Testbericht aus FMT - Modellbau Lindinger Onlineshop
Testbericht aus FMT - Modellbau Lindinger Onlineshop
Testbericht aus FMT - Modellbau Lindinger Onlineshop

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
46 JETS <strong>FMT</strong> 03 | 11 hELMuT LEBEN<br />
Maverick ist<br />
Spätestens seit „Top Gun“ kennt jeder die von Grumman gebaute F-14 Tomcat.<br />
Das <strong>aus</strong> Styropor geschäumte Modell von <strong>Modellbau</strong> <strong>Lindinger</strong> ist einer<br />
Maschine der Staffel VF-84, den „Jolly Rogers“, nachempfunden. Die Maschinen<br />
dieser Einheit der amerikanischen Navy wurden in den 70er Jahren vom<br />
Flugzeugträger USS Nimitz geflogen und waren mit dem charakteristischen<br />
weißen Totenkopf auf dem schwarzen Seitenleitwerk lackiert. Das Original<br />
repräsentierte mit zwei Triebwerken, Nachbrennern, Schwenkflügeln und<br />
moderner Elektronik den Stand der damaligen Technik.<br />
kompletter b<strong>aus</strong>atz<br />
Die F-14 von <strong>Modellbau</strong> <strong>Lindinger</strong> tritt, was<br />
die technische Ausstattung angeht, in die<br />
Fußstapfen des Originals. Sie ist mit zwei<br />
Elektroimpellern <strong>aus</strong>gestattet, verfügt über<br />
eine Schwenkflügelmechanik und hat ein<br />
pneumatisches Einziehfahrwerk. Die Maschine<br />
kommt in der ARF-Version fast fertig <strong>aus</strong> ihrer<br />
Schachtel. In der Voll<strong>aus</strong>stattungsversion sind<br />
Impeller, Einziehfahrwerke, Servos und Regler<br />
bereits eingebaut und verkabelt. Es sieht auf<br />
den ersten Blick so <strong>aus</strong>, als ob nur wenige<br />
Teile montiert bzw. verklebt werden müssen.<br />
Die 28-seitige Bauanleitung bezieht sich<br />
auf eine B<strong>aus</strong>atzversion, sodass viele Seiten<br />
nur zur Information dienen, wie die Maschine<br />
zusammengebaut wurde. Die Anleitung enthält<br />
nur sehr wenig Text in englischer Sprache,<br />
dafür aber viele Bilder, <strong>aus</strong> denen mehr oder<br />
weniger hervorgeht, was zu tun ist. Leider<br />
fehlen meiner Meinung nach einige lebenswichtige<br />
Informationen. Ich werde an den<br />
entsprechenden Stellen darauf eingehen. Beim<br />
Auspacken der Maschine darf die Unterseite<br />
der Styroporverpackung nicht übersehen<br />
werden. Unter einem unscheinbaren Deckel<br />
versteckt sich eine Vielzahl an Kleinteilen. Dort<br />
finden sich Sidewinder- und Maverick-Raketen,<br />
Zusatztanks und die notwendigen Halterungen<br />
dazu sowie Fahrwerksschachtabdeckungen<br />
zur Verwendung des starren Fahrwerks.<br />
Leider steht in der Anleitung nichts darüber,<br />
wie und wo diese Zusatz<strong>aus</strong>stattung angebracht<br />
werden soll. Mithilfe von Fotos lässt<br />
sich das 3D-Puzzle jedoch lösen. Ich habe<br />
diesen Zierrat für die ersten Flüge weggelassen,<br />
zumal die Schwerpunktlage mit der<br />
kompletten Bewaffnung angepasst werden<br />
muss. Komplett <strong>aus</strong>gerüstst, schaut die F-14<br />
aber richtig gut <strong>aus</strong>.<br />
Was mir in der Anleitung ebenfalls fehlt,<br />
sind Informationen über die verbauten Regler<br />
und Motoren. Hier muss einfach alles funktionieren.<br />
Eine spannende Sache!<br />
der zusammenbau<br />
Die Bauanleitung zeigt im Prinzip alle noch<br />
notwendigen Arbeiten. Besonders beachten<br />
muss man den B<strong>aus</strong>chritt 5: Die Holmbrücke<br />
muss mit Epoxydharz in den Rumpf eingeklebt<br />
werden. Ich war bei meinem schon<br />
weit vorgefertigten ARF-Modell davon <strong>aus</strong>gegangen,<br />
dass das bereits erledigt ist. Hier<br />
bietet es sich an, die Kontaktflächen am<br />
Kunststoffteil etwas anzuschleifen, um eine<br />
gute Verklebung zu erreichen.<br />
Für den Servohebel des Schwenkflügelmechanismus<br />
muss man noch etwas Styropor<br />
entfernen, damit er nicht anstreift. Außerdem<br />
muss er um ein Loch gekürzt werden. Der richtige<br />
Einhängepunkt ist die vorletzte Bohrung im<br />
Die Höhenruderbefestigung erhält<br />
angeschliffene Flächen.
Ich habe die Höhenruderanlenkung mit Kugelkopf und<br />
Gabelkopf <strong>aus</strong>geführt, weil die beiliegenden Teile keine spielfreie<br />
Anlenkung ermöglichen.<br />
www.fmt-rc.de <strong>FMT</strong>-TEST 47<br />
F-14 Tomcat von <strong>Modellbau</strong> <strong>Lindinger</strong><br />
wieder da!<br />
(ungekürzten) Doppelhebel. Die Kugelbolzen<br />
der Schwenkvorrichtung an den Flügelwurzeln<br />
müssen wirklich fest sitzen. Bei meinem Modell<br />
war eine Seite etwas locker und musste nachgezogen<br />
werden. An dieser Verschraubung<br />
sowie an den Schwenkbolzen ist unbedingt<br />
Schraubensicherungslack zu verwenden, damit<br />
keine wichtigen Teile (Tragflächen) verloren<br />
gehen. Mir erscheinen die verwendeten Kugelclips<br />
auch sehr zierlich für diese Aufgabe,<br />
doch probieren wir es erst einmal <strong>aus</strong>.<br />
Im B<strong>aus</strong>chritt 11 werden die Höhenleitwerke<br />
angebaut. Hier vermisse ich den Hinweis,<br />
die Stahlwinkel vor dem Verkleben anzuschleifen.<br />
Bei den Anlenkungen, die <strong>aus</strong> einem<br />
Stellring und einer M3-Schraube bestehen,<br />
ist es wichtig, kleine Klemmflächen für die<br />
Schrauben in den Draht zu feilen, damit diese<br />
Klemmung gut hält. Die Schrauben sollen natürlich<br />
senkrecht zur Profilmitte <strong>aus</strong>gerichtet<br />
werden. Um ein Schleifen der Leitwerke am<br />
Rumpf zu verhindern, habe ich je eine Unterlegscheibe<br />
zwischen Rumpf und Leitwerk gelegt.<br />
Passt alles spielfrei und leichtgängig, wird<br />
die Klemmschraube mit Loctite eingesetzt und<br />
gut festgezogen. An diesen beiden Schrauben<br />
hängt die gesamte Steuerung der Maschine,<br />
hier muss man gewissenhaft vorgehen.<br />
Die Anlenkungen der Höhenleitwerke habe<br />
ich ebenfalls geändert, da ich es nicht geschafft<br />
habe, die beiliegenden Klemmungen<br />
leichtgängig und spielfrei anzuschrauben.<br />
Die mitgelieferten gekröpften Gestänge hätten<br />
auf den dünnen Servohebeln ebenfalls<br />
zu viel Spiel gehabt. Ich habe die Sache mit<br />
zwei angeschraubten Kugelköpfen und zwei<br />
Gabelköpfen geregelt, die ich mit einem CFK-<br />
Stab verklebte. So ist die Anlenkung wirklich<br />
spielfrei und immer noch leicht.<br />
das Fahrwerk<br />
Die Mechaniken sind bereits fertig eingebaut<br />
und mit Druckluftleitungen versehen. Die<br />
Fahrwerksbeine müssen noch montiert und<br />
die Lenkseile angebracht werden. Auch hier<br />
feilt man kleine Klemmflächen an die Fahrwerksbeine<br />
und sichert die Klemmschrauben<br />
mit Loctite.<br />
Die Federmechaniken an den Hauptfahrwerken habe ich<br />
nicht verwendet, da die Feder beim ersten Einfedern davon sprang.<br />
Die Fahrwerksschächte erfordern etwas Anpassung.
48 JETS <strong>FMT</strong> 03 | 11<br />
Die Flächenbrücke muss gut eingeklebt<br />
und der Raum für den Servohebel noch etwas<br />
<strong>aus</strong>gearbeitet werden.<br />
Das Fahrwerk ist ein Einkreissystem, das bei<br />
Druckverlust mit Federspannung <strong>aus</strong>fährt. Das<br />
Steuerventil mit dem dazugehörenden Servo<br />
ist unter dem Cockpit platziert. Wenn das Ventil<br />
wie vorgesehen auf dem Sockel bleibt, ist<br />
ein Akkuwechsel nur möglich, solange kein<br />
Empfänger eingebaut ist. Ich habe das Ventil<br />
daher nach vorne verlegt.<br />
Die Fahrwerksmechaniken sind <strong>aus</strong> Aluminium<br />
gefertigt und machen einen präzisen<br />
Eindruck. Die Fahrwerksbeine bestehen<br />
<strong>aus</strong> 3-mm-Stahldraht mit angeschraubten<br />
und geklebten Federelementen und<br />
Radhaltern. Leider springen die Federn darin<br />
schon beim ersten Test auf dem Bautisch davon,<br />
weil sie nicht gesichert sind. Hier fehlen<br />
kleine Feder-Klemmscheiben zur Sicherung.<br />
Um es vorwegzunehmen, die Radhalter tragen<br />
die Maschine nicht. Daher habe ich einfache<br />
Drahtbeine mit einer Federwindung<br />
eingesetzt.<br />
Die Radschächte passen nicht so ganz zu<br />
den eingefahrenen Hauptfahrwerksbeinen.<br />
Hier muss etwas nachgeschliffen werden, was<br />
bei dem Werkstoff jedoch schnell erledigt ist.<br />
Die Befestigungsschrauben am Bugfahrwerk<br />
habe ich gekürzt und mit Sicherungslack wieder<br />
eingesetzt.<br />
Die Flügelabdeckung wird mit Stiften vorne am<br />
Rumpf gesichert, sonst fliegt sie weg.<br />
Der Schwenkflügel wird von einem Digitalservo<br />
bewegt. Der Mechanismus ist erstaunlich<br />
einfach und funktioniert tadellos.<br />
Die nächste Überraschung kam beim ersten<br />
Funktionstest: Das linke Fahrwerksbein<br />
bewegte sich nur unwillig, da es zu eng in<br />
seine Halterung gepresst war. Hier war ebenfalls<br />
Nacharbeit nötig. Also alles wieder <strong>aus</strong>bauen<br />
und nachfeilen. Das Befüllventil war<br />
ebenfalls undicht und so habe ich es durch<br />
eines von Robart ersetzt. Nun funktioniert<br />
auch das Fahrwerk.<br />
Die verwendeten Druckschläuche bestehen<br />
<strong>aus</strong> sehr hartem Material und sind nur wenig<br />
flexibel. Bei mir kam es nach einigen Berührungen<br />
zu Lecks an den Stecknippeln. Ich habe<br />
nach und nach alle Schläuche <strong>aus</strong>get<strong>aus</strong>cht.<br />
Programmierung und kosmetik<br />
Die Steuerung der Tomcat wird von den beiden<br />
Tailerons übernommen. Dazu muss ein Deltamischer<br />
programmiert werden. Die Angaben<br />
über die Ruder<strong>aus</strong>schläge in der Bauanleitung<br />
erwecken kein besonderes Vertrauen. Drei<br />
Fotos zeigen die Neutralstellung und die<br />
maximalen Ausschläge der Leitwerke. Mischungsverhältnisse<br />
müssen selbst ermittelt<br />
werden, das wird wieder spannend.<br />
Ich habe die Ausschläge zunächst zur Hälfte<br />
für Höhen- und Querruderfunktion aufgeteilt<br />
und mit Dual-Rate eine schaltbare Ausschlags-<br />
Antrieb und Servos sind in der Voll<strong>aus</strong>stattungsversion<br />
eingebaut. Der erneute Aufbau <strong>aus</strong> einem<br />
Teilesatz offenbart dann auch die Antriebe.<br />
Der Drehbolzen wird mit einer M2-Schraube<br />
gesichert. Diese muss unbedingt mit<br />
Loctite oder Sekundenkleber verklebt werden.<br />
reduzierung vorgesehen. Der Schwenkflügel<br />
wird über einen Dreistufenschalter betätigt<br />
und mit einer Slow-Funktion auf drei Sekunden<br />
eingestellt. So kann ich erst einmal auf Mittelposition<br />
schwenken und die Flugeigenschaften<br />
beobachten, bevor eventuell alles zu spät<br />
ist. Später soll der Schwenkflügel mit einem<br />
Knüppeltaster betätigt werden.<br />
Die gesamte RC-Anlage wird über den mitgelieferten<br />
BEC-B<strong>aus</strong>tein mit Strom versorgt.<br />
Er ist bereits mit den Akkukabeln verlötet<br />
und muss nur in den Empfänger eingesteckt<br />
werden. Als Empfänger dient ein MZK-6-Kanal,<br />
der gut in den Bauraum unter dem Cockpit<br />
passt, nachdem ich den Kabelsalat mit etwas<br />
Spiralschlauch gebändigt habe.<br />
Die beiden Impeller werden über zwei<br />
Regler angesteuert, die empfängerseitig an<br />
einen Stecker zusammengefasst sind. Die<br />
Energie kommt <strong>aus</strong> einem 3S-LiPo-Akku mit<br />
3.300 mAh von Wellpower. Zum Glück passen<br />
meine vorhandenen 3.800er TopFuel-Akkus<br />
auch herein. Ein Styroporklotz hält den Akku<br />
in seiner Position hinter dem Cockpit. Der<br />
Gewichtsunterschied beträgt 60 g. Die ersten<br />
Testläufe in der Werkstatt zeigen gutes<br />
Beschleunigungsvermögen. So weit, so gut!<br />
Die hässlichen Kanäle auf der Unterseite<br />
von Flächen und Leitwerken stören den optischen<br />
Eindruck sehr. Ich habe wenigstens die<br />
Höhenleitwerke mit Moltofill-Leichtspachtel<br />
verspachtelt und verschliffen. Dieser Spachtel<br />
auf Wasserbasis lässt sich sehr leicht schleifen.<br />
Weiterhin habe ich die Fahrwerksbefestigungsbrettchen<br />
mit den beiliegenden Styroporteilen<br />
verkleidet. Das Loch unten im<br />
Rumpf, wo das Schwenkflügelservo montiert<br />
ist, wurde ebenfalls mit Depron verschlossen.<br />
Die Bewaffnung und die Zusatztanks klebte ich<br />
nach Fotos zusammen. Die schwarzen Streifen<br />
bei den mitgelieferten überzähligen Abziehbildern<br />
gehören auf die Maverick-Raketen.<br />
Die Spitzen der Sidewinder-Raketen wurden<br />
mit einem Edding eingefärbt. Die Zusatztanks<br />
sind mit Airbrushfarbe grau gespritzt.
Erstflug mit Überraschungen<br />
Ich muss zugeben, dass der Erstflug dieser<br />
Tomcat eine gewisse Spannung in mir geweckt<br />
hat. Das hatte ich schon lange nicht<br />
mehr, doch hier gibt es ja wirklich viele offene<br />
Fragen: Passen die Ausschläge der Tailerons?<br />
Wie ist der Hinweis in der Anleitung zu verstehen,<br />
man solle die Ausschläge reduzieren,<br />
wenn man mit großen Ausschlägen ungeübt<br />
ist? Was passiert, wenn der Flügel geschwenkt<br />
wird? Schnell noch den Drucklufttank für das<br />
Fahrwerk befüllen (Luftpumpe nicht vergessen)<br />
und es kann losgehen.<br />
Mit diesen Gedanken schiebe ich den Gasknüppel<br />
nach vorne: Die Tomcat beschleunigt<br />
zügig und hält sauber die Richtung. Nach etwa<br />
15 m ziehe ich leicht und der Jet rotiert brav<br />
und hebt sanft ab. Im Steigflug muss ich stark<br />
nach rechts trimmen. Dann fahre ich das Fahrwerk<br />
ein. Noch im Steigflug löst sich die Flügelabdeckung<br />
oben am Rumpf. Hier war der Haltemagnet<br />
wohl überfordert. Zum Glück fliegt<br />
die Maschine auch ohne diese Abdeckung<br />
ruhig weiter. Das Steuerverhalten ist angenehm<br />
sanft, aber direkt. Die Sorgen über Ausschläge<br />
an den Rudern waren also übertrieben.<br />
Nach einigen Überflügen schwenke ich den<br />
Flügel auf mittlere Position. Dabei beschleunigt<br />
die F-14 etwas, sonst ändert sich nichts. Es<br />
gibt kaum Lastigkeitsänderungen. Wieder bin<br />
ich positiv überrascht, so einfach hatte ich mir<br />
das nicht vorgestellt. Das Flugbild ist klasse,<br />
die Maschine sieht toll <strong>aus</strong>. Die Steigleistung<br />
ist mit 30° Steigwinkel nicht überragend, aber<br />
<strong>aus</strong>reichend.<br />
Leider wurde mein Genuss nach nur drei<br />
Minuten abrupt beendet, da der 35-MHz-<br />
Empfänger nach kurzer Vorwarnung seine<br />
Mitarbeit beendete. Kurz darauf tat dies die<br />
Tomcat auch.<br />
zweiter Versuch<br />
Zum Glück konnte ich die nahezu unbeschädigte<br />
Technik in eine neue B<strong>aus</strong>atzmaschine<br />
einsetzen, die nach einigen Abenden schon<br />
wieder dasteht wie ihr Vorgänger. Nun kann ich<br />
auch Bilder der Innen<strong>aus</strong>stattung machen, die<br />
bei Version 1 unsichtbar geblieben ist. Die Technik<br />
wird im Prinzip in die untere Rumpfschale<br />
eingeklebt, bevor die obere Hälfte aufgeklebt<br />
wird. Ich habe die Impeller und die Regler<br />
sowie die vielen Kabel mit Heißkleber fixiert.<br />
Tragende Teile werden mit 5-Minuten-Epoxy<br />
verklebt. Die Rumpfteile <strong>aus</strong> Styropor habe ich<br />
mit Weißleim verbunden, um mehr Zeit zum<br />
Ausrichten zu haben. Nicht vergessen sollte<br />
man das Gegenlager des oberen Rumpfdeckels.<br />
Es muss vor dem Verkleben der Rumpfteile in<br />
die obere Rumpfschale eingesetzt werden.<br />
Mit den Erkenntnissen <strong>aus</strong> der Nr. 1 habe ich<br />
die Flächenabdeckung vorne mit drei CFK-Stiften<br />
versehen, die in Bowdenzugröhrchen ein-<br />
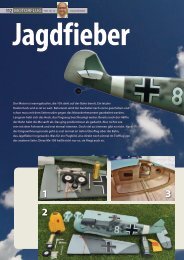
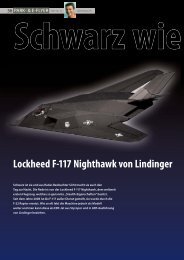
Das Material für<br />
Bewaffnung und<br />
Zusatztanks liegt bei.<br />
Leider gibt es<br />
keine Angaben zur<br />
Montage in der<br />
Bauanleitung. Die<br />
Optik wird jedoch<br />
enorm verbessert.<br />
Auf der Unterseite<br />
ist im Lieferzustand<br />
noch viel Technik<br />
sichtbar. Ich habe wenigstens<br />
die Stähle<br />
in den Leitwerken<br />
verspachtelt und<br />
das Servoloch des<br />
Schwenkflügelservos<br />
verschlossen sowie<br />
nach dem Ausbau des<br />
Fahrwerkes auch die<br />
Fahrwerksschächte.<br />
Die vielen Abziehbil-<br />
der auf Wasser-<br />
basis sind bereits<br />
aufgebracht.<br />
fädeln. Da fliegt nichts mehr weg. Außerdem<br />
kommt nun eine 2,4-GHz-Funkübertragung<br />
von Jeti zum Einsatz, die mit dem Rumpf voller<br />
Starkstromkabel besser zurechtkommen sollte.<br />
Beim erneuten Erstflug zeigt die Tomcat<br />
wieder ein angenehmes Flugverhalten. Mit<br />
ganz zurück geschwenkten Flächen verstärkt<br />
sich die Reaktion auf die Querrudereingaben<br />
und die Tomcat reagiert direkter. Bei geschwenkten<br />
Flächen habe ich 35% Expo auf<br />
Quer gemischt.<br />
Im Langsamflug bei <strong>aus</strong>gefahrenen Flächen<br />
sackt die F-14 sehr stabil durch, wenn sie zu<br />
langsam wird. Sie pendelt dabei nicht, kommt<br />
aber herunter wie ein Ziegelstein. Sobald man<br />
www.fmt-rc.de <strong>FMT</strong>-TEST 49<br />
das Höhenruder neutralisiert, nimmt die Maschine<br />
die Nase herunter und holt Fahrt auf.<br />
Leider braucht sie dann doch einiges an Höhe.<br />
Das Landeverhalten hat mich noch mal<br />
richtig gefordert. Die Maschine lässt sich nicht<br />
besonders langsam fliegen. Durch das fehlende<br />
Seitenruder ist eine schmale Piste schwer<br />
zu treffen – und Graslandungen verträgt das<br />
Fahrwerk aber nicht. Die Tomcat sackt bei<br />
relativ hoher Geschwindigkeit durch, wenn<br />
man sie zum Landen abfangen will.<br />
Das Landeverhalten lässt auf Übergewicht<br />
schließen. Also habe ich das Fahrwerk kurzerhand<br />
<strong>aus</strong>gebaut und damit 118 g gespart.<br />
Im Bugfahrwerksschacht finden ein Haken
50 JETS <strong>FMT</strong> 03 | 11<br />
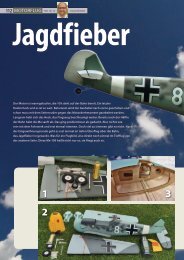
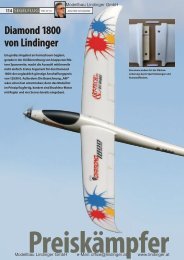
Die Tomcat zieht im Steigflug davon.<br />
Steigleistung und Geschwindigkeit sind zum Modelltyp passend.<br />
<strong>aus</strong> 1,5-mm-Stahldraht und eine Holzverstärkung<br />
ihren Platz, um die nächsten Starts<br />
am Gummiseil zu ermöglichen. Die übrigen<br />
Fahrwerksschächte werden mit den mitgelieferten<br />
Verkleidungen verschlossen, was die<br />
Unterseite enorm glättet. Die Finnen auf der<br />
Unterseite des Rumpfes mussten ebenfalls<br />
entfernt werden, da die nächste Landung das<br />
sonst erledigen würde. Die beiden Rumpfteile<br />
bekommen noch eine Schicht glasklares<br />
Klebeband als Schleifschutz verpasst.<br />
Anstelle der 3.800er Akkus kommen nun<br />
3.200er zum Einsatz, die nochmals 50 g Gewicht<br />
sparen. Damit reduziert sich das Abfluggewicht<br />
von 1.530 auf 1.370 g, was immerhin<br />
10% <strong>aus</strong>macht.<br />
dritter Versuch<br />
Zum nächsten Start wird die Tomcat mit einem<br />
Gummiseil in die Luft geschossen und<br />
auf dem Bauch gelandet. Der Start mit dem<br />
Gummiseil ist vollkommen unproblematisch.<br />
Ein Helfer muss die Maschine mit gestreckten<br />
Armen über seinen Kopf halten. Dann<br />
wird das vorgespannte Gummi eingehängt,<br />
Vollgas gegeben und losgelassen. Das Modell<br />
wird beschleunigt, wobei es natürlich<br />
etwas nach unten gezogen wird. In einer<br />
Höhe von 50 cm bis 1 m klinkt das Seil <strong>aus</strong><br />
Der Schwenkflügel in Aktion<br />
und die Tomcat zieht weg. Werfen lässt sich<br />
die Tomcat wegen der Rumpfform schlecht.<br />
Die Maschine fliegt mit <strong>aus</strong>geklappten<br />
Flächen für ihre Größe recht ruhig, die<br />
Schwerpunktangabe stimmt. Ich habe es<br />
auch etwas hecklastiger versucht, dann wird<br />
sie unruhig auf dem Höhenruder. Bei offenen<br />
Flächen reicht die Querruderwirkung der<br />
Tailerons nur für eine langsame Rolle. Der<br />
maximal mögliche Steigwinkel liegt bei 45<br />
bis 50° und die Fluggeschwindigkeit ist flott<br />
und angemessen.<br />
Mit halb zurück geschwenkten Flächen<br />
wird die Tomcat etwas schneller und muss<br />
mit etwas Höhenruder gehalten werden, da<br />
sie leicht die Nase nach unten nimmt. Erstaunlicherweise<br />
verändert sich auch die Trimmung<br />
um die Längsachse. Das ist besonders lästig,<br />
wenn die Flächen ganz angelegt werden. Dann<br />
verstärkt sich die Wirkung der Querruderfunktion<br />
und das Aussteuern der auftretenden<br />
Trimmänderung wird anspruchsvoller.<br />
Dafür kommen die Rollen nun zackiger und<br />
die Maschine legt noch einen Zahn zu. Auch<br />
die leichte Kopflastigkeit verstärkt sich noch<br />
etwas. Ich vermute, die Trimmänderungen auf<br />
Querruder liegen an einer nicht ganz exakten<br />
Flächenaufhängung. Mit Styropor ist einfach<br />
nicht mehr Präzision zu erwarten.<br />
Auch wenn sich das hier unschön liest, sind<br />
die Trimmänderungen durch<strong>aus</strong> beherrschbar.<br />
Ich habe zwei freie Mischer programmiert, mit<br />
denen ich vom Schwenkflügel 4% Höhenruder<br />
und 4% Querruder links dazu mixe. Dann sind<br />
die Trimmänderungen weg und die Fliegerei<br />
wird entspannter.<br />
Wie schon erwähnt, wird die F-14 bei ganz<br />
zurück geschwenktem Flügel etwas unruhig<br />
auf Querruder. Sie reagiert dann auf Böen und<br />
auch auf Steuereingaben sehr sensibel. In den<br />
Kurven schiebt sie wie das Original etwas mit<br />
dem Heck herum.<br />
Erfreulich ist nach der oben beschriebenen<br />
Abmagerungskur das Landeverhalten: Die<br />
Tomcat segelt bei abgeschalteten Triebwerken<br />
recht gut und lässt sich problemlos in<br />
Richtung Landewiese dirigieren. Die Maschine<br />
liegt dabei absolut ruhig und lässt sich vor<br />
dem Aufsetzten sanft abfangen. Das funktioniert<br />
mit beiden Akkupacks (350 g und 300 g).<br />
Mit dem leichteren Akku (3.200er) wird das<br />
Landeverhalten noch etwas besser.<br />
Die Flugzeit liegt mit den eingesetzten<br />
3.800-mAh-Akkus bei etwa 4 Minuten, mit<br />
den 3.200er Akkus bei 3,5 Minuten. Die beiden<br />
Antriebe brauchen bei Vollgas immerhin<br />
68 A, wobei Halbgas zum flotten Fliegen<br />
reicht.
Datenblatt JetS<br />
modellname: F-14Tomcat<br />
Verwendungszweck: Elektro-Impeller-Jet<br />
hersteller / Vertrieb: <strong>Modellbau</strong> <strong>Lindinger</strong><br />
modelltyp: ARF-Modell <strong>aus</strong> Styro-Formteilen<br />
lieferumfang: Rumpf,Flächen,Höhen-undSeitenleitwerke,lackiertundmitDekorversehen,pneumatisches<br />
EinziehfahrwerkmitRädern,eingebautundverschlaucht,<br />
ServosfürElevons,Schwenkflügel,Bugradlenkungsowie<br />
EZFW-Ventil fertig eingebaut, Kleinteilebeutel mit<br />
Anlenkungdrähten, starrem Fahrwerk, Ruderhörnern,<br />
Klettband, zwei 60-mm-Impeller mit BL-Motoren u.<br />
Reglern, BEC-Stromversorgung, Bauanleitung<br />
bau- u. betriebsanleitung: englisch, 30 Seiten,<br />
56 Abb., Angaben für Ruder<strong>aus</strong>schläge und Schwerpunkt<br />
aufbau:<br />
Rumpf: Styropor,inFormgeschäumt,mehrfarbiglackiert,<br />
Dekor aufgebracht, EZFW und Servos eingebaut<br />
Tragfläche: zweiteiliger Schwenkflügel, Styropor, in<br />
Formgeschäumt,mehrfarbiglackiert,Dekoraufgebracht,<br />
CFK-Rohr und Schwenklager eingebaut<br />
das Fazit<br />
Die F-14 Tomcat von <strong>Modellbau</strong> <strong>Lindinger</strong><br />
ist ein echter Hingucker. Die Maschine sieht<br />
von allen Seiten gut <strong>aus</strong>. Beim Aufbau gibt es<br />
für ein ARF-Modell relativ viele technischen<br />
Details, die nachgearbeitet oder modifiziert<br />
werden müssen. Im Flugbetrieb ist sie auf Grasplätzen<br />
nur ohne Fahrwerk und mit Gummiseil<br />
zu empfehlen. Mit dem optionalen Fahrwerk<br />
<strong>aus</strong>gerüstet braucht es sehr viel guten Asphalt<br />
und eine hohe Landegeschwindigkeit, um die<br />
Maschine unbeschädigt zu landen.<br />
Das vom Hersteller angegebene Fluggewicht<br />
kann nur mit Akkus erreicht werden,<br />
die für die Stromaufnahme der Antriebe<br />
nicht <strong>aus</strong>reichend wären. Die Angaben zu<br />
Schwerpunkt und Ruder<strong>aus</strong>schlägen <strong>aus</strong> der<br />
teilweise lückenhaften Bauanleitung stimmen<br />
und führen zu einem gut steuerbaren<br />
Modell. In der Luft zeigt die Tomcat durch<br />
die Schwenkflügel einige Eigenheiten, die<br />
jedoch beherrschbar sind.<br />
Ich empfehle, die Tomcat nur mit 2,4-GHz-<br />
Systemen zu betreiben, das Gewicht minimal<br />
zu halten und sie mit einem einfachen Gummiseil<br />
zu starten. Hier ist weniger mehr. In<br />
dieser Konfiguration ist die F-14 Tomcat ein<br />
angenehmer Feierabend-Jet mit einzigartigem<br />
Flugbild.<br />
Leitwerke: HLWundSLWinFormgeschäumt,mehrfarbig<br />
lackiert,Dekoraufgebracht,HLWalsPendelruder<strong>aus</strong>geführt<br />
Kabinenhaube: transparent,aufSchaumteilaufzukleben,<br />
abnehmbar mit Magnetverschluss<br />
Einbau Flugakku: 3S-Lipo mit 3.300-4.000 mAh,<br />
Klettbefestigung unter der Kabinenhaube<br />
Preis: 399,- Euro<br />
technische daten:<br />
Spannweite: 1.160 mm (geschwenkt: 700 mm)<br />
Länge: 1.080 mm<br />
Spannweite HLW: 580 mm<br />
Tragflächeninhalt: 21 dm²<br />
Flächenbelastung: 68-72 g/dm²<br />
Tragflächenprofil Wurzel: symmetrisch<br />
Tragflächenprofil Rand: symmetrisch<br />
Profil des HLW: symmetrisch<br />
Gewicht / Herstellerangabe: 1.150 – 1.300 g<br />
Fluggewicht Testmodell ohne Akku: 1.142 g<br />
mit TopFuel 3S 3.800: 1.493 g<br />
mit Wellpower 3S 3.300: 1.430 g<br />
Das Fahrwerk ist nur auf Hartpisten empfehlenswert.<br />
Auf Gras sollte man darauf verzichten, was zudem auch<br />
die Flugleistungen und -Eigenschaften verbessert.<br />
antrieb vom hersteller eingebaut:<br />
Impeller: 2× Ø 60 mm<br />
Motor: BL-Außenläufer 4.800-5.000 K/V<br />
Regler: 2× 40-A-Regler<br />
Akku: Wellpower3S3.300mAh,SLS3S3.300undTopFuel<br />
3S 3800 mAh<br />
rC-Funktionen und komponenten:<br />
Tailerons: 2× Mikroservo<br />
Schwenkflügel: Standardgröße Digital<br />
Bugradlenkung: Mikroservo<br />
Einziehfahrwerk: Mikroservo<br />
verwendete Mischer:SchwenkflügelnachHöhenruder:<br />
4%, Schwenkflügel nach Querruder links: 5%<br />
Fernsteueranlage: mc-24 mit Jeti 2,4-GHz-Modul<br />
Empfänger: Jeti RX 8<br />
Empf.Akku: BEC mit 1,5 A<br />
bezug: <strong>Modellbau</strong> <strong>Lindinger</strong> GmbH, Industriestr. 10,<br />
A-4560 Inzersdorf/Kirchdorf, Tel.: +43 (0)7582 813130,<br />
Internet: www.lindinger.at