Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ...
Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ... Nichtlineare Methoden zur Quantifizierung von Abhängigkeiten und ...
102 KAPITEL 5. PUNKTPROZESSE 12-dimensionalen Zustandsraum geschätzt werden muss. Auch die Werte der Transferentropie für τ = ∆, die den stärksten Einfluss eines Zuwachses von Y auf einen Zuwachs von X angibt, sind biasbehaftet, siehe Abb. 5.17. Daher fallen sie ebenfalls mit der Länge der Zeitreihe ab, allerdings deutlich langsamer als die Transferentropie für τ = τ ∞ . Insbesondere klaffen beide Transferentropien für g > 0 mit der Zeitreihenlänge immer weiter auseinander, da die Transferentropie für τ = ∆ aufgrund der Kopplung gegen einen Wert größer als Null konvergieren sollte. Eventuell kann der Bias nach unten korregiert werden, indem die gleiche Korrektur wie bei den Kernschätzern, siehe Absch. 3.6, gemacht wird. Dies bedeutet bei der Berechnung der Transferentropie, Gl. (3.8), werden in der Summation nur solche Terme berücksichtigt, für die eine ausreichende Anzahl von Punkten zum Schätzen der Verteilungen zur Verfügung steht. Diese Korrektur konnte leider noch nicht implementiert werden. Für die Kopplungsstärke 0 ≤ g ≤ 0.5 wurde die Analyse mit einer Fensterbreite von ∆ = 50 wiederholt. Dies lieferte quantitativ die gleichen Ergebnisse wie bei ∆ = 50, wobei jetzt k ≥ 4 und l ≥ 4 zu wählen sind, damit die Transferentropie, angewendet auf Zuwächse, die Modellstruktur richtig wiedergibt. 5.6 Abhängigkeitsnachweis über Ereignisintervalle Die bisher vorgestellten Methoden zum Nachweis von Abhängigkeiten zwischen Punktprozessen basieren auf der Untersuchung der Ereigniszahlen innerhalb eines Zeitintervalls, also auf den Zuwächsen von Punktprozessen. In diesem Abschnitt soll eine andere Herangehensweise vorgestellt werden, bei der der Nachweis von Abhängigkeiten auf Ereignisintervalle, gemeint sind Zeitintervalle zwischen den Ereignissen, basiert. Wie bereits in Absch. 5.3 dargelegt wurde, hängt im Allgemeinen die Ankunftszeit T k+1 (ω) des (k+1)-ten Ereignisses des Punktprozesses X von den Zeitpunkten seiner vorherigen Ereignisse T k (ω), T k−1 (ω), . . . ab. Koppelt zusätzlich Y in X, so wird T k+1 (ω) auch von den Ereignissen S jk+1 −1(ω), S jk+1 −2(ω), . . . von Y beeinflusst, die vor T k+1 (ω) auftraten. Dabei kennzeichnet der Index j k+1 (ω) jenes Ereignis S l (ω) von Y , das dem Ereignis T k+1 (ω) folgt, j k+1 (ω) = min{l ∈ N 0 : S l (ω) ≥ T k+1 (ω)}. Wird der Zeitpunkt T k (ω) als Referenzzeit verwendet, so bedeutet dies, dass die Länge der Wartezeit D k+1 (ω) = T k+1 (ω) − T k (ω) von den Intra-Intervallen D (i) k (ω) = T k(ω) − T k−i (ω) , i = 1, 2, 3, . . . (5.33) und im gekoppelten Fall zusätzlich von den Kreuz-Intervallen E (i) k (ω) = S j k +i(ω) − T k (ω) , i = 0, ±1, ±2, . . . (5.34)
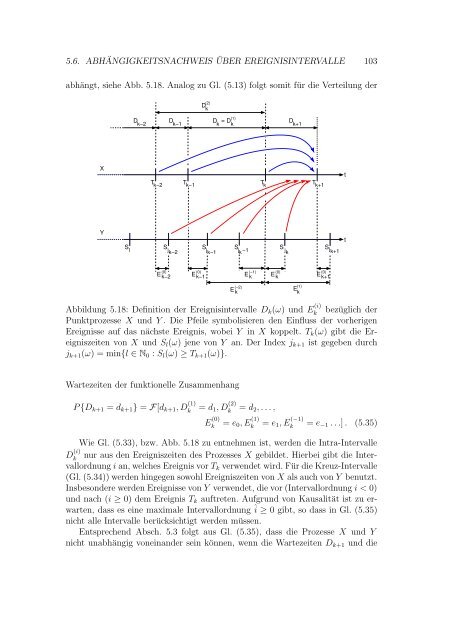
5.6. ABHÄNGIGKEITSNACHWEIS ÜBER EREIGNISINTERVALLE 103 abhängt, siehe Abb. 5.18. Analog zu Gl. (5.13) folgt somit für die Verteilung der (2) D k D k−2 D k−1 (1) D k = D k D k+1 X Tk−2 Tk−1 Tk Tk+1 t Y S S S S S S l j k−2 j k−1 j k−1 j j k k+1 t (0) Ek−2 (0) Ek−1 (−1) Ek E (0) k E (0) k+1 (−2) Ek (1) E k Abbildung 5.18: Definition der Ereignisintervalle D k (ω) und E (i) k bezüglich der Punktprozesse X und Y . Die Pfeile symbolisieren den Einfluss der vorherigen Ereignisse auf das nächste Ereignis, wobei Y in X koppelt. T k (ω) gibt die Ereigniszeiten von X und S l (ω) jene von Y an. Der Index j k+1 ist gegeben durch j k+1 (ω) = min{l ∈ N 0 : S l (ω) ≥ T k+1 (ω)}. Wartezeiten der funktionelle Zusammenhang P {D k+1 = d k+1 } = F[d k+1 , D (1) k = d 1 , D (2) k = d 2 , . . . , E (0) k = e 0 , E (1) k = e 1 , E (−1) k = e −1 . . .] . (5.35) Wie Gl. (5.33), bzw. Abb. 5.18 zu entnehmen ist, werden die Intra-Intervalle D (i) k nur aus den Ereigniszeiten des Prozesses X gebildet. Hierbei gibt die Intervallordnung i an, welches Ereignis vor T k verwendet wird. Für die Kreuz-Intervalle (Gl. (5.34)) werden hingegen sowohl Ereigniszeiten von X als auch von Y benutzt. Insbesondere werden Ereignisse von Y verwendet, die vor (Intervallordnung i < 0) und nach (i ≥ 0) dem Ereignis T k auftreten. Aufgrund von Kausalität ist zu erwarten, dass es eine maximale Intervallordnung î ≥ 0 gibt, so dass in Gl. (5.35) nicht alle Intervalle berücksichtigt werden müssen. Entsprechend Absch. 5.3 folgt aus Gl. (5.35), dass die Prozesse X und Y nicht unabhängig voneinander sein können, wenn die Wartezeiten D k+1 und die
- Seite 57 und 58: 3.6. KERNSCHÄTZER FÜR DICHTEN 51
- Seite 59 und 60: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 61 und 62: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 63 und 64: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 65 und 66: 3.7. RÄUMLICHE ABHÄNGIGKEIT DES W
- Seite 67 und 68: Kapitel 4 Exkurs: Dynamische System
- Seite 69 und 70: 4.1. ENTROPIE EINES DYNAMISCHEN SYS
- Seite 71 und 72: 4.1. ENTROPIE EINES DYNAMISCHEN SYS
- Seite 73 und 74: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 75 und 76: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 77 und 78: 4.2. INTERDEPENDENZ, VERALLGEMEINER
- Seite 79 und 80: Kapitel 5 Punktprozesse 5.1 Definit
- Seite 81 und 82: 5.1. DEFINITION EINES PUNKTPROZESSE
- Seite 83 und 84: 5.2. MOMENTE UND EREIGNISRATEN 77 2
- Seite 85 und 86: 5.3. GEKOPPELTE PUNKTPROZESSE 79 Be
- Seite 87 und 88: 5.3. GEKOPPELTE PUNKTPROZESSE 81 f
- Seite 89 und 90: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 91 und 92: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 93 und 94: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 95 und 96: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 97 und 98: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 99 und 100: 5.4. NACHWEIS VON ABHÄNGIGKEITEN M
- Seite 101 und 102: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 103 und 104: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 105 und 106: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 107: 5.5. NACHWEIS VON KOPPLUNG MITTELS
- Seite 111 und 112: 5.6. ABHÄNGIGKEITSNACHWEIS ÜBER E
- Seite 113 und 114: 5.6. ABHÄNGIGKEITSNACHWEIS ÜBER E
- Seite 115 und 116: Kapitel 6 Zusammenfassung Die Besti
- Seite 117 und 118: 111 zwischen zwei Prozessen nachgew
- Seite 119 und 120: Anhang A Mathematische Werkzeuge De
- Seite 121 und 122: 115 Dies ist die Log-Summen-Ungleic
- Seite 123 und 124: Literaturverzeichnis [Arnhold et al
- Seite 125 und 126: LITERATURVERZEICHNIS 119 [Hindmarsh
- Seite 127 und 128: LITERATURVERZEICHNIS 121 [Rosenblum
- Seite 129: LITERATURVERZEICHNIS 123 Danksagung
5.6. ABHÄNGIGKEITSNACHWEIS ÜBER EREIGNISINTERVALLE 103<br />
abhängt, siehe Abb. 5.18. Analog zu Gl. (5.13) folgt somit für die Verteilung der<br />
(2)<br />
D<br />
k<br />
D<br />
k−2<br />
D<br />
k−1<br />
(1)<br />
D<br />
k = D k<br />
D<br />
k+1<br />
X<br />
Tk−2 Tk−1<br />
Tk Tk+1<br />
t<br />
Y<br />
S<br />
S<br />
S S<br />
S<br />
S<br />
l j k−2 j k−1 j k−1<br />
j j k<br />
k+1<br />
t<br />
(0)<br />
Ek−2<br />
(0)<br />
Ek−1<br />
(−1)<br />
Ek<br />
E<br />
(0) k E<br />
(0)<br />
k+1<br />
(−2)<br />
Ek<br />
(1)<br />
E<br />
k<br />
Abbildung 5.18: Definition der Ereignisintervalle D k (ω) <strong>und</strong> E (i)<br />
k<br />
bezüglich der<br />
Punktprozesse X <strong>und</strong> Y . Die Pfeile symbolisieren den Einfluss der vorherigen<br />
Ereignisse auf das nächste Ereignis, wobei Y in X koppelt. T k (ω) gibt die Ereigniszeiten<br />
<strong>von</strong> X <strong>und</strong> S l (ω) jene <strong>von</strong> Y an. Der Index j k+1 ist gegeben durch<br />
j k+1 (ω) = min{l ∈ N 0 : S l (ω) ≥ T k+1 (ω)}.<br />
Wartezeiten der funktionelle Zusammenhang<br />
P {D k+1 = d k+1 } = F[d k+1 , D (1)<br />
k<br />
= d 1 , D (2)<br />
k<br />
= d 2 , . . . ,<br />
E (0)<br />
k<br />
= e 0 , E (1)<br />
k<br />
= e 1 , E (−1)<br />
k<br />
= e −1 . . .] . (5.35)<br />
Wie Gl. (5.33), bzw. Abb. 5.18 zu entnehmen ist, werden die Intra-Intervalle<br />
D (i)<br />
k<br />
nur aus den Ereigniszeiten des Prozesses X gebildet. Hierbei gibt die Intervallordnung<br />
i an, welches Ereignis vor T k verwendet wird. Für die Kreuz-Intervalle<br />
(Gl. (5.34)) werden hingegen sowohl Ereigniszeiten <strong>von</strong> X als auch <strong>von</strong> Y benutzt.<br />
Insbesondere werden Ereignisse <strong>von</strong> Y verwendet, die vor (Intervallordnung i < 0)<br />
<strong>und</strong> nach (i ≥ 0) dem Ereignis T k auftreten. Aufgr<strong>und</strong> <strong>von</strong> Kausalität ist zu erwarten,<br />
dass es eine maximale Intervallordnung î ≥ 0 gibt, so dass in Gl. (5.35)<br />
nicht alle Intervalle berücksichtigt werden müssen.<br />
Entsprechend Absch. 5.3 folgt aus Gl. (5.35), dass die Prozesse X <strong>und</strong> Y<br />
nicht unabhängig <strong>von</strong>einander sein können, wenn die Wartezeiten D k+1 <strong>und</strong> die


