Gecko3 - CCC Event Weblog
Gecko3 - CCC Event Weblog
Gecko3 - CCC Event Weblog

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
6. Firmware<br />
6.7.1. Read Waveform<br />
Bevor die Firmware die Read Waveform aufruft, kontrollieren wir ob sich das GPIF im<br />
Idle Status befindet. Das interne FIFO Flag im GPIF wird dann so eingestellt, dass es<br />
der EP6 FIFO Buffer setzt wenn er voll ist. Erst jetzt wird die Read Waveform gestartet.<br />
Solange die Firmware kein Timeout auslöst, warten wir auf das Done Bit vom GPIF. Das<br />
Interface setzt dieses Bit falls es von einer Waveform in den Idle Status zurückkehrt. Verweilt<br />
die Statemachine zulange im selben Status wird der Timeout ausgelöst und die Waveform<br />
abgebrochen. Somit erzwingt man ein Setzen des Done Bits. Dies geschieht regelmässig, da<br />
die Read Waveform periodisch aufgerufen wird, um zu kontrollieren ob der FPGA Daten<br />
senden will. Sendet er nichts bleibt die Waveform solange im S0 Status bis das Timeout sie<br />
abbricht. Das General Propose Interface übernimmt das gesammte USB Handling. Erst am<br />
Ende der Übertragung muss der Endpoint, falls der FIFO Buffer nicht gefüllt ist, von der<br />
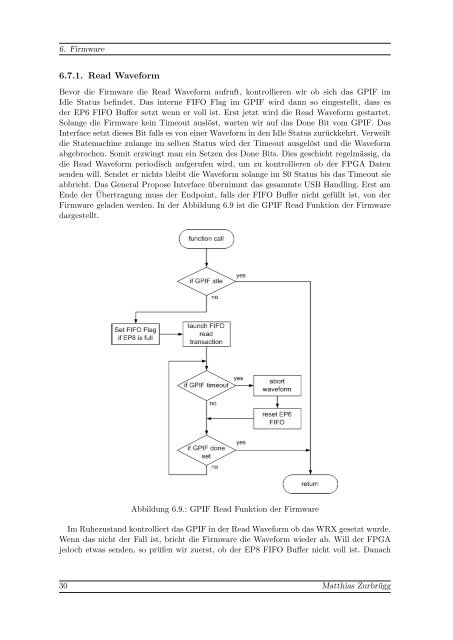
Firmware geladen werden. In der Abbildung 6.9 ist die GPIF Read Funktion der Firmware<br />
dargestellt.<br />
Abbildung 6.9.: GPIF Read Funktion der Firmware<br />
Im Ruhezustand kontrolliert das GPIF in der Read Waveform ob das WRX gesetzt wurde.<br />
Wenn das nicht der Fall ist, bricht die Firmware die Waveform wieder ab. Will der FPGA<br />
jedoch etwas senden, so prüfen wir zuerst, ob der EP8 FIFO Buffer nicht voll ist. Danach<br />
30 Matthias Zurbrügg