<br />
2 m + mω2<br />
2 q2<br />
Ausgedrückt durch die neuen Variablen<br />
=⇒ H = 1 2 z2 1 + 1 2 z2 2<br />
∂H<br />
∂p = d dt q, ∂H<br />
∂q = − d dt p<br />
∂H<br />
∂p = ∂H ∂z 2<br />
∂z 2 ∂p = √ 1 ∂H<br />
= d m ∂z 2 dt q = d dt<br />
1<br />
√ z 1 = 1 d<br />
√ mω mω dt z 1<br />
mit τ = tω folgt<br />
∂H<br />
= 1 d<br />
∂z 2 ω dt z 1<br />
∂H<br />
= − 1 d<br />
∂z 1 ω dt z 2<br />
∂H<br />
∂z 2<br />
= d dt z 1,<br />
∂H<br />
∂z 1<br />
= − d dt z 2<br />
=⇒ z 2 = d dt z 1, z 1 = − d dt z 2<br />
mit der Lösung<br />
z 1 (t) = a cos(τ − ϕ)
44KAPITEL 5. HAMILTON-FORMALISMUS KANONISCHER GLEICHUNGEN/ POISSON-KLAM<br />
z 2 (t) = −a sin(τ − ϕ)<br />
Anfangswerte zur Zeit t = 0:<br />
z 0 1 = √ mωq(0)<br />
z 0 2 = 1 √ m<br />
p(0)<br />
die Energie ist erhalten, E = H, also<br />
durch Einsetzen der Anfangsbedingungen<br />
E = H = 1 2 (z2 1 + z 2 2) = const. = a2<br />
2<br />
a =<br />
√<br />
(z 0 1) 2 + (z 0 2) 2<br />
cos(ϕ) = z0 1<br />
a<br />
, sin(ϕ) = z0 2<br />
a<br />
Betrachte Bewegung im Phasenraum:<br />
U(z 1 )<br />
E<br />
z 1<br />
z 2<br />
z 1<br />
(z 0 1, z 0 2)<br />
Abbildung 5.1: Bewegung im Phasenraum
5.1. STRUKTUR DER MECHANIK 45<br />
Bewegung im Phasenraum liegt auf einem Kreis.<br />
Verschiedene Energien entsprechen verschiedenen Radien des Kreises, Kreisfrequenz ist für<br />
alle Energien dieselbe!<br />
Die Zustände mit E 1 ≤ E ≤ E 2 belegen ein bestimmtes Volumen im Phasenraum entspricht<br />
der Fläche des entsprechenden Kreisringes. <strong>Dr</strong>ückt man die Variablen z 1 , z 2 wieder durch<br />
q und p aus, erhält man im Phasenraum eine Ellipse mit Halbachsen<br />
P max = √ 2Em, q max =<br />
Die Fläche der Ellipse ist gegeben durch<br />
√<br />
2E<br />
mω 2<br />
F = πq max p max = 2π E ω<br />
Die Zustände mit Energie E 1 ≤ E ≤ E 2 besitzen das Volumen<br />
Dimension des Volumens:<br />
2π<br />
ω (E 2 − E 1 )<br />
Wirkung = Energie · Zeit<br />
= Ort · Impuls<br />
= verallgemeinerter Ort · verallgemeinerter Impuls<br />
Quantenmechanik: Nur ein Zustand in einem Volumenelement der Größe 2π 1 n existiert.<br />
Harmonischer Oszillator: Energien quantisiert<br />
E = ω(n + 1 2 ), n ∈ N<br />
Beispiel: ebenes Pendel<br />
L = l2 m<br />
2 ˙ϕ2 − U(ϕ) = m 2 l2 ˙ϕ 2 + (cos(ϕ) − 1)mgl<br />
kanonisch konjugierter Impuls: p = ∂L<br />
∂ ˙ϕ = l2 m ˙ϕ<br />
=⇒ ˙ϕ = p<br />
ml 2
46KAPITEL 5. HAMILTON-FORMALISMUS KANONISCHER GLEICHUNGEN/ POISSON-KLAM<br />
H =<br />
Führe wie zuvor neue Variablen ein<br />
z 1 = ϕ, z 2 =<br />
p2<br />
− (cos(ϕ) − 1)lmg<br />
2ml2 p<br />
ml 2 ω , ω2 = g l , τ = ωt<br />
dz 1<br />
dτ = z 2(τ),<br />
dz 2<br />
dτ = − sin(z 1(τ))<br />
H = 1 2 mglz2 2 − (cos(z 1 ) − 1)mgl<br />
Energie ist wieder erhalten.<br />
ε =<br />
H mgl = 1 2 z2 2 − (cos(z 1 ) − 1) = const.<br />
Bahnen im Phasenraum für festes ε<br />
z 2 = ± √ 2(ε + cos(z 1 ) − 1) (5.3)<br />
Diskutier 5.3 für verschiedene Werte von ε.<br />
(1) ε > 2:<br />
ε + cos(z 1 ) − 1 > 0∀z 1<br />
Nullstelle wird nicht erreicht. z 2 immer entweder > 0 oder < 0<br />
Lösung periodisch mit Periode 2π symmetrisch um 0<br />
maximal für z 1 = 0, 2π, . . .<br />
minimal für Z 1 = π, −π, . . .<br />
U(z 1 )<br />
−π +π<br />
Abbildung 5.2: Potential<br />
z 1
5.1. STRUKTUR DER MECHANIK 47<br />
z 2<br />
(3)<br />
−π (2) +π<br />
z 1<br />
(1)<br />
Abbildung 5.3: Phasenraumdiagramm des Pendels<br />
(2) kleine ε:<br />
ε + cos(z 1 ) − 1 > 0 =⇒ z 1 klein<br />
ε + (1 + z2 1<br />
2<br />
) − 1 > 0 =⇒ z 2 1 2ε<br />
also z 2 = ± √ 2ε − z 2 1<br />
=⇒ z 2 1 + z 2 2 = 2ε<br />
Kreise im Phasenraum mit Radius 2ε!<br />
(3) Grenzfall ε = 2, Kriechfall:<br />
z 2 = ± √ 2(cos(z 1 ) + 1)<br />
z 2 nimmt für z 1 = ±π den Wert 0 an.<br />
Satz<br />
Satz von Liouville<br />
Gegeben sei ein Ensemble von Zuständen in einem Gebiet des Phasenraums<br />
mit vorgegebenem Volumen V . Bei der zeitlichen Entwicklung bleibt das Volumen<br />
konstant.
48KAPITEL 5. HAMILTON-FORMALISMUS KANONISCHER GLEICHUNGEN/ POISSON-KLAM
Kapitel 6<br />
Starrer Körper ( Kreisel )<br />
6.1 Kinematik<br />
Bisher lediglich Massenpunkte. Ein ausgedehnter, starrer Körper K wird interpretiert als<br />
viele Massenpunkte und Zwangsbedingung<br />
∑<br />
∫<br />
m i → ρ(⃗x)dV<br />
i<br />
Wo<strong>bei</strong> ρ(⃗x) die ortsabhängige Dichte beschreibt. Eine Beschreibung der Lage von K führt<br />
zu einem Koordinatensystem.<br />
• L ˆ= Laborsystem (ruhend) (X, Y, Z)<br />
• K ˆ= körperfestes System (x, y, z). Der Nullpunkt von K wird häufig im Schwerpunkt<br />
gewählt.<br />
Im K-System (bezüglich L) festgelegt durch Ursprung von K und die Orientierung der<br />
Achsen von K.<br />
49
50 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
z<br />
ˆr<br />
z<br />
P<br />
⃗r<br />
⃗R<br />
Körper<br />
y<br />
x<br />
x<br />
y<br />
Abbildung 6.1: Laborsystem<br />
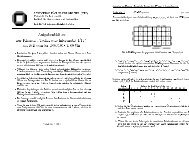
Lage des Körpers ist festgelegt durch 6 Koordinaten<br />
(a) Lage wird offensichtlich bestimmt durch die Lage von 3 Punkten des Körpers P 1 , P 2 , P 3 .<br />
Es gilt, dass 3 Punkten 9 Koordinaten entsprechen, jedoch gibt es 3 Zwangsbedingungen<br />
(Abstände von P 1 , P 2 , P 3 ).<br />
(b) Lage des Schwerpunkts ( ˆ= 3 Koordinaten) , 3 Winkel ( Eulerwinkel).<br />
Lage eines beliebigen Punktes P des Körpers<br />
• bezüglich L.<br />
ˆr = (X, Y, Z)<br />
• bezüglich K<br />
⃗r = (x, y, z)<br />
Bewegung<br />
Infinitesimale Verschiebung von P : durch Verschiebung von K bezüglich L und durch <strong>Dr</strong>ehung<br />
dˆr = dR ⃗ + d ˆϕ × ⃗r (6.1)
6.1. KINEMATIK 51<br />
dˆr ist die Änderung im L-System, d ⃗ R ist die Verschiebung von K, d ˆϕ ist die <strong>Dr</strong>ehumg um<br />
Winkel |d ˆϕ| um die <strong>Dr</strong>ehachse d ˆϕ<br />
|d ˆϕ| .<br />
Geschwindigkeit von P , betrachtet in L mit<br />
dˆr<br />
dt = ⃗v<br />
d ˆϕ<br />
dt = ⃗ Ω<br />
d ⃗ R<br />
dt = ⃗ V<br />
Dann ergibt sich aus (6.1)<br />
⃗v = ⃗ V + ⃗ Ω × ⃗r<br />
Wo<strong>bei</strong> ⃗ V die Translationsbewegung ist, ⃗ Ω die Winkelgeschwindigkeit ist und ⃗r körperfeste<br />
Koordinaten von P sind.<br />
Wähle ein zweites körperfestes System K’, verschoben gegen K.<br />
⃗r = ⃗r 2 + ⃗a<br />
Geschwindigkeit von K’ gegen L sei ⃗ V 2 , Winkelgeschwindigkeit sei ⃗ Ω 2 .<br />
⃗v = ⃗ V + ⃗ Ω × ⃗r<br />
= ⃗ V + ⃗ Ω × ⃗a + ⃗ Ω × ⃗r 2<br />
Anderseits per Definition<br />
für alle ⃗r 2 . Insgesamt ergibt sich also<br />
⃗v = ⃗ V 2 + ⃗ Ω 2 × ⃗r 2<br />
⃗V 2 = ⃗ V + ⃗ Ω × ⃗a<br />
und<br />
⃗Ω 2 = ⃗ Ω<br />
Rotationsgeschwindigkeit eines Körpers ist unabhängig von der Wahl des Systemsnullpunkt,<br />
aber ⃗ V hängt ab vom Nullpunkt.<br />
• ⃗v = ⃗ Ω × ⃗r und ⃗ V 2 = 0
52 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
P<br />
⃗r<br />
• P sei Urpsrung, ⃗r 2 = 0, ⃗ V 2 = ⃗ Ω × ⃗a<br />
P<br />
⃗a<br />
Falls ⃗ V ⊥ ⃗ Ω zu einem bestimmten Zeitpunkt, also<br />
⃗V · ⃗Ω = 0<br />
Also<br />
⃗V 2 ⊥ ⃗ Ω<br />
für beliebiges körperfestes System, da<br />
⃗Ω · ⃗V 2 = Ω ⃗ ( )<br />
⃗V + Ω ⃗ × ⃗a = 0
6.2. TRÄGHEITSTENSOR 53<br />
Ferner gilt in diesem Fall<br />
für alle P, also<br />
⃗Ω · ⃗v = Ω ⃗ ( )<br />
⃗V + Ω ⃗ × ⃗r = 0<br />
⃗Ω ⊥ ⃗v<br />
Falls ⃗ V ⊥ ⃗ Ω, dann kann man ein System O’ finden, so dass ⃗ V 2 = 0 (zu diesem Zeitpunkt).<br />
Konstruktion Es sei ⃗v = ⃗ V + ⃗ Ω × ⃗r. Wähle ⃗r = ⃗r 2 + ⃗a mit ⃗a = − (⃗ V × ⃗ Ω)<br />
| ⃗ Ω| 2 .<br />
⃗v = V ⃗ + Ω ⃗ × ⃗r 2 − Ω ⃗ × ( V ⃗ × Ω) ⃗ 1<br />
| Ω| ⃗ 2<br />
= V ⃗ + Ω ⃗ (<br />
× ⃗r 2 − ⃗V · Ω ⃗ 2 − Ω ⃗ · ( Ω ⃗ · ⃗V<br />
) 1<br />
)<br />
| Ω| ⃗ 2<br />
= Ω × ⃗r 2<br />
Also insgesamt<br />
⃗v = Ω ⃗ × ⃗r 2<br />
<strong>Dr</strong>ehung und Translation des L-System entspricht also einer <strong>Dr</strong>ehung um verschobene<br />
Achse.<br />
6.2 Trägheitstensor<br />
Kinetische Energie<br />
Verwende<br />
T = ∑ i<br />
( ) 2<br />
⃗v i 2 = ⃗V + Ω ⃗ × ⃗r<br />
m i<br />
⃗v 2 i<br />
2<br />
= ⃗ V 2 + 2 ⃗ V ( ⃗ Ω × ⃗r i ) + ( ⃗ Ω × ⃗r i ) 2<br />
= ⃗ V 2 + 2 ⃗ V ( ⃗ Ω × ⃗r i ) + ⃗ Ω 2 ⃗r 2 i − ( ⃗ Ω · ⃗r i ) 2<br />
Also<br />
T = V 2 ∑<br />
m i +<br />
2<br />
i<br />
∑<br />
V ⃗ × Ω ⃗ m i ⃗r i<br />
} {{ }<br />
0 falls O das Schwerpunktsystem ist<br />
i<br />
+ 1 ∑ (<br />
m i ⃗Ω 2 ⃗r i 2 − ( Ω<br />
2<br />
⃗ )<br />
· ⃗r i ) 2<br />
i
54 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
Notation<br />
⃗r i = (x i 1, x i 2, x i 3)<br />
Definiere Trägheitstensor<br />
I jk = ∑ i<br />
∫<br />
( )<br />
m i δjk ⃗r i 2 − x i jx i k =⇒<br />
V<br />
ρ(⃗x)(δ jk ⃗r 2 − x j x k ) dV<br />
Dann kann der zweite Term von T geschrieben werden als<br />
1<br />
2<br />
3∑<br />
Ω j I jk Ω k = 1 ΩI<br />
2 ⃗ Ω ⃗<br />
j,k=1<br />
Definiere weiterhin<br />
m i =⇒<br />
∫<br />
ρ(⃗r)dV<br />
µ = ∑ i<br />
Somit gilt insgesamt<br />
V<br />
T = ⃗ 2<br />
2 µ + 1 ΩI<br />
2 ⃗ Ω ⃗<br />
Der Trägheitstensor ist definiert im Körperfesten System, welches den Ursprung im Schwerpunkt<br />
hat.<br />
V<br />
Eigenschaften des Trägheitstensors<br />
• Reell<br />
• Symmetrisch<br />
Daraus folgt, dass der Trägheitstensor diagonalisierbar ist. Dies entspricht einer <strong>Dr</strong>ehung<br />
des körperfesten Systems. Die neuen Achsen bezeichnet man als Trägheitsachsen. Die Eigenwerte<br />
(I 1 , I 2 , I 3 ) werden als Trägheitsmomente bezeichnet.<br />
T rot = 1 (<br />
I1 Ω 2 1 + I 2 Ω 2 2 + I 3 Ω 2<br />
2<br />
3)<br />
Im allgemeinen<br />
I 1 ≠ I 2 ≠ I 3<br />
(z.b. unsymmetrische Kreisel), falls<br />
I 1 = I 2
6.3. DREHIMPULS 55<br />
ist dies der symmetrische Kreisel. Falls<br />
I 1 = I 2 = I 3<br />
bezeichnet man dies auch als Kugelkreisel. Dies muss nicht unbedingt eine Kugel sein,<br />
einfachstes Beispiel ist ein Würfel.<br />
Falls alle Massenpunkte auf Geraden sind , x 1 = x 2 = 0, x 3 ≠ 0 folgt<br />
I 1 = I 2 = ∑ i<br />
m i<br />
(<br />
x<br />
i<br />
3<br />
) 2<br />
I 3 = 0<br />
Dies nennt man einen Rotator (Beispiel Hantel, 2-Atomiges Molekül).<br />
Es gilt zyklisch<br />
I 1 + I 2 ≥ I 3<br />
Falls alle m i in der (x 1 , x 2 ) Ebene liegen, dann folgt<br />
I 1 + I 2 = I 3<br />
Satz von Steiner<br />
Falls (I 2 ) jk bezüglich O 2 berechnet wird mit ⃗r = ⃗r 2 + ⃗a gilt<br />
(I 2 ) jk = I jk + µ ( δ jk ⃗a 2 − a j a k<br />
)<br />
6.3 <strong>Dr</strong>ehimpuls<br />
Definiere<br />
Sei<br />
⃗L = ⃗r × ⃗p<br />
O = Schwerpunkt des starren Körpers<br />
∑<br />
m i ⃗r i = 0 ⃗r i bezüglich Körperfestem System K<br />
i
56 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
⃗L ≡ Eigendrehimpuls<br />
⃗L = ∑ i<br />
= ∑ i<br />
(<br />
m i (⃗r i × ⃗v i ) − ∑ i<br />
m i<br />
(⃗r i 2 Ω ⃗ )<br />
− ⃗r i (⃗r i Ω)<br />
m i ⃗r i × ( ⃗ Ω × ⃗r i ) + ∑ i<br />
m i (⃗r i × ⃗ V )<br />
)<br />
L j = ∑ k<br />
I jk Ω k<br />
Somit gilt allgemein<br />
⃗L = I ⃗ Ω<br />
Wenn zu einem Zeitpunkt das Koordinatensystem in Richtung der Hauptachsen zeigt, dann<br />
gilt<br />
L 1 = I 1 Ω 1 L 2 = I 2 Ω 2 L 3 = I 3 Ω 3<br />
Richtung von L ⃗ und Ω ⃗ sind im allgemeinem verschieden.<br />
Kräftefreie Bewegung<br />
Dies führt zu<br />
Kugelkreisel<br />
⃗L = const<br />
⃗L = I ⃗ Ω = a · 1 ⃗ Ω =⇒ ⃗ L ∝ ⃗ Ωconst<br />
Wo<strong>bei</strong> a ∈ R. Im Allgemeinen ist ⃗ Ω jedoch nicht konstant
6.4. SYMMETRISCHE KRÄFTEFREIE KREISEL 57<br />
6.4 Symmetrische Kräftefreie Kreisel<br />
Ω ⃗<br />
L ⃗<br />
θ x 3<br />
x 1<br />
von x 3 und L aufgespannte Ebene<br />
Wähle x 1 in L−x ⃗ 3 −Ebene und x 2 senkrecht dazu. L 2 = 0 zu diesem Zeitpunkt =⇒ Ω 2 = 0.<br />
Es gilt<br />
L 1 = I 1 Ω 1 L 2 = I 2 Ω 2 = 0 L 3 = I 3 Ω 3<br />
⃗L, Ω, ⃗ ⃗e x3 liegen immer in einer Ebene.<br />
Allgemein gilt<br />
⃗v i = Ω ⃗ × ⃗r i<br />
für jeden Punkt des Kreisels. Punkte auf der Symmetrieachse liegen in der von ⃗ L und ⃗e x3<br />
aufgespannten Ebene, daraus folgt ⃗v ⊥ Ebene. Daraus ergibt sich, dass die Geschwindigkeit<br />
der Punkte auf der Symmetrieachse dieselbe Richtung hat ( ⃗ Ω × ⃗e x3 )und ist proportional<br />
zum Abstand zum Ursprung. Die Achse rotiert um ⃗ L und der Winkel zwischen ⃗ L und ⃗e 3<br />
bleibt erhalten: reguläre Präzession. Zusätzliche Rotation um x 3 −Achse.<br />
Rotationsgeschwindigkeit um ⃗e 3<br />
I 3 Ω 3 = L 3 = | ⃗ L| cos θ<br />
Ω 3 = |⃗ L|<br />
I 3<br />
cos θ<br />
Präzesionsgeschwindigkeit<br />
Zerlege ⃗ Ω in anteil längs ⃗e 3 und anteil längs ⃗ L
58 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
⃗e 1<br />
⃗ L<br />
⃗ Ω<br />
⃗Ω P r<br />
| ⃗ Ω pr | sin θ = Ω 1 = L 1<br />
Ω 1<br />
θ<br />
⃗e 3<br />
Andererseits<br />
L 1 = | ⃗ L| sin θ<br />
⃗Ω praez = ⃗ L<br />
I 1<br />
I 3<br />
6.5 Bewegungsgleichung des starren Körpers<br />
mit<br />
d<br />
dt ⃗ L = ⃗ M ≡ <strong>Dr</strong>ehmoment<br />
⃗M = ∑ i<br />
⃗r i × ⃗ f i<br />
wo<strong>bei</strong> ⃗ f i die am Ort ⃗r i wirkende Kraft ist.<br />
⃗L und ⃗ M sind bezüglich Schwerpunkt S definiert, in dessen Ruhesystem wir uns befinden.<br />
Ferner gilt<br />
∑<br />
⃗f i = F ⃗ = 0<br />
i
6.5. BEWEGUNGSGLEICHUNG DES STARREN KÖRPERS 59<br />
Bei Verschiebung um ⃗a gilt<br />
⃗M = ⃗ M 2 + ⃗a × ⃗ F<br />
Also falls ⃗ F = 0<br />
⃗M = ⃗ M 2<br />
Eulerschen Gleichungen<br />
Es sei<br />
d<br />
dt ⃗ A die zeitliche Änderung eines Vektors im Laborsystem. Wenn ⃗ A in einem mit ⃗ Ω<br />
rotierendem System konstant bleibt, dann gilt<br />
d<br />
dt ⃗ A = ⃗ Ω × ⃗ A<br />
Wenn sich ⃗ A außerdem im rotierendem System ändert und zwar mit d′<br />
dt ⃗ A, dann gilt<br />
d<br />
dt ⃗ A = d′<br />
dt ⃗ A + ⃗ Ω × ⃗ A<br />
Benutze dies für<br />
d<br />
dt ⃗ L = ⃗ M<br />
d ′<br />
dt ⃗ L + ⃗ Ω × ⃗ L = ⃗ M<br />
Wo<strong>bei</strong> d′ L ⃗ die Änderung im Körperfesten rotierendem System K ist. <strong>Dr</strong>ücke alle Komponenten<br />
im K−System aus, d.h. ( ) d<br />
dt<br />
′<br />
L<br />
dt ⃗ = d dt L j<br />
und<br />
j<br />
⎛ ⎞<br />
I 1 Ω 1<br />
⎜ ⎟<br />
⃗L = ⎝I 2 Ω 2 ⎠<br />
I 3 Ω 3<br />
⎛ ⎞ ⎛ ⎞ ⎛<br />
⎞ ⎛<br />
⎞<br />
Ω 1 I 1 Ω 1 Ω 2 I 3 Ω 3 − Ω 3 I 2 Ω 3 (I 3 − I 2 )Ω 2 Ω 3<br />
⃗Ω × L ⃗ ⎜ ⎟ ⎜ ⎟ ⎜<br />
⎟ ⎜<br />
⎟<br />
= ⎝Ω 2 ⎠ × ⎝I 2 Ω 2 ⎠ = ⎝Ω 3 I 1 Ω 1 − Ω 1 I 3 Ω 3 ⎠ = ⎝(I 1 − I 3 )Ω 1 Ω 2 ⎠<br />
Ω 3 I 3 Ω 3 Ω 1 I 2 Ω 2 − Ω 2 I 1 Ω 1 (I 2 − I 1 )Ω 1 Ω 2
60 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
Somit ergibt sich<br />
Definition Euler-Gleichungen<br />
I 1<br />
dΩ 1<br />
dt + (I 3 − I 2 )Ω 2 Ω 3 = M 1<br />
I 2<br />
dΩ 2<br />
dt + (I 1 − I 3 )Ω 1 Ω 3 = M 2<br />
I 3<br />
dΩ 3<br />
dt + (I 2 − I 1 )Ω 1 Ω 2 = M 3<br />
Falls ⃗ M = 0 und ein symmetrischer Kreisel vorhanden ist, finden wir wieder die Präzesion<br />
aber nun vom K−System her betrachtet.<br />
Dies ist nicht Klausurrelevant<br />
Präzession der Erdachse<br />
⃗L<br />
Sonne<br />
⃗ d<br />
θ<br />
abgeplattet<br />
anziehungsstärker<br />
µ<br />
⃗L<br />
⃗d<br />
⃗r<br />
⃗M liegt in Bahnebene und ist orthogonal zu ⃗ L<br />
µ<br />
anziehungsschwächer<br />
d ⃗ L<br />
dt = ⃗ M<br />
Falls ⃗ M ⊥ ⃗ L gibt es keine Änderung von von ⃗ L 2<br />
d ⃗ L 2<br />
dt<br />
= 2 ⃗ L d⃗ L<br />
dt = 2⃗ L ⃗ M
6.5. BEWEGUNGSGLEICHUNG DES STARREN KÖRPERS 61<br />
Intertialsystem (x, y, z) , Körperfestes System K(x 1 , x 2 , x 3 )<br />
⃗d liegt in (x, y)−Ebene K und S haben Urpsrung im Schwerpunkt der Erde. Kraft auf<br />
Massenpunkt <strong>bei</strong> ⃗r (im K-System)<br />
d ⃗ f = GMdV ϱ(⃗r) ⃗r − ⃗ d<br />
|⃗r − ⃗ d| 3<br />
Da<br />
1<br />
|⃗r − d| ⃗ = 1<br />
3 (⃗r − 2⃗r d ⃗ + d ⃗ ) 3<br />
2 2<br />
| d| ⃗ >> |⃗r|<br />
(<br />
= 1 1 − 2⃗r⃗ d<br />
d 3 d 2<br />
) −<br />
3<br />
+ ⃗r2<br />
2<br />
⃗d 2<br />
= 1 d 3 (<br />
1 + 3 ⃗r⃗ d<br />
d 2 )<br />
⃗M = GM<br />
d 3<br />
= 3GM<br />
d 5<br />
∫<br />
∫<br />
dV ϱ(⃗r)(−⃗r × ⃗ d)(1 + 3 ⃗r⃗ d<br />
d 2 )<br />
dV ϱ(⃗r)( ⃗ d × ⃗r)(⃗r · ⃗d)<br />
Die 1 im letzten Summaden fällt weg, da ∫ ϱrdV = 0 aufgrund der Schwerpunktdefinition.<br />
Hier ist<br />
Umformung von<br />
ersetze<br />
Zwischenresultat<br />
⎛ ⎞<br />
x 1<br />
⎜ ⎟<br />
⃗r = ⎝x 2 ⎠<br />
x 3<br />
( ⃗ d × ⃗r) k (⃗r · ⃗d) = ε ijk d i x j x m dm<br />
x j x m → − ⃗ r 2 δ jm + x j x m<br />
M k = 3GM<br />
d 5 (−I jm )ε ijk d i d m (6.2)
62 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
⃗e z<br />
⃗e 2<br />
⃗e 3<br />
⃗d<br />
23 ◦<br />
⃗e 1 senkrecht<br />
⃗d im Körperfesten System mit<br />
⎛<br />
⎞<br />
cos θ 0 cos Ωt<br />
⎜<br />
⎟<br />
⃗d = d ⎝cos θ 0 sin Ωt⎠<br />
sin θ 0<br />
Eingesetzt in (6.2) ergibt sich<br />
M k = 3GM<br />
d 5<br />
= ⃗ M = 3GM<br />
d 5<br />
(−I jm d m )ε ijk d i<br />
⎛ ⎞ ⎛ ⎞<br />
I 1 d 1 d 1<br />
⎜ ⎟ ⎜ ⎟<br />
⎝I 2 d 2 ⎠ × ⎝d 2 ⎠ (= 0 ⇐⇒ I 1 = I 2 I 3 )<br />
I 3 d 3 d 3<br />
M 1 = 3GM (I<br />
d 5 2 − I 3 )d 2 d 3<br />
⎛<br />
⎞<br />
⃗M = 3GM (I 2 − I 3 )d 2 d 3<br />
⎜<br />
⎟<br />
d 5 ⎝(I 3 − I 1 )d 1 d 3 ⎠<br />
(I 1 − I 2 )d 1 d 2<br />
Nun gilt aber<br />
I 2 = I 1<br />
und somit<br />
M 3 = 0<br />
Setze nun ⃗ d ein
6.5. BEWEGUNGSGLEICHUNG DES STARREN KÖRPERS 63<br />
⎛<br />
⎞<br />
⃗M = 3GM<br />
sin θ 0 cos θ 0 sin Ωt<br />
⎜<br />
(I<br />
d 3 1 − I 3 ) ⎝− sin θ 0 cos θ 0 cos 2 ⎟<br />
Ωt⎠<br />
0<br />
Wo<strong>bei</strong> das Quadrat in der zweiten Komponente ein magisches Quadrat unbekannter Herkunft<br />
ist, das aber benötigt wird.<br />
Der zeitliche Mittelwert ist dann<br />
⎛ ⎞<br />
〈 M〉 ⃗ = 3 0<br />
GM<br />
2 d (I ⎜ ⎟<br />
3 3 − I 1 ) ⎝sin θ 0 cos θ 0 ⎠<br />
0<br />
<strong>Dr</strong>ehung liegt in Bahnebene und senkrecht auf ⃗e 3 ∝ ⃗ L Somit<br />
〈 ⃗ M〉 = cos θ 0 ⃗e 3 × ⃗e z<br />
Damit folgt<br />
Wo<strong>bei</strong><br />
⃗e 3 = ⃗ L<br />
| ⃗ L|<br />
dL<br />
⃗<br />
dt = 〈 M〉 ⃗ = 3 2 GM (I 3 − I 1 )<br />
cos θ<br />
d 3<br />
0 ⃗e 3 × ⃗e z = ωL ⃗ × ⃗e z<br />
ω = 3 GM cos θ 0<br />
2 d 3 L<br />
Die Bewegungsgleichung ist dann<br />
d ⃗ L<br />
dt = ω⃗ L × ⃗e z (6.3)<br />
Betrachte (6.3) im System mit (⃗e 1 , ⃗e 2 ) ˆ= Planetenebene und ⃗e 3 ⊥ Planetenebene.<br />
d<br />
dt<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛<br />
L 1 L 1 0<br />
⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜<br />
⎝L 2 ⎠ = ω ⎝L 2 ⎠ × ⎝0⎠ = ω ⎝<br />
L 3 L 3 1<br />
L 2<br />
−L 1<br />
0<br />
⎞<br />
⎟<br />
⎠
64 KAPITEL 6. STARRER KÖRPER ( KREISEL )<br />
Somit ergeben sich die drei Gleichungen<br />
dL 1<br />
dt<br />
= ωL 2<br />
dL 2<br />
dt<br />
= −ωL 1<br />
dL 3<br />
dt<br />
= 0<br />
Einsetzen ergibt<br />
d 2<br />
dt 2 L 1 + ω 2 L 1 = 0<br />
d 2<br />
dt 2 L 2 + ω 2 L 2 = 0<br />
Somit gilt für die Lösung<br />
L 1 = L 1 (t = 0) cos(ωt)<br />
L 2 = −L 1 (t = 0) sin(ωt)<br />
L 3 = const = L cos θ 0<br />
Auswertung von ω Errinerung<br />
ω = 3 GM I 3 − I 1<br />
cos θ<br />
2 d 3 0<br />
ω tag I 1<br />
Bei einem Ellipsoid gilt<br />
I 3 − I 1<br />
I 1<br />
= a − c<br />
a<br />
=<br />
6378 km − 6357 km<br />
6378 km<br />
= 3.3 · 10 −3<br />
wo<strong>bei</strong> a, c die Halbachsen sind. Nach Kepler<br />
und<br />
Betrag des Mondes<br />
ω Sonne = 3 2<br />
4π 2<br />
T 2 jahr<br />
T 2 = 4π2<br />
GM d3<br />
cos23 ◦ = 0.92<br />
1 Tag<br />
2π 0.923.3 · 10−3 = π 0.92<br />
365 · 10−2 1<br />
Jahr<br />
ν Sonne = ω Sonne<br />
2π<br />
= 1.26 · 10 −5 1<br />
Jahr<br />
M = M Mond<br />
M erde = 81M Mond
6.5. BEWEGUNGSGLEICHUNG DES STARREN KÖRPERS 65<br />
Messung ergibt 25.810 3 Jahre.<br />
µ mond = 2.43 · 10 −5 1<br />
Jahr<br />
µ tot = 3.7 · 10 −5 1<br />
Jahr =⇒ µ−1 = 27 · 10 3 Jare
66 KAPITEL 6. STARRER KÖRPER ( KREISEL )
Kapitel 7<br />
Anhang<br />
7.1 Literaturempfehlungen<br />
• Goldstein<br />
• Landau-Lifschitz<br />
• Nolting<br />
• Fließbach<br />
• Honerkamp und Römer<br />
67