Fördertechnik Klausur - Lösungen
Fördertechnik Klausur - Lösungen
Fördertechnik Klausur - Lösungen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
<strong>Fördertechnik</strong><br />
<strong>Klausur</strong> - <strong>Lösungen</strong><br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Name:<br />
Datum: 13.07.05 Bearbeitungszeit: 120 Minuten<br />
Zugelassene Hilfsmittel: 1 DIN-A4-Blatt beliebigen Inhalts Seite 1/5<br />
1a Ein innerbetriebliches Transportmittel für Güter, das sowohl manuell als auch<br />
motorisch angetrieben sein kann aber stets flurgebunden arbeitet. Es benötigt<br />
keine speziellen Fahrwege wie Schienen o.Ä. und es kann entweder manuell<br />
gesteuert sein oder autonom agieren.<br />
1b Mecanum-Räder sind ähnlich aufgebaut wie ein Planetengetriebe: ein inneres<br />
Rad berührt ballige Rollen, die in einem um des Zentrum des Rades drehbaren<br />
Rollenträger gelagert sind. Ihre Drehachse ist gegenüber der Drehachse des<br />
inneren Rades geschwenkt. Sowohl das innere Rad als auch der Rollenträger<br />
sind unabhängig voneinander angetrieben. Durch die dabei auftretende Überlagerung<br />
von Geschwindigkeiten kann der Aufstandspunkt beliebig in beide Richtungen<br />
der Ebene bewegt werden.<br />
Das oben beschriebene Prinzip bedingt zwei unabhängige Antriebe für jedes<br />
Rad, es entsteht also bei einem Drei-Rad-Fahrzeug eine 3-fache Überbestimmtheit<br />
der Kinematik, die eine aufwändige Steuerung und viele Antriebe<br />
erfordert. Darüber hinaus entsteht durch die Verlagerung des Aufstandspunktes<br />
von einer balligen Rolle auf die nächste eine ruckartige, mit vertikalen Beschleunigungen<br />
verbundene Bewegung eines Fahrzeugs, die sowohl den Komfort<br />
schmälert als auch auf Dauer zu Beschädigungen der Fahrbahn führt. Sowohl<br />
das Kostenargument vieler Antriebe als auch die Schadensgefahr stehen<br />
einer industriellen Verbreitung entgegen.<br />
1c • Integrierbarkeit in bestehende Strukturen<br />
• Transportmöglichkeit für unterschiedliche Güter<br />
• Operationelle Probleme bei Layout-Änderungen des Betriebs<br />
• Verlagerbarkeit in andere räumliche Positionen<br />
• Anpassungsfähigkeit an variable Transportleistungsbedürfnisse<br />
• Variabilität der Transportreihenfolge<br />
• Anpassungsfähigkeit and sich ändernde Automatisierungsgrade<br />
1d Inertial:<br />
Berührungslos:<br />
Beschleunigungssensor<br />
Korrelationssensor<br />
Berührend: Odometer, Tachogenerator<br />
1e Das System induktiver Leitlinien, die im Boden verlegt von FTF verfolgt werden.<br />
Die Fahrzeuge besitzen an der gelenkten Achse eine Differentialspule und<br />
steuern diese stets so, dass die Induktion in beiden Spulenhälften gleich groß<br />
ist. Dazu drehen sie den Lenkwinkel und folgen somit der Leitlinie.
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
<strong>Fördertechnik</strong><br />
<strong>Klausur</strong> - <strong>Lösungen</strong><br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Name:<br />
Datum: 13.07.05 Bearbeitungszeit: 120 Minuten<br />
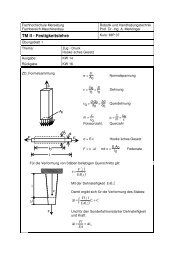
2a<br />
2b<br />
2c<br />
2d<br />
Zugelassene Hilfsmittel: 1 DIN-A4-Blatt beliebigen Inhalts Seite 2/5<br />
A<br />
a<br />
b FBr<br />
A<br />
F N<br />
Zahngesperre<br />
Backenbremse<br />
p<br />
F<br />
+ F<br />
F R<br />
F<br />
F<br />
Br<br />
ΣM A = 0 = FBrb<br />
− FN<br />
b + FRa<br />
mit F R = µ FN<br />
folgt:<br />
⎛<br />
0 = FBr b − FN<br />
N −<br />
⎝<br />
a ⎞<br />
( b − µ a)<br />
⇒ FBr<br />
= F ⎜1<br />
µ ⎟<br />
b ⎠<br />
b<br />
D.h. wenn ≤ µ , dann ist die Bremse gerade<br />
a<br />
selbsthemmend, denn F ≤ 0 .<br />
Scheibenbremse<br />
Pk 5kW1,<br />
2<br />
= = = und<br />
u F<br />
G = mit u<br />
1,<br />
2kN<br />
AG<br />
vm<br />
5m<br />
s<br />
G _ zul<br />
Br<br />
Klemmgesperre, Freilauf<br />
FF 2<br />
= qvm<br />
kg<br />
2<br />
= 10 25m<br />
2 = 250N<br />
.<br />
m s<br />
Daraus folgt: AG<br />
Fu<br />
+ FF<br />
=<br />
p<br />
1,<br />
2kN<br />
+ 0,<br />
25kN<br />
=<br />
= 85,<br />
3mm<br />
2<br />
17 N mm<br />
Kegelbremse<br />
AG<br />
Mit AG = 2sd<br />
folgt für den Bolzendurchmesser: d 14,<br />
2mm<br />
2 s<br />
= =<br />
2
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
<strong>Fördertechnik</strong><br />
<strong>Klausur</strong> - <strong>Lösungen</strong><br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Name:<br />
Datum: 13.07.05 Bearbeitungszeit: 120 Minuten<br />
2e<br />
3a<br />
Zugelassene Hilfsmittel: 1 DIN-A4-Blatt beliebigen Inhalts Seite 3/5<br />
Stahlgelenkketten besitzen in jeder Teilung ein ausgebildetes Gelenk, üblicherweise<br />
einen Bolzen, der in der Bohrung einer Kettenlasche geführt wird. Bei<br />
Antriebsketten kann dieses Gelenk zur besseren Schmierung mit Dichtungen<br />
versehen sein (O-Ring-Ketten) und erlaubt, abhängig von Belastung und<br />
Schmierung, Kettengeschwindigkeiten bis 40m/s. Bei Lastketten ist die Gelenkfläche<br />
so klein dimensioniert, dass Bruchversagen des Bolzens etwa dann eintritt,<br />
wenn auch die Laschen der Ketten überlastet werden. Die Kettenlaschen<br />
von Stahlgelenkketten können unterschiedlichste Form haben, z.B. für die Mitnahme<br />
von Gehängen, den Antrieb von Rädern, usw.. Stahlgelenkketten sind<br />
nur in einer Richtung krümmbar.<br />
Rundstahlketten bestehen aus zu Ringen gebogenen Rundstählen, die ineinander<br />
verschlungen sind. Dementsprechend besitzen sie keine ausgebildeten<br />
Gelenke sondern die Rundstähle liegen berührend aufeinander. Diese Ketten<br />
werden auf Bruch dimensioniert und können nur kleine Kettengeschwindigkeiten<br />
ertragen. Sie sind jedoch allseitig krümmbar, also raumbeweglich. Einsatzfälle<br />
sind u.a. als Anschlagmittel und für den Transport von Grobkörnigen Gütern<br />
(Schutt, Kohle, Mist, …)<br />
2<br />
D<br />
I M π sn ϕkγ<br />
4<br />
= mit : s = 0,<br />
75D<br />
gewählt<br />
S<br />
ϕ = 0,<br />
32 gewählt<br />
k = 0,<br />
89 für 5,7° Steigung<br />
γ 0,<br />
8 t<br />
S =<br />
3<br />
m<br />
2<br />
D<br />
3 0,<br />
75<br />
I M = π 0,<br />
75Dnϕkγ<br />
S = D π nϕkγ<br />
S<br />
4<br />
4<br />
3<br />
4I<br />
M<br />
4 ⋅50t<br />
⋅ min m<br />
D = 3<br />
= 3<br />
= 0,<br />
59m<br />
π 0,<br />
75nϕkγ<br />
60 minπ<br />
0,<br />
75⋅<br />
30 ⋅ 0,<br />
32 ⋅ 0,<br />
96 ⋅ 0,<br />
8t<br />
3b I g(<br />
L + H )<br />
P M ges<br />
S<br />
= µ mit : µ = 3,<br />
1 gewählt ergibt sich:<br />
3<br />
10 kg m<br />
P = 50 9,<br />
81 2<br />
3600s<br />
s<br />
8<br />
P<br />
PN<br />
= 1 , 5<br />
η<br />
= 46,<br />
7kW<br />
G<br />
ges<br />
( 50m<br />
⋅ 3,<br />
1 + 5m)<br />
= 21,<br />
kW<br />
3c Zur Vermeidung von Verklemmungen wird die Schnecke exzentrisch gelagert.<br />
Ein verklemmtes Korn wird beim weiteren Umlauf der Schnecke aufgrund des<br />
sich weitenden Spalts zwischen Schnecke und Trog freikommen und die<br />
Klemmung die Drehung der Schnecke nicht weiter behindern und so die benötigte<br />
Antriebsleistung nicht weiter erhöhen und den Verschleiß von Trog und<br />
Schnecke nicht weiter fördern.
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
<strong>Fördertechnik</strong><br />
<strong>Klausur</strong> - <strong>Lösungen</strong><br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Name:<br />
Datum: 13.07.05 Bearbeitungszeit: 120 Minuten<br />
Zugelassene Hilfsmittel: 1 DIN-A4-Blatt beliebigen Inhalts Seite 4/5<br />
4a Stetigförderer erzeugen einen ununterbrochenen Fördervorgang zwischen Ausgangs-<br />
und Zielort. Der Förderweg ist und- oder schwer veränderlich festgelegt<br />
und kann i.A. beliebig im Raum verlaufen.<br />
Bei Unstetigförderern ist der Fördervorgang zwischen Ausgangs- und Zielort<br />
unterbrochen und verläuft i.d.R. flurgebunden oder entlang der Wege von Hebezeugen.<br />
Der Förderweg ist jedoch oft frei wählbar.<br />
Beispiele für Stetigförderer:<br />
• Zugmittelförderer<br />
• Schwerkraftförderer<br />
• Strömungsförderer<br />
• Strömungsmischförderer<br />
• Schwingförderer<br />
4b Eigenschaften von Stückgütern:<br />
• Abmessungen<br />
• Gewicht<br />
• Form<br />
Beispiele für Unstetigförderer:<br />
• Hebezeuge<br />
• Flurförderer<br />
• Kipper<br />
• Regalbediengeräte<br />
• Seil- und Hängebahnen<br />
Eigenschaften von Schüttgütern:<br />
• Körnung<br />
• Schüttdichte<br />
• Böschungswinkel<br />
Als Körnung / Stückigkeit wird der Mittelwert zwischen kleinster und größter<br />
Korngröße von Schüttgütern bezeichnet (bei grobstückigen Schüttgütern wird<br />
a zur Kennzeichnung benutzt) . Man spricht von sortiertem Schüttgut, wenn<br />
max<br />
amax<br />
≤<br />
a<br />
min<br />
2,<br />
5<br />
amax<br />
, von unsortiertem Schüttgut wenn > 2,<br />
5.<br />
a<br />
Schüttgüter werden nach Körnung unterteilt in:<br />
• grobstückig ak > 160mm<br />
• mittelstückig ak > 60...<br />
160mm<br />
• kleinstückig ak > 10...<br />
60mm<br />
• körnig ak > 0,<br />
5...<br />
10mm<br />
• staubförmig <<br />
0,<br />
5mm<br />
min<br />
a k
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
<strong>Fördertechnik</strong><br />
<strong>Klausur</strong> - <strong>Lösungen</strong><br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Name:<br />
Datum: 13.07.05 Bearbeitungszeit: 120 Minuten<br />
Zugelassene Hilfsmittel: 1 DIN-A4-Blatt beliebigen Inhalts Seite 5/5<br />
4b Das Schüttgewicht unterscheidet sich von der Dichte eines Stoffes durch den<br />
Volumenfüllungsgrad ϕ , der von der Verdichtung eines Schüttgutes abhängt.<br />
Schüttgüter werden nach Schüttgewicht unterteilt in:<br />
• leicht<br />
• mittelschwer<br />
• schwer<br />
• sehr schwer<br />
γ S ≤<br />
γ S =<br />
γ S =<br />
γ S ><br />
0, 6t<br />
m<br />
3<br />
0, 6...<br />
1,<br />
1t<br />
m<br />
1, 1...<br />
2,<br />
0t<br />
m<br />
2, 0t<br />
m<br />
Der Böschungswinkel kennzeichnet das Fließverhalten eines Schüttguts und<br />
beschreibt den Winkel des Schüttkegels zur Horizontalen, wenn Schüttgut aus<br />
geringer Höhe langsam aufgeschüttet wird ( β ). Bei Bewegung der Unterlage<br />
verringert sich der Böschungswinkel auf den Böschungswinkel der Bewegung<br />
( β b ) wobei gilt: βb = 0,<br />
4...<br />
0,<br />
7β<br />
Schüttgüter werden nach Beschungswinkel unterteilt in:<br />
• wie Flüssigkeit fließend: β ≈ 0°<br />
• leicht fließend β ≤ 30°<br />
• normal fließend β = 30°<br />
... 45°<br />
• schwer fließend β = 45°<br />
... 60°<br />
• zusammenhaltend β =≥ 60°<br />
• nicht rutschen, nicht fließend, brückenbildend: β<br />
=≥ 90°<br />
3<br />
3<br />
3