Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ...
Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ... Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ...
82 KAPITEL 5. PUNKTPROZESSE ein ganzzahliges Vielfaches von der Frequenz des zweiten Generators unterscheidet. Ebenso sind X und Y (stochastisch) abhängig, wenn diese ungekoppelt sind, aber von einem dritten Prozess Z getriggert werden. Damit von Abhängigkeit auf Kopplung geschlossen werden darf, müssen Fälle wie diese ausgeschlossen werden. In den meisten Fällen ist solch eine Schlussfolgerung möglich, wenn eine entsprechende Modellvorstellung der zu untersuchenden Systeme zugrunde liegt. 5.4 Nachweis von Abhängigkeiten mittels Zuwächsen 5.4.1 Abhängigkeitsnachweis über Zuwächse Da es sich bei den Pfaden der Punktprozesse um monoton wachsende Funktionen handelt (siehe Abb. 5.2), können die Wahrscheinlichkeiten in Gl. (5.18) nur dann geschätzt werden, wenn eine ausreichende Anzahl von Beobachtungen vorliegt. Anders sieht es mit den Zuwächsen aus. Sind die zugrundeliegende Dynamik der Punktprozesse X und Y sowie die Kopplung zwischen ihnen zeitunabhängig, sind also die Zuwachse X ti −X ti −∆ und X ti+1 −X ti+1 −∆ stationär verteilt, so lautet ein Schätzer für die Verteilung der Zuwächse X t − X t−∆ bezüglich des Zeitfensters (t − ∆, t] P {X t − X t−∆ = x} ≈ 1 n n∑ δ(X ti (ω) − X ti −∆(ω), x) . i=1 Dementsprechend kann die Verteilung eines stationär verteilten Zuwachses aus einer Beobachtung geschätzt werden. Um ein Kriterium für Abhängigkeit zu erhalten, wird zunächst Gl. (5.18) von Ereigniszahlen auf Zuwächse umgeschrieben. Hierzu ist lediglich zu berücksichtigen, dass die Subtraktion eine stetige Abbildung ist. Folglich ist im Falle der Unabhängigkeit auch die gemeinsame Verteilung der Zuwächse von X und Y stochastisch unabhängig [Bauer (1991), Behnen & Neuhaus (1995), Billingsley (1995)]: P Xt i+1 −Xt i ,...,Xt 2 −Xt 1 , Ys j −Ys j−1 ,...,Ys 2 −Ys 1 = P Xt i+1 −Xt i ,...,Xt 2 −Xt 1 ⊗ P Y sj −Y sj−1 ,...,Y s2 −Y s1 , (5.19) mit beliebigen 0 ≤ t 1 < . . . < t i < t i+1 , 0 ≤ s 1 < . . . < s j und i, j ∈ N. Die Abhängigkeit X ti+1 − X ti von X ti − X ti−1 , . . . und Y ti+1 − Y ti , . . . ist in Abb. 5.5 illustriert, wobei s j = t i+1 , . . . ist. Durch Ausintegrieren von Gl. (5.19) folgt unmittelbar, dass die Punktprozesse X und Y nicht unabhängig sein können, wenn für beliebige 0 ≤ t i−1 < t i und 0 ≤ s j−1 < s j die Zuwächse X ti − X ti−1 und Y sj − Y sj−1 voneinander abhängen,
5.4. NACHWEIS VON ABHÄNGIGKEITEN MITTELS ZUWÄCHSEN 83 X Y X t i−1 −X t i−2 Xt i −X t i−1 X t i+1 −X t i t Tk−2 Tk−1 Tk Tk+1 Y t i−1 −Y t i−2 Yt i −Y t i−1 Yt i+1 −Yt i t S S S S S S l−3 l−2 l−1 l l+1 l+2 ∆ t t t t i−2 i−1 i i+1 Abbildung 5.5: Abhängigkeit zwischen den Zuwächsen zweier Punktprozesse. Die Pfeile symbolisieren Abhängigkeiten bzw. Informationsaustausch zwischen den Zuwächsen von X und Y . Nicht alle Abhängigkeiten sind eingezeichnet. Die Zeitpunkte t i wurden äquidistant gewählt (t i+1 − t i = ∆). das heißt wenn die Gleichung P {X ti − X ti−1 = x, Y sj − Y sj−1 = y} = P {X ti − X ti−1 = x} · P {Y sj − Y sj−1 = y} (5.20) für irgendein x, y ∈ N 0 nicht erfüllt ist. Zur Überprüfung der Gültigkeit von Gl. (5.20) ist es ausreichend, die gegenseitige Information M(X ti − X ti−1 , Y sj − Y sj−1 ) zwischen den Zuwächsen zu berechnen (siehe Gl. (2.9) in Absch. 2.1.1). Ist diese größer als Null, so sind beide Prozesse voneinander abhängig. In dem Fall, dass die gegenseitige Information der Zuwächse Null ist, kann keine Aussage getroffen werden. Eventuell wurden die Zeitpunkte t i−1 , t i , s j−1 , s j nur ungünstig gewählt, so dass lediglich X ti −X ti−1 und Y sj − Y sj−1 unabhängig sind. Beispiel: Gekoppelte Hindmarsh-Rose-Oszillatoren. Im Folgenden soll am Beispiel zweier gekoppelter Hindmarsch-Rose-Oszillatoren [Hindmarsh & Rose (1984)] demonstriert werden, wie mittels Gl. (5.20) eine Abhängigkeit zwischen den beiden Oszillatoren nachgewiesen werden kann. Ein (ungekoppelter) Hindmarsh-Rose-Oszillator Y ist durch ein dreidimensionales System von nichtlinearen gewöhnlichen Differentialgleichungen ge-
- Seite 37 und 38: Kapitel 3 Schätzen von Entropien u
- Seite 39 und 40: 3.1. SCHÄTZEN BEI EINER UND MEHRER
- Seite 41 und 42: 3.2. SCHÄTZER FÜR DISKRETE PROZES
- Seite 43 und 44: 3.3. PARTITIONIERUNG DES ZUSTANDSRA
- Seite 45 und 46: 3.3. PARTITIONIERUNG DES ZUSTANDSRA
- Seite 47 und 48: 3.3. PARTITIONIERUNG DES ZUSTANDSRA
- Seite 49 und 50: 3.4. PARAMETRISCHE VERTEILUNGEN 43
- Seite 51 und 52: 3.5. KONTINUIERLICHES BEISPIEL: AR(
- Seite 53 und 54: 3.6. KERNSCHÄTZER FÜR DICHTEN 47
- Seite 55 und 56: 3.6. KERNSCHÄTZER FÜR DICHTEN 49
- Seite 57 und 58: 3.6. KERNSCHÄTZER FÜR DICHTEN 51
- Seite 59 und 60: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 61 und 62: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 63 und 64: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 65 und 66: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 67 und 68: Kapitel 4 Exkurs: Dynamische System
- Seite 69 und 70: 4.1. ENTROPIE EINES DYNAMISCHEN SYS
- Seite 71 und 72: 4.1. ENTROPIE EINES DYNAMISCHEN SYS
- Seite 73 und 74: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 75 und 76: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 77 und 78: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 79 und 80: Kapitel 5 Punktprozesse 5.1 Definit
- Seite 81 und 82: 5.1. DEFINITION EINES PUNKTPROZESSE
- Seite 83 und 84: 5.2. MOMENTE UND EREIGNISRATEN 77 2
- Seite 85 und 86: 5.3. GEKOPPELTE PUNKTPROZESSE 79 Be
- Seite 87: 5.3. GEKOPPELTE PUNKTPROZESSE 81 f
- Seite 91 und 92: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 93 und 94: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 95 und 96: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 97 und 98: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 99 und 100: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 101 und 102: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 103 und 104: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 105 und 106: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 107 und 108: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 109 und 110: 5.6. ABHÄNGIGKEITSNACHWEIS ÜBER E
- Seite 111 und 112: 5.6. ABHÄNGIGKEITSNACHWEIS ÜBER E
- Seite 113 und 114: 5.6. ABHÄNGIGKEITSNACHWEIS ÜBER E
- Seite 115 und 116: Kapitel 6 Zusammenfassung Die Besti
- Seite 117 und 118: 111 zwischen zwei Prozessen nachgew
- Seite 119 und 120: Anhang A Mathematische Werkzeuge De
- Seite 121 und 122: 115 Dies ist die Log-Summen-Ungleic
- Seite 123 und 124: Literaturverzeichnis [Arnhold et al
- Seite 125 und 126: LITERATURVERZEICHNIS 119 [Hindmarsh
- Seite 127 und 128: LITERATURVERZEICHNIS 121 [Rosenblum
- Seite 129: LITERATURVERZEICHNIS 123 Danksagung
5.4. NACHWEIS VON ABHÄNGIGKEITEN MITTELS ZUWÄCHSEN 83<br />
X<br />
Y<br />
X t i−1<br />
−X t i−2<br />
Xt<br />
i<br />
−X t i−1<br />
X t i+1<br />
−X t i<br />
t<br />
Tk−2<br />
Tk−1 Tk Tk+1<br />
Y t i−1<br />
−Y t i−2<br />
Yt i<br />
−Y t i−1<br />
Yt i+1<br />
−Yt<br />
i<br />
t<br />
S<br />
S<br />
S S<br />
S<br />
S<br />
l−3 l−2 l−1 l<br />
l+1<br />
l+2<br />
∆<br />
t t t t<br />
i−2 i−1 i i+1<br />
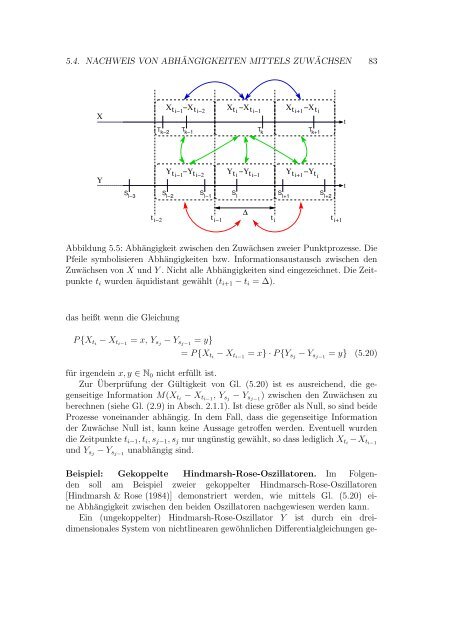
Abbildung 5.5: Abhängigkeit zwischen den Zuwächsen zweier Punktprozesse. Die<br />
Pfeile symbolisieren <strong>Abhängigkeiten</strong> bzw. Informationsaustausch zwischen den<br />
Zuwächsen <strong>von</strong> X <strong>und</strong> Y . Nicht alle <strong>Abhängigkeiten</strong> sind eingezeichnet. Die Zeitpunkte<br />
t i wurden äquidistant gewählt (t i+1 − t i = ∆).<br />
das heißt wenn die Gleichung<br />
P {X ti − X ti−1 = x, Y sj − Y sj−1 = y}<br />
= P {X ti − X ti−1 = x} · P {Y sj − Y sj−1 = y} (5.20)<br />
für irgendein x, y ∈ N 0 nicht erfüllt ist.<br />
Zur Überprüfung der Gültigkeit <strong>von</strong> Gl. (5.20) ist es ausreichend, die gegenseitige<br />
Information M(X ti − X ti−1 , Y sj − Y sj−1 ) zwischen den Zuwächsen zu<br />
berechnen (siehe Gl. (2.9) in Absch. 2.1.1). Ist diese größer als Null, so sind beide<br />
Prozesse <strong>von</strong>einander abhängig. In dem Fall, dass die gegenseitige Information<br />
der Zuwächse Null ist, kann keine Aussage getroffen werden. Eventuell wurden<br />
die Zeitpunkte t i−1 , t i , s j−1 , s j nur ungünstig gewählt, so dass lediglich X ti −X ti−1<br />
<strong>und</strong> Y sj − Y sj−1 unabhängig sind.<br />
Beispiel: Gekoppelte Hindmarsh-Rose-Oszillatoren. Im Folgenden<br />
soll am Beispiel zweier gekoppelter Hindmarsch-Rose-Oszillatoren<br />
[Hindmarsh & Rose (1984)] demonstriert werden, wie mittels Gl. (5.20) eine<br />
Abhängigkeit zwischen den beiden Oszillatoren nachgewiesen werden kann.<br />
Ein (ungekoppelter) Hindmarsh-Rose-Oszillator Y ist durch ein dreidimensionales<br />
System <strong>von</strong> nichtlinearen gewöhnlichen Differentialgleichungen ge-


