Deutsch - Auma.com
Deutsch - Auma.com Deutsch - Auma.com
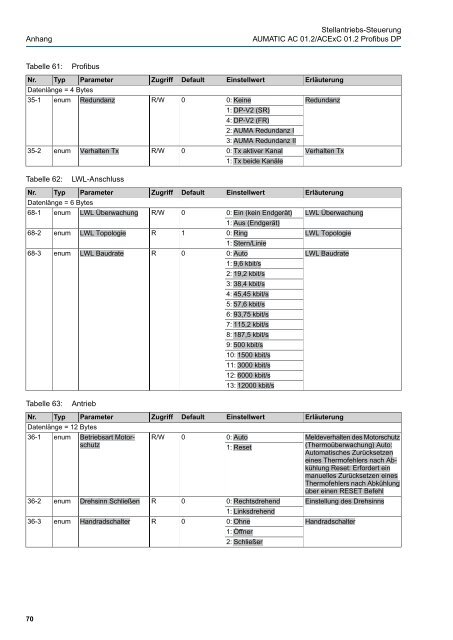
Anhang Stellantriebs-Steuerung AUMATIC AC 01.2/ACExC 01.2 Profibus DP Tabelle 61: Profibus Nr. Typ Datenlänge = 4 Bytes 35-1 35-2 enum enum Parameter Redundanz Verhalten Tx Zugriff R/W R/W Default 0 0 Einstellwert 0: Keine 1: DP-V2 (SR) 4: DP-V2 (FR) 2: AUMA Redundanz I 3: AUMA Redundanz II 0: Tx aktiver Kanal 1: Tx beide Kanäle Erläuterung Redundanz Verhalten Tx Tabelle 62: LWL-Anschluss Nr. Typ Datenlänge = 6 Bytes 68-1 68-2 68-3 enum enum enum Parameter LWL Überwachung LWL Topologie LWL Baudrate Zugriff R/W R R Default 0 1 0 Einstellwert 0: Ein (kein Endgerät) 1: Aus (Endgerät) 0: Ring 1: Stern/Linie 0: Auto 1: 9,6 kbit/s 2: 19,2 kbit/s 3: 38,4 kbit/s 4: 45,45 kbit/s 5: 57,6 kbit/s 6: 93,75 kbit/s 7: 115,2 kbit/s 8: 187,5 kbit/s 9: 500 kbit/s 10: 1500 kbit/s 11: 3000 kbit/s 12: 6000 kbit/s 13: 12000 kbit/s Erläuterung LWL Überwachung LWL Topologie LWL Baudrate Tabelle 63: Antrieb Nr. Typ Parameter Datenlänge = 12 Bytes 36-1 36-2 36-3 enum enum enum Betriebsart Motorschutz Drehsinn Schließen Handradschalter Zugriff R/W R R Default 0 0 0 Einstellwert 0: Auto 1: Reset 0: Rechtsdrehend 1: Linksdrehend 0: Ohne 1: Öffner 2: Schließer Erläuterung Meldeverhalten des Motorschutz (Thermoüberwachung) Auto: Automatisches Zurücksetzen eines Thermofehlers nach Abkühlung Reset: Erfordert ein manuelles Zurücksetzen eines Thermofehlers nach Abkühlung über einen RESET Befehl Einstellung des Drehsinns Handradschalter 70
Stellantriebs-Steuerung AUMATIC AC 01.2/ACExC 01.2 Profibus DP Anhang Nr. Typ Parameter Zugriff Default Einstellwert Erläuterung 36-4 enum Überw. Heizung R 0 0: Funktion nicht aktiv 1: Funktion aktiv Überwachung der Heizung im Stellantrieb 36-5 U32 Überw.Zeit Heizung R 3000 Min = 600 [0,1 s] Max = 36000 [0,1 s] Überwachungzeit der Heizung bzw. des Heizsystems (die Warnung "Wrn Heizung" wird gemeldet wenn während dieser Zeit kontinuierlich ein Fehler vorliegt) Tabelle 64: MWG Nr. Typ Parameter Zugriff Default Einstellwert Erläuterung Datenlänge = 44 Bytes 37-1 U16 Nennmoment ZU R 100 Min = 0 [Nm] Max = 65535 [Nm] Einstellung des Nennmoment ZU in Nm 37-2 U16 Nennmoment AUF R 100 Min = 0 [Nm] Max = 65535 [Nm] Einstellung des Nennmoment AUF in Nm 37-3 U16 ZU min. Winkelwert R 120 Min = 65 Max = 125 Drehmomentstützpunkt ZU (minimaler Winkelwert) 37-4 U16 ZU min. Drehmoment R 50 Min = 20 [%] Max = 80 [%] Drehmomentstützpunkt ZU (minimales Drehmoment) 37-5 U16 ZU max. Winkelwert R 105 Min = 8 Max = 122 Drehmomentstützpunkt ZU (maximaler Winkelwert) 37-6 U16 ZU max. Drehmoment R 100 Min = 80 [%] Max = 125 [%] Drehmomentstützpunkt ZU (maximales Drehmoment) 37-7 U16 AUF min. Winkelwert R 134 Min = 129 Max = 189 Drehmomentstützpunkt AUF (minimaler Winkelwert) 37-8 U16 AUF min. Drehmoment R 50 Min = 20 [%] Max = 80 [%] Drehmomentstützpunkt AUF (minimales Drehmoment) 37-9 U16 AUF max. Winkelwert R 149 Min = 132 Max = 247 Drehmomentstützpunkt AUF (maximaler Winkelwert) 37-10 U16 AUF max. Drehmoment R 100 Min = 80 [%] Max = 125 [%] Drehmomentstützpunkt AUF (maximales Drehmoment) 37-11 U16 Korrektur ZU R 100 Min = 80 Max = 120 Korrekturfaktor für Drehmomentkennlinie ZU 37-12 U16 Korrektur AUF R 100 Min = 80 Max = 120 Korrekturfaktor für Drehmomentkennlinie AUF 37-13 U16 Hysterese Drehmo R 5 Min = 0 Max = 20 Hysterese der Drehmomentschaltung 37-14 U16 Totbereich Drehmo R 2 Min = 2 Max = 20 Totbereich der Drehmomentschaltung 37-15 U16 Hysterese Weg R 3 Min = 0 Hysterese der Wegschaltung Max = 100 37-16 U16 Drehmo Nullpkt. Abgleich R 0 Min = 20 Max = 20 Drehmoment Nullpunkt Abgleich 37-17 U16 Low-Limit Drehmo ZU R 20 Min = 0 [Nm] Max = 65535 [Nm] Einstellung Low-Limit (Anfangswert) für Abschaltdrehmoment ZU 37-18 U16 High-Limit Drehmo ZU R 100 Min = 0 [Nm] Max = 65535 [Nm] Einstellung High-Limit (Endwert) für Abschaltdrehmoment ZU 71
- Seite 19 und 20: Stellantriebs-Steuerung AUMATIC AC
- Seite 21 und 22: Stellantriebs-Steuerung AUMATIC AC
- Seite 23 und 24: Stellantriebs-Steuerung AUMATIC AC
- Seite 25 und 26: Stellantriebs-Steuerung AUMATIC AC
- Seite 27 und 28: Stellantriebs-Steuerung AUMATIC AC
- Seite 29 und 30: Stellantriebs-Steuerung AUMATIC AC
- Seite 31 und 32: Stellantriebs-Steuerung AUMATIC AC
- Seite 33 und 34: Stellantriebs-Steuerung AUMATIC AC
- Seite 35 und 36: Stellantriebs-Steuerung AUMATIC AC
- Seite 37 und 38: Stellantriebs-Steuerung AUMATIC AC
- Seite 39 und 40: Stellantriebs-Steuerung AUMATIC AC
- Seite 41 und 42: Stellantriebs-Steuerung AUMATIC AC
- Seite 43 und 44: Stellantriebs-Steuerung AUMATIC AC
- Seite 45 und 46: Stellantriebs-Steuerung AUMATIC AC
- Seite 47 und 48: Stellantriebs-Steuerung AUMATIC AC
- Seite 49 und 50: Stellantriebs-Steuerung AUMATIC AC
- Seite 51 und 52: Stellantriebs-Steuerung AUMATIC AC
- Seite 53 und 54: Stellantriebs-Steuerung AUMATIC AC
- Seite 55 und 56: Stellantriebs-Steuerung AUMATIC AC
- Seite 57 und 58: Stellantriebs-Steuerung AUMATIC AC
- Seite 59 und 60: Stellantriebs-Steuerung AUMATIC AC
- Seite 61 und 62: Stellantriebs-Steuerung AUMATIC AC
- Seite 63 und 64: Stellantriebs-Steuerung AUMATIC AC
- Seite 65 und 66: Stellantriebs-Steuerung AUMATIC AC
- Seite 67 und 68: Stellantriebs-Steuerung AUMATIC AC
- Seite 69: Stellantriebs-Steuerung AUMATIC AC
- Seite 73 und 74: Stellantriebs-Steuerung AUMATIC AC
- Seite 75 und 76: Stellantriebs-Steuerung AUMATIC AC
- Seite 77 und 78: Stellantriebs-Steuerung AUMATIC AC
- Seite 79 und 80: Stellantriebs-Steuerung AUMATIC AC
- Seite 81 und 82: Stellantriebs-Steuerung AUMATIC AC
- Seite 83 und 84: Stellantriebs-Steuerung AUMATIC AC
- Seite 85 und 86: Stellantriebs-Steuerung AUMATIC AC
- Seite 87 und 88: AUMA - weltweit Afrika AUMA South A
Anhang<br />
Stellantriebs-Steuerung<br />
AUMATIC AC 01.2/ACExC 01.2 Profibus DP<br />
Tabelle 61:<br />
Profibus<br />
Nr.<br />
Typ<br />
Datenlänge = 4 Bytes<br />
35-1<br />
35-2<br />
enum<br />
enum<br />
Parameter<br />
Redundanz<br />
Verhalten Tx<br />
Zugriff<br />
R/W<br />
R/W<br />
Default<br />
0<br />
0<br />
Einstellwert<br />
0: Keine<br />
1: DP-V2 (SR)<br />
4: DP-V2 (FR)<br />
2: AUMA Redundanz I<br />
3: AUMA Redundanz II<br />
0: Tx aktiver Kanal<br />
1: Tx beide Kanäle<br />
Erläuterung<br />
Redundanz<br />
Verhalten Tx<br />
Tabelle 62:<br />
LWL-Anschluss<br />
Nr.<br />
Typ<br />
Datenlänge = 6 Bytes<br />
68-1<br />
68-2<br />
68-3<br />
enum<br />
enum<br />
enum<br />
Parameter<br />
LWL Überwachung<br />
LWL Topologie<br />
LWL Baudrate<br />
Zugriff<br />
R/W<br />
R<br />
R<br />
Default<br />
0<br />
1<br />
0<br />
Einstellwert<br />
0: Ein (kein Endgerät)<br />
1: Aus (Endgerät)<br />
0: Ring<br />
1: Stern/Linie<br />
0: Auto<br />
1: 9,6 kbit/s<br />
2: 19,2 kbit/s<br />
3: 38,4 kbit/s<br />
4: 45,45 kbit/s<br />
5: 57,6 kbit/s<br />
6: 93,75 kbit/s<br />
7: 115,2 kbit/s<br />
8: 187,5 kbit/s<br />
9: 500 kbit/s<br />
10: 1500 kbit/s<br />
11: 3000 kbit/s<br />
12: 6000 kbit/s<br />
13: 12000 kbit/s<br />
Erläuterung<br />
LWL Überwachung<br />
LWL Topologie<br />
LWL Baudrate<br />
Tabelle 63:<br />
Antrieb<br />
Nr.<br />
Typ<br />
Parameter<br />
Datenlänge = 12 Bytes<br />
36-1<br />
36-2<br />
36-3<br />
enum<br />
enum<br />
enum<br />
Betriebsart Motorschutz<br />
Drehsinn Schließen<br />
Handradschalter<br />
Zugriff<br />
R/W<br />
R<br />
R<br />
Default<br />
0<br />
0<br />
0<br />
Einstellwert<br />
0: Auto<br />
1: Reset<br />
0: Rechtsdrehend<br />
1: Linksdrehend<br />
0: Ohne<br />
1: Öffner<br />
2: Schließer<br />
Erläuterung<br />
Meldeverhalten des Motorschutz<br />
(Thermoüberwachung) Auto:<br />
Automatisches Zurücksetzen<br />
eines Thermofehlers nach Abkühlung<br />
Reset: Erfordert ein<br />
manuelles Zurücksetzen eines<br />
Thermofehlers nach Abkühlung<br />
über einen RESET Befehl<br />
Einstellung des Drehsinns<br />
Handradschalter<br />
70


