Deutsch - Auma.com
Deutsch - Auma.com
Deutsch - Auma.com

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Stellantriebs-Steuerung<br />
AUMATIC AC 01.2/ACExC 01.2 Profibus DP<br />
Beschreibung der Datenschnittstelle<br />
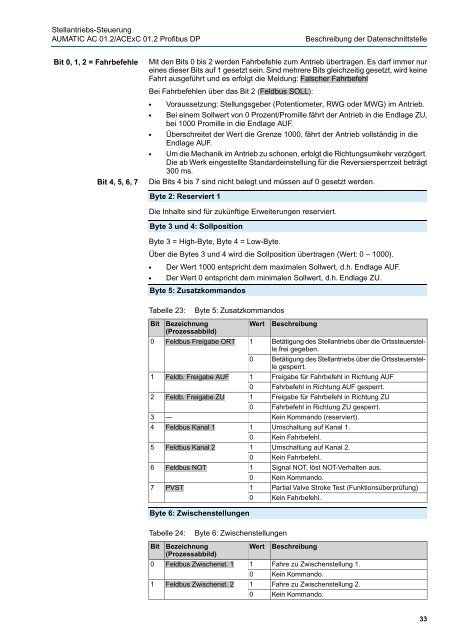
Bit 0, 1, 2 = Fahrbefehle<br />
Mit den Bits 0 bis 2 werden Fahrbefehle zum Antrieb übertragen. Es darf immer nur<br />
eines dieser Bits auf 1 gesetzt sein. Sind mehrere Bits gleichzeitig gesetzt, wird keine<br />
Fahrt ausgeführt und es erfolgt die Meldung: Falscher Fahrbefehl<br />
Bei Fahrbefehlen über das Bit 2 (Feldbus SOLL):<br />
Bit 4, 5, 6, 7<br />
● Voraussetzung: Stellungsgeber (Potentiometer, RWG oder MWG) im Antrieb.<br />
● Bei einem Sollwert von 0 Prozent/Promille fährt der Antrieb in die Endlage ZU,<br />
bei 1000 Promille in die Endlage AUF.<br />
● Überschreitet der Wert die Grenze 1000, fährt der Antrieb vollständig in die<br />
Endlage AUF.<br />
● Um die Mechanik im Antrieb zu schonen, erfolgt die Richtungsumkehr verzögert.<br />
Die ab Werk eingestellte Standardeinstellung für die Reversiersperrzeit beträgt<br />
300 ms.<br />
Die Bits 4 bis 7 sind nicht belegt und müssen auf 0 gesetzt werden.<br />
Byte 2: Reserviert 1<br />
Die Inhalte sind für zukünftige Erweiterungen reserviert.<br />
Byte 3 und 4: Sollposition<br />
Byte 3 = High-Byte, Byte 4 = Low-Byte.<br />
Über die Bytes 3 und 4 wird die Sollposition übertragen (Wert: 0 – 1000).<br />
●<br />
●<br />
Der Wert 1000 entspricht dem maximalen Sollwert, d.h. Endlage AUF.<br />
Der Wert 0 entspricht dem minimalen Sollwert, d.h. Endlage ZU.<br />
Byte 5: Zusatzkommandos<br />
Tabelle 23:<br />
Byte 5: Zusatzkommandos<br />
Bit<br />
Bezeichnung<br />
(Prozessabbild)<br />
Wert<br />
Beschreibung<br />
0<br />
Feldbus Freigabe ORT<br />
1<br />
Betätigung des Stellantriebs über die Ortssteuerstelle<br />
frei gegeben.<br />
0<br />
Betätigung des Stellantriebs über die Ortssteuerstelle<br />
gesperrt.<br />
1<br />
Feldb. Freigabe AUF<br />
1<br />
Freigabe für Fahrbefehl in Richtung AUF<br />
0<br />
Fahrbefehl in Richtung AUF gesperrt.<br />
2<br />
Feldb. Freigabe ZU<br />
1<br />
Freigabe für Fahrbefehl in Richtung ZU<br />
0<br />
Fahrbefehl in Richtung ZU gesperrt.<br />
3<br />
—<br />
Kein Kommando (reserviert).<br />
4<br />
Feldbus Kanal 1<br />
1<br />
Umschaltung auf Kanal 1.<br />
0<br />
Kein Fahrbefehl.<br />
5<br />
Feldbus Kanal 2<br />
1<br />
Umschaltung auf Kanal 2.<br />
0<br />
Kein Fahrbefehl.<br />
6<br />
Feldbus NOT<br />
1<br />
Signal NOT, löst NOT-Verhalten aus.<br />
0<br />
Kein Kommando.<br />
7<br />
PVST<br />
1<br />
Partial Valve Stroke Test (Funktionsüberprüfung)<br />
0<br />
Kein Fahrbefehl.<br />
Byte 6: Zwischenstellungen<br />
Tabelle 24:<br />
Byte 6: Zwischenstellungen<br />
Bit<br />
Bezeichnung<br />
(Prozessabbild)<br />
Wert<br />
Beschreibung<br />
0<br />
Feldbus Zwischenst. 1<br />
1<br />
Fahre zu Zwischenstellung 1.<br />
0<br />
Kein Kommando.<br />
1<br />
Feldbus Zwischenst. 2<br />
1<br />
Fahre zu Zwischenstellung 2.<br />
0<br />
Kein Kommando.<br />
33