Geregelter Vier-Quadranten-Antrieb mit Gleichstrommaschine
Geregelter Vier-Quadranten-Antrieb mit Gleichstrommaschine
Geregelter Vier-Quadranten-Antrieb mit Gleichstrommaschine

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
ENERGIETECHNISCHES PRAKTIKUM II<br />
Versuch 4:<br />
<strong>Geregelter</strong> <strong>Vier</strong>-<strong>Quadranten</strong>-<strong>Antrieb</strong> <strong>mit</strong> <strong>Gleichstrommaschine</strong><br />
1 EINLEITUNG.......................................................................................................2<br />
1.1 Last- und <strong>Antrieb</strong>skennlinien.......................................................................................... 3<br />
1.1.1 Lastkennlinien ....................................................................................................... 3<br />
1.1.2 Fremderregte <strong>Gleichstrommaschine</strong>...................................................................... 4<br />
1.1.3 Reihenschlussmaschine ......................................................................................... 5<br />
1.2 Regelung einer fremderregten <strong>Gleichstrommaschine</strong>..................................................... 6<br />
2 NETZGEFÜHRTER STROMRICHTER MIT SECHSPULS-BRÜCKENSCHALTUNG..8<br />
3 SPEISUNG EINER FREMDERREGTEN GLEICHSTROMMASCHINE ÜBER<br />
NETZGEFÜHRTEN STROMRICHTER.................................................................11<br />
4 REGELUNG EINES ELEKTRISCHEN ANTRIEBS MIT UMKEHRSTROMRICHTER13<br />
5 SCHUTZMAßNAHMEN ......................................................................................17<br />
6 VERSUCHSAUFBAU ..........................................................................................18<br />
7 VERSUCHSPROGRAMM....................................................................................20<br />
8 VERSUCHSPROTOKOLL ...................................................................................21
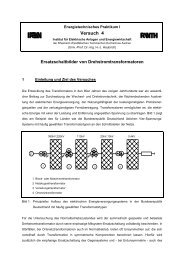
1 Einleitung<br />
In Industrie und Verkehr werden eine Reihe mechanischer Bewegungen <strong>mit</strong> unterschiedlicher<br />
Kraft und Geschwindigkeit benötigt. Die meisten dieser Bewegungen sind translatorisch oder<br />
rotatorisch. Sie werden heute zunehmend <strong>mit</strong> Hilfe von Elektromotoren rotatorisch vorgegeben<br />
und, falls erforderlich, in translatorische umgesetzt. Der Elektromotor ist ein<br />
elektromechanischer Wandler, der elektrische Energie in mechanische umsetzt. Zusammen<br />
<strong>mit</strong> einem Stellglied, das die elektrischen Größen des Netzes in die für den Motor erforderliche<br />
Form bringt, bildet er den <strong>Antrieb</strong> (Abbildung 1), der so auszulegen ist, dass die vom<br />
Anwender geforderten Bewegungen zustande kommen.<br />
Energiequelle<br />
Umrichter<br />
Maschine<br />
mech. Last<br />
(Energiesenke)<br />
Messsignale/<br />
Sensorsignale<br />
Schaltsignale/<br />
Steuersignale<br />
Steuerung/<br />
Regelung<br />
Sensorsignale<br />
<strong>Antrieb</strong><br />
Abbildung 1: Komponenten eines elektrischen <strong>Antrieb</strong>ssystems (Energiefluss im Motorbetrieb)<br />
Bei einem <strong>Antrieb</strong> <strong>mit</strong> fremderregter <strong>Gleichstrommaschine</strong>, wie er hier betrachtet wird, muss<br />
die Spannung am Anker abhängig von der Drehzahl und dem Moment verändert werden. Früher<br />
löste man diese Aufgabe <strong>mit</strong> einem Maschinenumformer, dem "Leonard-Satz", heute<br />
werden netzgeführte Stromrichter eingesetzt. Der Motor wird dabei aus einem vorhandenen<br />
Drehstromnetz über den Stromrichter <strong>mit</strong> Gleichspannung gespeist. Der Stromrichter dient als<br />
Stellglied für die Ankerspannung.<br />
Stromrichter zeichnen sich gegenüber den mechanischen Umformern durch eine Reihe guter<br />
Eigenschaften aus:<br />
• keine bewegten Teile (bis auf den Lüfter bei großen Leistungen),<br />
• geringe Verluste,<br />
• geringe Geräusche,<br />
• keine nennenswerte Wartung,<br />
• geringer Raumbedarf und kein besonderes Fundament.<br />
Die verwendete Stromrichterschaltung richtet sich nach den Forderungen, denen der <strong>Antrieb</strong><br />
genügen muss. Wird z.B. nur ein positives Moment bei unterschiedlichen Drehrichtungen gefordert,<br />
so reicht ein netzgeführter Einfachstromrichter <strong>mit</strong> steuerbaren Ventilen aus (z.B. B6-<br />
Schaltung). Werden von der <strong>Gleichstrommaschine</strong> zusätzlich auch negative Drehmomente<br />
verlangt, so ist ein Doppelstromrichter (auch Umkehrstromrichter genannt) erforderlich. Von<br />
den vielen Ausführungsmöglichkeiten eines Umkehrstromrichters wird in diesem Praktikumsversuch<br />
die kreisstromfreie Antiparallelschaltung <strong>mit</strong> zwei Sechspuls-<br />
Brückenschaltungen behandelt.<br />
2
1.1 Last- und <strong>Antrieb</strong>skennlinien<br />
1.1.1 Lastkennlinien<br />
In Abbildung 2 sind einige idealisierte Grundtypen von Widerstandsmomenten dargestellt.<br />
Der Fall eines konstanten, drehzahlunabhängigen Widerstandsmomentes ist näherungsweise<br />
bei einem Aufzug gegeben (a). Ist das Moment vom Betrag her konstant, wechselt aber <strong>mit</strong><br />
der Bewegungsrichtung das Vorzeichen, so wirkt das Widerstandsmoment immer bremsend.<br />
Ein Beispiel hierfür ist die trockene Reibung (b). Flüssige Reibung kennzeichnet sich dagegen<br />
durch ein geschwindigkeitsproportionales Widerstandsmoment (c). Eine Abhängigkeit vom<br />
Quadrat der Drehzahl ergibt sich bei Pumpen, Lüftern und der Luftreibung rotierender Maschinen<br />
(d).<br />
Abbildung 2: Idealisierte Lastkennlinien<br />
M W ist das Moment, das im stationären Betrieb auftritt. Bei Beschleunigungs- und Verzögerungsvorgängen<br />
kommt noch ein Beschleunigungsmoment M B hinzu, das dem Trägheitsmoment<br />
J proportional ist: M<br />
dn<br />
B<br />
= 2π ⋅ J .<br />
dt<br />
Bei der elektrisch erregten <strong>Gleichstrommaschine</strong> existiert der Freiheitsgrad, in welcher Art<br />
und Weise Anker- und Erregerkreis elektrisch verschaltet werden. Hierdurch ergeben sich<br />
verschiedene Typen von <strong>Gleichstrommaschine</strong>n, die im Folgenden diskutiert werden sollen.<br />
3
1.1.2 Fremderregte <strong>Gleichstrommaschine</strong><br />
Werden Ankerkreis und Erregerkreis von zwei getrennten Energiequellen versorgt, so spricht<br />
man von der fremderregten <strong>Gleichstrommaschine</strong>. Sie ist die in der heutigen <strong>Antrieb</strong>stechnik<br />
weitverbreitetste <strong>Gleichstrommaschine</strong>, da bei ihr alle Freiheitsgrade der getrennten Steuerbarkeit<br />
des erregenden Feldes und des momentbildenden Ankerstromes erhalten bleiben.<br />
U i<br />
U a<br />
I a R a L a<br />
I f<br />
M<br />
L f<br />
R f<br />
U f<br />
Abbildung 3: Ersatzschaltbild der fremderregten <strong>Gleichstrommaschine</strong><br />
Für die Ankerspannung U a gilt <strong>mit</strong> dem Fluss φ und der Maschinenkonstanten k die folgende<br />
Gleichung:<br />
U<br />
= R I kφ2πn<br />
. (1)<br />
a a a<br />
+<br />
Das <strong>Antrieb</strong>smoment M a kann direkt über den Ankerstrom eingestellt werden:<br />
M<br />
= kφ ⋅ . (2)<br />
a<br />
I a<br />
Die Kennlinie der fremderregten <strong>Gleichstrommaschine</strong>, also die funktionale Abhängigkeit der<br />
Drehzahl vom Drehmoment, n = f(M), ergibt sich aus den Maschinengleichungen:<br />
n<br />
Ui<br />
U<br />
a<br />
− Ra<br />
Ia<br />
U<br />
a<br />
Ra<br />
= = −<br />
2p<br />
⋅ kφ<br />
2p ⋅ kφ<br />
2p ⋅ kφ<br />
2p ⋅ ( kφ)<br />
=<br />
2<br />
⋅ M<br />
(3)<br />
Normalerweise wird der Fluss konstant gehalten. Als Kennlinie ergibt sich da<strong>mit</strong> eine Gerade<br />
<strong>mit</strong> einer negativen Steigung (Abbildung 4), welche von R a abhängt. Je größer R a ist, desto<br />
stärker fällt die Drehzahl <strong>mit</strong> steigendem Drehmoment ab. Eine Maschine hoher Güte sollte<br />
daher einen möglichst kleinen Ankerwiderstand haben, so dass sich eine sehr steife (flache) n-<br />
M-Kennlinie ergibt. Über die Ankerspannung kann die Drehzahl verstellt werden: steigt die<br />
Ankerspannung bei konstantem Drehmoment und Ankerstrom, so steigt auch die Drehzahl an.<br />
4
n<br />
n 0,3<br />
U a<br />
n 0,2<br />
n 0,1<br />
M<br />
Abbildung 4: Kennlinienschar der fremderregten <strong>Gleichstrommaschine</strong><br />
Ist das Drehmoment M = 0, befindet sich die Maschine also im Leerlauf, so kann die Leerlaufdrehzahl<br />
n 0 berechnet werden:<br />
U<br />
a<br />
n0 = (4)<br />
2p ⋅ kφ<br />
1.1.3 Reihenschlussmaschine<br />
Wird die Erregerwicklung in Serie (Reihe) <strong>mit</strong> der Ankerwicklung verschaltet, so erhält man<br />
die Reihenschlussmaschine.<br />
I a<br />
R a L a<br />
L f R f<br />
U a U i M<br />
U f<br />
Abbildung 5: Ersatzschaltbild der Reihenschlussmaschine<br />
Zur Berechnung der Kennlinie der Reihenschlussmaschine wird angesetzt, dass der Fluss proportional<br />
zum Ankerstrom ist: φ ~ I<br />
f<br />
= Ia<br />
. Zusätzlich wird angenommen, dass keine<br />
Sättigung in der Maschine auftritt. Mit dem Proportionalitätsfaktor k’ gilt<br />
k φ = k'<br />
I und M = k'<br />
I<br />
a<br />
2<br />
a<br />
5
Daraus und aus den Maschinengleichungen lässt sich die Gleichung für die Kennlinie der<br />
Reihenschlussmaschine ableiten:<br />
U<br />
i<br />
n =<br />
2p ⋅ kφ<br />
U<br />
a<br />
− ( Ra<br />
+ Rf<br />
) ⋅ Ia<br />
=<br />
2p ⋅ k'<br />
⋅I<br />
a<br />
=<br />
2p ⋅<br />
U<br />
a<br />
k'<br />
⋅<br />
M<br />
+<br />
⋅<br />
Ra<br />
−<br />
2p<br />
Rf<br />
k'<br />
(5)<br />
Der Verlauf der Kennlinie ist sehr charakteristisch, man spricht daher auch häufig vom Reihenschlussverhalten.<br />
Liegt kein Lastmoment an, so beschleunigt die Maschine auf sehr hohe<br />
Drehzahlen. Auf der anderen Seite sinkt die Drehzahl sehr stark <strong>mit</strong> dem Drehmoment ab.<br />
Abbildung 6: Die Kennlinie der Reihenschlussmaschine<br />
1.2 Regelung einer fremderregten <strong>Gleichstrommaschine</strong><br />
Die Vorgabe einer durch ein Stellglied einzustellenden Ankerspannung geschieht oft durch<br />
eine Steuerung, so dass komplizierte Lastzyklen (Reversieren, Beschleunigungsvorgänge etc.)<br />
exakt bewältigt werden können.<br />
Im Nachstehenden wird die Struktur der Drehzahlregelung einer <strong>Gleichstrommaschine</strong>, die<br />
über einen Stromrichter aus dem Netz gespeist wird, betrachtet (Abbildung 7). In einem inneren<br />
Regelkreis wird der Ankerstrom geregelt. Über die Maschinengleichungen, in der<br />
Gesamtheit auch als Maschinenmodell bezeichnet, wird aus dem Sollwert des Ankerstromes<br />
und der aktuellen Drehzahl die einzustellende Ankerspannung berechnet. Diese Vorgehensweise<br />
wird als Vorsteuerung oder feed forward control bezeichnet. Da die Parameter des<br />
Maschinenmodells aber fehlerhaft sein können und sich <strong>mit</strong> der Temperatur verändern, muss<br />
noch eine Rückkopplung eingefügt werden, welche auch als feed back control bezeichnet<br />
wird und eine Regelung im Gegensatz zu einer Steuerung auszeichnet. Die Differenz aus Sollund<br />
Istwert des Ankerstromes wird auf einen PI-Regler gegeben, dessen Ausgang noch zu den<br />
Ergebnissen, die aus den Berechnungen des Maschinenmodells resultieren, hinzuaddiert wird.<br />
Die PI-Regelung sorgt dafür, dass der Fehler der Regelungsgröße zu Null wird. Sie käme<br />
auch ohne die Vorsteuerung aus. Diese macht die Regelung jedoch schneller, da die Stellgröße<br />
in Form der Ankerspannung U a über das Maschinenmodell berechnet wird, wodurch die<br />
Größenordnung der Stellgröße korrekt gewählt wird. Der PI-Regler muss dann nur noch den<br />
auftretenden Fehler ausregeln.<br />
6
n*<br />
n<br />
PI<br />
M*<br />
1<br />
k<br />
R+L s<br />
a<br />
a<br />
Vorsteuerung<br />
(feed forward)<br />
U i<br />
U* a<br />
Steuerungslogik<br />
I a<br />
I* a<br />
PI<br />
(feed back)<br />
Rückkopplung<br />
2pk<br />
n<br />
AC<br />
DC<br />
M<br />
n<br />
Tacho<br />
Abbildung 7: Drehzahlregelung einer fremderregten <strong>Gleichstrommaschine</strong><br />
Für den äußeren Drehzahlregelkreis wird die Drehzahl über ein Tachometer gemessen. Der<br />
Fehler der Drehzahl geht wiederum auf einen PI-Regler, dessen Ausgang in Form des Solldrehmomentes<br />
über die Erregung in den Sollstrom umgerechnet wird.<br />
7
2 Netzgeführter Stromrichter <strong>mit</strong> Sechspuls-Brückenschaltung<br />
Richtet man <strong>mit</strong> der steuerbaren Sechspuls-Brückenschaltung (B6C-Schaltung) nach<br />
Abbildung 8 die Spannungen des Drehstromsystems gleich, so erhält man die in Abbildung 9<br />
dargestellte gleichgerichtete Spannung U .<br />
U +<br />
dia<br />
U 10<br />
i 1<br />
U 20<br />
U 30<br />
U 12<br />
U 23<br />
U 31<br />
i 2<br />
i 3<br />
n 1 n 3<br />
U diα<br />
n 4<br />
n 5<br />
n 6<br />
L dc<br />
U q<br />
n 2<br />
R a<br />
U _<br />
Abbildung 8: Gesteuerte B6-Schaltung (B6C) <strong>mit</strong> Glättungsdrossel und Belastung <strong>mit</strong> Gegenspannung<br />
Als Last wurde eine <strong>Gleichstrommaschine</strong>, dargestellt durch die Quelle U q und den Innenwiderstand<br />
R a , und eine sehr große Glättungsinduktivität L dc vorausgesetzt. Die Drossel erzwingt<br />
einen Strom I d , der als glatt angenommen werden kann. Dementsprechend sind die Ventilströme<br />
und die Netzströme i 1 bis i 3 blockförmig. Der Mittelwert der gleichgerichteten<br />
Spannung U<br />
dia<br />
kann über den Steuerwinkel a verstellt werden. Bei vereinfachter Rechnung<br />
(ideale Kommutierung) ergibt sich folgender Zusammenhang:<br />
3 2<br />
U<br />
dia<br />
= U12<br />
⋅ cosα<br />
. (6)<br />
π<br />
Dabei ist U 12 der Effektivwert der verketteten Leiterspannung. Dieser Zusammenhang wird<br />
als Steuerkennlinie des Stromrichters bezeichnet.<br />
8
u<br />
Û 10<br />
U 10 U 20<br />
U 30<br />
U +<br />
0<br />
wt<br />
U -<br />
a<br />
U 23 U 31<br />
u<br />
Û 12<br />
U 12<br />
U diα<br />
0<br />
wt<br />
2 3<br />
i<br />
% π I d i 1<br />
I d<br />
0<br />
1<br />
i 1<br />
wt<br />
- π<br />
6<br />
0<br />
π π 3π<br />
2 2<br />
2π<br />
0<br />
π<br />
2<br />
π 3π<br />
2<br />
2π<br />
wt<br />
wt'<br />
Abbildung 9: Spannungs- und Stromverläufe der B6C-Schaltung für einen Steuerwinkel<br />
a = 45°<br />
Für Steuerwinkel von 0° bis 90° ist der Mittelwert der Ausgangsspannung positiv. Es wird<br />
vom Gleichrichterbetrieb gesprochen, bei dem die Energie von der Wechselstromseite zur<br />
Gleichstromseite transportiert wird.<br />
Für Steuerwinkel von 90° bis 180° ist der Mittelwert der Ausgangsspannung negativ, wie anhand<br />
von Gl. (6) zu sehen ist. Es wird vom Wechselrichterbetrieb gesprochen, bei dem die<br />
Energie von der Gleichstromseite zur Wechselstromseite transportiert wird. Dieser liegt vor,<br />
wenn die <strong>Gleichstrommaschine</strong> bremst und als Generator arbeitet.<br />
Im Gleichrichterbetrieb kann der Steuerwinkel ohne Einschränkung zwischen 0° und 90° eingestellt<br />
werden. Im Wechselrichterbetrieb ist der Steuerwinkelbereich nicht bis 180°<br />
ausnutzbar. Zum einen dauert die Stromumschaltung (Kommutierung) von einem Ventil auf<br />
das nächste wegen vorhandener Netzreaktanzen eine endliche Zeit, wobei der Kommutierungswinkel<br />
u <strong>mit</strong> dem Strom I d nichtlinear zunimmt. Außerdem ist einem Thyristor nach der<br />
9
Leitzeit eine gewisse Erholzeit (Schonzeit t c ) zu gewähren, bevor die Spannung am Thyristor<br />
wieder positiv wird.<br />
Ist a + u + wt c > 180°, so bleiben die stromführenden Ventile weiter leitend. Dieses Kommutierungsversagen<br />
nennt man Wechselrichterkippen. Der Stromrichter verbindet dann<br />
unzulässig lange die Gleichspannungsquelle <strong>mit</strong> einer einzigen Phase des Drehstromnetzes, so<br />
dass U<br />
dia<br />
verschwindet. Der Mittelwert des Stromes steigt daher vom Ausgangswert I<br />
d1<br />
stark<br />
an und strebt gegen den Wert I<br />
d2<br />
= U<br />
dc<br />
R (Abbildung 10). Der Stromrichter kippt, d.h. er<br />
a<br />
verliert seine Eigenschaft als Wechselrichter. Dieses führt bei Halbleiterstromrichtern in der<br />
Regel zur Zerstörung eines oder mehrerer Ventile, wenn diese nicht durch besonders angepasste<br />
Sicherungen oder Schnellschalter geschützt sind. Um eine ausreichende Schonzeit<br />
(auch bei minimaler Netzspannung) sicherzustellen, werden die zulässigen Steuerwinkel in<br />
der Regel auf z.B. 150° begrenzt.<br />
u U 12 U 23 U 31<br />
Û 12<br />
0<br />
U diα1<br />
U diα2<br />
wt<br />
R a Id2=Uq<br />
U q<br />
R a I d1<br />
Kippen<br />
Abbildung 10:Zum Kippen des Wechselrichters<br />
Mit Gl. (2) wird der erforderliche Strom im Gleichstromkreis I a = I d und <strong>mit</strong> Gl. (l) die notwendige<br />
Ankerspannung U<br />
a<br />
= U dia festgelegt. Im stationären Betrieb lassen sich so die<br />
gewünschte Drehzahl und das durch die Lastkennlinie gegebene Moment einstellen. Will man<br />
nun den Arbeitspunkt verstellen, so genügt es, die Spannung U dia entsprechend zu verändern.<br />
Da der Steuerwinkel sehr schnell beeinflusst werden kann, ist auch eine hohe Stromänderungsgeschwindigkeit<br />
möglich: Der Stromrichter ermöglicht so<strong>mit</strong> auch dynamische Lastwechsel.<br />
Bei einer Drehzahlregelung ist i.a. eine Ankerstromregelung unterlagert, wodurch<br />
ein gutes dynamisches Verhalten erreicht wird. Außerdem lässt sich dabei leicht der Ankerstrom<br />
begrenzen, was zum Schutz des <strong>Antrieb</strong>es erforderlich ist.<br />
Der Leitbereich jedes Thyristors beträgt bei Vernachlässigung der Kommutierung 120°. Der<br />
Netzstrom ergibt sich aus der Überlagerung der einzelnen Ströme in den Ventilen (s. i 1 in<br />
Abbildung 9). Verwendet man einen gesteuerten Stromrichter, so ist näherungsweise die Phasenverschiebung<br />
zwischen der Grundschwingung von Netzstrom und Netzspannung gleich<br />
dem Steuerwinkel a.<br />
10
3 Speisung einer fremderregten <strong>Gleichstrommaschine</strong> über netzgeführten<br />
Stromrichter<br />
Die Drehzahl der konstant erregten <strong>Antrieb</strong>smaschine wird <strong>mit</strong> der Ankerspannung in Abhängigkeit<br />
des Momentes festgelegt. Mit größer werdendem Steuerwinkel wird die Spannung und<br />
da<strong>mit</strong> die Drehzahl kleiner und schließlich bei a » 90° zu Null. Treibt man nun die Maschine<br />
entgegen ihrem motorischen Drehsinn an, so wird sie zum Generator und liefert bei gleicher<br />
Strom- und Drehmomentrichtung eine negative Spannung.<br />
Mit Hilfe einer B6-Schaltung als Stromrichter kann man, wie Abbildung 11 zeigt, nur die<br />
Hälfte des Betriebsdiagramms der fremderregten <strong>Gleichstrommaschine</strong> einstellen, da nur ein<br />
positiver Strom und da<strong>mit</strong> ein positives Moment eingestellt werden kann. Der Drehsinn der<br />
Maschine bestimmt, ob sie als Motor oder als Generator läuft.<br />
U dia<br />
U di0<br />
1,0<br />
a = 0<br />
0,5<br />
0<br />
a = 90°<br />
I d,max<br />
I dc<br />
-0,5<br />
a = 150°<br />
-1,0<br />
Abbildung 11:Betriebsbereich eines Einfachstromrichters<br />
Schaltet man zwei gesteuerte B6-Brücken so zusammen, dass im Gleichstromkreis verschiedene<br />
Stromrichtungen möglich sind, so kann die <strong>Gleichstrommaschine</strong> in beiden<br />
Drehrichtungen angetrieben und gebremst werden (<strong>Vier</strong>quadrantenantrieb, Abbildung 12).<br />
11
U dia<br />
U di0<br />
a 2 = 150°<br />
1,0<br />
a 1<br />
= 0°<br />
0,5<br />
0<br />
a 1 = 90°<br />
I d,max<br />
I dc<br />
-0,5<br />
a 2<br />
= 0°<br />
-1,0<br />
a 1<br />
= 150°<br />
Abbildung 12:Betriebsbereich des Umkehrstromrichters<br />
Eine mögliche Schaltung ist der kreisstromfreie Umkehrstromrichter, der in diesem Praktikumsversuch<br />
verwendet wird (Abbildung 13).<br />
L dc<br />
i 1<br />
i 2<br />
U dia<br />
i 3<br />
I d<br />
Abbildung 13:Schaltung eines kreisstromfreien Umkehrstromrichters<br />
Wegen des begrenzten Steuerwinkels im generatorischen Betrieb ist die verfügbare Spannung<br />
kleiner als im motorischen Betrieb. Das führt zu Schwierigkeiten, wenn der Steuerwinkel<br />
nicht auch zu kleinen Werten hin begrenzt wird.<br />
12
4 Regelung eines elektrischen <strong>Antrieb</strong>s <strong>mit</strong> Umkehrstromrichter<br />
Die Regelung eines Umkehrstromrichters muss nach den Anforderungen des elektrischen<br />
<strong>Antrieb</strong>es ausgelegt sein. Häufig wird von der <strong>Gleichstrommaschine</strong> eine genau einstellbare<br />
Drehzahl verlangt. Das Drehmoment wird dabei durch die mechanische Belastung vorgegeben<br />
und ist meistens nicht konstant. Für diese Anforderungen sind die Regler der<br />
Umkehrstromrichter normalerweise ausgelegt; auch der in diesem Versuch verwendete arbeitet<br />
nach diesem Prinzip. Die wesentlichen Regelparameter sowie Schwellen, die den Eingriff<br />
von Schutzeinrichtungen bewirken, können von dem Benutzer dem jeweiligen <strong>Antrieb</strong>sproblem<br />
durch Einlöten entsprechender Widerstände und Kondensatoren angepasst werden.<br />
Das Regelkonzept (Stromleitverfahren) ist für einen Einfachstromrichter in Abbildung 14<br />
dargestellt. In der inneren Regelschleife wird der Stromsollwert <strong>mit</strong> dem Stromistwert verglichen.<br />
Die Differenz wird in einem Regelverstärker (Stromregler) <strong>mit</strong> PI-Verhalten verstärkt<br />
und auf ein Linearisierungsglied gegeben, das die Steuerspannung für den Impulserzeuger<br />
liefert. Der Zündwinkelgenerator stellt die Verzögerung der Zündimpulse gemäß dieser Steuerspannung<br />
ein. Der, wie die Steuerkennlinie (Gleichung 6) zeigt, von Natur aus Cosinusförmige<br />
Zusammenhang zwischen dem Zündwinkel und der Spannung U dia wird durch die<br />
Linearisierung kompensiert, so dass die Ausgangsspannung des Stromrichters U dia proportional<br />
zu der Ausgangsspannung des Stromreglers ist. Der sich aufgrund der Ausgangsspannung<br />
und der Last einstellende Gleichstrom wird typischerweise auf der Wechselstromseite des<br />
Stromrichters gemessen und als Stromistwert in den inneren Regelkreis zurückgeführt.<br />
Abbildung 14:Struktur der Regelung eines <strong>Antrieb</strong>s <strong>mit</strong> Einfachstromumrichter und fremderregter<br />
<strong>Gleichstrommaschine</strong><br />
In dem übergeordneten Drehzahlregelkreis wird die Istdrehzahl <strong>mit</strong> der Solldrehzahl verglichen.<br />
Die Differenz wird <strong>mit</strong> einem Regelverstärker (Drehzahlregler) <strong>mit</strong> PI-Verhalten<br />
verstärkt und ergibt den Stromsollwert für den unterlagerten Stromregelkreis. Dieser Stromsollwert<br />
wird zum Schutz des Umkehrstromrichters begrenzt. Da der Strom im un<strong>mit</strong>telbaren<br />
13
Zusammenhang <strong>mit</strong> dem Drehmoment der <strong>Gleichstrommaschine</strong> steht, ist deren maximales<br />
Drehmoment ebenfalls begrenzt. Die Strombegrenzung kann verändert und so den jeweiligen<br />
Anforderungen angepasst werden. Der Stromrichter hat eine statistisch schwankende Totzeit,<br />
weil eine plötzliche Zündwinkelverstellung nicht un<strong>mit</strong>telbar, sondern erst beim Zünden des<br />
nächsten Ventils wirksam werden kann.<br />
Die Regelung eines Umkehrstromrichters erfordert zusätzliche Maßnahmen, wie aus<br />
Abbildung 15 zu entnehmen ist. Bei dem hier verwendeten kreisstromfreien Umkehrstromrichter<br />
darf jeweils nur ein Teilstromrichter, d.h. eine B6-Brücke, Strom führen und<br />
Zündimpulse erhalten. Die Umschaltung der Stromrichtung wird von einer Umsteuerung herbeigeführt.<br />
Wenn der Stromsollwert, der vom Drehzahlregler geliefert wird, einen Wechsel<br />
der Stromrichtung erfordert, muss abgewartet werden, bis der Strom in der alten Richtung<br />
Null geworden ist. Steuern der Zündimpulse in Wechselrichterendlage (maximales a) beschleunigt<br />
dies und verhindert ein ungewolltes Wiederansteigen des Stromes. Eine Stromnull-<br />
Erkennungsschaltung gibt bei Unterschreiten einer sehr kleinen Stromschwelle das Stromnullsignal<br />
aus. Nach Sperrung der Zündimpulse muss eine stromlose Pauseabgewartet werden<br />
(Größenordnung l ms), welche die Schonzeit der Thyristoren enthält. Danach werden die<br />
Zündimpulse für den Teilstromrichter der neuen Stromrichtung freigegeben .<br />
Da die Ausgangsspannung des einen Teilstromrichters <strong>mit</strong> a zunimmt und die des anderen<br />
<strong>mit</strong> a abnimmt, ändert sich (wenn keine besondere Maßnahme getroffen wird), beim Umschalten<br />
der Regelsinn der Stromregelstrecke. Dieses wird dadurch vermieden, dass der<br />
Stromistwert bereits als Betrag gemessen und die Polarität des Stromsollwertes beim Umschalten<br />
gewechselt wird.<br />
14
Abbildung 15:Struktur der Regelung eines <strong>Antrieb</strong>es <strong>mit</strong> kreisstromfreiem Umkehrstromrichter<br />
und fremderregter <strong>Gleichstrommaschine</strong><br />
15
Die induzierte Spannung der <strong>Gleichstrommaschine</strong> U q , die für die Stromregelung eine Störgröße<br />
darstellt, ändert sich nur langsam, so dass für die beiden gleichgerichteten Spannungen<br />
vor und nach der Umschaltung gilt:<br />
U<br />
q<br />
≈ U diα1<br />
= U diα<br />
0 cosα1<br />
≈ U diα<br />
2 = −U<br />
diα<br />
0 cosα<br />
2<br />
.<br />
Der Steuerwinkel muss demnach auch bei langsamen Stromänderungen im allgemeinen über<br />
einen großen Bereich springen:<br />
α<br />
≈ π − .<br />
2<br />
α 1<br />
Da der Stromregler seinen Ausgangswert nicht schnell genug ändern kann, wird zum Ausgang<br />
des Stromreglers ein dem Mittelwert der gleichgerichteten Spannung proportionaler Wert<br />
addiert: Störgrößenaufschaltung, hier Spannungsaufschaltung. Ein Polaritätswechsel dieses<br />
Wertes bei Umschalten liefert die erforderliche Zündwinkeländerung. Der Stromregler<br />
braucht so<strong>mit</strong> nur noch den "dynamischen Anteil" der gleichgerichteten Spannung einzustellen,<br />
das ist näherungsweise (bei Vernachlässigung der ohmschen Widerstände) die Differenz<br />
zwischen dem Mittelwert der gleichgerichteten Spannung und der in der Maschine induzierten<br />
Spannung, die an der Induktivität im Ankerkreis auftritt.<br />
16
5 Schutzmaßnahmen<br />
Im normalen Betrieb übernimmt die Steuer- und Regeleinrichtung den Schutz der Anlage. Die<br />
eingebaute Strombegrenzung verhindert Überströme, die z.B. bei Laststößen und Drehzahlsollwertsprüngen<br />
auftreten würden. Auch das speisende Netz wird überwacht. Bei Unterspannung<br />
oder starker Unsymmetrie werden die Zündimpulse gesperrt. Das vorgeschaltete Netzschütz<br />
kann nur stromlos schalten.<br />
Für den Fall, dass die Regelung versagt oder ein Kurzschluss auftritt, sind auf der Wechselstromseite<br />
des Umkehrstromrichters (s. Abbildung 16) Induktivitäten und Sicherungen<br />
vorhanden. Die Netzdrosseln begrenzen den Anstieg des Stromes in den Thyristoren, bis die<br />
Sicherungen auslösen. Bei diesen Sicherungen muss es sich um sehr schnelle Sicherungen <strong>mit</strong><br />
definiertem Grenzlastintegral handeln, die außerdem für den Langzeitbereich angepasst sein<br />
müssen.<br />
Abbildung 16:Leistungsteil des Stromrichtergerätes<br />
Um Überspannungen an den Thyristoren zu begrenzen, ist ein kleiner Hilfsgleichrichter vorhanden<br />
(Abbildung 16 unten), der in Verbindung <strong>mit</strong> den Netzdrosseln Spannungsspitzen des<br />
Netzes auf zulässige Werte reduziert und auch als TSE-Beschaltung wirkt.<br />
17
6 Versuchsaufbau<br />
Abbildung 17:Versuchsaufbau<br />
18
In Abbildung 17 ist der Versuchsaufbau dargestellt. Über einen kreisstromfreien Umkehrstromrichter,<br />
der aus zwei antiparallel geschalteten B6-Brückenschaltungen besteht, wird der<br />
Anker einer <strong>Gleichstrommaschine</strong> gespeist. Die Erregung dieser <strong>Gleichstrommaschine</strong> erfolgt<br />
ungeregelt über einen Hilfsgleichrichter. Ein Tachogenerator auf der <strong>Antrieb</strong>swelle liefert das<br />
Drehzahlsignal.<br />
Das Lastmoment wird von der Belastungsmaschine aufgebracht. Durch die pendelnde Aufhängung<br />
ihres Ständers ist es möglich, das Drehmoment <strong>mit</strong> einem Biegestab zu erfassen. Auf<br />
beiden Seiten des Biegestabes sind je zwei Dehnungsmessstreifen aufgeklebt, welche die<br />
Dehnung oder Stauchung an der Oberfläche des Stabes in Änderungen ihrer Widerstände<br />
überführen. Sie sind zu einer Wheatstoneschen Brücke verschaltet, die von einer konstanten<br />
Spannung gespeist wird und eine dem Drehmoment proportionale Spannung liefert.<br />
Der Leonard-Satz, der aus einer Asynchronmaschine und einer fremderregten <strong>Gleichstrommaschine</strong><br />
besteht, ermöglicht den Energietransport vom Drehstromnetz ins Gleichstromnetz<br />
und umgekehrt. Er erfüllt prinzipiell die gleichen Aufgaben wie ein Umkehrstromrichter. Die<br />
Steuerung erfolgt über das Feld der <strong>Gleichstrommaschine</strong>. Dessen Größe kann <strong>mit</strong> einem<br />
Stelltransformator und seine Richtung <strong>mit</strong> einem Umschalter verändert werden.<br />
19
7 Versuchsprogramm<br />
1. Erläutern Sie den Sinn folgender Bauelemente in Verbindung <strong>mit</strong> einem Umkehrstromrichter:<br />
• Netzschütz,<br />
• Sicherungen,<br />
• Netzdrosseln,<br />
• Stromregelkreis,<br />
• Überspannungsschutz,<br />
• Regel- und Steuereinheit und<br />
• Glättungsdrossel.<br />
2. Stellen Sie die Strom- und Spannungsverläufe für a = 75° und a =105° auf einem Oszilloskop<br />
dar und zeichnen Sie diese.<br />
3. Aufnahme der Kennlinie n = f(M) der <strong>Antrieb</strong>smaschine für verschiedene Solldrehzahlen.<br />
Erläutern Sie die Kennlinien.<br />
4. Messung und Diskussion der Zeiten, die der <strong>Antrieb</strong> benötigt<br />
a : zum Hochlaufen (von Stillstand bis Höchstdrehzahl)<br />
b : zum Reversieren (von positiver zu negativer Höchstdrehzahl)<br />
c : zum Bremsen (von Höchstdrehzahl auf Stillstand)<br />
d : zum Auslaufen (von Höchstdrehzahl auf Stillstand).<br />
20
8 Versuchsprotokoll<br />
Abbildung 18:Vorlage zu 7.2<br />
21
n / min -1<br />
t<br />
Abbildung 19:Vorlage zu 7.4 a)<br />
n / min -1<br />
t<br />
Abbildung 20:Vorlage zu 7.4 b)<br />
22
n / min -1<br />
t<br />
Abbildung 21:Vorlage zu 7.4 c)<br />
n / min -1<br />
t<br />
Abbildung 22:Vorlage zu 7.4 d) (I d = 0)<br />
23