∫ ∫ ∫ ∫ ∫
∫ ∫ ∫ ∫ ∫
∫ ∫ ∫ ∫ ∫

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
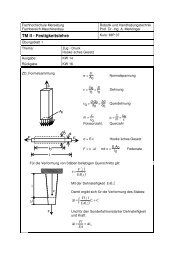
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
TM III – Kinematik / Kinetik<br />
Übungsblatt 6<br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Kurs: WiWi 04<br />
Thema: Kinetik des Körpers,<br />
Massenträgheitsmomente – Satz von Steiner<br />
Ausgabe: KW 51<br />
Rückgabe KW 2<br />
Formelsammlung<br />
Grundgesetz für Drehbewegungen M = J ⋅ϕ&<br />
&<br />
Axiale Massenträgheitsmomente:<br />
J =<br />
J<br />
x<br />
2<br />
<strong>∫</strong>r<br />
dm<br />
2 2<br />
2 2<br />
2 2<br />
<strong>∫</strong>(<br />
y + z ) dm;<br />
Jy<br />
= <strong>∫</strong>(<br />
x + z ) dm;<br />
Jz<br />
= <strong>∫</strong>(<br />
x + y )<br />
1<br />
2 2 2<br />
Polares Massenträgheitsmoment: J p ( Jx<br />
+ Jy<br />
+ Jz<br />
) = <strong>∫</strong> ( x + y + z )<br />
Zylinder<br />
2 2 ⎛ ra<br />
l ⎞<br />
Jx<br />
= Jy<br />
= m ⎜ +<br />
4 12 ⎟<br />
⎝ ⎠<br />
2<br />
ra<br />
Jz<br />
= m<br />
2<br />
Dünne Kreis-<br />
scheibe<br />
2<br />
ra<br />
Jx<br />
= Jy<br />
= m<br />
4<br />
2<br />
ra<br />
Jz<br />
= m<br />
2<br />
Quader<br />
2 2<br />
h + l<br />
Jx<br />
= m<br />
12<br />
2 2<br />
b + l<br />
Jy<br />
= m<br />
12<br />
2 2<br />
h + b<br />
Jz<br />
= m<br />
12<br />
Dünner Stab<br />
2<br />
l<br />
J x = Jy<br />
= m<br />
12<br />
J = 0<br />
z<br />
=<br />
= dm<br />
2<br />
2 2<br />
2<br />
Satz von Steiner: J + ( x + y ) m=<br />
J + r m<br />
Jz = ς S S ς S<br />
Massenträgheitsmomente einfacher Körper<br />
z<br />
r a<br />
z<br />
r a<br />
z<br />
z<br />
y<br />
b<br />
y<br />
y<br />
h<br />
l/2<br />
y<br />
l/2<br />
l<br />
l<br />
x<br />
x<br />
x<br />
x<br />
Dickwandiger Hohl-<br />
zylinder<br />
2 2 2 ⎛ra<br />
+ ri<br />
l ⎞<br />
Jx<br />
= Jy<br />
= m<br />
⎜ +<br />
4 12 ⎟<br />
⎝ ⎠<br />
2 2<br />
ra<br />
+ ri<br />
Jz<br />
= m<br />
2<br />
Dünner Kreisring<br />
2<br />
rm<br />
Jx<br />
= Jy<br />
= m<br />
2<br />
J = mr<br />
z<br />
2<br />
m<br />
Dünne Rechteckplatte<br />
2<br />
h<br />
Jx<br />
= m<br />
12<br />
2<br />
b<br />
Jy<br />
= m<br />
12<br />
2 2<br />
h + b<br />
Jz<br />
= m<br />
12<br />
Kugel<br />
2<br />
mr<br />
5<br />
2<br />
Jx = Jy<br />
= Jz<br />
=<br />
r<br />
r a<br />
z<br />
z<br />
rm<br />
z<br />
y<br />
b<br />
r i<br />
y<br />
y<br />
z<br />
y<br />
h<br />
l<br />
x<br />
x<br />
x<br />
x<br />
dm
Fachhochschule Merseburg<br />
Fachbereich Maschinenbau<br />
TM III – Kinematik / Kinetik<br />
Übungsblatt 6<br />
Robotik und Handhabungstechnik<br />
Prof. Dr.-Ing. A. Merklinger<br />
Kurs: WiWi 04<br />
Thema: Kinetik des Körpers,<br />
Massenträgheitsmomente – Satz von Steiner<br />
Ausgabe: KW 51<br />
Rückgabe KW 2<br />
Aufgabe 17:<br />
Das Schwungrad einer Werkstattpresse<br />
ist wie skizziert aus einem ringförmigen<br />
Band, zwei kugelförmigen Gewichten<br />
und zwei runden Speichen<br />
aufgebaut. Alle Einzelteile bestehen<br />
aus Stahlguß. Es wird beim Preßvorgang<br />
innerhalb des Zeitraumes Δ t von<br />
der Drehzahl n bis zum Stillstand abgebremst.<br />
rm = 0,<br />
5 m<br />
D=<br />
300mm<br />
d = 150mm<br />
a = 30mm<br />
h=<br />
200mm<br />
s = 5 mm<br />
ρ = 7,<br />
8<br />
kg<br />
3<br />
dm<br />
−1<br />
n=<br />
300min<br />
Δt<br />
= 0,<br />
5 s<br />
Welches Verzögerungsmoment wirkt dabei über die Nabe auf das<br />
Schwungrad, wenn eine konstante Bremsverzögerung angenommen<br />
wird ?<br />
Aufgabe 18: Eine Seiltrommel ist in massiver Bauweise aus Stahl gefertigt, reibungsfrei<br />
gelagert und zunächst blockiert. An einem masselosen Seil<br />
hängt die Masse m. Bei t = 0 wird die Blockierung aufgehoben und<br />
das System setzt sich in Bewegung.<br />
D=<br />
300mm<br />
d = 200mm<br />
l<br />
l = 400mm<br />
b<br />
ϕ<br />
b = 200mm<br />
D<br />
d<br />
m=<br />
80 kg<br />
ρ = 7,<br />
8<br />
kg<br />
3<br />
dm<br />
a: Bestimmen Sie das Massenträgheitsmoment der Seiltrommel.<br />
b: Stellen Sie die Bewegungsgleichung des Systems in s auf und geben<br />
Sie ihre Lösung an.<br />
c: Welche Drehzahl hat die Seiltrommel nach t = 10s<br />
?<br />
D<br />
h<br />
y<br />
z<br />
d<br />
D<br />
rm<br />
s<br />
a<br />
m<br />
x<br />
x<br />
s